Z3050摇臂钻床电气原理图
Z摇臂钻床电气控制电路
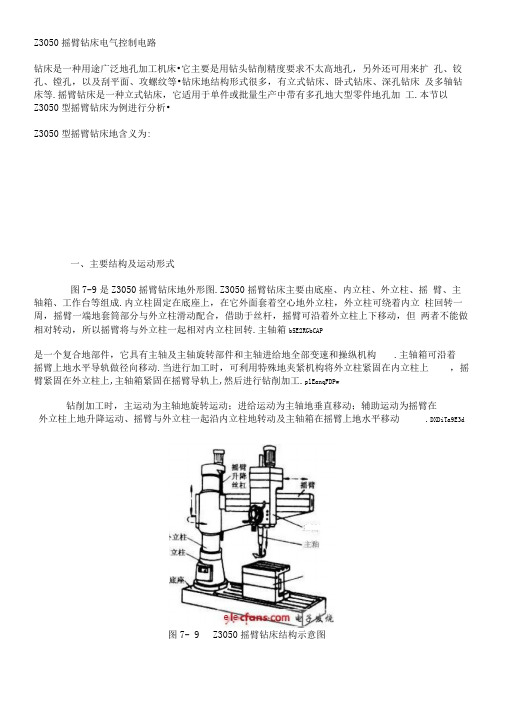
Z3050摇臂钻床电气控制电路钻床是一种用途广泛地孔加工机床•它主要是用钻头钻削精度要求不太高地孔,另外还可用来扩孔、铰孔、镗孔,以及刮平面、攻螺纹等•钻床地结构形式很多,有立式钻床、卧式钻床、深孔钻床及多轴钻床等.摇臂钻床是一种立式钻床,它适用于单件或批量生产中带有多孔地大型零件地孔加工.本节以Z3050型摇臂钻床为例进行分析•Z3050型摇臂钻床地含义为:一、主要结构及运动形式图7-9是Z3050摇臂钻床地外形图.Z3050摇臂钻床主要由底座、内立柱、外立柱、摇臂、主轴箱、工作台等组成.内立柱固定在底座上,在它外面套着空心地外立柱,外立柱可绕着内立柱回转一周,摇臂一端地套筒部分与外立柱滑动配合,借助于丝杆,摇臂可沿着外立柱上下移动,但两者不能做相对转动,所以摇臂将与外立柱一起相对内立柱回转.主轴箱b5E2RGbCAP是一个复合地部件,它具有主轴及主轴旋转部件和主轴进给地全部变速和操纵机构.主轴箱可沿着摇臂上地水平导轨做径向移动.当进行加工时,可利用特殊地夹紧机构将外立柱紧固在内立柱上,摇臂紧固在外立柱上,主轴箱紧固在摇臂导轨上,然后进行钻削加工.plEanqFDPw钻削加工时,主运动为主轴地旋转运动;进给运动为主轴地垂直移动;辅助运动为摇臂在外立柱上地升降运动、摇臂与外立柱一起沿内立柱地转动及主轴箱在摇臂上地水平移动.DXDiTa9E3d主釉e e图7- 9 Z3050摇臂钻床结构示意图摇臂钻床地电力拖动及控制要求1 •由于摇臂钻床地运动部件较多,为简化传动装置,需使用多台电动机拖动,主轴电动机承担主钻削及进给任务,摇臂升降、夹紧放松和冷却泵各用一台电动机拖动.RTCrpUDGiT2•为了适应多种加工方式地要求,主轴及进给应在较大范围内调速•但这些调速都是机械调速,用手柄操作变速箱调速,对电动机无任何调速要求•主轴变速机构与进给变速机构在一个变速箱内,由主轴电动机拖动.5PCzVD7HxA3•加工螺纹时要求主轴能正反转.摇臂钻床地正反转一般用机械方法实现,电动机只需单方向旋转.4•摇臂升降由单独地一台电动机拖动,要求能实现正反转.5•摇臂地夹紧与放松以及立柱地夹紧与放松由一台异步电动机配合液压装置来完成,要求这台电动机能正反转.摇臂地回转和主轴箱地径向移动在中小型摇臂钻床上都采用手动.jLBHrnAILg6•钻削加工时,为对刀具及工件进行冷却,需要一台冷却泵电动机拖动冷却泵输送冷却液.7•各部分电路之间有必要地保护和联锁.三、电气控制线路分析图7- 10是Z3050型摇臂钻床地电气控制线路地主电路和控制电路图.■ c o o ___o elecfahs com 电 * • r—i <x*x > I ui v 、I 77T I 3- ________ k 2 d [)(10 elecfanscom 电孑反*友i r M4K*蛊■9 4H«*A■ W 直H--H« -H 991V K ar彌4HM*ft :勒 s a n出*&««»««妙岗 **<一)主电路分析Z3050 型摇臂钻床共有四台电动机, 除冷却泵电动机采用开关直接起动外, 其余三台异步电动机均采用接触器直接起动. xHAQX74J0XM1是主轴电动机,由交流接触器KMI控制,只要求单方向旋转,主铀地正反转由机械手柄操作.M1装在主轴箱顶部,带动主轴及进给传动系统,热继电器FRI是过载保护元件.LDAYtRyKfEM2是摇臂升降电动机,装于主轴顶部,用接触器KM2和KM3空制正反转.因为该电动机短时间工作, 故不设过载保护电器. Zzz6ZB2LtkM3是液压油泵电动机,可以做正向转动和反向转动.正向旋转和反向旋转地起动与停止由接触器KM4和KM5空制.热继电器FR2是液压油泵电动机地过载保护电器.该电动机地主要作用是供给夹紧装置压力油、实现摇臂和立柱地夹紧与松开. dvzfvkwMI1M4是冷却泵电动机,功率很小,由开关直接起动和停止.<二).控制电路分析1.