基于单片机的红外测距仪的设计
基于单片机的机器人用红外测距仪系统设计 (1)

第37卷第4期应用科技V o.l 37, .42010年4月Appli ed Sc i ence and T echno l ogyA pr .2010do :i 10.3969/.j issn .1009-671X.2010.04.003基于单片机的机器人用红外测距仪系统设计唐秦崴,瞿哲奕,朱熀秋(江苏大学电气信息工程学院,江苏镇江212013)摘 要:针对机器人智能倒车防护的问题,提出了以单片机AT 89S52为控制核心,采用红外测距技术设计机器人用红外测距仪系统,由单片机处理环境信息,红外测距仪发出停车提示或直接执行停车,不需要驾驶员亲自根据信息作判断,具有显著的智能化.论文采用红外管和AT 89S52单片机,设计和制作了红外测距仪系统硬件电路,并且开发了相关软件.试验表明:研制的基于单片机的红外测距仪,机器人停车时距预期位置最大误差不超过4c m,工作可靠,性能良好,确保机器人倒车的智能性和稳定性.关键词:单片机;机器人;红外测距仪;系统设计中图分类号:TP273.4 文献标识码:A 文章编号:1009-671X (2010)04-0011-04Desi gn of i nfrared range fi nder syste m for a robotbased on a si ngle chip m icroco mputerTANG Q in w e,i QU Zhe y,i Z HU Huang qiu(Schoo l of E lectrica l and In f o r m ati on Eng i neer i ng ,Jiangsu U niversit y ,Zhenjiang 212000,Ch i na)A bstract :A i m i n g at the proble m of r obot inte lligent par k i n g pr o tecti o n ,an i n frared range fi n der is designed by using the i n frared rang i n g techno logy for par k i n g syste m based on a si n g le ch ip m icr oco mputer AT89S52.The i n fra red range finder can send out par k i n g si g na lpro m ptly or execute parking directly .The driver does not need to j u dge infor m ati o n by h i m se l;f t h e i n for m ati o n is processed by a sing le ch i p m icroco m puter AT89S52,and t h e infrared range fi n der has disti n ct i n telli g ent f u nction.This paper i n troduces t h e soft w are and har dw are c ircuits o f an infrared range finder parking syste m ,w hich are designed and deve l o ped w it h an infrared tube and a si n g le ch i p m i c roco m puter .The experi m ental resu lts have shown that the i n frared range based on a si n g le chip m icroco m puter operates reliab l y and m easures exactl y ,having good perfor m ance w ith the m ax i m um error of no tm ore than 4c m,thus the robo ts 'i n telli g ence and stab ility are i n sured.K eywords :si n g l e ch i p m icroco m puter ;robo ;t i n frared range finder ;syste m desi g n收稿日期:2009 12 03.项目基金:国家高技术研究发展计划基金资助项目(2007AA04Z213);江苏省高等学校大学生实践创新训练计划基金资助项目(2008 297).作者简介:唐秦崴(1986 ),男,大学本科,主要研究方向:机器人编程及硬件制作,E m ai:l tqw86107@yahoo .co .机器人智能倒车防护有利于机器人安全可靠运行.