FX5800计算器公路全线坐标正、反算计算程序
5800曲线道路全线坐标正反算(已验证)

CASIO fx-5800P线元法坐标正反算程序V2.0说明:本程序适用于卡西欧计算器 CASIO fx-5800P,可对全线贯通坐标正反算、竖曲线高程计算。
该程序可计算任意线型,包含(直线、圆曲线、缓和曲线、卵形曲线)等,还可以能通过坐标反推该点里程和距中线距离,适用测量员专用。
主程序名:ABCYT第1步Deg:Fix 3:10→DimZ第2步Lbl 3:"1.DK=>XY":"2.XY=>DK":"Q"?W:"K0+"?S:Prog"ABCYTSJ":If P=0:Then 10^(45)→P:IfEnd:If R=0:Then 10^(45)→R:IfEnd第3步1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:If W=1:Then Goto 1:Else Goto2:IfEnd第4步Lbl 1:"E"?Z90=N:Abs(S-O)→W:Prog "ABCYTZ"第5步Cls:"F=":Locate 3,1,F°:"X=":Locate 3,2,X:"Y=":Locate 3,3,Y◢第6步Prog"ABCYTSQX":Cls:"H=":Locate 3,1,H◢第7步1→W:90→N:Goto 3第8步Lbl 2:?X:?Y:X→I:Y→J:Prog"ABCYTF":O+W→S第9步Cls:"K=":Locate 3,1,S:"E=":Locate 3,2,Z◢第10步2→W:Goto 3正算子程序名:ABCYTZ第1步0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L第2步1-L→F:1-K→M第3步U+W×(A×cos(G+Q×E×K×W×(C+K×W×D))+B×cos(G+Q×E×L×W×(C+L×W×D))+B×cos(G+Q×E×F×W×(C+F×W×D))+A×cos(G+Q×E×M×W×(C+M×W×D)))→X第4步V+W×(A×sin(G+Q×E×K×W×(C+K×W×D))+B×sin(G+Q×E×L×W×(C+L×W×D))+B×sin(G+Q×E×F×W×(C+F×W×D))+A×sin(G+Q×E×M×W×(C+M×W×D)))→Y第5步G+Q×E×W×(C+W×D)→F:F+ N→Z[1]第6步X+Z×cos(Z[1])→X:Y+Z×sin(Z[1])→Y反算子程序名:ABCYTF第1步Lbl 2:(S-O)→W:0→Z:Prog "ABCYTZ":F-90→Z[9]:(J-Y)×cos(Z[9])-(I-X)×sin(Z[9])→Z[10]第2步If Abs(Z[10])>0.001:Then S+Z[10]→S:Goto 2:Else Goto 1:IfEnd第3步Lbl 1:(Y-J)÷sin(Z[9])→Z数据库名:ABCYTSJ第1步Goto1第2步Lbl 1:If S<7586.707 Or S>13346.96:Then Cls:Locate 2,2,"PQX":Locate 4,3,"CHAOXIAN":Locate 10,4,"→Stop"◢第3步Stop:IfEnd第4步Lbl 1:IF S<7946.707:Then 98°56′56″→G:7586.707→o:3378605.445→U:453648.704→V:0→P:4500→R:360→H:1→Q:Return:IfEnd第5步Lbl 1:IF S<11766.03:Then 101°14′26″→G:7946.707→o:3378544.714→U:454003.518→V:4500→P:4500→R:3819.323→H:1→Q:Return:IfEnd第6步Lbl 1:IF S<12126.03:Then 149°52′11″→G:11766.03→o:3376389.890→U:457018.324→V:4500→P:0→R:360→H:1→Q:Return:IfEnd第7步Lbl 1:IF S<13346.96:Then 152°09′41.68″→G:12126.03→o:3376073.846→U:457190.654→V:0→P:0→R:1220.93→H:0→Q:Return:IfEnd第n步……………………………………………………数据输入说明:第1步Goto1第2步Lbl 1:If S<本条线路起点里程S>本条线路止点里程Cls:Locate 2,2,"PQX":Locate 4,3,"CHAOXIAN":Locate 10,4,"→Stop"◢第3步Stop:IfEnd第4步Lbl 1:If S<本线元止点里程:Then线元起点切线方位角→G:线元起点桩号→O:线元起点坐标X→U:线元起点坐标Y→V:线元起点半径(直线为0、曲线为半径)→P:线元止点半径(直线为0、曲线为半径)→R:线元长度→H:线元转向(左转为-1、右转为1、直线为0)→Q:Return:IfEnd第n步Lbl 1:每增加一行则为增加一个线元要素。