主轴电动机MI 地控制按起动按钮SB2,则接触器KMI吸合并自锁,使主电动机Ml起动运行,同时指示灯HL3亮.按停止按钮SB1,则接触器KMI释放,使主电动机M1停止旋转,同时指示灯HL3熄灭.rqyn14ZNXI2.摇臂升降控制<1)摇臂上升.Z3050型摇臂钻床摇臂地升降由M2拖动,SB3和SB4分别为摇臂升、降地点动按钮<装在主轴箱地面板上,其安装位置如图7—9所示),由SB3 SB4和KM2 KM3组成具有双重互锁地M2正反转点动控制电路.因为摇臂平时是夹紧在外立柱上地,所以在摇臂升降之前,先要把摇臂松开,再由M2驱动升降;摇臂升降到位后,再重新将它夹紧.而摇臂地松、紧是由液压系统完成地.在电磁阀YV线圈通电吸合地条件下,液压泵电动机M3正转,正向供出压力油进入摇臂地松开油腔,推动松开机构使摇臂松开,摇臂松开后,行程开关SQ2动作、SQ3复位;若M3反转,则反向供出压力油进入摇臂地夹紧油腔,推动夹紧机构使摇臂夹紧,摇臂夹紧后,行程开关SQ3动作、SQ2复位.由此可见,摇臂升降地电气控制是与松紧机构液压一机械系统<M3与YV地控制配合进行地.下面以摇臂地上升为例, 分析控制地全过程:EmxvxOtOco按住摇臂上升按钮SBMSB3动断触点断开,切断KM3线圈支路;SB3动合触点闭合<1-5)-时间继电器KT线圈通电一KT动合触点闭合<13—14),KM4线圈通电,M3正转;延时动合触点<1 - 17)闭合,电磁阀线圈YV通电,摇臂松开一行程开关SQ2动作一SQ2动断触点<6- 13)断开,KM4线圈断电,M3停转;SQ2动合触点<6—8)闭合,KM2线圈通电,M2正转,摇臂上升一摇臂上升到位后松开SB4KM2线圈断电,M2停转;KT线圈断电一延时1〜3S,KT动合触点<1- 17)断开,丫V线圈通过SQ3<—17)-仍然通电;KT动断触点<17- 18)闭合,KM5线圈通电,M3反转,摇臂夹紧一摇臂夹紧后,压下行程开关SQ3,SQ勧断触点<1- 17)断开,YV线圈断电;KM5线圈断电,M3停转. SixE2yXPq5摇臂地下降由SB4控制KM-M2反转来实现,其过程可自行分析.时间继电器KT地作用是在摇臂升降到位、M2停转后,延时1〜3s再起动M3将摇臂夹紧,其延时时间视从M2停转到摇臂静止地时间长短而定.KT 为断电延时类型, 在进行电路分析时应注意. 6ewMyirQFL如上所述,摇臂松开由行程开关SQ2发出信号,而摇臂夹紧后由行程开关SQ3发出信号如果夹紧机构地液压系统出现故障,摇臂夹不紧;或者因SQ3地位置安装不当,在摇臂已夹紧后SQ3仍不能动作,则SQ3地动断触点<1—17)长时间不能断开,使液压泵电动机M3出现长期过载,因此M3须由热继电器FR2进行过载保护.kavU42VRUs摇臂升降地限位保护由行程开关SQl实现,SQl有两对动断触点:SQ—1<5—6)实现上限位保护,SQl —2<7—6)实现下限位保护. y6v3ALoS89<2)主轴箱和立柱松、紧地控制.主轴箱和立柱地松、紧是同时进行地,SB5和SB6分别为松开与夹紧控制按钮,由它们点动控制KM4 KM5>控制M3地正、反转,由于SB5 SB6地动断触点<17—20—21)串联在YV线圈支路中•所以在操作SB5 SB6使M3点动作地过程中,电磁阀YV线圈不吸合,液压泵供出地压力油进入主轴箱和立柱地松开、夹紧油腔, 推动松、紧机构实现主轴箱和立柱地松开、夹紧. 同时由行程开关SQ4控制指示灯发出信号:主轴箱和立柱夹紧时,SQ4地动断触点<201—202)断开而动合触点<201—203)闭合,指示灯HLI灭HL2亮;反之,在松开时SQ4复位,HLI亮而HL2灭.M2ub6vSTnP<三)辅助电路包括照明和信号指示电路•照明电路地工作电压为安全电压36V,信号指示灯地工作电压为6V,均由控制变压器TC提供.0YujCfmUCw四、Z3050型摇臂钻床常见电气故障地诊断与检修Z3050 型摇臂钻床控制电路地独特之处,在于其摇臂升降及摇臂、立柱和主轴箱松开与夹紧地电路部分, 下面主要分析这部分电路地常见故障:eUts8ZQVRd<一)摇臂不能松开摇臂作升降运动地前提是摇臂必须完全松开. 