目前投入应用的机器人智能倒车防护技术主要有2种:一种是车载雷达(超声波技术)测距倒车防护[1-4];一种是摄像头视觉防护[5-6].车载雷达测距十分精确,智能化程度较高,但造价较为昂贵;摄像头视觉防护虽然可以让驾驶员实时获取身后的环境信息,但对距离的测量则仍需要外加其他设备的辅助,驾驶员仍然需要亲自通过肉眼判断身后的情况,智能化有所不足.基于红外管以及单片机技术的机器人用测距仪采用单片机独立处理环境信息并发出停车提示或直接执行停车,不需要驾驶员亲自根据信息作判断,能够实现智能化防护提示或停车.采用的红外技术虽然在精准度上不及超声波技术,但对于机器人已经足够,并且对突然出现的行人的敏感度不亚于超声波技术,所以拥有同超声波技术同等的安全性.同时由于红外发射、接受装置以及使用的AT89S52单片机芯片成本低廉,本系统较雷达测距仪更易于商业推广.1 系统硬件设计机器人用红外测距仪系统由3大部分组成:4路红外发射装置以及红外接收装置,实现汽车尾部左后、左中、右中和右后方向的障碍物检测;声光报警电路,实现停车报警;单片机及其开发板组成的控制电路,实现针对获得的障碍物检测信息进行判断和决策.系统硬件框图如图1所示.试验时使用的机器人及单片机板如图2所示.图1系统硬件框图图2 机器人及单片机板1.1 控制电路采用AT89S52作为控制器[7~10].由其构成的测量控制系统电路简单、体积轻巧、可靠性高、编程方便.硬件电路框图如图3所示.图3 硬件电路框图单片机的P2.1编程为输出口,输出38.4k H z 方波,持续0.8m s .使用的红外探测器对38.5k H z 的红外光最为敏感,经过实验得到在输出38.4k H z 的红外光时,红外探测器的障碍物判断距离为41c m.实际的产品中可以通过选择其他的红外探测器的型号来获取更远或者更近的障碍物判断距离.单片机的P1.2至P1.5编程为输入口.外接电路连接红外探测器,获取检测障碍物的信息.单片机的P2.2编程为输出口,外接电路连接蜂鸣器,实现蜂鸣器的报警提示;P2.3至P2.6也编程为输出口,外接电路连接指示灯,实现指示灯的报警提示.1.2 红外发射和接收装置1.2.1 红外发射电路4路红外发射电路的结构完全相同,并且并联在P2.1口上,由P2.1口输出38.4k H z 的方波信号.控制所连的8550三极管通断,从而实现红外发射管发出38.4kH z 的红外光.1.2.2 红外接收电路4路红外接收电路结构也完全相同,只是分别连接到P1.2、P1.3、P1.4和P1.5这4个端口上,分别接受各红外探测器的检测情况.12 应 用 科 技 第37卷1.3 声光报警电路1.3.1 蜂鸣器报警电路声音报警是非常有效的报警方式.本电路采用的是最为简单实用的蜂鸣器实现报警.蜂鸣器报警硬件实现简单,工作十分可靠,编程也非常容易实现.当接收到控制器发过来的报警信号(P2.2口输出变为低电平并维持1s)时,蜂鸣器导通发声.1.3.2 指示灯报警电路指示灯报警也是非常有效的报警方式.其硬件实现非常简单,也十分可靠.编程与蜂鸣器实现类似.4个指示灯分别对应4个红外探测器,当需要报警时,P2.3口会输出幅值为5V 的矩形波,持续3s ,使指示灯持续闪烁3s 报警.2 系统软件设计系统使用的控制芯片是AT M EL 公司的AT89S52.这是一款高性能、低功耗的8位单片机,与MCS-51单片机产品兼容.内含8KB I SP 可反复擦写1000次的FL ASH 只读程序存储器.具有32个可编程I/O 口线、3个16位定时器或计数器、8个中断源、全双工UART 串行通道.软件编写和调试都十分方便.图4 主程序程序由主程序(图4)、中断服务程序(图5)、发送及状态读取子程序(图6)和决策子程序(图7)组成.先由主程序进行系统初始化,然后调用发送及状态读取子程序发射定频率的红外光,并将4个红外探测器的状态读进来.接着调用决策子程序针对各种状态进行是否报警以及蜂鸣器发声和相应指示灯闪烁的判断及执行.4个指示灯分别对应左后、左中、右中、右后4个红外探测器.中断服务程序为定时器0的计时溢出中断,作用是定时对发射口进行取反,以实现发出固定频率的红外光.图5中断服务程序图6发射及状态读取子程序图7 决策子程序3 试验结果试验采用欧鹏科技有限公司研制的针对AT89S52的最小系统板和 轮式宝贝机器人 作为硬件构架,使用自主研发的机器人用红外测距仪系统板实现红外信号的发射、采集与报警等功能.宝贝机器人如图8所示.13 第4期唐秦崴,等:基于单片机的机器人用红外测距仪系统设计图8 带有红外测距仪的宝贝机器人经过多次试验,试验效果良好,机器人能够在自制的小型车库中进行较为准确的自动停车并报警.停车时与车库壁的距离在37~43c m,试验结果接近预期的距离41c m,最大误差不超过4c m.4 结束语针对机器人智能倒车的防护问题,设计了文中提出的红外测距仪系统.研制的机器人用红外测距仪系统可以安装到实际汽车中,既降低了智能机器人的成本,又极大地提高了倒车时的安全性.参考文献:[1]陆 军,米文龙,朱齐丹,等.超声波测距系统在移动机器人中的设计与应用[J].