车载激光扫描技术在公路测量中的应用
激光雷达在路面检测中的应用研究

激光雷达在路面检测中的应用研究激光雷达已经成为了众多领域中不可或缺的技术,其中包括车辆自动驾驶领域。
自动驾驶需要对路况进行高效准确的识别与判断,而其中路面状态是必须要考虑的一个因素。
而随着激光雷达技术的不断进步,越来越多的研究人员认为激光雷达能够提供一种高效准确的路面检测方法。
一、激光雷达检测路面的原理激光雷达是利用光脉冲方法对物体进行探测和测距的技术。
从本质上来看,激光雷达和常见的雷达具有相似的原理,即都是利用物体反射回来的信号来获得关于物体位置和特征等信息。
激光雷达能够实现的最小探测距离是几个米到几百米范围。
激光雷达通过发射激光,并记录激光从发射到接收所需的时间,根据光速计算出物体与激光雷达之间的距离。
激光雷达通过采集反射激光的强度、时间和方向等数据,可以获得关于被测物体的三维空间点云信息。
在道路检测中,激光雷达能够实现对路面高程、坡度和形态等数据的获取,从而为后续的路面状态评估和道路设计等工作提供有效的数据支持。
二、激光雷达在路面检测中的应用激光雷达在路面检测中的应用主要包括道路面形态检测、路面高程检测、路面坡度检测和路面结构检测等方面。
其中,激光雷达技术在数字地图建立、车辆行驶定位和反作弊等领域也有着广泛的应用。
1、道路面形态检测道路面形态指的是道路表面的平整程度。
平整的路面对于车辆驾驶的稳定性和行驶安全性有着重要作用。
激光雷达被广泛应用于道路表面的平整度检测方面,在道路施工、道路维修和工程验收等方面具有较为重要的作用。
采用激光雷达技术检测道路面形态,可以快速高效地获得路面平整度数据。
激光雷达在对路面进行扫描的过程中,能够高精度地记录下路面每个小区域的坡度和高程等信息。
通过这些数据可以构建出路面形态的高度图,进而反映出道路表面的平整度。
这种方法不仅大大降低了道路检测的难度和工期,同时也提高了检测精度和效率。
2、路面高程检测路面高程是指道路表面相对平面的高低程度,通过路面高程数据可以有效评估和判断道路表面的平整性。
基于车载三维激光扫描的城市道路竣工测量探讨

基于车载三维激光扫描的城市道路竣工测量探讨贾峻峰广州市城市规划勘测设计研究院 广东广州 510060摘要:车载三维激光扫描系统融合了多种传感器和数据源,可以自动、迅速地获取道路的全方位信息。
其扫描速度迅捷、数据信息丰富、精确度高、采集过程安全简单,并能节省人力。
此技术显著提高了外业生产效率,并降低了生产成本。
对车载三维激光扫描技术在道路工程竣工测量中的内外业处理流程的研究结果表明:该技术的精度可达到1∶500测图精度要求,满足城市高架路竣工规划测绘的精度需求。
该技术方案是切实可行的,且能高效地提高生产效率。
关键词:车载三维激光扫描 道路竣工测量 点云数据精度 测图精度中图分类号:U415文献标识码:A 文章编号:1672-3791(2024)02-0142-03 Exploration of Urban Road Completion Survey Based on Vehicle-Mounted 3D Laser ScanningJIA JunfengGuangzhou Research Institute of Urban Planning, Survey and Design, Guangzhou, Guangdong Province, 510060ChinaAbstract:The vehicle-mounted 3D laser scanning system integrates multiple sensors and data sources, and it can automatically and quickly obtain comprehensive information of the road. It has fast scanning speed, rich data infor‐mation and high accuracy, and the collection process is safe and simple and can save manpower. This technology significantly improves field production efficiency and reduces production costs. The article provides a detailed in‐troduction of the internal and external processing flow of vehicle-mounted 