公路工程坐标正反算原理及5800计算器程序
0年11月14日目录一、坐标正算基本公式...............................................................02 二、坐标反算原理...............................................................04 三、高程数据库录入变换.........................................................05 四、计算器程序...............................................................07 01、ZBZS(坐标正算)...............................................................07 02、ZBFS (坐标反算)...............................................................08 03、GCJF(高程积分)...............................................................09 04、PJFY (坡脚放样)...............................................................10 05、JFCX (积分程序)...............................................................11 06、ZBFY (坐标放样)...............................................................11 07、DT (递推)...............................................................12 08、HP (横坡)...............................................................13 09、LK (路宽)...............................................................14 10、SJK1(平面数据库)......................................................14 11、SJK2(纵面数据库)......................................................14 12、SJK3(左路宽度数据库)......................................................15 13、SJK4(右路宽度数据库)......................................................15 14、SJK5(横坡数据库) (16)15、SJK6(下边坡数据库)......................................................16 16、SJK7(左上边坡数据库)......................................................17 17、SJK8(右上边坡数据库)......................................................18 五、后记 (19)0年11月14日CASIO 5800计算器公路工程测量程序一、正算所涉及的计算公式XR id XαβBd Yd ld βI图表 1在图1中,A 点为回旋曲线起点,B 点为回旋曲线止点,I 点为所求坐标点。
卡西欧fx-5800 坐标正算程序

卡西欧fx-5800 坐标正算程序“SO”算方位Lbl 0“D”:Pol(X-A,Y-B) →D◢If J≥0:Then J◢Else “J”:J+360◢IfEnd“ZZ”正算直线坐标A+Rec(Abs(P-K),Q) →XB+J→Y“X”:X+Rec(D,Q+N×90) →X◢“Y”:Y+J→Y◢P?所求桩号 A,B:起点x,y K:起点桩号 Q:方位角D:边桩距离 N?左偏“-1”右偏:“+1”X= Y= 所求点坐标“YY”正算圆曲线坐标Q+C×(P-K)÷S×180÷∏→Z“X”:A+C×S×(Sin(Z)-Sin(Q))+Rec(D,Z+N×90) →X◢“Y”:B-C×S×(Cos(Z)-Cos(Q))+J→Y◢P:所求点桩号 A,B:起点x,y K:起点桩号Q:方位角 S:曲线半径 D?边桩距离N?