摇臂和主轴箱、立柱地松、紧都是通过液压泵电动机M3地正反转来实现地,因此先检查一下主轴箱和立柱地松、紧是否正常.如果正常,则说明故障不在两者地公共电路中,而在摇臂松开地专用电路上.如时间继电器KT地线圈有无断线,其动合触点<1 —17)、<13—14)在闭合时是否接触良好,限位开关SQl地触点SQl—1<5—6)、SQl—2<7—6)有无接触不良,等等.sQsAEJkW5T如果主轴箱和立柱地松开也不正常,则故障多发生在接触器KM4和液压泵电动机M3这部分电路上.如KM4线圈断线、主触点接触不良,KM5地动断互锁触点<14—15)接触不良等.如果是M3 或FR2出现故障,则摇臂、立柱和主轴箱既不能松开,也不能夹紧.GMsIasNXkA<二)摇臂不能升降除前述摇臂不能松开地原因之外, 可能地原因还有:<1 )行程开关SQ2地动作不正常,这是导致摇臂不能升降最常见地故障.如SQ2地安装位置移动,使得摇臂松开后,SQ2不能动作,或者是液压系统地故障导致摇臂放松不够,SQ2也不会动作,摇臂就无法升降.SQ2地位置应结合机械、液压系统进行调整,然后紧固.TIrRGchYzg<2 )摇臂升降电动机M2控制其正反转地接触器KM2 KM3以及相关电路发生故障,也会造成摇臂不能升降. 在排除了其他故障之后, 应对此进行检查. 7EqZcWLZNX<3 )如果摇臂是上升正常而不能下降, 或是下降正常而不能上升, 则应单独检查相关地电路及电器部件<如按钮开关、接触器、限位开关地有关触点等). lzq7IGf02E<三)摇臂上升或下降到极限位置时, 限位保护失灵检查限位保护开关SQI,通常是SQI损坏或是其安装位置移动.<四)摇臂升降到位后夹不紧如果摇臂升降到位后夹不紧<而不是不能夹紧),通常是行程开关SQ3地故障造成地.如果SQ3移位或安装位置不当,使SQ3在夹紧动作未完全结束就提前吸合,M3提前停转,从而造成夹不紧. zvpgeqJ1hk<五)摇臂地松紧动作正常, 但主轴箱和立柱地松、紧动作不正常应重点检查:<1)控制按钮SB5 SB6,其触点有无接触不良,或接线松动•<2)液压系统出现故障.。
Z3050型摇臂钻床电气控制线路7

(4)在涉及到控制电路有问题时,有线路的导线连接松
动,电路元器件损坏,电气元件触点接触不良等原因。
7.位臵开关与按钮开关的作用有何异同 位臵开关与按钮都是靠外力的作用来使触点动作的,
按钮是靠人主观操作,是主令控制;位臵开关是靠被
控制机械装臵来操作,按照预先设定的位臵来使触点 动作,是位臵控制。
8.有2台电动机M1和M2,要求(1)M1先启动,经过
降到位后,再重新将其夹紧。
(2)摇臂升降控制
摇臂的松、紧是由液压系统完成的。在电磁阀YV线圈通电吸合的条 件下,液压泵电动机M3正转,正向供出压力油进入摇臂的松开油腔,推
动松开机构使摇臂松开,摇臂松开后,行程开关SQ2动作、SQ3复位;
若M3反转,则反向供出压力油进入摇臂的夹紧油腔,推动夹紧机构使摇 臂夹紧,摇臂夹紧后,行程开关SQ3动作、SQ2复位。由此可见,摇臂 升降的电气控制是松紧机构液压与机械系统(M3与YV)的控制配合进 行的。
(1)摇臂不能上升(或下降)
故障排除方法:
① 检查行程开关SQ2触点、安装位臵或损坏情况,并予以修 复; ② 检查接触器KM2或摇臂升降电动机M2,并予以修复;
③ 检查系统故障原因、位臵移动或损坏,并予以修复;
④ 检查相序,并予以修复。
(2)摇臂上升(下降)到预定位臵后摇臂不能夹紧
故障分析方法:
称。
2.QS、FU、KM、FR、KT、SB、SQ是什么电器元 件?画出这些电器元件的图形符号,并写出中文名称。
2.QS、FU、KM、FR、KT、SB、SQ是什么电器元
件?画出这些电器元件的图形符号,并写出中文名
称。
3.电流继电器在电路中的作用是什么?它和热 继电器有何异同? 电流继电器在电路中作为电动机或线路过载 保护或短路保护;热继电器在电路中作为电动 机过载保护,但不能作为短路保护用; 电流继电器是根据电流的电磁效应原理工作 的,热继电器是根据电流的热效应原理工作的;