电子技术应用,2007,6:8587.[2]邱瑞昌,姜久春.泊车用超声波测距仪的研制[J].电子产品世界,2001(9):11 13.[3]曾德怀,谢存禧,张 铁,等.行走机器人的超声波测距系统的研究[J].机械科学与技术,2004,23(5):613 616.[4]孙牵宇,童 峰,许肖梅.一种大角度范围的高精度超声波测距处理方法[J].厦门大学学报:自然科学版,2006,45(4):513 517.[5]彭 刚,黄心汉,王 敏,等.基于视觉引导和超声测距的运动目标跟踪和抓取[J].高技术通讯,2002(6):74 79.[6]祝 琨,杨唐文,阮秋琦,等.基于双目视觉的运动物体实时跟踪与测距[J].机器人,2009,31(4):327 334.[7]秦志强.C51单片机应用与C语言程序设计[M].北京:电子工业出版社,2007.[8]赵德安.单片机原理与应用[M].北京:机械工业出版社,2005.[9]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004.[10]高国琴.微型计算机控制技术[M].北京:机械工业出版社,(上接第10页)参考文献:[1]曾菊荣.用改进电桥测量高值电阻[J].宜春学报,2006(6):105 106.[2]白雪冰,张佳薇,赵真非.智能化木材含水率自动测试系统的开发[J].木材工业,2006(3):35 37.[3]符时明.用数字式冲击电流计测高电阻[J].物理与工程,2005(1):35 38.[4]郑会忠,晏春红.高值电阻测量的分析[J].唐山师范学院学报,2007(9):14 16.[5]张廷成,张 磊,王政平.模拟积分器在电子式电流互感器中的应用与分析[J].应用科技,2008(5):56 58. [6]周继承,黎 飞,肖庆中.数字电路故障诊断[J].应用科技,2008(2):29 31.[7]YAN G C K,D e SILVA C W,W ANG X G.Exper i m enta lm ode li ng and i n telli g ent contro l o f a wood dry i ng k iln[J].In ternati onal Journa l o f A dapti ve Contro l and S i gnal P ro cessi ng,2008(8):14 17.[8]S ANT I N I E J,TOMA SELL I I.Contro l of t he dry i ng processthrough t he re lati onshi p o f w ood and we t bulb temperatures [J].D ry i ng T echno logy,2007(7):33 37.14应 用 科 技 第37卷。
基于单片机的测距仪设计
I四川理工学院毕业设计(论文)基于单片机的测距仪设计QQ:271021773四川理工学院计算机学院二O 0 九年六月基于单片机的测距仪设计摘要本文详细介绍了一种基于单片机的脉冲反射式超声测距系统。
该系统是以空气中超声波的传播速度为确定条件,利用发射超声波与反射回波时间差来测量待测距离。
论文概述了超声波检测的发展及基本原理,介绍超声传感器的工作机理及特性,对影响测距系统的一些主要参数进行了讨论。
并且在介绍超声测距系统功能的基础上,提出了系统的总体构成。
针对测距系统发射、接收、检测、显示部分的总体设计方案进行了论证。
进一步介绍了STC89C52RC单片机在系统中的应用,分析了系统各部分的硬件及软件实现。
关键字:单片机;测距仪;超声波;超声波传感器IThe design of range finder base on single-chipABSTRACTThis paper introduces a method based on single chip pulse reflex ultrasonic ranging system. this system can measure the distance which is based on the speed ofultrasonic and used the time difference of launch ultrasonic and reflection echo.this paper summarizes the development and basic principle of the ultraonic testing,the working mechanism and characteristics of the ultrasonic sensors.there is a discussion about some major parameters of the influence ranging system.based on the introduces of the ultrasonic ranging system