车载移动测量三维模型生产技术规程
国产一体化移动三维测量系统-中海达

系统应用
HiScan-C 系统可广泛应用于互联网街景地图,带状地测绘、三维数字/智慧城市、数字城管,数字公安、智 慧交通、数字航道、数字矿山及海岛礁测绘等应用领域。
互联网街景地图
HiScan-C一体化移动测量系统,可以采集整个城市的高 清全景照片与相应采集点坐标信息,并为客户提供整体的 xplore天地图等各类地图服务 平台无缝对接,构建出整体城市的三维实景,促进城市的 智慧化发展。
海达三维实景应用平台(HD MapCloud RealVision)
海达三维实景应用平台可在互联网上实现流畅便捷的全景浏览、基于全景和点云数据的 标注和测量、支持路名路口导向标注、支持鼠标探面效果,提供基于鼠标探面的街景定 位---跳--转--体--验---等--功--能---,--并--提---供--了--F--le--x-、--J-a-v-a--S-c-r-i-p-t-二--次---开--发--接---口--。------------------------------
HiScan-C SU2
总体指标
型号*
扫描仪数量 测程
最大激光频率 扫描角分辨率
扫描角度 全景分辨率 系统测量精度
扫描频率 重量
*可根据用户需求定制
HiScan-C SU1
1个 最远650m@90%反射率
最大50万点/秒 0.001° 360°
7500万像素 5cm
200Hz 15kg
Features
智慧交通应用
HiScan-C一体化移动测量系统可提供从交通基础设施数据采集、生产、建库到综合应用管理平台服务的全流程一体化数字交通解决方 案,可广泛应用于交通行业管理信息化、道路设计改扩建、拆改移、桥梁及道路竣工验收、数字海域/航道可视化监管等方面,为交通现 代化日常维护、管理、应急决策、公众服务提供数据支持。
车载移动测量系统标定场的建设和精度评定
关键词 :车载移动测量系统 ;系统标定场 ;绝对精度评定 ;相对精度评定 ;
中图分类号 :TG146.2
文献标识码 :A
文章编号 :11-5004(2019)06-0124-3
车载移动测量系统是一种兼具定位、测距、测角和摄影功能 的自动化、数字化的系统,集成了 GNSS、惯性测量单元(IMU)、 激光扫描仪、数字相机以及自动控制等设备,以实现对目标区域 的空间数据、属性数据以及实景影像等多种信息的快速采集 [1]。 车载移动测量与传统的测绘地理信息获取方式相比,具有成本 低、速度快、精度高、实时性强等显著特点。近年来,车载移动 测量技术己经成为道路测量、街景地图数据获取、城市三维建模 等领域的主要技术手段之一,是对大比例尺测图、航空摄影测量 和卫星摄影测量的有力补充 [2,3]。
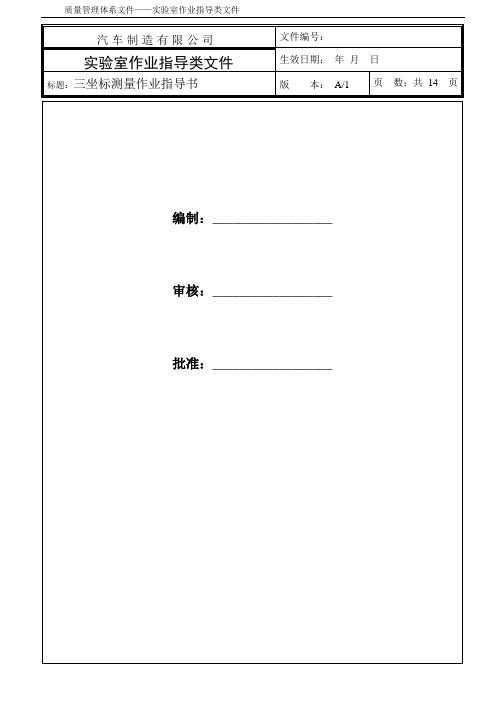
系统标定场的建立遵循以下原则 : (1)系统标定场应当建立在房屋有规则房屋角点、窗户角点 的区域,保证在点云中能够高精度的提取这些特征点 ; (2)保证控制点数量多、分布合理有一定的高程层次,特征 显著和方便提取 ; (3)选在空旷、GPS 信号良好的区域,以保证 POS 数据的 精度 ; 系统标定场的已知特征控制点 WGS84 坐标通过 RTK(徕卡 GS14)控制测量和全站仪(徕卡 TM50)测量方式进行。存在两 个互相通视控制点的情况下,可通过全站仪直接测量多次求取 平均值得出各个特征控制点的 WSG84 坐标 ;在没有两个互相通 视的控制点的情况下,需要首先采用静态 GPS 测量方式获得至 少两个高精度控制点,然后通过全站仪测量多次求取平均值获 取各个标定控制点的大地坐标。已建设完成的省安科院车载移 动测量系统标定场如下图 2 所示,由 44 个 RTK 控制点和 157 个 全站仪测量点组成,南北长约 1km,东西长约 1.4km,有垂直和 闭合的基线,控制网点分布均匀合理,点位精度优于 2cm。