左偏“-1”,右偏“+1”X= y= 所算点坐标 C:线路左转“-1”右转“+1”“H1”正算缓和曲线坐标Abs(P-K) →LT2÷L→HL2×180÷∏÷2÷T2→VQ+C×V→ZL-L∧(3)÷40÷H2+L∧(5)÷3456÷H∧(4)-L∧(7)÷H∧(6)÷599040→EL2÷6÷H- L∧(4)÷336÷H∧(3)+ L∧(6)÷42240÷H∧(5)- L∧(8)÷H∧(7)÷(6×1612800)→FIf C<0:Then-F→F:IfEndA+E×Cos(Q)-F×Sin(Q) →X“X”:X+Rec(D,Z+M×N×90) →X◢B+E×Sin(Q)+F×Cos(Q) →Y“Y”:Y+J◢P?所求点桩号 A,B:起点x,y K:起算点里程桩号Q:前切线方位角 T(是圆曲线要素的A1)=√(根号)缓曲总长×半径C=切线线路方向左转“-1”,右转“+1“M=第一缓曲“+1”,第二缓曲”-1“N:算边桩左偏“-1”,右偏“+1”D:边桩距离坐标正算数据库例子“肇兴隧道右线数据库”Lbl 0“P”?P:“N”?N:“D”?DIf P≥16836.5 And P≤17009.624:Then 66881.803→A:14635.782→B:16836.5→K:280032030.50→Q:902.044→T:1→C: 1→M:Prog“H1”:IfEnd (第一缓曲线)If P≥17009.624 And P≤17529.681:Then 66914.52→A:14465.781→B:17009.624→K:281035049.370→Q:4700→S:Prog“YY”:IfEnd (圆曲线)If P≥17539.681 And 17702.805≥P:Then 67102.343→A:13799.117→B:17702.805→K:108059031.50→Q:902.044→T:-1→C: -1→M:Prog“H1”:IfEnd (第二缓曲线)If P≥17702.805 And P≤19550:Then 67102.343→A:13799.17→B:17702.805→K:288059031.50→Q: Prog“ZZ”:IfEnd (直线)。
5800公路全线坐标正反算程序

FX-5800公路全线坐标正反算程序1. 主程序(ZBJS)Lbl 4:"1.SZ => XY":"2.XY => SZ":?N:?S:Prog“SUB0”↙1÷P→C:(P-R)÷(2HPR) →D:180÷π→E:N=1 => Goto1:Goto2↙Lbl 1:? Z:Abs(S-O) →W:Prog "SUB1":F-90→F:Cls↙"XS=":Locate 4,1,X:"YS=":Locate 4,2,Y:“FS=”:F▲DMS◢Goto 4↙Lbl 2:?X:?Y:X→I:Y→J:Prog“SUB2”:O+W→S:Cls ↙“S=”:Locate 4,1,S:“Z=”:Locate 4,2,Z◢Goto 42. 正算子程序(SUB1)0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+L WD))+Bcos(G+ QEFW(C+FWD))+Acos(G+QEMW(C+MWD))) →X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+ QEFW(C+FWD))+Asin(G+QEMW(C+MWD))) →Y:G+QEW(C+WD)+90→F:X+Zcos(F)→X:Y+Zsin(F)→Y 2. 反算子程序(SUB2)G-90→T:Abs((Y-V)cos(T)-(X-U)sin(T) ) →W:0→Z:Lbl 0:Prog "SUB1":T+QEW(C+WD) →L:(J-Y)cos(L)-(I-X)sin(L)→Z:If Abs(Z)<1*10-6:Then Goto 1:Else W+Z→W:Goto0:IfEnd ↙Lbl 1:0→Z:Prog“SUB1”:(J-Y) ÷sin(F) →ZSUB0 数据库子程序Goto1↙同时保存多个曲线时的指针Lbl 1:IF S<***(线元终点里程):Then***→G(线元起点方位角):***→O(线元起点里程):***→U(线元起点X):***→V(线元起点Y):***→P(线元起点曲率半径):***→R(线元终点曲率半径):***→H(线元起点至终点长度):0或1、-1→Q(线元转角,左转为负,右转为正,直线为0):Return:IfEnd↙IF S<***(线元终点里程):Then***→G(线元起点方位角):***→O(线元起点里程):***→U(线元起点X):***→V(线元起点Y):***→P(线元起点曲率半径):***→R(线元终点曲率半径):***→H(线元起点至终点长度):0或1、-1→Q(线元转角,左转为负,右转为正,直线为0):Return:IfEnd↙……………..坐标正算说明:1:运行主程序ZBJS,选择1.SZ=>XY(正算坐标)2.XY=>反算坐标。
线路测量坐标正、反算原理及卡西欧5800计算器程序说明_secret..