3D laser scanning technology in the completion measurement of road engineering. Rresearch results indicate that the accuracy of this technology can reach 1∶500 mapping accuracy requirements, and meet the accuracy requirements of urban elevated road comple‐tion planning and surveying. This technical solution is feasible, and it can efficiently improve production efficiency. Key Words: Vehicle-mounted 3D laser scanning; Road completion measurement; Point cloud data; Mapping accuracy1 三维激光扫描技术工作原理三维激光扫描仪系统主要集成三维激光扫描仪、惯性仪、全景相机、测速仪、卫星定位模块和车辆刚性平台装配控制模块[1]。
浅析激光路面平整度检测系统

浅析激光路面平整度检测系统激光路面平整度检测系统是一种能够精确评估道路平整度的高科技设备。
随着国家对道路质量的要求不断提高,激光路面平整度检测系统逐渐成为道路施工和维护的必备工具。
本文将从系统的工作原理、检测的方法以及应用场景等方面进行浅析。
一、系统工作原理激光路面平整度检测系统主要由激光扫描仪、GPS系统、计算机以及数据处理软件等组成。
在工作时,激光扫描仪会将激光束聚焦到路面上,反射回来的激光信号被接收器采集。
系统会借助GPS定位系统来获取车辆的位置和行驶方向信息,并将采集到的数据传输给计算机。
计算机会对数据进行处理,生成一份详细的路面平整度报告。
二、检测的方法系统的检测方法是非接触式的,因此可以快速且精确地评估路面平整度。
首先,检测车辆会以较低的速度行驶在待检测的道路上。
激光扫描仪会以高速扫描整个道路表面,采集道路表面的高度数据。
接下来,计算机会使用特定的算法将高度数据转换为平面坐标系上的数据,并由此计算出道路的平整度。
系统可以同时检测多个车道,时效性极高。
三、应用场景激光路面平整度检测系统在道路施工和维护中具有广泛的应用场景。
首先,在新建道路中,该系统可以快速检测出道路表面的平整度,及时发现问题并进行修复,确保道路质量符合国家标准。
其次,该系统可以用于日常道路维护中,随时监测道路表面的平整度,并及时采取措施进行修复。
最后,该系统可以用于道路交通监管,帮助部门准确了解道路的情况,确保道路的安全通行。
综上所述,激光路面平整度检测系统是一种高效、精确的道路质量监测设备。
未来该系统的应用将进一步得到拓展,相信它将在道路施工和维护中发挥越来越重要的作用。
车载激光扫描技术
数据滤波与平滑
进一步处理点云数据,去除噪声和异常值,平滑 数以减小数据量,方 便存储和传输。
CHAPTER 04
车载激光扫描技术在不同领域的应 用案例
城市规划与建模
1 2 3
城市规划
数据裁剪
根据需要,对数据进行裁 剪和筛选,以去除不必要 的部分。
点云数据生成
激光扫描仪数据获取
通过激光扫描仪获取目标物体的三维坐标信息。
点云数据生成算法
利用点云数据生成算法,将多个扫描数据拼接成一个完整的点云数 据。
数据格式转换
将点云数据转换为常用的数据格式,如XYZ、LAS等。
数据后处理
数据分类
技术创新和产业升级将进一步推动车载激光扫描技术的发展和应用,实现更高效、更智能的 交通出行。
未来发展方向与挑战
未来发展方向
研究和发展更高精度的激光雷达技术,提高激光 扫描的精度和稳定性。
加强数据处理算法和软件技术的研发,提高数据 处理的速度和精度。
未来发展方向与挑战
• 探索和应用更多种传感器融合技术,提高激光扫描的适应性和 稳定性。
工作原理
激光扫描仪按照一定的角度旋转 ,同时车辆在行驶过程中不断通 过GPS和IMU获取位置和姿态信
息。
激光扫描仪发射的激光束遇到目 标物体后反射回来,通过计算激 光束往返时间,得到目标物体的
距离信息。
控制系统根据获取的距离信息、 车辆的位置和姿态信息生成三维
地形数据。
激光扫描仪性能指标
01
02
车辆平台选择
选择适合车载激光扫描设备的车 辆平台,考虑车辆的稳定性、行 驶速度、车辆改造难度等因素。
车载三维激光扫描系统在公路断面测量中的应用