function,The overall system is proposed.according to transmitting and receiving, detection, and display part of distance measuring system's overall desgin,the schemes are discussed.the further introduction of this paper is the application of STC89C52RC single chip microcomputer in the system, and the analysis of all the parts of the system hardware and software realization.Keywords:single chip;range finder; ultrasonic wave; ultrasonic sensorII目录第1章概述 (1)第2章方案论证 (2)2.1发射电路 (2)2.2接收电路 (5)第3章超声波简介 (8)3.1超声波的特点及其分类 (8)3.3 超声波的效应 (10)第4章超声波传感器 (11)4.1超声波传感器的种类及其特点 (11)4.2超声波传感器的外形及内部结构 (13)4.3超声波传感器的选择材料 (14)4.4 TCT40-16T/R超声波传感器 (15)第5章系统主要硬件................................ 错误!未定义书签。
基于单片机的红外线测温仪的设计之电路原理图、PCB图提交
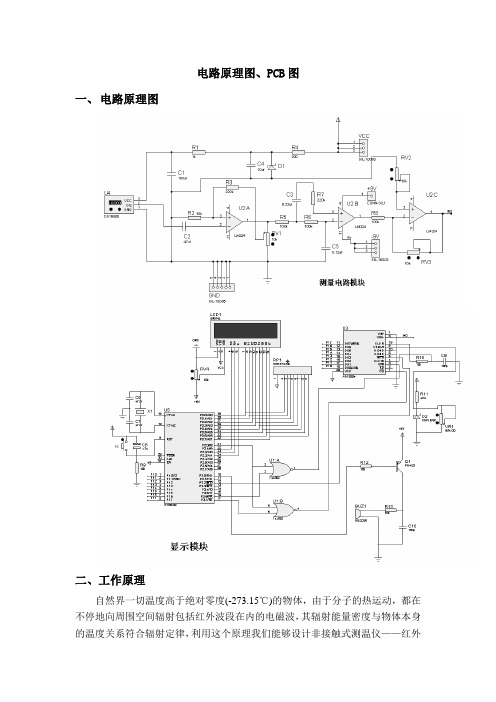
电路原理图、PCB图
一、电路原理图
二、工作原理
自然界一切温度高于绝对零度(-273.15℃)的物体,由于分子的热运动,都在不停地向周围空间辐射包括红外波段在内的电磁波,其辐射能量密度与物体本身的温度关系符合辐射定律,利用这个原理我们能够设计非接触式测温仪——红外
测温仪。
采用AT89C51系列单片机进行数据的采集存储和处理。
由于信号只有一个输入,为了避免不必要的消耗,本设计A/D转换器采用的是ADC0804。
芯片的CLKIN端和CLKR端配合可以由芯片自身产生时钟脉冲。
测量物体表面辐射能量的热释电传感器有效调节外界环境的温度起伏影响,由于传感器探测到的人体红外线信号较弱,当转化为电压后需要通过放大器放大电压信号。
因为探测器测到的信号可能掺杂了外界环境的某些因素,所以放大电路中要加入低通滤波电路把多余的杂信号过滤掉。
探头使用的是红外线传感器,它能接收人体发射出的红外线并使之转换成电压信号。
设计选用的是PM611单元热释电传感器,这种传感器虽是单灵敏元,由于它采用一个接收元和二个并联的补偿元串接的结构,故也能有效地补偿环境温度起伏,振动等干扰影响。
它的工作温度是-20℃——+70 ℃,特别适合测量人体的温度,当然也适合一些动物的测量。
液晶显示器选用的是2行16个字的液晶显示屏,当测量按钮按下时,整个电路开始工作,物体表面辐射的能量经热释电传感器接收后,将热辐射信号转化为电信号,经由放大电路放大后到达A/D模数转换器,AT89C51单片机作为CPU 接收经A/D转换后的数字信号,经数据处理后转换成物体表面温度显示在液晶显示屏上。
三、PCB板图
四、3D效果图:
正面图
反面图。
基于单片机的红外测温仪的设计毕业设计

1摘要为了克服传统温度计测量温度的主要缺点——需要测量者与被测目标近距离接触和测量不方便,在顾及仪器测量高精度前提下,以追求最低成本为原则,研制了非接触式热释电红外测温仪,实现了对物体表面温度快速准确的测量。
本文主要设计了红外测温仪的整体系统构架,根据热释电原理,主要针对人体体温测量进行了具体的设计开发,包括整体方案,总体电路及各单元电路的设计,软件设计,硬件焊接及系统调试,并利用设计出来的红外测温仪在环境温度30℃下对人体温度进行了测量,对人体的温度测量的误差低于±0.1℃,提高了测量精度。
红外测温仪的设计主要为适应人体体温快速无接触测量的需要。
此外还介绍了热释电红外传感器的工作原理以及比较适合人体红外检测的热释电传感器PM611的优点和等效电路,阐述了基于热释电传感器的红外测温仪的工作原理,讨论了该系统的设计与实现方法,简单介绍了测温系统的适用条件。
