现代控制理论实验报告
现代理论控制实验3

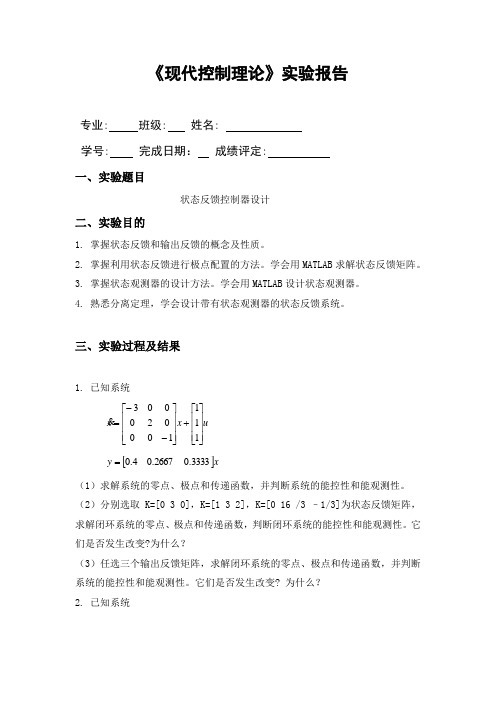
《现代控制理论》实验报告专业: 班级: 姓名: 学号: 完成日期: 成绩评定:一、实验题目状态反馈控制器设计二、实验目的1. 掌握状态反馈和输出反馈的概念及性质。
2. 掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3. 掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4. 熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
三、实验过程及结果1. 已知系统u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=111100020003 []x y 3333.02667.04.0=(1)求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
(2)分别选取K=[0 3 0],K=[1 3 2],K=[0 16 /3 –1/3]为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。
它们是否发生改变?为什么?(3)任选三个输出反馈矩阵,求解闭环系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
它们是否发生改变? 为什么?2. 已知系统u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100320100010 []x y 001=(1)求解系统的极点。
绘制系统的单位阶跃响应曲线,并确定系统的超调量和上升时间。
(2)求解状态反馈矩阵K ,使闭环系统的极点为3-和2321j ±-。
求解状态反馈系统的传递函数。
绘制该闭环系统的单位阶跃响应曲线,并确定系统的超调量和上升时间。
与原系统比较, 性能是否改善?(3)设计一个全维观测器,使观测器的极点为-5,-5,-5。
仿真状态观测器观测到的状态。
(4)建立带全维状态观测器的状态反馈系统的状态空间表达式。
求解带全维状态观测器的状态反馈系统的极点,是否是状态反馈系统和观测器的极点的组合?为什么?求解该闭环系统的传递函数,与状态反馈系统的传递函数是否一致?为什么?绘制该闭环系统的单位阶跃响应曲线,并确定系统的超调量和上升时间。
现代控制理论实训报告

一、前言随着科技的飞速发展,自动化、智能化已成为现代工业生产的重要特征。
为了更好地掌握现代控制理论,提高自己的实践能力,我参加了现代控制理论实训课程。
本次实训以状态空间法为基础,研究多输入-多输出、时变、非线性一类控制系统的分析与设计问题。
通过本次实训,我对现代控制理论有了更深入的了解,以下是对本次实训的总结。
二、实训目的1. 巩固现代控制理论基础知识,提高对控制系统的分析、设计和调试能力。
2. 熟悉现代控制理论在工程中的应用,培养解决实际问题的能力。
3. 提高团队合作意识,锻炼动手能力和沟通能力。
三、实训内容1. 状态空间法的基本概念:状态空间法是现代控制理论的核心内容,通过建立状态方程和输出方程,描述系统的动态特性。
2. 状态空间法的基本方法:包括状态空间方程的建立、状态转移矩阵的求解、可控性和可观测性分析、状态反馈和观测器设计等。
3. 控制系统的仿真与实现:利用MATLAB等仿真软件,对所设计的控制系统进行仿真,验证其性能。
4. 实际控制系统的分析:分析实际控制系统中的控制对象、控制器和被控量,设计合适的控制策略。
四、实训过程1. 理论学习:首先,我对现代控制理论的相关知识进行了复习,包括状态空间法、线性系统、非线性系统等。
2. 实验准备:根据实训要求,我选择了合适的实验设备和软件,包括MATLAB、控制系统实验箱等。
3. 实验操作:在实验过程中,我按照以下步骤进行操作:(1)根据实验要求,建立控制系统的状态空间方程。
(2)求解状态转移矩阵,并进行可控性和可观测性分析。
(3)设计状态反馈和观测器,优化控制系统性能。
(4)利用MATLAB进行仿真,观察控制系统动态特性。
(5)根据仿真结果,调整控制器参数,提高控制系统性能。
4. 结果分析:通过对仿真结果的分析,我对所设计的控制系统进行了评估,并总结经验教训。
五、实训成果1. 掌握了现代控制理论的基本概念和方法。
2. 提高了控制系统分析与设计能力,能够独立完成实际控制系统的设计。
现代控制理论实验报告

现代控制理论实验报告实验一系统能控性与能观性分析一、实验目的1.理解系统的能控和可观性。
二、实验设备1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台;三、实验容二阶系统能控性和能观性的分析四、实验原理系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。
对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。