第41卷第8期2018年8月测绘与空间地理信息GEOMATICS&SPATIALINFORMATIONTECHNOLOGYVol.41ꎬNo.8Aug.ꎬ2018收稿日期:2018-03-26作者简介:王克峰(1972-)ꎬ男ꎬ甘肃通渭人ꎬ教授级高级工程师ꎬ注册测绘师ꎬ硕士ꎬ2006年毕业于武汉大学测绘工程专业ꎬ主要从事地理信息系统数据采集与处理方面的研究㊁生产和管理工作ꎮ车载三维激光扫描系统在公路断面测量中的应用王克峰1ꎬ平世越2(1.新疆维吾尔自治区第一测绘院ꎬ新疆昌吉831100ꎻ2.昌吉州国土资源勘测规划院ꎬ新疆昌吉831100)摘要:探索了带有GPS/IMU的车载RIEGLVMZ 1000三维激光扫描系统ꎬ采集公路线路测量的三维点云数据ꎬ对其进行噪声消除㊁坐标转换㊁三维建模等处理ꎬ实现对公路线路纵横断面图的测绘的技术方法ꎬ并通过生产项目对该技术方法予以应用和验证ꎬ对应用中应注意的关键问题进行了总结ꎮ关键词:车载三维激光扫描系统ꎻ点云数据ꎻ断面测量中图分类号:P228㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-5867(2018)08-0195-03ApplicationofVehicle-mounted3DLaserScanningSysteminHighwaySectionMeasurementWANGKefeng1ꎬPINGShiyue2(1.TheFirstInstituteofSurveyingandMappingofXinjiangUygurAutonomousRegionꎬChangji831100ꎬChinaꎻ2.LandResourcesSurveyandPlanningInstituteofChangjiPrefectureꎬChangji831100ꎬChina)Abstract:Thisarticleexploredthetechnologyandmethodofthe3Dpointclouddatacollectingforhighwayusingthevehicle-mounted3DlaserscanningsystemwithGPS/IMUꎬandthentothedataimplementingnoiseeliminationꎬcoordinatetransformationandbuilding3Dmodelingꎬaccomplishingsurveyingandmappingofhighwayprofileandcrosssectionsꎬappliedandverifiedthetechnologyandmethodthroughengineeringprojectꎬsummarizedthekeyissuesthatshouldbepaidattention.Keywords:vehicle-mounted3Dlaserscanningsystemꎻpointclouddataꎻsectionmeasurement0㊀引㊀言近年来ꎬ我国经济社会发生了翻天覆地的变化ꎬ公路建设的成就令世人瞩目ꎮ一方面经济社会的向前发展为公路建设注入了必要的资金ꎻ另一方面公路建设的推进极大地促进了经济社会的向前发展ꎮ随着经济社会的不断进步ꎬ公路建设的速度在进一步加快ꎮ传统测量模式由于其数据获取模式单一㊁自动化程度不高㊁劳动强度大㊁工作效率低下等弊端ꎬ已不能满足新时代公路建设对公路测绘的新要求ꎮ如何实现公路建设需要的空间数据的自动㊁高效㊁准确的获取ꎬ并对其并实现快速处理ꎬ形成公路建设需要的可靠成果ꎬ是测绘地理信息工作者一直研究和追求的目标之一ꎮ车载三维激光扫描系统集成多种测量原理和多传感器为一体ꎬ可进行综合性的地面测量ꎬ可快速㊁自动㊁连续的获取高精度地面三维空间数据ꎬ作为一种新型的三维空间数据获取手段ꎬ被逐渐应用于测绘地理信息数据获取工作中ꎬ是公路线路断面测量的一种全新的技术方法ꎮ1㊀车载三维激光扫描系统的测量原理1.1㊀车载三维激光扫描系统的原理车载三维激光扫描系统是将全球定位系统㊁惯性导航系统㊁三维激光扫描以及近景摄影测量等技术进行融合ꎬ集成到一台数据采集车上ꎬ实现对动态扫描和近景摄影测量成果的快速定位测量ꎮ系统主要由安装于移动车上的三维激光扫描仪㊁全球定位仪㊁惯性导航仪㊁后处理软件㊁电源等附属设备构成ꎮ数据采集时ꎬ通过激光脉冲所测量的距离ꎬ水平和垂直两个方向的角度值ꎬ来计算扫描点的空间坐标ꎮ然后对扫描点进行一系列处理ꎬ获取地面点在相应坐标系中的坐标ꎮ其扫描数学测量原理如图1所示ꎮ1.2㊀扫描数据处理车载三维激光扫描系统通过动态采集所获得的是一系列离散点的点云数据ꎬ记录了地面物体表面的空间位图1㊀车载三维激光