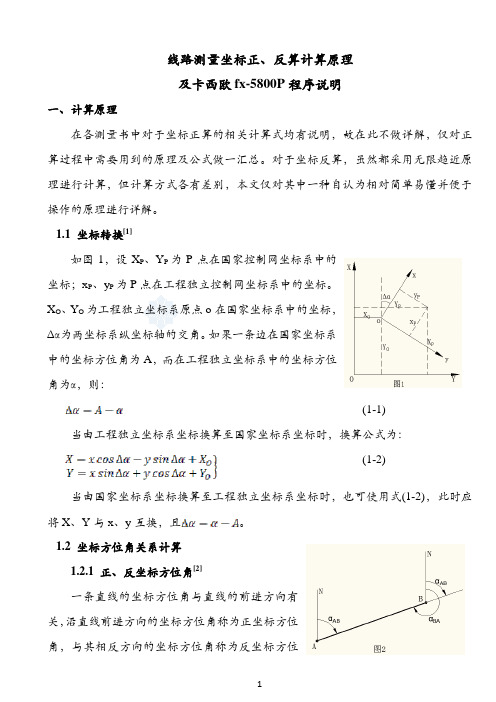
线路测量坐标正、反算计算原理 及卡西欧fx-5800P 程序说明一、计算原理在各测量书中对于坐标正算的相关计算式均有说明,故在此不做详解,仅对正算过程中需要用到的原理及公式做一汇总。
对于坐标反算,虽然都采用无限趋近原理进行计算,但计算方式各有差别,本文仅对其中一种自认为相对简单易懂并便于操作的原理进行详解。
1.1 坐标转换[1]如图1,设X P 、Y P 为P 点在国家控制网坐标系中的坐标;x P 、y P 为P 点在工程独立控制网坐标系中的坐标。
X O 、Y O 为工程独立坐标系原点o 在国家坐标系中的坐标,Δα为两坐标系纵坐标轴的交角。
如果一条边在国家坐标系中的坐标方位角为A ,而在工程独立坐标系中的坐标方位角为α,则:(1-1)当由工程独立坐标系坐标换算至国家坐标系坐标时,换算公式为:(1-2)当由国家坐标系坐标换算至工程独立坐标系坐标时,也可使用式(1-2),此时应将X 、Y 与x 、y 互换,且。
1.2 坐标方位角关系计算 1.2.1 正、反坐标方位角[2]一条直线的坐标方位角与直线的前进方向有关,沿直线前进方向的坐标方位角称为正坐标方位角,与其相反方向的坐标方位角称为反坐标方位角。
如图2,由于轴子午线之间是互相平行的,因此同一直线的正、反坐标方位角相差180°,即:(2-1)当时,取“+”号;当时,取“-”号。
1.2.2 坐标方位角的推算[3]1.2.2.1 转折角为右角如图3(a),为已知边坐标方位角,为推算边的坐标方位角,为该两边所夹的右角,则:(2-2)1.2.2.2 转折角为左角如图3(b),为已知边坐标方位角,为推算边的坐标方位角,(2-3)无论用右角还是左角推算,如遇出现负数的情形,应加上。
当推算出的坐标方位角超过,则应减去。
如果已知导线起始边的坐标方位角和导线各右角或左角时,可直接用以下公式计算第n边的坐标方位角:按右角:(2-4)按左角:(2-5)1.3基本曲线要素及坐标计算各类测量书均对曲线要素及坐标计算有详细推到过程,此处仅列出计算公式,便于程序编制说明。
5800计算器全线坐标计算放样正反算程序
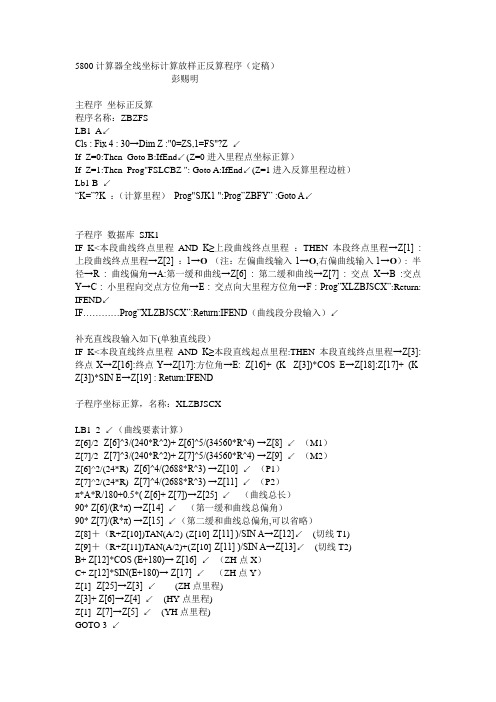
5800计算器全线坐标计算放样正反算程序(定稿)彭赐明主程序坐标正反算程序名称:ZBZFSLB1 A↙Cls : Fix 4 : 30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙(Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCBZ ": Goto A:IfEnd↙(Z=1进入反算里程边桩)Lb1 B ↙“K=”?K :(计算里程)Prog"SJK1 ":Prog”ZBFY” :Goto A↙子程序数据库 SJK1IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O(注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R : 曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Prog”XLZBJSCX”:Return: IFEND↙IF…………Prog”XLZBJSCX”:Return:IFEND(曲线段分段输入)↙补充直线段输入如下(单独直线段)IF K<本段直线终点里程AND K≥本段直线起点里程:THEN 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z[3])*COS E→Z[18]:Z[17]+ (K- Z[3])*SIN E→Z[19] : Return:IFEND子程序坐标正算,名称:XLZBJSCXLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙(切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙(切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]- Z[25]→Z[3] ↙(ZH点里程)Z[3]+ Z[6]→Z[4] ↙(HY点里程)Z[1]- Z[7]→Z[5] ↙(YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : GOTO 8↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→Z[23] ↙R*(1-COS T)+ Z[10]→Z[24] ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*S IN A→Z[23] ↙Z[13]*SIN A-U*SIN A+V*COS A→Z[24]↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙GOTO 8 ↙LLb1 8IF O<0 : THEN - Z[24]→Z[24] : IFEND ↙Z[16]+Z[23]*COS E-Z[24]*SIN E→Z[18] ↙Z[17]+Z[23]*SIN E+Z[24]*COS E→Z[19] ↙ReTurn↙子程序反算里程边桩,名称:FSLCBZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的XY坐标):“K=”?K (试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)↙Lb1 2↙Prog"SJK1 ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"S JK1":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else IF Q<S: THEN K+Q→K: Goto 2 :Else IF Q>S :THEN K-Q→K:G oto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)(由于该程序不能准确判断边桩左右方向,暂作修改,取消左右边判定)"K=":K+S→K◢(里程)Return↙子程序坐标放样:ZBFYLB1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视方位角) “QXJ=” :T◢(计算里程点切线方位角,可以不显示)“XI=” : Z[18] ◢(中线X)“YI=” : Z[19] ◢(中线Y)Pol(Z[18]-M,Z[19]-N):"DI=":I(中桩放样距)◢J<0=>J+360→J:"FI=":J→DMS◢(中桩放样方位角)“PJ=”?P◢(输入边桩与线路夹角,左-右+)“PD=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SI N(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"DP=":I◢(边桩放样距)J<0=>J+360→J:"FP=":J→DMS◢(边桩放样方位角)Return↙。
5800 坐标正算程序、坐标反算程序
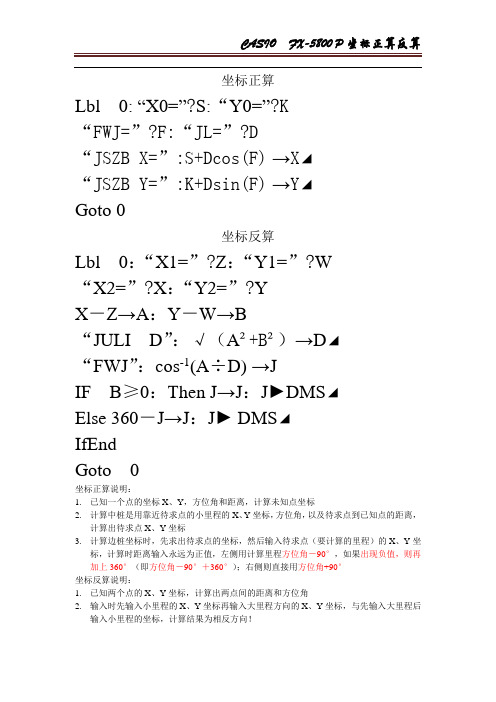
CASIO FX-5800 P坐标正算反算
坐标正算
Lbl 0: “X0=”?S:“Y0=”?K
“FWJ=”?F:“JL=”?D
“JSZB X=”:S+Dcos(F)→X◢
“JSZB Y=”:K+Dsin(F)→Y◢
Goto 0
坐标反算
Lbl 0:“X1=”?Z:“Y1=”?W
“X2=”?X:“Y2=”?Y
X-Z→A:Y-W→B
“JULI D”:√(A²+B²)→D◢“FWJ”:cos-1(A÷D) →J
IF B≥0:Then J→J:J►DMS◢
Else 360-J→J:J► DMS◢
IfEnd
Goto 0
坐标正算说明:
1.已知一个点的坐标X、Y,方位角和距离,计算未知点坐标
2.计算中桩是用靠近待求点的小里程的X、Y坐标,方位角,以及待求点到已知点的距离,
计算出待求点X、Y坐标
3.计算边桩坐标时,先求出待求点的坐标,然后输入待求点(要计算的里程)的X、Y坐
标,计算时距离输入永远为正值,左侧用计算里程方位角-90°,如果出现负值,则再加上360°(即方位角-90°+360°);右侧则直接用方位角+90°