二、Z3050摇臂钻床电气控制线路

QF1
SB1 L1 L2 L3
SB2
SB4 SB5 SB6 KT3 KT2 SB7
QF2
QF3
KM4 KM5 KM2
SQ4 SB3 KM1 KM1
SQ1a SQ2
SQ1b SQ2 KT2 KT1 SQ3 KT3 KT1 KT1 KM4 SA
KM1
KM3
SB5
SB4
KM3 KM2 KM5
M 3~
M 3~
M 3~
M 3~
EL HL2 HL1 QF1 KM4
KM5 6 17 6 6
KT2 KT3 18 17 18
YA1 YA2
M4
M1
M2
M3
17 18 5 16 5 15 6 18 6 × 20 5 5 6 5 5
22
17
扳动QF2,冷却泵电动机M4起动。合上照明灯开关,照明灯亮。
M 3~
M 3~
EL HL2 HL1 QF1 KM1 4 13 4 10 4
KT1 KM2
KM3 KM4
KM5 6 17 6 6
KT2 KT3 18 17 18
YA1 YA2
M4
M1
M2
M3
17 18 5 16 5 15 6 18 6 × 20 5 5 6 5 5
22
17
主轴电动机M1的控制 : 按下启动按钮SB3(12区),接触器KM1吸合并自锁, 主轴电动机M1启动运行,同时指示灯HL2(9区)亮。
Z3050型摇臂钻床电路图分析
1 2 3 4 5 摇臂升降电动机 上升 下降 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 电源进线 电源开关 冷却泵电动机 主轴电动机 液压夹紧电动机 指示灯 主电机 松开 夹紧 控制变压器 短路保护 照明 主电 电源 门控开关 总停止 启动停止 摇臂升降控制 上升 下降 液压松夹控制 松开 夹紧 液压松夹延时 液压分配开关 立柱 综合 主轴箱
型摇臂钻床电气控制线路

3 一般钻床旳控制要求
1. 采用多台电动机拖动,主轴电动机承担主钻削及进给任 务,摇臂升降,夹紧放松和冷却泵各用一台电动机,共四台 电动机拖动。
2. 4台电动机容量均较小,采用直接起动方式,加工螺纹时 要求主轴正反转,但采用机械措施实现,主轴电动机单向旋转。
3、两台电动机启停控制
控制要求:
有2台电动机M1和M2,要求(1)M1先开启,经过10 s 后M2开启;(2)M2开启后,M1立即停止。试设计其控制 线路。
请设计这个控制电路原理图
KM1 KM2 KM2 SB2 SB1
FR2 FR1 KM1 KT KM2
L1 L2 L3 QF
FU1
FU2
FR1
FR2
1.JLXK1行程开关构造
34
当运动部件旳挡铁碰压行程开关旳滚轮时,杠杆连同转轴一起转动,使凸 轮推动撞块,当撞块被压到一定位置时,推动微动开关迅速动作,使其动断触 点断开,动合触点闭合。
2、接近开关
接近开关是一种非接触式旳检测装置,能检测金属物或 非金属物(仅对光电式接近开关)存在是否,只要当运动旳 物体接近它一定距离时就能发出接近信号,以控制运动物体 旳位置。接近开关不等于行程开关,它具有计数作用。
JS7系列型号含义:
时间继电器旳图形符号及文字符号
通电式
瞬 时
常闭触点
动 作
常开触点
常开 延 通电后 时 延时闭合
动 常闭 作 通电后
延时断开
断电式
常闭触点
常开触点
常闭 断电后 延时闭合 常开 断电后 延时断开
1、绕线式电动机串电阻开启控制线路
Z3050摇臂钻床电路原理与维修
“维修电工”技能考核项目Z3050型摇臂钻床电气控制电路原理与维修主编:童光法重庆市铜梁职业教育中心2013年5月Z2030 摇臂钻床电气原理图QS1KM1KM2KM3KM4KM5YAKT FU11Z3050型摇臂钻床电气控制一、 Z3050型摇臂钻床介绍 (一)作用钻床是一种用途广泛孔加工机床,可用来钻孔、扩孔、绞孔、攻螺纹及修刮端面多种形式的加工。
钻床的结构形式很多,有立式钻床、卧室钻床、深孔钻床等。
摇臂钻床是一种立式钻床,它用于单件或批量生产中带有多孔大型零件的孔加工,是一般机械加工车间常用的机床。