扫描系统的测量原理Fig.1㊀Measurementprincipleofvehicle-mounted㊀㊀㊀㊀3Dlaserscanningsystem置信息和相应的物理参数ꎮ这样的点云数据由于含有非测量目标的噪声点ꎬ且点的坐标并不是最终需要的地面坐标系的坐标ꎬ因此ꎬ还不能准确地表达测量目标的真实模型ꎮ这就要求对动态扫描所采集的点云数据进行如下处理ꎮ1.2.1㊀噪声和粗差剔除车载三维激光扫描系统通过动态采集所获得的道路点云数据中ꎬ可能含有树木㊁花草㊁行人㊁车辆等非公路属性的噪声点数据ꎬ也可能含有测量时产生的粗差数据ꎮ这些噪声点数据和粗差数据对公路测量模型的建立产生干扰ꎬ需要对其进行剔除ꎮ具体措施包括粗差剔除㊁离群数据去除和去噪处理等ꎮ1.2.2㊀坐标转换如图1所示ꎬ原始点云数据中点的空间位置是以扫描仪的仪器中心为原点的扫描坐标系为基准的ꎮ而实际应用时ꎬ需要把扫描坐标系转化为地面坐标系ꎮ把扫描坐标系转换为地面坐标系的变换参数通常包括3个平移参数xT㊁yT㊁zTꎬ3个旋转参数α㊁β㊁γ和1个尺度变化参数Rꎮ由于一个项目中通常会使用同一台扫描仪进行测量ꎬ则扫描坐标系的尺度相同ꎬ故扫描坐标系到地面坐标系的转换只有6个独立的参数ꎮ转换方程为:xMyMzMéëêêêùûúúú=Rαꎬβꎬγ()XMYMZMéëêêêùûúúú+xTyTzTéëêêêùûúúú(1)应用公式(1)ꎬ通过共轭点ꎬ按间接平差的原理ꎬ列出误差方程ꎬ求出转换参数的最小二乘解ꎬ实现点云数据的内定向ꎬ进而完成点云数据从扫描坐标系到地面坐标系的转换ꎬ从而实现扫描数据的配准ꎮ1.3㊀三维建模通过噪声剔除和数据配准后ꎬ得到了由全离散的地面坐标系坐标点构成的点集合ꎬ点之间还没有建立起相互关联的信息ꎬ还不能直观表达公路断面测量所需要的三维模型ꎮ需要通过一定的处理ꎬ形成三维高程模型ꎬ即DEMꎮ通常要通过离散数据构建三角网(TIN)ꎬ再在构建好的三角网的基础上ꎬ通过一定规则生成DEMꎬ建立公路线路的数字地面模型ꎮ1.4㊀公路断面图绘制将道路中线转点坐标和里程坐标导入构建好的公路三维模型数据DEM中ꎬ建立道路中线纵断面采样线ꎮ根据道路中线纵断面采样线ꎬ在公路三维模型数据DEM的曲面模型上ꎬ结合输入的相关参数ꎬ通过软件自动生成道路纵断面的断面图ꎮ在构建好的纵断面采样线上ꎬ按设计要求ꎬ设置横断面参数ꎬ创建横断面数据采样线ꎮ根据创建好的一系列横断面采样线ꎬ由软件自动绘制每个横断面的断面图ꎮ2㊀工程项目应用实例2.1㊀项目概况该项目为哈密至敦煌S245线上长为64km㊁宽为500m1ʒ2000带状地形图测绘和沿中线间隔为20m的纵断面及沿中线两侧各宽30m的横断面测量ꎮ2.2㊀项目主要软硬件配套软硬件包括:激光扫描系统RIEGLVMZ-1000ꎻ轨迹解算软件POSPacMMS7.2ꎻ数据采集软件RRiACQUIRE-MLSꎻ数据处理软件和点云编辑软件RiPROCESS和应用软件RiScanProꎻ地形图编绘和纵横断面绘制软件CASSꎮ本次使用的采集车辆是三菱帕杰罗V73ꎮ2.3㊀项目主要的技术路线通过GPS进行三维激光扫描车辆的定位ꎬ获得扫描仪测量原点的地面坐标系的精确数据ꎬ同时ꎬ通过IMU进行车载三维激光扫描仪的偏航角㊁滚动角及高低角的测量ꎬ获得扫描仪的测量姿态ꎻ通过激光扫描的方式ꎬ对地面点进行扫描测量ꎬ获得待测地面点在扫描坐标系的点云坐标ꎻ通过去燥和解算得到ꎬ得到待测点数据在地面坐标系的点云坐标ꎮ2.3.1㊀外业数据采集操作流程1)外业扫描作业时ꎬ将扫描仪安装在车顶支架上ꎬ实施360ʎ扫描模式ꎻ外业采集点云密度设为7 9cm(距离仪器450m处的点间距)ꎬ车速设定为20km/hꎻ由卫星定位接收机GNSS对静止状态下的测量车位进行实时的绝对位置测量5minꎮ2)由惯性测量单元IMU计算卫星定位接收机(前㊁后)㊁激光扫描仪VZ1000设备的实时姿态信息ꎮ3)通过车辆的加减速㊁改变方向ꎬ在各项指标达到限差要求后ꎬ由三维激光扫描仪LS㊁GNSS㊁IMU㊁DMI(车轮解码器)对以静态基准点20km范围内的点位进行测量ꎮ4)最后基于IMU系统获得设备实时姿态信息ꎬ通过将各种数据联合解算获得空间坐标数据ꎮ2.3.2㊀内业数据处理操作(1)完整轨迹解算ꎻ(2)点云解析和轨迹数据匹配ꎻ(3)噪声消除㊁坐标系转换ꎻ(4)数据DEM建模㊁等高线处理㊁地物的提取与绘制㊁地形图编辑ꎻ(5)进行公路纵横断面测量ꎮ图2为扫描数据经过坐标系转换后的地面坐标691㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年系的点云数据ꎮ图2㊀内业数据处理后的三维激光扫描点云数据Fig.2㊀3Dlaserscanningpointclouddata㊀㊀㊀afterinternaldataprocessing2.3.3㊀项目实施中应注意的事项1)实际作业中ꎬ要在测区中先选定一定数量的基准站点ꎬ使得扫描车距离基准点不得超过20kmꎬ以确保扫描精度ꎻ2)开始扫描前扫描车要进行静态测量5minꎬ用以确定其初始位置和姿态ꎻ3)静态完成后需通过急加速㊁减速㊁转弯来激活惯导(IMU)ꎬ使其处于正常工作状态ꎻ4)开始扫描后要合理控制车速ꎬ使车速保持在20 