汽车制造三坐标作业指导书
9.3测量机系统关闭1.关闭系统时,首先将Z轴运动到安全的位置和高度,避免造成意外碰撞。
2.退出PC-DMIS软件,关闭控制系统电源和测座控制器电源。
3.关闭计算器电源,UPS,关闭电源开关。
10 测头的校验10.1校验是为了确认各个测头的相关位置、测头球直径以及弹性角度。
10.2校验原理:在标准球(目前使用直径=15.8758的标准球)表面测量点,并尽量均匀分布所测的点。
测头球半径Sphere radius=(中心球半径radius of sphere centers-标准球半径radius of calibration sphere)10.3校验步骤在测量新零件时,进入测量软件后,软件会自动弹出测头功能的窗口。
也可以在插入--硬件定义--测头菜单中选择进入测头功能窗口。
在进行测头定义前,首先要按照测量规划配置测头、测针,并规划好测座的所有使用角度。
然后按照实际配置定义测头系统。
10.4 添加测量角度如需要添加测头角度,在测头功能窗口中点击添加角的按键,即出现添加新角的窗口。
10.5 测头校验测头定义后,要在标准球上进行直径和位置的校验。
点击测头功能--测量,弹出测头校验窗口。
输入测头校验的点数和速度。
测头点数:校验时测量标准球的采点数,缺省设置为5点,推荐为9—12点。
逼近/回退距离:测头接触或回退时速度转换点的位置,可以根据情况设置,一般为2—5mm。
移动速度:测量时位置间运动速度。
触测速度:测头接触标准球时速度。
控制方式:一般采用DCC方式。
操作类型:选择校验测尖。
10.6 观查校验结果测头校验后,点击测头功能--结果键,会弹出校验结果窗口。
在校验结果窗口中,理论值是在测头定义时输入的值,测定值是校验后得出的校验结果。
"StdDev"是本次校验的形状误差,从某种意义上反映了校验的精度,这个误差应越小越好。
11 参考系(坐标系)的创建参考系(也称为坐标系)可用于自动移动测量机、分析结果和定义元素。
车载移动测量三维模型生产技术规程

车载移动测量三维模型生产技术规程【序号】车载移动测量三维模型生产技术规程【引言】车载移动测量技术是一项集先进测量仪器、传感器、数据处理和建模等技术于一体的测绘技术。
它可以实时采集车辆行驶过程中的环境信息,并利用这些数据生成精确的三维模型,为城市规划、交通管理、导航系统等领域提供重要的数据支持。
本文将从测量原理、数据收集、处理与建模、技术规程等方面,深入探讨车载移动测量三维模型生产技术。
【1. 测量原理】车载移动测量技术主要依靠惯性测量单元(IMU)、全球卫星定位系统(GNSS)和激光扫描仪等测量设备,通过定位车辆运动轨迹和采集周围环境的点云数据,以实现对地理信息的快速采集。
IMU测量车辆的加速度和角速度,GNSS确定移动平台的位置和姿态,激光扫描仪获取周围环境的距离信息。
综合使用这些数据进行精确测量和建模。
【2. 数据收集】车载移动测量系统通过搭载在车辆上的测量设备,实时采集车辆行驶过程中的定位数据和环境点云数据。
定位数据通过GNSS和IMU进行融合,提供车辆在空间中的位置和姿态,同时记录车辆在不同时间和位置的运动轨迹。
激光扫描仪通过快速、连续的扫描,获取车辆周围环境物体的精确距离信息,并生成点云数据。