关键词:温度测量热释电PM611AbstractTo decrease the limitation of traditional method of temperature measuring such as close contact between measurer and the target and inconvenience when measuring, we developed a non-contact type piezoelectric infrared thermometer, realizes fast and accurate surface temperature measurements. This article also designed the overall system architecture infrared thermometer. Then under the piezoelectric principle, aimed at human body temperature measurement for a specific design, development including hardware, peripherals technology, SCM, and the host program . Designed by using the infrared thermometer at ambient temperature 30℃on the human body were measured on the human body temperature measurement error is less a ±0.1℃improve the measurement accuracy. This thermometer mainly applies to no-contact, speedy body-heat measurement. This article mainly introduces operational principles of piezoelectric infrared sensor and the structure of hydroelectrically sensor PM611.It formulates the theory of the thermometer based on hydroelectrically sensor and studies how to design and implement of the system.Finally,it indicates the conditional demand of the system.Keywords: Temperature Measurement Piezoelectrically PM611毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
基于单片机的红外无线测距仪

• 183•因为红外测距是一种非接触检测技术,它受到影响的因素少,相比于其他的测距仪有较大的优势;更能应对恶劣环境,功能也更加的可靠。
因此可广泛应用于各种工业设计中。
1.概述随着科学技术的快速发展,研究出了多种新型测距仪器。
系统进行近距离高精度的距离测量,因此采用了红外无线测距模块最为测距传感器。
此外系统采用了单片机作为中央处理器,LCD12864作为显示距离的屏幕。
同时拥有距离超过预设值报警功能。
系统在保证安全可靠的前提下可以进行高精度近距离的测距功能。
基于单片机的红外无线测距仪具有相对与其他测距仪精度更高但距离也更近。
因此可以用于近距离高精度的测距需求当中。
与此同时红外测距仪的响应速度极快,相对于其他类型的传感器,更加迅速的反应也使得红外测距传感器可以应用于相对复杂的场景。
2.系统方案框图设计本设计由单片机红外测距模块是由12864液晶显示电路、按键电路、报警电路和电源电路组成。
(1)通过红外测距模块检测距离(测距范围10-80cm),通过PCF8591将红外模块的模拟数值转化为数字数值,然后传给单片机处理。
(2)LCD12864液晶第一行实时显示距离,第二行显示设置的阈值。
(3)阈值可以通过2个按键调节。
(4)超过阈值后,蜂鸣器鸣叫报警。
3.系统具体模块方案确定本设计采用了单片机、显示模块、测距模块以及按键电路和报警电路几部分组成,来实现系统的功能。
3.1 单片机芯片的选择采用STC89C51单片机来作为系统的核心处理器,相比于其他的单片机51单片机的性能更加可靠,价格低廉,编程相对简单。
而且可以满足系统的设计需求。
通过对系统的相关程序的编写,调试最后再烧进单片机内来实现功能。
3.2 声音报警方案的选择系统通过蜂鸣器来实现报警。
蜂鸣器接入系统电路中,当距离超过设定的报警值时,蜂鸣器通过蜂鸣来发出警报。
通过报警可以提醒用户距离超过先前的设定范围。
这样不进了以降低成本还可以达到系统的需求。
3.3 显示方案的选择基于单片机的红外无线测距仪采用了LCD12864来进行显示距离,以及设置的报警值。
基于单片机的红外线测温仪的设计
(二二 〇 一 三 年 十二 月科研训练学校代码: 10128 学 号:题 目:基于单片机的红外线测温仪的设计 学生姓名:X X X学 院:信息工程学院 系 别:电子系 班 级:通信10-1班 指导教师:基于单片机的红外线测温仪的设计XXX(内蒙古工业大学信息工程学院内蒙古呼和浩特10080)摘要:为了克服传统温度计测量温度的主要缺点——需要测量者与被测目标近距离接触以及测量不方便。