30km/h为宜ꎻ5)扫描中如果想获得较密点云数据及较高精度ꎬ宜设置斜后45ʎ㊁斜后135ʎ㊁360ʎ将路线扫描3遍ꎮ3㊀结束语本文系统地介绍了车载三维激光扫描系统的基本原理以及在公路断面测量中的应用ꎬ并通过生产实践验证了车载三维激光扫描系统应用于公路断面测量项目的实用性和优越性ꎮ与传统的作业方式相比ꎬ此种数据采集和处理方式安全性更高ꎬ并能极大地减少外业花费的人力㊁物力ꎬ能大幅提高工作效率ꎮ参考文献:[1]㊀徐进军ꎬ张民伟.地面3维激光扫描仪:现状与发展[J].测绘通报ꎬ2007(1):47-50.[2]㊀张卡ꎬ盛叶华ꎬ叶春ꎬ等.车载三维激光数据采集系统的绝对标定及精度分析[J].武汉大学学报:信息科学版ꎬ2008ꎬ33(1):55-59.[3]㊀叶泽田ꎬ杨勇ꎬ赵文吉ꎬ等.车载GPS/IMU/LS激光成像系统外方位元素的动态标定[J].测绘学报ꎬ2011ꎬ40(3):345-350.[4]㊀聂倩ꎬ陈为民ꎬ陈长军.车载三维激光扫描系统的外参数标定研究[J].测绘通报ꎬ2013(11):74-77.[编辑:张㊀曦](上接第194页)㊀㊀图2中ꎬ 地图瓦片数据集 为交换瓦片数据的根目录(一般为交换数据的名称)ꎬ其下的目录为地图瓦片的金字塔层ꎬ金字塔层目录下以该层的行为目录ꎬ行目录下为具体的瓦片数据文件ꎮ4㊀结束语天地图 广东 矢量电子地图作为 天地图 广东 省级节点的地图服务内容ꎬ已顺利上线ꎬ并接入国家 天地图 主节点ꎬ为广东省政府各部门㊁社会公众提供权威㊁统一㊁便捷的在线地理信息服务[5]ꎮ本文以 天地图 广东 矢量电子地图为例ꎬ简要介绍了在ArcGIS平台中构建图库一体化的矢量电子地图制作技术方案ꎬ有机地将地图与建库数据一体化ꎬ科学地管理和维护数据ꎬ有效地实现了每年 天地图 广东 矢量电子地图数据的更新工作ꎮ参考文献:[1]㊀林抒旻.基于 天地图.晋江 的晋江市便民地图网的设计与实现[J].测绘与空间地理信息ꎬ2017ꎬ40(5):127-129.[2]㊀王惠媛.浅谈天地图 新疆矢量电子地图数据的制作[J].中国新技术新产品ꎬ2012(11):44.[3]㊀广东省人民政府网站.省情概貌[EB/OL].[2015-01-21].http://www.gd.gov.cn/gdgk/sqgm/201501/t20150121_208189.htm.[4]㊀丁鸽ꎬ刘开ꎬ徐彦中ꎬ等.基于ArcGIS构建图库一体化海图系统的研究[J].城市勘测ꎬ2016(4):45-49.[5]㊀陈鑫祥ꎬ吴永静ꎬ万宝林. 天地图 广东 数据建设及关键技术研究[J].地理信息世界ꎬ2013ꎬ20(4):60-64.[6]㊀刘超ꎬ孙玉鑫ꎬ郭金龙. 天地图 黑龙江 省级节点在线服务数据制作研究[J].测绘与空间地理信息ꎬ2017ꎬ40(3):152-154.[7]㊀国家测绘地理信息局.CH/Z9011-2011地理信息公共服务平台电子地图数据规范[S].北京:测绘出版社ꎬ2012.[8]㊀杨燕.基于天地图 新疆自治区节点矢量数据与国家主节点矢量数据融合技术方法探讨[J].测绘与空间地理信息ꎬ2017ꎬ40(8):126-128.[9]㊀郑海玲.基于ArcGIS的增城市政务电子地图快速制作技术研究[J].测绘与空间地理信息ꎬ2015ꎬ38(12):178-184.[10]㊀陈鑫祥ꎬ吴锦超.利用ArcGIS+Engine实现天地图瓦片数据的切割[J].北京测绘ꎬ2013(4):17-20.[编辑:刘莉鑫]791第8期王克峰等:车载三维激光扫描系统在公路断面测量中的应用。
高精度IMU车载激光测量系统在高速公路改扩建中的应用