坐标反算说明:
1.已知两个点的X、Y坐标,计算出两点间的距离和方位角
2.输入时先输入小里程的X、Y坐标再输入大里程方向的X、Y坐标,与先输入大里程后
输入小里程的坐标,计算结果为相反方向!。
卡西欧5800坐标正反算万能程序

CASIO5800计算器程序曲线任意里程中边桩坐标正反算(CASIO fx-4800P计算器)程序一、程序功能本程序由一个主程序(TYQXJS)和两个子程——正算子程序(SUB1)、反算子程序(SUB2)序构成,可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距或坐标,对该曲线段范围内任意里程中边桩坐标进行正反算。
另外也可以将本程序中核心算法部分的两个子程序移植到其它相关的程序中,用于对曲线任意里程中边桩坐标进行正反算。
本程序也可以CASIO fx-5800P计算器计算器上运行。
二、源程序1.主程序(TYQXJS)"1.SZ => XY":"2.XY => SZ":?N:"X0"? U:"Y0"? V:"S0"? O:"F0"? G:"LS"? H:"R0"? P:"RN"? R:?Q←┘1÷P-> C:(P-R)÷(2HPR) -> D:180÷π->EIf N=1:Then Goto1:Else Goto 2:IfEndLbl 1:?S:?Z:Abs(S-O) -> W:Prog "SUB1":"XS":X◢"YS":Y◢Goto 1←┘Lbl 2:?X:?Y:X-> I:Y->J:Prog "SUB2":"S":O+W-> S◢"Z":Z◢Goto 22. 正算子程序(SUB1)0.1739274226->A:0.3260725774->B:0.0694318442->K:0.3300094782->L:1-L-> F:1-K-> M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G +QEFW(C+FWD))+Acos(G+QEMW(C+MWD))) -> X:V+W(Asin(G+QEKW(C+K WD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD))+Asin(G+QEMW(C+MWD)))-> Y:G+QEW(C+WD)+90-> F:X+ZcosF-> X:Y+ZsinF-> Y3. 反算子程序(SUB2)G-90-> T:Abs((Y-V)cosT-(X-U)sinT) -> W :0-> Z:Lbl 0:Prog "SUB1":T+QEW(C+WD) ->L:(J-Y)cosL-(I-X)sinL-> Z:If Abs(Z) <0.0000001:Then Goto1:Else W+Z ->W:Goto 0:IfEndLbl 1:0 ->Z:Prog "SUB1":(J-Y)÷sinF-> Z三、使用说明1、规定(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当线元往左偏时,Q=-1;当线元往右偏时,Q=1;当线元为直线时,Q=0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5800计算器公路全线坐标正、反算计算程序FX5800全线贯通万能正、反算程序(一体化、超好用、短小、易懂)FX5800计算器的积分程序(正反算、全线贯通、新线路)终极版ZHUCHENGXU主程序"1.ZS,2.FS" ?→Q←┘输入1正算,输入2反算“NEW=0,OLD≠0”?Z←┘IfZ=0:Then“X0=”?A:“Y0=”?B:“C0=”?C:“1/R0=”?D:“1/RI=”?E:“SP=”?F:“EP=”?G:Ifend:Q=2=>Goto 2←┘Lbl1 :“KM=,<0 Stop”?H:H<0=>Stop:“PJ=”?O:“PY=”?L←┘LblZ:Z=1=> Prog“01”:Z=2=> Prog“02”←┘选择数据库文件,可增加H- F→X:0.5(E-D)÷(G-F)→N←┘C+(XD+NX2)*180÷π→P:P<0=>P+360→P:P>360=>P-360→P←┘-A+∫(cos(C+(XD+NX2)*180÷π),0,X)+Lcos(P+O)→U←┘B+∫(sin(C+(XD+NX2)*180÷π),0,X)+Lsin(P+O)→V←┘Q=2=>Goto4:Cls:Fix 