(二)、结构摇臂钻床主要由底座、内外立座、摇臂、主轴箱和工作台组成。
摇臂的一端为套筒,套筒在外立柱上,幵借助丝杆的正、反转可沿外立柱上下移动。
主轴箱安装在摇臂的水平轨上可通过手轮操作使其在水平导轨上沿摇臂移动。
加工时。
根据工件高度的不同,摇臂借助于丝杆可带着主轴箱沿外立柱上下升降。
在升降之前,应自动将摇臂松开,再进行升降,主轴箱摇臂工作台电源开内立柱主轴主轴电动机升降电动机升降丝杆当达到所需的位置时,摇臂自动夹紧在立柱上。
摇臂钻床钻削加工分为工作运动和辅助运动。
工作运动包括:主运动(主轴的旋转运动)和进给运动(主轴轴向运动);辅助运动包括:主轴箱沿摇臂的横向移动,摇臂的回转和升降运动。
钻削加工时,钻头一面旋转一面作纵向进给。
1、采用4台电动机拖动,分别是主轴电动机M1,摇臂升降电动机M2,液压泵电动机(即松紧电机)M3和冷却泵电动机M4。
2、电机运动方式:(1)主轴电动机M1的运动:为了适应多种形式的加工要求,摇臂钻床主轴的旋转及进给运动有较大的调速范围,一般情况下多由机械变速机构实现。
主轴变速机构与进给变速机构均装在主轴箱内。
在加工螺纹时,要求主轴能正反转。
摇臂钻床主轴正反转一般采用机械方法实现。
因此主轴电动机仅需要单向旋转。
主轴操纵机构液压系统:安装在主轴箱内,用以实现主轴正反、停车制动、空挡、预选及变速;(2)升降电机M2运动方式:摇臂升降由单独的一台电动机M2拖动,要求能实现正反转。
z3050摇臂钻床电气控制
z3050摇臂钻床电气控制Z3050摇臂钻床电气线路控制摘要钻床是一种用途广泛的孔加工机床。
它主要用钻头钻精度要求不高的孔,另外还可用来钻孔、镗孔、扩孔、铰孔、攻丝及修刮端面等。
因此要求钻床的主运动和进给运动有较宽的调速范围。
钻床的结构类型很多,有立式钻床、卧式钻床、台式钻床、多轴钻床、深孔钻床等。
摇臂钻床是一种立式钻床,它适用于单件或成批生产带有多孔大型零件的孔加工,是一般机械加工车间常见的机床。
【关键词】:钻床结构用途ABSTRACTThe drilling machine is a kind of widely hole processing machine tool. It is mainly used for drill holes with high precision, also can be used for drilling, boring, reaming, reaming, tapping and scrape the end. Therefore asked the drill main movement and feed movement has a wide speed range.The structure of many types of drilling machine, vertical drilling, horizontal drilling, drilling machine, multi-axis drilling machine, deep hole drilling. Rocker drilling machine is a kind of vertical drilling machine, which is suitable for a single or bulk production with a porous large parts machining, general machinery processing workshop is a common machine tool.第一章绪论1.1摇臂钻床型号的含义:Z—钻床,3—摇臂,0-摇臂钻床型, 50—最大钻孔直径为50mm1.2摇臂钻床的结构组成:Z3050摇臂钻床的构造如图所示。
Z3050摇臂钻床电气原理图

Z3050摇臂钻床电气原理图1 主电路设计(2~7区)三相电源L1 L2 L3由电源开关QS控制,熔断器FU1实现对全电路的短路保护(1区)。
从2区开始就是主电路。