高精度IMU车载激光测量系统在高速公路改扩建中的应用张志彬;陈才义;吴国平【摘要】针对车载移动激光测量系统的特点和高速公路改扩建数据精度的要求,本文对高精度IMU车载移动激光测量系统在高速公路改扩建中的应用进行分析,通过对车载激光测量系统中的关键器件IMU的原理和特性进行分析,阐述了车载移动激光测量系统在高速公路改扩建项目中彩色激光点云数据获取与联合解算的技术方法,并通过工程实践验证了该方法的精度.【期刊名称】《辽宁科技大学学报》【年(卷),期】2018(041)003【总页数】5页(P232-236)【关键词】高速公路改扩建;车载激光测量系统;高精度IMU;联合解算【作者】张志彬;陈才义;吴国平【作者单位】贵港市勘察测绘研究院,广西贵港 537100;贵港市勘察测绘研究院,广西贵港 537100;北京四维远见信息技术有限公司,北京 100071【正文语种】中文【中图分类】P225.2;TU196.1高速公路在改、扩建过程中,为尽可能地提高对原有道路的利用率,通常会采用单侧加宽、双侧加宽或者单双侧加宽的方案,因此需要对现有道路路面及道路两侧的地物位置及结构性质进行精确测量与调查,其测量精度要求远高于新建道路。
传统方法是采用人工野外测量,虽然在测量路段附近摆放安全警示锥筒,但是人员在道路作业仍非常危险,并且作业效率特别低。
随着技术的进步,高速公路改扩建的测量方法也呈现多种多样。
杨颖等[1]分析了使用机载Lidar设备进行高速公路改扩建数据采集处理过程。
但机载Lidar设备进行测量作业时需要申请空域,如在机场或者军用设施附近,空域窗口期根本无法被批准。
魏国忠等[2]分析了利用靶标控制点对车载激光点云数据进行高精度校正的可行性,对车载激光扫描系统的具体过程介绍的比较概略。
余飞等[3]提出一种新的利用海量高精度激光雷达数据生成设计地面线的方法,使用车载或者机载的点云数据进行设计地面线的快速自动提取,但对具体应用介绍的较少。
高速公路工程测量中LIDAR技术应用研究
Q :
工 程 技 术
Sci en ce e nd Tec h nol og y I n no vet i o n Her al d
高速 公 路 工程 测 量 中L I D A R 技术 应 用 研 究
梁敬亮 汪民主 ( 建设综合勘察研 究设计 院有 限公 司 北京
0 km。 2 L I D AR 用 于 高 速 公 路 线 路 优 化 设 计 过 6 3 . 4 实 施航 空摄 影飞 行 的模 式
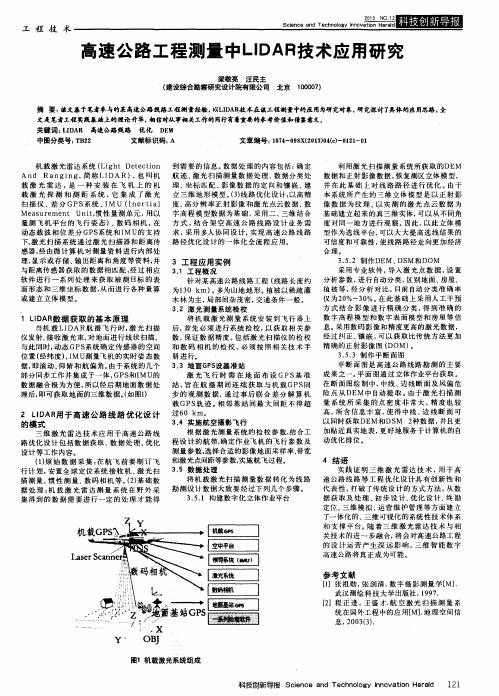
三维 激 光 雷 达 技 术 应 用 于 高 速 公 路 线 路 优 化 设 计 包 括数 据获 取 、 数据处理、 优 化 设 计 等 工作 内 容。 ( 1 ) 原始数 据采 集: 在 航 飞 前 要 制 订 飞 行计划, 安 置全 球 定 位 系统 接 收 机 、 激 光 扫 描测量、 惯性测量、 数码相机等。 ( 2 ) 基础 数 据处 理 : 机 载 激 光 雷 达 测 量 系 统 在 野 外 采 集 得 到 的 数 据 需 要 进 行一 定 的 处 理 才 能 得
到 需 要 的信 息 。 数 据 处 理 的 内容 包括 : 确 定 航 迹、 激 光 扫 描测 量 数 据 处 理 、 数 据 分 类 处 理、 坐标 匹 配 、 影 像 数 据 的 定 向 和 镶嵌 、 建 立 三维地形模型。 ( 3 ) 线 路 优化 设 计 : 以 高 精 度、 高分 辨 率正 射 影 像 和 激 光 点 云数 据 、 数 字 高 程 模 型 数 据 为基 础 , 采 用二 、 三 维 结 合 方式, 结 合 架 空 高 速 公 路 线 路 设 计 业 务 需 求, 采 用 多人 协 同 设 计 , 实 现 高 速 公路 线 路 路 径 优 化 设 计的 一 体 化全 流 程 应 用。
机载激光雷达(LiDAR)测量在公路三维测设中的应用探究
机载激光雷达(LiDAR)测量在公路三维测设中的应用探究机载激光雷达(LiDAR)测量技术融合了多种先进技术,在公路三维测设中发挥着更大的作用。
基于此,本文分析了机载激光雷达(LiDAR)测量的技术的使用优势,阐述了辅助地面控制测量、采集参数的选择、横断面的采集、DOM、DEM、DLG的制作这些机载激光雷达(LiDAR)测量技术在公路三维测设中的应用。
标签:机载激光雷达(LiDAR)测量;公路;三维测设作为一种新型的空间测量技术,机载激光雷达(LiDAR)测量技术融合了全球定位系统(GNSS)、激光扫描、摄影测量、惯性导航系统(IMU)等技术,能够更加准确的、快速的完成地表三维空间信息的收集。
可以说,机载激光雷达(LiDAR)测量技术是继GPS技术后的又一次三维测绘技术进步。
经过实践能够发现,机载激光雷达(LiDAR)测量技术能够更加高效的获取地面精密数字地面模型,在公路三维测设中发挥着重要的作用。
一、机载激光雷达(LiDAR)测量的技术分析(一)机载激光雷达(LiDAR)测量技术的使用优势分析对于机载激光雷达(LiDAR)测量技术来说,其融合的多种先进技术,在公路三维测设中有着更好的使用有优势。
机载激光雷达(LiDAR)测量技术主要有以下几种使用优势:第一,数据密度相对较高。