3←┘"Xn=":Locate4,1,U:"Yn=": Locate5,2,V:“FWJ=”:PDMS◢Norm 2:Cls:Goto1←┘Lbl2:“XD=,<0,STOP”?R:R<0=>Stop:“YD=”?S←┘“KMDG=”?H :90→O:0→L:GotoZ←┘(H线路范围内的任意桩号)Lbl4:Pol(R-U,S-V):J<0 => J+360→J←┘Whileabs(Icos(J-P))≤0.001:P-J>180=> J+360→J: P-J<-180=> P+360→P:If P-J>0:then -I→L:else I→L :Ifend:Goto3: Whileend:H+Icos(J-P)→H:GotoZ←┘Lbl3:Cls:Fix 3←┘“KM=”: Locate4,1,H:“PY=”: Locate4,2,L◢Norm 2:Cls:Goto2←┘01(数据库子程序)If H<=第一曲线终点桩号:then第一曲线起点X→A:第一曲线起点Y→B:第一曲线起点方位角→C:起点曲率→D:终点曲率→E:起点桩号→F:终点桩号→G:return:ifend ……………程序说明:1、该程序可以计算任意线形(直线、圆曲线、缓和曲线、不完整曲线)任意桩号的坐标(正算,输入1),也可根据坐标计算该点到线路的距离及垂足桩号(反算,输入2);2、(NEW=0,OLD≠0)?如果要计算的点为数据库线路中的点,则输入数据库编号(以整数1、2、3…代替输入);如果在数据库中没有要计算线路的数据,则输入曲线要素X0:曲线起点X坐标;Y0:曲线起点Y坐标;C0:曲线起点方位角;R0-1、 RI-1:曲线起点、终点曲率,直线为0,曲线左偏输入负值,右偏输入正值;SP、 EP:曲线起点桩号,终点桩号;KM:待求点桩号;PJ:正斜交的设定;PY:偏中距离,线路上的点输入0,右偏输入+值,左偏输入-值;3、正算显示坐标及切线方位角;反算输入线路的任意桩号(此桩号越接近真实值计算速度越快)、待求点坐标,显示待求点桩号及偏中距离;4、正算子程序为积分公式编写而成;反算子程序为角度趋近的方法编写,计算速度有点慢。
5、此程序显示较直观,结果在同一屏幕显示。
注* :程序中乘号用*标示,其余为X。
5800全线任意点设计高程计算,可计算竖曲线范围内外任意点的设计高程!“BPDZH=”?Z:“GC=”?H:“R=”?R:“I1=”? I:“I2=”?L :“T=”:0.005RAbs(I -L) →T◢“E=”: T2÷2÷R◢Lbl 0:“JZZH=”?→K:Z-T→A:Z+T→B:K-A→C:B-K→D:K-Z→E←┘If L >I:Then 1→J:Else -1→J:IfEnd←┘If KB =>0→D: IfEnd←┘If K≦Z:Then I→Y:C→G:Else K >Z=>L→Y:D→G: IfEnd←┘Lbl 1:Fix 3:“H=”:H+EY÷100+JG2÷2÷R◢Goto 0←┘说明:BPDZH:前变坡点桩号用变量Z表示H:前变坡点高程R:半径I L:前后纵坡值输入格式:6.1%输入6.1,有负号的要输入负号T:切线长 E:竖距JZZH:待求点设计高程的桩号用变量K表示Fix 3:计算结果保留3位小数5800计算器公路全线坐标正、反算计算程序正算主程序(ZS)Lb1 0FIX4:?S:?Z:Prog “PM-SJ”: Abs(S-O) → W:Prog "SUB1": "XS=":X◢"YS=":Y◢F-90→F(需要时可以让他显示,不要时不必输入):Prog“SQX-SJ”: Prog“SQX”:“H=”:H◢Goto 0反算主程序(FS)正算子程序(SUB1): (P-R)÷(2HPR) → D:180÷π→ E:0.1739274226→ A:0.3260725774→ B:0.0694318442→ K:0.3300094782→ L: 1-L→ F:1-K→ M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+FWD))+Acos(G+QEMW(C+M