在考虑仪器测量高精度前提下,以追求最低成本为原则,研制了基于单片机的非接触式热释电红外测温仪,实现了对物体表面温度快速准确的测量。
本文也设计了红外测温仪的整体系统构架,介绍一种采用51单片机和TN系列传感器实现红外测温。
红外测温打破了传统的接触式测温模式,它根据被测物体的红外辐射能量来确定物体的温度,不与被测物体接触,具有不扰动被测物体温度分布场,温度分辨率高、响应速度快、测温范围广,稳定性好、可同时测量环境温度和目标温度的特点。
此外还介绍了热释电红外传感器的工作原理以及比较适合人体红外检测的热释电传感器PM611的优点和等效电路,阐述了基于热释电传感器的红外测温仪的工作原理,讨论了该系统的设计与实现方法,简单介绍了测温系统的适用条件。
关键词:温度测量;单片机;红外线;非接触式热释电中图分类号:TP212.11 文献标识码:ADesign of infrared thermometer based on single chip microcomputerXXX(Information Engineering Institute,Inner Mongolia University of Technology,Inner Mongolia,Hohhot,10080,China)Abstract: To decrease the limitation of traditional method of temperature measuring such as close contact between measurer and the target and inconvenience when measuring, we developed a non-contact type piezoelectric infrared thermometer, realizes fast and accurate surface temperature measurements. This article also designed the overall system architecture infrared thermometer,introduces a 51 single-chip microcomputer and TN series sensor was adopted to realize infrared measuring temperature. Infrared measuring temperature broke the traditional contact-type temperature measurement model, based on the infrared radiation energy of the object to be tested to determine the temperature of the object, not contact with the object under test, with no disturbance temperature distribution field object to be tested, the temperature of high resolution, fast response, wide temperature range, good stability, can simultaneously measure the environment temperature, and the characteristics of the target temperature.This article mainly introduces operational principles of piezoelectric infrared sensor and the structure of hydroelectrically sensor PM611.It formulates the theory of the thermometer based on hydroelectrically sensor and studies how to design and implement of the system.Finally,it indicates the conditional demand of the system.Key words: temperature measurement; single chip microcomputer; infrared; non-contact type piezoelectric由于医学发展的需要,在很多情况下,一般的温度计已经满足不了快速而又准确的测温要求,例如车站和机场等人口密度较大的地方进行人体温度测量。
基于单片机的机器人用红外测距仪系统设计
基 于单 片 机 的机 器 人 用源自红 外 测 距 仪 系统 设计 唐秦崴 , 哲奕 , 瞿 朱烷秋