反之,当时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。
系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式:平衡时:由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。
基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。
反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。
由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω)五、实验步骤1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。
将阶跃信号发生器选择负输出。
2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。
然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。
此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。
3.将短路帽分别接到1K、3K处,重复上面的实验。
现代控制理论实验报告
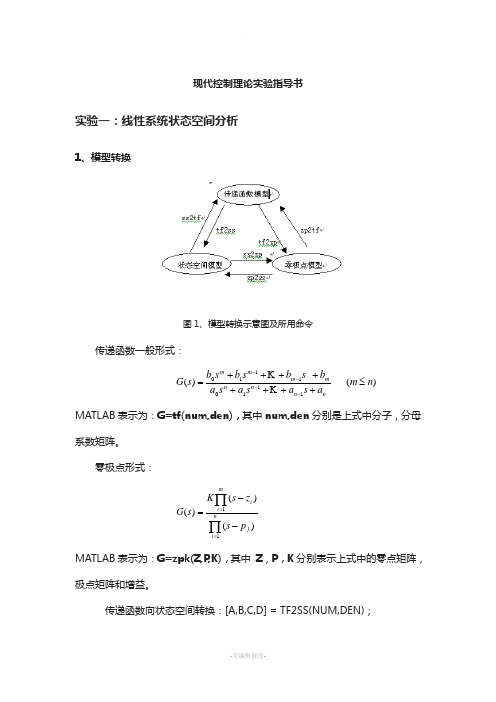
现代控制理论实验指导书实验一:线性系统状态空间分析1、模型转换图1、模型转换示意图及所用命令传递函数一般形式:)()(11101110n m a s a s a s a b s b s b s b s G n n n n m m m m ≤++++++++=----K KMATLAB 表示为:G=tf(num,den),其中num,den 分别是上式中分子,分母系数矩阵。
零极点形式:∏∏==--=n i j mi i ps z s K s G 11)()()( MATLAB 表示为:G=zpk(Z,P ,K),其中 Z ,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。
传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN);状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu表示对系统的第iu个输入量求传递函数;对单输入iu为1;验证教材P438页的例9-6。
求P512的9-6题的状态空间描述。
>> A=[0 1;0 -2];>> B=[1 0;0 1];>> C=[1 0;0 1];>> D=[0 0;0 0];>> [NUM,DEN] = ss2tf(A,B,C,D,1)NUM =0 1 20 0 0DEN =1 2 0>> [NUM,DEN] = ss2tf(A,B,C,D,2)NUM =0 0 10 1 0DEN =1 2 0给出的结果是正确的,是没有约分过的形式P512 9-6>> [A,B,C,D]=tf2ss([1 6 8],[1 4 3])A =-4 -31 0B =1C =2 5D =12、状态方程求解单位阶跃输入作用下的状态响应:G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应[y,t,x]=initial(G,x0)其中,x0为状态初值。
现代控制理论基础实验报告
紫金学院计算机系实验报告现代控制理论基础实验报告专业:年级:姓名:学号:提交日期:实验一 系统能控性与能观性分析1、实验目的:1.通过本实验加深对系统状态的能控性和能观性的理解;2.验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2、实验内容:1.线性系统能控性实验;2. 线性系统能观性实验。
3、实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R =R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R RR R ≠时u L u i R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L u i C L C L ⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=⎪⎪⎭⎫ ⎝⎛01)11(1)(1)(1)(143214343212143421243432121 (10-1)y=u c =[01]⎪⎪⎪⎭⎫⎝⎛c L u i (10-2)由上式可简写为bu Ax x+= cx y =式中⎪⎪⎭⎫ ⎝⎛=C L u i x ⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=)11(1)(1)(1)(143214343212143421243432121R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A⎪⎪⎪⎭⎫⎝⎛=01L b 1] [0=c由系统能控能观性判据得][Ab brank =2 2=⎥⎦⎤⎢⎣⎡cA c rank故系统既能控又能观。