【3. 数据处理与建模】车载移动测量系统采集到的海量数据需要经过一系列的处理和建模步骤,以生成高质量的三维模型。
数据处理包括数据配准、滤波、配准精度评定等,旨在提高数据的准确性和一致性。
数据建模则通过点云处理、三维配准和表面重建等算法,实现对环境中物体的三维模型生成。
为了提高模型的精确性和完整性,需要考虑光照调整、去噪、纹理映射等后处理步骤。
【4. 技术规程】车载移动测量三维模型的生产涉及到数据采集、传感器配置、数据处理和建模等多个环节,因此需要建立技术规程来指导操作和保证数据质量。
技术规程应包括但不限于以下内容:- 数据采集:确定数据采集时车辆行驶速度、采样频率、扫描参数等关键参数要求,保证数据采集的准确性和一致性。
白车身三坐标检测操作规程20110526
白车身三坐标检测操作规程编号:编制:审核:批准:日期:白车身三坐标检测操作规程一、适用范围:本操作规范适用于EQ2050系列越野车白车身骨骼精度的检测二、测量机型号:ROMRER Sigma2030测量软件版本:μ-Log XG V1.01三、详细做作步骤:1、三坐标测量机的安装1-1、将测量机底座吸到平台上1-2、组装平衡杆1-3、将已组装的平衡杆和测头(6mm测头)装到测量机上1-4、将组装好的测量机固定到底座上,如图一。
1-5、用相应的连线将交流净化稳压电源、测量机、电脑、信号转换盒正确连接,如图2。
1-6、启动电脑,打开信号转换盒开关,将”加密狗”插入电脑USB接口,依次打开GDS 控制软件和μ-Log软件,如图3根据提示将测量机复位,如图4。
然后选择相应的测头。
如图5。
图32、精度验证2-1、任选一量块并固定牢靠2-2、选择量块一个端面测量其平面PLN1(按“F8”,至少测量此端面上4个点),点“继续”,在量块另一个端面测量一个点PNT1(按“F3”),点“继续”,按“F12”,查看所测量块的长度(按“F5”,参考方向选择所测得平面PLN1)。
2-3、查看所测得量块长度与量块标定值的差值是否在测量机精度范围内(±0.054mm) 1)、若超出测量机精度范围:1、换姿势重复测量直至排除人为测量因素影响。
2、检查各连线接口是否牢固可靠,必要时重新插拔接头。
如图63、若1、2步骤仍无法验证测量机精度,应及时上报质量部相关人员。
2)、若在测量精度范围内,即可建立坐标系。
3、建立坐标系选择测量球选项(按“F9”),测量平台上的基准球6(每个球至少选择表面上8个点进行测量)如图6,点“继续”;然后依次测量基准球7、基准球8。
再输入他们的基准值,如图8所示。
图8在菜单栏点“参考系”,选择“在三个中心点”选项,用基准球6、基准球7、基准球8建立坐标系。
4、白车身落入检测平台将准备好的拆掉车门和后背门的白车身落到测量平台上。
SSW车载激光建模测量系统

每组包含若干类,例如杆组包含9个类, 为节省篇幅,其它组不一一列举
序号 组别 包含的类名 路栏栅 挡车柱 挡光板 类码 440100 440200 440300 对应的文件名 路栏栅-440100 挡车柱-440200 挡光板-440300 建模方式 矢量 符号 铺设
路灯(杆+灯)
电杆 5 杆组 树干 行道树树干 树整体 其它栅栏:不含路栏 栅的栏栅(包含公交站 栏栅、树栏栅、单位 围墙栏栅、水边栏栅、 立交桥匝道和盘桥栏 栅,空调栏栅不表现)
1 建筑物
①建筑物的框架模型;②树叶(植物组) ①挡音墙;②金属隔离带;③水泥隔离带;④篱笆 树;⑤路肩;⑥混合隔离带(铁杆+水泥墩);⑦ 电线
2 3
4 5
沿路组
为TQTQ服务的路边线矢量
地路面 杆组
①地面;②路面 ①树干;②电杆;③路灯;④挡车柱;⑤*光板; ⑥路栅栏;⑦路栅栏以外的其它栅栏