机载激光点云的采集间距相对较小,一般在0.8-1.2米之间。
结合实际的需求该间距可以更小。
在这样的采集条件下,数据密度显著提升,在真实地面高程模型的建立中有着极大的优势。
而在传统的DTM测量中,平均点的间距在25米左右。
可知,机载激光雷达(LiDAR)测量技术有着更高的数据密度。
第二,精确度相对较高。
对于机载激光点云数据来说,其获取都是激光测量直接完成的。
理论上,机载激光雷达(LiDAR)测量技术的高程精度可以达到0.1米;平面精度可以达到0.15米。
而在传统的航测中,理论上的高程精度为0.3-0.5米。
第三,空三定位更为先进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载激光扫描技术在公路测量中的应用
摘要:传统的公路测量工程主要采用水准仪、全站仪或RTK等测量方法联测
得到数据。
针对传统测量方法工作量大,效率低、干扰正常交通秩序等问题,采用
车载激光扫描测量系统,可快速获得路面点坐标信息及道路两侧情况。
本文结
合项目实际,阐述了车载激光扫描技术的基本原理和作业技术流程,通过在公路
测量的应用,分析了数据采集和处理中的关键技术,并通过点云数据提取获得符合
精度要求的目标点的坐标和高程。
关键词:车载;激光扫描技术;公路测量;
一、车载激光扫描技术的工作原理及特点
1.1工作原理
车载激光扫描系统是将三维激光扫描仪、导航定位系统和惯导系统联合使用,实现对动态扫描快速定位的测量系统。
其工作原理是车辆在移动过程中,GPS测量
记录扫描仪运行轨迹在世界坐标系中的实时位置;激光扫描仪则记录目标的大小、形态和距离;惯导系统则计算扫描仪的运行姿态;然后利用时间和空间上的检校信息,通过统一的地理参考和解析处理实现动态实时的获取目标点三维坐标信息的
功能。
车载激光扫描系统主要由以下几部分组成:三维激光扫描仪、GNSS天线、高
精度IMU、电子转台、里程计、线阵相机和笔记本电脑;三维激光扫描仪﹑相机和
惯导系统固定在电子转台上,里程计安装在车辆的轮胎上。
1.1.1车载激光扫描系统实现技术同步
车载多传感器同步技术是车载激光扫描技术的重中之重。
首先通过同步控制
软件将各组件开始数据采集的时间相统一;然后采集数据时以流动站卫星定位接
收机的时间为标准,GPS 向激光和惯导系统不断地发秒脉冲与此同时激光与惯导
系统向卫星定位接收机的I\O口打标,这样就能将激光和惯导系统采集到的数据
贴上世界协调时的标签,而激光发出的秒脉冲可以通过电子转台和线阵相机的控制及来实现时间上的同步。
1.1.2 GPS和 IMU相辅相成
GPS可以提供非常准确的位置,有着较高的稳定性。
虽然利用GPS 差分定位技术可以得到厘米级的精度,但由于大型的构建筑物的遮挡或多路径效应,经常会遇到一直处于浮动状态、定位精度差的情况。
惯导系统却具备在不良环境中能够实现平稳输出的优点,其有较高的稳定性,缺点是伴随着时间积累,导航精度下降。
1.1.3点云数据的匹配融合
惯导系统不但可以提供三维激光扫描系统的姿态信息,还可以提供较为精确的定位信息,从而求出各个扫描点的偏移坐标,再将偏移坐标和扫描车的瞬时大地坐标两两相加,就可以获取扫描点在大地坐标下的坐标值了。
在扫描时刻扫描点的单点坐标,按照扫描点的空间姿态﹐去跟扫描仪获取的距离参数和角度参数进行匹配,就可以推算得到激光点云数据,而且将融合后的三维激光点云数据和线阵相机所获取的物体的纹理数据再一次进行融合,就能得到真彩色的激光点云数据。
1.2车载激光扫描技术的特点
(1)高精度。
能够提供高达6cm的测量精度﹔
(2)高效率。
可快速大量采集空间点信息,可风雨无阻地作业,项目时间大幅缩减;
(3)低强度。
人员仅需要操作笔记本电脑,避免日晒雨淋,大量外业工作转至内业;
(4)数据获取自动化。
车载激光扫描系统各传感器相辅相成,再加上成熟配套软件,获取数据安全可靠,自动化程度高;
(5)数据获取可视化。
获取的点云数据可以全面地反映地形或地貌的表面特征,更加准确、直观,一目了然。
二、公路测量中车载激光扫描技术的应用
2.1项目背景
以某县2条地形地貌和长度基本相同的县级道路为例,分析车载激光扫描测
量系统在海拔较高的复杂地形中作业的效率和精度指标。
道路X1的长度约150km,道路X2的长度约为147.6km。
使用传统测量技术测量道路X1,使用新型车载激
光扫描技术测量道路X2,以利于研究车载激光扫描技术应用于道路测量的作业流
程和关键技术,并对比分析车载激光扫描技术相较传统作业方式的优势和不足。
2.2 实验过程