现代控制理论实验报告中南大学

中南大学现代控制实验报告指导老师设计者学号专业班级设计日期实验一 用MATLAB 分析状态空间模型1、实验设备PC 计算机1台,MATLAB 软件1套。
2、实验目的① 学习系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;② 通过编程、上机调试,掌握系统状态空间表达式与传递函数相互转换方法。
3、实验原理说明线性系统数学模型的常见的形式有,输入输出模式数学模型(传递函数和微分方程)和状态空间模式数学模型(状态空间表达式或动态方程)。
传递函数模型一般可表示为:若上式中分子分母各项系数为常数,则系统称为线性定常系统(linear time invariant,LTI) 利用下列命令可轻易地将传递函数模型输入MATLAB 环境中。
>>num=[b0,b1,…,bn]; >>den=[1,a1,a2,…,an];而调用tf()函数可构造出对应传递函数对象。
调用格式为: >>G=tf(num,den);其中(num,den)分别为系统的分子和分母多项式系数的向量,返回变量G 为系统传递函数对象。
线性定常系统的状态空间模型可表示为表示状态空间模型的基本要素是状态向量和常数矩阵A ,B ,C ,D 。
用类似的方法可将其输入MA TLAB 环境,对单输入单输出系统,>>A=[a11,a12,…a1n;a21,a22,…a2n;…;an1,an2,…ann]; >>B=[b1;b2;…;bn]; >>C=[c1,c2,…cn]; >>D=d;调用ss()状态方程对象可构造状态方程模型,调用格式如下: >>ss(A,B,C,D)对于两种模型之间的转换,则可分别调用tf()和ss()完成,即: >>G1=tf(G) >>G2=ss(G ’)4、实验步骤① 根据所给系统的传递函数或A 、B 、C 矩阵,依据系统的传递函数阵和状态空间表达式之间的关系式,采用MATLAB 编程。
现代控制理论基础实验报告
现代控制理论基础实验报告专业:年级:姓名:学号:提交日期:实验一系统能控性与能观性分析1、实验目的:1. 通过本实验加深对系统状态的能控性和能观性的理解;2. 验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2、实验内容:1•线性系统能控性实验 2.线性系统能观性实验。
3、实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原 点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据 系统的输出能唯一地确定系统的初始状态,则称系统能观。
(10-1)i Ly=U c =[01]U c由上式可简写为x Ax bU y cxR 3对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中旦R 2 &则输入电压U 能控制i L 和U c 状态变量的变化,此时,状态是能控的;状态变量i L 与U c 有耦合关系, 输出U c 中含有i L 的信息,因此对U c 的检测能确定i L 。
即系统能观的。
R 1 R 3反之,当」时, R 2 R 4变i L 的大小,故系统不能控; 即系统不能观。
Ri R 31.1当13时R 2 R 4电桥中的由于输出R 31( R 1R 2 L (R , R 2R 3 R 4R3R4R 2c 点和d 点的电位始终相等,U c 不受输入U 的控制,u 只能改U c 和状态变量i L 没有耦合关系,故 U c 的检测不能确定i L ,丄(亠亠)C R R 2R 3 R 41 ( R 1R2 L (R R 2R 3 R 4R3R4I L U C(10-2)I LR 2R 1 R 2 i L式中X U C1 (L R 1 R 21 R2 ( —— C R 1 R 2 R3 R 4)R3 R 4R 3 R 4R 1 R 2 1 (L R 1 R 21 1 -( CR 1R 2R3 R 4) R 4 1 )R 3 R 4[0 1]由系统能控能观性判据得 ran k[b Ab] =2c rank cA 故系统既能控又能观。
现代理论控制实验3
ans =3,所以系统是能控的
由Vo=obsv(a,c);rank(Vo)得
ans =3,所以系统是能观的
(2)
a.
选取K=[0 3 0] 为状态反馈矩阵,解得闭环ห้องสมุดไป่ตู้统的零点、极点和传递函数如下
由a=[-3 0 0;0 2 0;0 0 -1];b=[1 1 1]';k=[0 3 0];a1=a+b*k得
三、实验过程及结果
1. 已知系统
(1)求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
(2)分别选取K=[0 3 0],K=[1 3 2],K=[0 16 /3–1/3]为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。它们是否发生改变?为什么?