6
7 8
rx7
rx8 rx9 rx10 rx11 rx12 rx13 rx14
428966.59
428966.222 428965.494 428965.889 428963.403 428963.007 428962.251 428962.645
4415744.548
4415744.79 4415752.167 4415751.941 4415746.444 4415746.667 4415754.073 4415753.849
mh 按公式:
vv 计算得到高程测量中误差为: n
mh=±0.014m
2. 在GPS信号正常地带进行绝对坐标高台转扫,可以达到3cm
行政区名称:冶陶镇
序号 1 2 3 4 5 6 7 8 9 10 11 点号 1--2 1--1 1--10 1--4 1--7 1--8 2--4 2--7 2--10 3--1 3--2
三维坐标操作规程(3篇)
第1篇一、前言三维坐标测量技术是一种高精度的测量方法,广泛应用于机械制造、航空航天、汽车制造等领域。
为了确保三维坐标测量仪器的正常使用和测量数据的准确性,特制定本操作规程。
二、适用范围本规程适用于所有使用三维坐标测量仪器的操作人员。
三、操作规程1. 工作前准备(1)检查仪器:确保三维坐标测量仪器处于正常工作状态,检查各部件是否完好,电源、气源等是否正常。
(2)检查环境:确保工作环境符合仪器要求,如温度、湿度、振动等。
(3)检查工件:确保工件表面无油污、灰尘等杂质,以免影响测量精度。
2. 启动仪器(1)打开仪器电源,等待仪器自检完成。
(2)连接计算机,打开三维坐标测量软件。
(3)检查仪器与计算机连接是否正常,确保数据传输稳定。
3. 测量准备(1)设置测量参数:根据测量需求,设置测量参数,如测量范围、测量速度、测量精度等。
(2)安装测头:根据测量要求,选择合适的测头,并将其安装到仪器上。
(3)测量规划:根据工件形状和尺寸,制定合理的测量路径,确保测量数据全面、准确。
4. 测量过程(1)放置工件:将工件放置在测量平台上,确保工件固定牢靠。
(2)测量:启动测量程序,按照测量路径进行测量。
(3)观察测量数据:在测量过程中,实时观察测量数据,确保测量数据稳定、准确。
5. 测量结束(1)停止测量:测量完成后,关闭测量程序,断开仪器与计算机连接。
(2)卸下测头:将测头从仪器上卸下,并进行清洁保养。
(3)整理工件:将工件从测量平台上取下,并进行清洁保养。
6. 日常维护(1)定期检查仪器:检查仪器各部件是否完好,如发现异常,及时报修。
(2)清洁保养:定期清洁仪器各部件,如导轨、测头等,确保仪器清洁、干燥。
(3)环境控制:保持工作环境整洁、干净,避免灰尘、油污等杂质进入仪器。
四、安全注意事项1. 操作人员应经过专业培训,熟悉仪器操作规程和安全操作规程。
2. 操作过程中,严禁操作人员将头部、手等部位置于仪器运行范围内。
《车载移动测量实景三维数据规范》编制说明 - 江西标准化

《车载移动测量实景三维数据规范》地方标准编制说明一、任务来源2013年由江西省测绘地理信息局下达的赣测发【2013】44号文《省级平台相关标准制订》,批准《三维实景数据规范》地方标准的制定。
2014年12月8日,省测绘地理信息局总工办组织专家对信息中心提交的标准进行了咨询讨论会,会后专家组提出建议,结合标准的实际情况将《三维实景数据规范》地方标准的制定变更为《车载移动测量实景三维数据规范》地方标准的制定。
二、编制原则依据我省车载移动测量实景三维数据的具体情况,本次标准的编制主要遵循以下原则:1、科学性落实科学发展观,促进地理信息产业可持续发展。