( 江苏大学 电气信 息工程 学院 , 苏 镇 江 2 2 1 ) 江 10 3 摘 要: 针对机器人智能倒车 防护 的问题 , 提出了以单片机 A 8 S 2为控 制核心 , T9 5 采用红外测 距技术设 计机器
p rr u e .Th x e i n a e u t a e s o h tt e i fa e a g a e n a sn l h p mir c mpu e p r ts e e p rme tlr s lsh v h wn t a h n r d r n e b s d o i ge c i c o o r tr o e a e r la l n a u e x cl eib y a d me s r s e a ty,ha i o d p ro a e wih t e ma i m ro fno r h n 4 c ,t ust e vng g o e r nc t h x mu e r ro tmo e t a m f m h h
b s d o i g e c p m ir c m p e a e n a sn l hi c o o ut r
T N i—e,Q h —i Z un —i A G Qnw i U Z ey, HU H agqu
(c ol f l tcl n nom tnE g er g J ns nvrt, hnin 100 hn ) Sho o e r a adI r ao n i e n , i guU ie i Z ej g 2 0 ,C ia E c i f i n i a sy a 2
Ab t a t s r c :Ai n tt r b e o o o n elg n a ki o e t n,a n a e a e fn e sd sg e y u・ mi g a he p o lm fr b ti tlie tp r ngpr tc i o n i f r d r ng i d ri e i n d b r sn he ifa e a g n e h o o y frp r n y tm a e n a sn l hi c o o u e i g t n rr d r n i g tc n lg o a kig s se b s d o i g e c p mi r c mp t rAT8 5 9S 2.Th nr - e i fa
基于STC单片机的红外测距传感器设计与实现
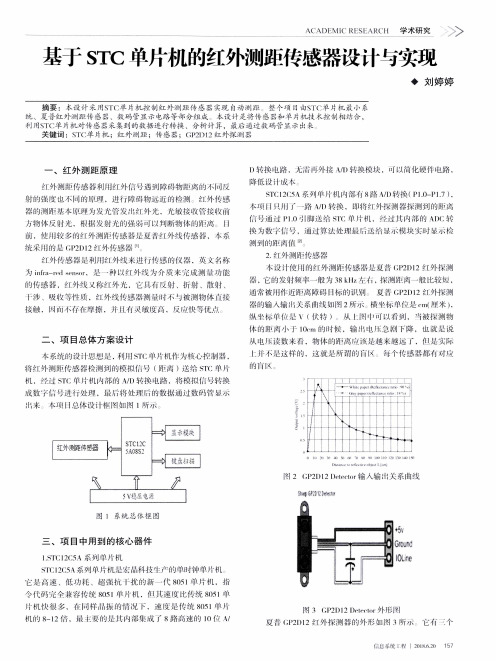
方物怵 反射 比 ,根掘 发划‘光的 强弱 可 以划断物 体 的 离 H
L ] il,他 川较 多 的红 外测 距 传感 足复 红 外线 传感 ,小 系
统 采 啪 0足 ( I,2D12红 外传感器 ”
红 外传感 是 利川  ̄:ml-线 米进 行 传感 的仪器 ,英 文 称
为 infl,a—r l eli r.是 一种 以红 外线 为 介 质 术完 成测 i ll-功能
的传感 器 , 外线 义称红 外 ,它具 有 反身寸、折射 、敞 射 、
十 涉 、吸收 等性 质 ,红 外线 传感 器测 时 j被测 物体 ff接
接 触 ,
峰擦 ,行 有 灵敏度商 ,反 怏 等优点
二 、项 目总体 方 案 设 计
本系统 n0没 汁思 想是 ,{ilJtJ s 片机作 为核心 控 制 . 将 红外 测距 传感 搽俭洲 到 的模-fl2f 号 (距 离 )送给 _r( 片 fJ【,经过 s PC'Y'-J4一机 I/f部的 AID转换 电路 ,将模 拟 f 号转换 成 数 : ii号进行 处 ,最 后将 处 的 数据通 过 数码管 不 …来 水项 体设 汁 ̄lxIq 1所示
J 纠、 则州 f々感 的『ll 线卡ll地线 /f 能接 反 , lJ14 烧毁 的危 险 , 血过 州 1 】 外 测 传感 I 螺 丝 llJ‘以州 榆 ib!lJlfl‘ i. 陔
外 f0感 的 柃 洲 70;I…I 1 IO-8f)r-III
四 、 项 目软 件 设 计
÷瓠 Gro ̄d I 删
冈 3 CP21)l2 1)ele{·h 外 形 夏 ( P21)12-91- ̄, 探 测 器 的 外 形 I冬J 3昕 示 它 行 t个
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表2 机电工程学院毕业设计课题开题报告
总体框图:
红外测距仪的硬件主要由单片机系统电路、复位电路、电源电路、时钟电路、LED显示模块、AD转换模块、红外收发模块等组成。
通过红外收发模块发射和吸收红外线,经过AD转换成单片机系统电路可识别的电信号,再传输给单片机系统电路进行电信号的处理并计算,得到所测得的距离。
最后使用LED显示模块呈现出测量的距离。
流程图:
在本次设计中红外收发模块主要功能是信息采集,信号的放大以及信号的转换,所以软件需要进行对收发端信号的数据处理,经过计算时间差令其转换成距离差,再通过程序设计把计算出的距离在LED显示模块中显示出最终测得的距离。