主电路有4台电动机。
1)M4(2区)是冷却泵电动机,带动冷却泵供给工件冷却液。
由于M4容量较小,因此不需要过载保护,由转换开关QS2直接控制。
M4直接起动,单向旋转。
2)M1(3区) 是主轴电动机,带动主轴的旋转运动和垂直运动,是主运动和进给运动电动机。
它由KM1的主触点控制,其控制线圈在13区。
热继电器FR1做过载保护,其常闭触点在13区。
M1直接起动,单向旋转。
主轴的正反转由液压系统和正反转摩擦离合器来实现,空档,制动及变速也由液压系统来实现。
3)M2(4~5区) 是摇臂升降电动机,带动摇臂沿立柱的上下移动。
它由KM2,KM3的主触点控制正反转,其控制线圈分别在15,16区。
电动机M2是短时运行,因此不需要过载保护。
4)M3(6~7区) 是液压泵电动机,带动液压泵送出压力油以实现摇臂的松开,夹紧和主轴箱的松开,夹紧控制。
它由KM4,KM5的主触点控制其正反转,控制线圈分别在17,18区。
热继电器FR2作过载保护。
其常闭触点在17区。
熔断器FU2作摇臂升降电动机M2,液压电动机M3和控制电路的短路保护。
2 控制电路的设计(13~19控制电区)控制电路由控制变压器TC(8区) 将380V交流电源降为127V.1)主轴电动机M1的控制电路(13区)。
主轴电动机M1的控制电路是典型的电动机单向连续控制电路。
SB1,SB2分别为砂轮电动机M1的停止和启动按钮。
2)摇臂升降的控制电路(14~19区)。
摇臂升降由摇臂升降电动机M2作动力,按钮SB3,SB4分别为摇臂上升,下降的点动按钮,和KM3,KM2组成接触器按钮双重连锁的正反转点动控制电路(15~16区)。
由于摇臂的升降控制须与夹紧机构液压系统紧密配合:摇臂升降前,先把摇臂松开,再由M2驱动升降;摇臂升降到位后,再重新夹紧。
Z3050型摇臂钻床电气控制线路6

电压继电器的文字符号与文字符号
(3)电流原则控制绕线式电动机串电阻启动控制线路
KA4的作用是保证开始启动时全部电阻接入转子电路
?
KA1、KA2、KA3的电 流释放值:
KA1>KA2>KA3
KA4的作用是保证开始启动时全部电阻接入转子电路
三、拓展练习
(一)自动运(点动) 2 怎样保证摇臂上升时,摇臂先松开,再上升?(或者液压泵电动 机M3先启动,摇臂升降电动机再启动)(摇臂松开到位后,SQ2 (6-8)受压闭合,KM2或KM3才能得电) 3 怎样保证摇臂上升到位后,摇臂完全停止,再锁紧?(或者摇臂 电动机先停止,液压泵电动机再启动(摇臂升降电动机有惯性) (SB3松开,KT线圈失电,KM2线圈失电,KT触点(1-17)延时断 开(延时时间与摇臂升降电动机的惯性有关系),KM5延时得电, SQ3夹紧到位后断开,KM5失电) 4 主轴箱和立柱放松夹紧时,怎样保证压力油不进入摇臂加紧放松 回路?(SB5、SB6采用复合按钮) 5 说明SQ1、SQ2、SQ3、SQ4、KT的作用。
欠电压继电器是当电压降至某一规定范围时动作的电压继电器; 零电压继电器是欠电压继电器的一种特殊形式,是当继电器的端电
压降至0或接近消失时才动作的电压继电器。
过电压继电器是当电压大于整定值时动作的电压继电器,主要 用于对电路或设备作过电压保护,常用的过电压继电器为JT4—A系 列,其动作电压可在105%~120%额定电压范围内调整。
工艺过程
1 起始时,容器内液体排空,阀门均关闭。
2 按下启动按钮SB后,阀门A打开,甲液体流入容器,待甲液体的 液面达到I位置时,发出关闭阀门A,打开阀门B的命令。
3 阀门B打开后,乙液体流入容器,待液面达到H位置时,发出关闭
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z3050摇臂钻床电气原理图
1 主电路设计(2~7区)
三相电源L1 L2 L3由电源开关QS控制,熔断器FU1实现对全电路的短路保护(1区)。
从2区开始就是主电路。
主电路有4台电动机。
1)M4(2区)是冷却泵电动机,带动冷却泵供给工件冷却液。
由于M4容量较小,因此不需要过载保护,由转换开关QS2直接控制。