WD))) → X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD))+Asin(G+QEMW(C+M WD))) → Y:G+QEW(C+WD)+90→ F:X+ZcosF→ X:Y+ZsinF→ Y反算子程序(SUB2):Abs((Y-V)cosT-(X-U)sin(T)) → W:0→ Z:Lbl 0:Prog "SUB1": T+QEW(C+WD)→L: (J-Y)cosL-(I-X)sinL → Z:ifAbsZ<1E-6:thenGoto1:ElssW+Z → W:Goto 0:IfEnd←┘:0→ Z:Prog "SUB1": (J-Y)÷sinF→ Z子程序(平面线形数据库)PM-SJ 1÷P→ CG-90→TLbl 1ifS ≥500(线元起点里程)AndS<769.256(线元止点里程):Then19942.837 →U (线元起点X坐标):28343.561 →V(线元起点Y坐标):500 →O(线元起点里程):125°16°31°→G(线元起点方位角):269.265 →H(线元长度):10^(45)→P(线元起点曲率半径):10^(45)→R(线元终点曲率半径):0 →Q(线元左右偏标志:左负右正):IfEnd←┘ifS ≥769.256(线元起点里程)AndS<806.748(线元止点里程):Then19787.34 →U(线元起点X坐标):28563.378→V(线元起点Y坐标):769.256→O(线元起点里程):125°16°31°→G(线元起点方位角):37.492→H(线元长度):10^(45)→P (线元起点曲率半径):221.75→R(线元终点曲率半径):-1→Q(线元左右偏标志:左负右正):IfEnd←┘ifS ≥806.748(线元起点里程)AndS<919.527(线元止点里程):Then19766.566→U(线元起点X坐标):28594.574→V(线元起点Y坐标):806.748→O (线元起点里程):120°25°54.07°→G(线元起点方位角):112.779→H(线元长度):221.75→P(线元起点曲率半径):221.75→R(线元终点曲率半径):-1→Q(线元左右偏标志:左负右正):IfEnd←┘ifS ≥919.527(线元起点里程)AndS<999.812(线元止点里程):Then19736.072 →U(线元起点X坐标):28701.893 →V(线元起点Y坐标):919.527→O(线元起点里程):91°17°30.63°→G(线元起点方位角):80.285→H(线元长度):221.75→P (线元起点曲率半径):9579.228→R(线元终点曲率半径):-1→Q(线元左右偏标志:左负右正):IfEnd←┘ifS ≥999.812(线元起点里程):Then19744.038 →U(线元起点X坐标):28781.659→V(线元起点Y坐标):999.812→O(线元起点里程):80°40°50°→G(线元起点方位角):100→H(线元长度):10^(45)→P(线元起点曲率半径):10^(45)→R(线元终点曲率半径):0 →Q(线元左右偏标志:左负右正):IfEnd←┘子程序(竖曲线数据库)SQX-SJifS≤999.812(竖曲线终点里程):then0.0357(前坡度:上坡正下坡负)→E:0.0227(后坡度:上坡正下坡负)→F:600→R(竖曲线半径):780→G(变坡点里程):110→C(变坡点高程):IfEnd←┘子程序(竖曲线计算公式)SQXE-F→J:ifJ>0:then-R→R:ElssR→R:Abs(R*J÷2)→T:IfEnd←┘ifS≤G-T:thenG-S→L:C-LE→H:IfEnd←┘ifS>G-T And S≤G: thenG-S→L:(S+T-G)²÷2÷R→N:C-LE+N → H:IfEnd←┘ifS>G And S≤G+T: then S-G→L:(G +T- S)²÷2÷R→N:C+L F+N → H:IfEnd←┘ifS>G+T :thenS-G→L:C+LF → H:IfEnd←┘三、使用说明1、规定(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当线元往左偏时,Q=-1;当线元往右偏时,Q=1;当线元为直线时,Q=0。