2020年9月进场,确定勘测试验场地,并布设首级GPS控制网和四等水准网,在测区范围内共布设了15个首级控制点,230个点作为一级加密GPS控制点,在
点位选择上主要考虑点位分布合理,密度均匀,而且便于直接使用。
X2线GPS控
制网中联测了X1线独立坐标系下的D级GPS点3个( G505,G506,G507 )。
沿线
路平均15 km布设一对首级控制点,同步观测时间180 min,以便将GPS定位结
果转换至地面坐标系时作为起算数据,控制测量从X1线G505,G506,G507为起点,沿 DK,CK,BK,AK,LK段的线路顺序。
X1线路采用全野外数字测绘成图方法,利用GPS-RTK进行图根控制测量和碎部点采集,经外业采集、补测、检测,
采用南方CASS9.1软件,进行内业编辑成图。
为保证扫描数据的精度,将X2线
路项目工程分为AK段50.422 km,BK段33.58 km,CK段6.553 km ,DK段
23.618 km,LK段12.541 km,进行分段扫描测量。
由于每个工点只扫描了1次,且各工点之间互相独立,因此不存在点云块之间的匹配连接问题。
2.3 测区交通条件
测量区域为高原地区,平均海拔达到4 700m,最高处海拔达到5 000m以上,施工区域的空气非常稀薄,地势落差起伏大,气候瞬息万变,交通条件比较差,
野外作业施工人员会出现缺氧或者冻伤的情况。
最终决定使用新型车载激光扫描
技术和无人机测绘技术,显著提升施工的工作效率并减少野外作业的工作量,保
证测量工作在规定的时间内完成。
2.4 基准站布设
作业区未收集到国家级、省级控制点和水准点,无法利用已有的测量控制点
作为起算点,采用多台GPS静态同步观测的方法,埋设首级控制点,并在X1、X2线
路建立相对独立坐标系,坐标系采用与GPS同步的WGS84坐标系,3°带,中央
子午线为92° 30’00o" ,投影面为4 700 m测区平均高程面,以保证数据成果
精度。
2.5处理扫描盲区
在激光测量中,难点之一是存在测量死角,将激光扫描仪设置于移动车辆中,因为扫描仪安装位置、车辆高度等因素,激光扫描仪的视角可能会被遮挡一部分,由此产生了扫描盲区。
此外,由于道路沿线存在桥梁、广告牌以及护栏等,这些
构筑物也会挡住部分视角,造成激光扫描盲区,进而出现点云空洞。
为保证扫描
数据的完整性,在作业时抬高车顶底座和激光扫描仪安装高度,增设激光扫描探
头2个,沿着道路双向反复扫描,并使用GPS-RTK对采集漏洞区域予以弥补,使
道路两侧地形图测绘结果更加完整。
2.6车载激光扫描数据的处理
车载激光测量系统具有测量速度快、精度高等优点,但也存在非连续覆盖和
数据量巨大等缺点,扫描的激光点云数据具有冗余性主要表现在:一是含有较多
的重复数据;二是含有较多的多余数据;三是点云数据因受到环境等因素的影响而
出现噪声点,产生不属于扫描目标本身的冗余数据。
2.7 实验结果
(1)利用新型车载激光扫描技术,获取道路的中桩、断面测量及带状地形
图测绘成果,经过实测控制测量点坐标与点云坐标比较检查,一共测量了200个
控制点,平均中误差0.039 m,高程平均误差0.31 m。
在1∶1 000地形图精度
检查中,地物点相对于邻近图根点的点位中误差为±4.7 cm,邻近地物点间距中
误差为±6.7 cm,高程注记点相对于邻近图根点的高程中误差为±5.8 cm。
结果
表明本次测量数据误差均在规范要求范围内,将激光扫描测绘技术应用于1: 1 000带状道路测绘采集的数据与传统GPS-RTK、全站仪一样是精确可靠的。
(2)依据实验设计的评价指标,车载激光扫描在人员投入、人员设备安全、成本投入、作业效率等方法面具有较大的优势,但是目前存在仪器成本较高、后
期数据处理工作量较大、电脑配置要求较高、存在扫描盲区、扫描精度受基站范
围约束等缺点,总体上表明,将车载激光扫描技术应用于公路测量在成本控制和
效率上优势将日趋明显。
结束语
车载激光扫描技术由于克服了传统测量技术的局限性,具有效率高、低成本、测量精度稳定等特点;随着测绘新技术的不断推进,车载激光扫描技术作为一种先
进的数据获取手段,凭借实用性强、精确度高、数据采样率高等优势在公路测量
领域显现出极大的技术优势,也必将拥有更广阔的市场前景。
参考文献
[1]张迪,钟若飞,李广伟,赵坤.车载激光扫描系统的三维数据获取及应用[J].地理空间信息,2012,10(1):20-24.
[2]朱召锋.车载激光扫描技术在公路扩改建测绘中的应用[J].北京测
绘,2019,33(11):1348-1351.
[3]梅文胜,周燕芳﹐周俊.基于地面三维激光扫描的精细地形测绘[J].测绘
通报,2010(1):53-56.。