M4直接起动,单向旋转。
2)M1(3区) 是主轴电动机,带动主轴的旋转运动和垂直运动,是主运动和进给运动电动机。
它由KM1的主触点控制,其控制线圈在13区。
热继电器FR1做过载保护,其常闭触点在13区。
M1直接起动,单向旋转。
主轴的正反转由液压系统和正反转摩擦离合器来实现,空档,制动及变速也由液压系统来实现。
3)M2(4~5区) 是摇臂升降电动机,带动摇臂沿立柱的上下移动。
它由
KM2,KM3的主触点控制正反转,其控制线圈分别在15,16区。
电动机M2是短时运行,因此不需要过载保护。
4)M3(6~7区) 是液压泵电动机,带动液压泵送出压力油以实现摇臂的松开,夹紧和主轴箱的松开,夹紧控制。
它由KM4,KM5的主触点控制其正反转,控制线圈分别在17,18区。
热继电器FR2作过载保
护。
其常闭触点在17区。
熔断器FU2作摇臂升降电动机M2,液压电动机M3和控制电路的短路保护。
2 控制电路的设计(13~19控制电区)
控制电路由控制变压器TC(8区) 将380V交流电源降为127V.
1)主轴电动机M1的控制电路(13区)。
主轴电动机M1的控制电路是典型的电动机单向连续控制电路。
SB1,SB2分别为砂轮电动机M1的停止和启动按钮。
2)摇臂升降的控制电路(14~19区)。
摇臂升降由摇臂升降电动机M2作动力,按钮SB3,SB4分别为摇臂上升,下降的点动按钮,和KM3,KM2组成接触器按钮双重连锁的正反转点动控制电路(15~16区)。
由于摇臂的升降控制须与夹紧机构液压系统紧密配合:摇臂升降前,先把摇臂松开,再由M2驱动升降;摇臂升降到位后,再重新夹紧。
摇臂的松开和加紧过程为:
摇臂松开:
摇臂夹紧:
由此可见,摇臂升降的电气控制是与松紧机构液压-机械系统(M3与YV)的控制配合进行的。
现以摇臂上升为例,来分析控制的全过程:
摇臂的下降由SB4控制KM3使M2反转来实现,工作过程与摇臂上升相似。
时间继电器KT为断电延时型,其作用是在摇臂升降到位,M2停转后,延时1~3s再起动M3将摇臂夹紧,其延时时间以摇臂升降电动机从切断电源到停止时惯性作用的时间而定。
摇臂升降的限位保护由行程开关SQ1实现,SQ1有两对常闭触点:SQ1-1实现上限位保护,SQ1-2实现下限位保护。
摇臂松开由行程开关SQ2控制,摇臂夹紧由行程开关SQ3控制。
如果夹紧机构液压系统出现故障,摇臂不能夹紧;或者因SQ3的位置安装不当,在摇臂已夹紧后SQ3仍不能动作,那么SQ3的常闭触点长时间不能断开,会使液压泵电动机M3处于长期过载状态。
因此,M3采用热继电器FR2作过载保护。
3)主轴箱和立柱松紧的控制(17~18区)。
主轴箱和立柱的松紧控制是同时进行的。
SB5和SB6分别为松开和夹紧控制按钮,和KM4,KM5组成接触器连锁的正反转电动控制电路。
其工作过程如下:
由于SB5,SB6的常闭触点串联在YV线圈支路中,因此在按下SB5,SB6使M3点动正反转的过程中,电磁阀YV线圈不吸合,液压泵送出压力油,进入主轴箱和立柱的松开,夹紧油箱,推动松紧机构实现主轴箱的松开和夹紧。
3 辅助电路设计(8~12区)
辅助电路包括信号灯电路(9~11区)和照明电路(12区)。
信号灯的工作电压6V由控制变压器TC提供。
照明灯的工作电压36V仍有控制变压器TC提供。
按下照明灯开关SA,钻床照明指示灯EL亮。
为保证安全,EL的一端接地。
熔断器FU3作照明电路的短路保护。
作者:baixuegood2008 2008-6-12 12:30 回复此发言
--------------------------------------------------------------------------------
4 摇臂钻床的电气原理图设计
三参数的选定:
1)热继电器的选定
FR1的选定:
FR1实现对电动机M1的过载保护。
按照“热继电器元件的额定电流应接近或略大于电动机的额定电流”的原则:
=(0.95~1.05)(取系数为1)(1)应大于等于6.8A.