根据新版《测绘资质分级标准》的要求,地面移动测量(主要指的是车载移动测量)被纳入到地理信息系统工程专业标准里。
因此在结合已有地理信息数据相关规范的前提下,立足实际数据情况,制定车载移动测量实景三维数据规范。
2、地方性目前涉及到车载移动测量规范主要有国家测绘地理信息局发布的《可量测实景影像》(CH/Z 1002-2009),但该标准规范只是针对车载移动测量其中一种数据形式——可量测实景影像,而对于车载移动测量的其他数据形式目前国家没有标准进行规范。
因此,本规范的制定是为了满足我省车载移动测量实景三维数据实际生产需要。
3、统一性根据基础地理信息数据对实景三维数据成果的要求,以各种车载移动测量系统为数据源,明确各类数据形式在生产的各个阶段需要满足的技术要求,以确保最终的成果数据满足底层支持、服务发布、行业应用等多方面要求。
4、规范性标准的制定工作按国家标准《标准化工作导则》GB/T1.1-2009的要求进行,并符合《国家标准编写模板》的电子文本要求。
三、编制背景及意义近年来,车载移动测量技术的蓬勃发展使得数据获取的手段发生了很大的变化,人们可以更快、更方便、更准确地获取街道等信息密集地区的空间信息。
车载移动测量实景三维数据之一的城市街景与电子地图相结合,提供一个直观的平台展示二维空间位置上的三维现实场景,让人足不出户就达到身临其境的感觉,目前已经广泛应用于城市交通、旅游、娱乐、文化等各个行业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载移动测量三维模型生产技术规程
车载移动测量三维模型生产技术规程是指利用车载移动测量系统对道
路等交通设施进行三维模型的测量与生产的技术规程。
该技术规程的
实施可以提高道路施工、维护和管理的效率,减少对交通的影响,增
加交通安全性。
以下是该技术规程的相关要点。
一、技术规范
1.测量设备应当符合国家标准,测量精度应当符合三级精度标准。
2.测量时应当保证安全性和操作规范,防止误操作导致的安全事故发生。
3.测量数据应当进行校核并保存备份,以防数据损失或丢失。
测量数据应当使用合法软件处理,并进行数据加密,保护信息安全。
二、测量方法
1.测量前,应当仔细规划测量范围和时间,并进行现场勘察,确定测量范围后进行车辆设备的安装和校准,确保测量设备的质量。
2.在实施车载移动测量前,应当排除环境噪声、温度、光照度等外部影
响因素,给予测量设备充分准备时间,充分保证测量精度。
3.测量时间应当充分利用,避免在交通高峰期测量,并应当掌握交通和环境变化的情况。
同时,为保障行车安全,测量车辆速度应当不超过规定的限速范围。
三、数据处理
1.测量数据应当进行校验和质控,进行数据清洗、编辑和闭合处理,并选择合适的处理算法进行处理,保证数据的准确性和可靠性。
2.在测量数据处理过程中,应当采用多视角处理,增加测量精度。
如果处理过程中出现缺失或不合理的现象,应当及时进行补充或更正,并进行后续处理。
四、结果展示
1.三维模型生成结果应当满足规定的精度标准,并进行数据加密,确保结果的保密性。
2.三维模型生成结果应当具有可视化和交互性,以方便管理和使用。
同时应当具有规范化的数据格式和标准化的接口,能够轻松集成到其他支持的软件中。
总之,车载移动测量三维模型生产技术规程是对道路等交通设施进行三维模型测量和生产的一个重要技术规范。
它有助于提高道路施工、维护和管理的效率,减少对交通的影响,增加交通安全性。
该技术规程的要点包括技术规范、测量方法、数据处理和结果展示等方面,需要执行标准化的流程,确保测量过程的准确性和可靠性。