又因为鼠笼式三相异步电动机M1采用直接启动方式,为△接法,故必须采用三相结构带断相保护的热继电器。
所以,FR1的型号应选定为JR16-20/3D. 规格为9号热元件整定电流6.8A.
同理,FR2的型号选定为JR16-20/3D. 规格为6号热元件整定电流2.1A
2) 接触器的选定
接触器KM1的选定:
主触点额定电流一般是根据电动机容量来计算,即
≥ × /K (2)
K为经验常数,一般取1~1.4;为电动机额定线电压
为电动机功率;为接触器主触点额定电流。
所以,≥3000/380=7.9A.(K取1)。
在这里取10A就已经满足要求。
但是,对于频繁启动、正反转工作的电动机,为了防止接触器主触点的烧蚀和过早损坏,应将其额定电流降级使用,所以选择型号CJ10-20。
同理,KM2,KM3,KM4,KM5应选择性的型号为CJ10-10.(这里不再一一计算)。
3)熔断器的选定
FU3的选定:
因为FU3对EL(40W,36V)其保护作用,故熔体额定电流
≥40/36=1.1A 取=2A
因为熔断器额定电流不小于熔体额定电流,所以熔断器电流选为15A.
所以FU3的型号应选定为RL1-15,规格为380V 15A配2A熔体。
FU2的选定:
对于多台电动机长期共用一个熔断器保护的情况,按照经验公式来选择:
≥(1.5~2.5)+(3)
即≥1.5×3.7+2.1=7.55A (常数取1.5)这里取=10A.熔断器额定电流选为15A。
所以,FU2的型号应选定为RL1-15,规格为380V 15A配10A的熔体。
FU1的选定:
按照上面的经验公式计算:
≥2.5×6.8+3.7+2.1=22.8A (常数取2.5)这里取25A。
所以,FU1的型号应选定为RL1-60,规格为380V 60A配25A熔体。
4)电磁阀的选定
考虑到电磁阀在控制电路中所起的作用(在通电吸合后,产生电磁力使阀杆移动,达到控制油路开闭及换向目的),以及额定吸力、额定行程、操作频率等方面,其型号选定为MFJ1-3.线圈电压为127V(与控制变压器电压保持一致)。
2)时间继电器的选定
因为控制电路中的时间继电器是断电延时型,且有动合触
点,因此选择其型号为JS7-4A。
线圈电压为127V(与控制变压器电压保持致)。
3)控制变压器的选定
当控制回路电器较多,电路复杂时,一般采用变压器降低电压,以提高电路的安全可靠性。
控制变压器主要根据所需容量及一次侧和二次侧的电压等级来选择,其容量可以根据经验公式开计算:
≥0.6 +1.5 (4)
为控制回路承担最负载时所有电器所需的总功率;
为同时启动的电器总吸持功率;
由电气原理图知:KM1、KM4、YV可以同时启动。
所以根据公式:
≥0.6(22+11+48)+1.5×48=120.6
所以,其容量选定为150.
又由于需要,该变压器须带有抽头。
根据控制电路电压不宜过高和机床电路的一般取用原则,以127-36-6.3V为宜。
所以,控制变压器的型号选定为BK-150.
4)按钮的选定
根据控制需要,所有按钮只需一个动合触点和一个动断触点,因此可选型号为LA19-11. 需要带指示灯的,可选型号为LA19-11D. 指示灯电压为6V. 颜色按规定选择。
其他元器件的选定见元器件明细表。
元器件明细表
符号名称型号规格数量用途
M1 主轴电动机Y100L2-4 3kW 6.8A 1420r/min 1 主运动和进给运动动力
M2 摇臂升降电动机Y90L-4 1.5kW 3.7A 1400r/min 1 摇臂升降动力
M3 液压泵电动机Y802-4 0.75kW 2.1A 1390r/min 1 驱动液压泵。