(3)任选三个输出反馈矩阵,求解闭环系统的零点、极点和传递函数,并判断系统的能控性和能观测性。它们是否发生改变? 为什么?
[xo,x,t]=simobsv(g1,l);plot(t,x,'-k',t,xo,':r')
观测器观测到的状态如下
其中l=
(4)
三、实验结果
1(1)
系统的零点、极点和传递函数如下
由a=[-3 0 0;0 2 0;0 0 -1];b=[1 1 1]';c=[0.4 0.2667 0.3333];g1=ss(a,b,c,0);g1=tf(g1)得
g1=
由g1=zpk(g1)得
系统的零点为1,-2;系统的极点为-3,-1,2
系统的能控性和能观性判断如下
ans =3,所以系统是能控的
由Vo=obsv(a,c);rank(Vo)得
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代控制理论实验报告学院:机电学院学号:XXXXX姓名:XXXXX班级:XXXX实验一 系统的传递函数阵和状态空间表达式的转换一、实验目的1.熟悉线性系统的数学模型、模型转换。
2.了解MATLAB 中相应的函数 二、实验内容及步骤 1.给定系统的传递函数为1503913.403618)(23++++=s s s s s G要求(1)将其用Matlab 表达;(2)生成状态空间模型。
2.在Matlab 中建立如下离散系统的传递函数模型y (k + 2) +5y (k +1) +6y (k ) = u (k + 2) + 2u (k +1) +u (k ) 3.在Matlab 中建立如下传递函数阵的Matlab 模型⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++++++++++=726611632256512)(2322s s s s s s s s s s s s G4.给定系统的模型为)4.0)(25)(15()2(18)(++++=s s s s s G求(1)将其用Matlab 表达;(2)生成状态空间模型。
5.给定系统的状态方程系数矩阵如下:[]0,360180,001,0100011601384.40==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=D C B A用Matlab 将其以状态空间模型表示出来。
6.输入零极点函数模型,零点z=1,-2;极点p=-1,2,-3 增益k=1;求相应的传递函数模型、状态空间模型。
三、实验结果及分析 1. 程序代码如下:num = [18 36];den = [1 40.3 391 150]; tf(num,den) ss(tf(num,den))Transfer function:18 s + 36----------------------------s^3 + 40.3 s^2 + 391 s + 150a =x1 x2 x3x1 -40.3 -24.44 -2.344x2 16 0 0x3 0 4 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 1.125 0.5625d =u1y1 0Continuous-time model.2.2.程序代码如下:num=[1 2 1];den=[1 5 6];tf(num,den,-1)运行结果:Transfer function:z^2 + 2 z + 1-------------z^2 + 5 z + 6Sampling time: unspecified3.程序代码如下:num={[1 2 1],[1 5];[2 3],[6]};den={[1 5 6],[1 2];[1 6 11 6],[2 7]};tf(num,den)Transfer function from input 1 to output...s^2 + 2 s + 1#1: -------------s^2 + 5 s + 62 s + 3#2: ----------------------s^3 + 6 s^2 + 11 s + 6Transfer function from input 2 to output...s + 5#1: -----s + 26#2: -------2 s + 74. 程序代码如下:sys=zpk(-2,[-15 -25 -0.4],18)ss(sys)运行结果:1)Zero/pole/gain:18 (s+2)---------------------(s+15) (s+25) (s+0.4)2)a =x1 x2 x3x1 -0.4 1.265 0x2 0 -15 1x3 0 0 -25b =u1x1 0x2 0x3 8c =x1 x2 x3y1 2.846 2.25 0d =u1y1 0Continuous-time model.5.程序代码如下:A=[-40.4 -138 -160;1 0 0;0 1 0];B=[1 0 0]';C=[0 18 360];D=0;ss(A,B,C,D)运行结果:a =x1 x2 x3x1 -40.4 -138 -160x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 18 360d =u1y1 0Continuous-time model.6. 程序代码如下:sys=zpk([1 -2],[-1 2 -3],1) tf(sys)ss((sys)运行结果:Zero/pole/gain:(s-1) (s+2)-----------------(s+1) (s+3) (s-2)Transfer function:s^2 + s - 2---------------------s^3 + 2 s^2 - 5 s - 6a =x1 x2 x3x1 -1 2.828 1.414x2 0 2 2x3 0 0 -3b =u1x1 0x2 0x3 2c =x1 x2 x3y1 -0.7071 1 0.5d =u1y1 0Continuous-time model.四、实验总结本次实验主要是熟悉利用matlab建立线性系统数学模型以及模型间的相应转换(如状态空间、传递函数模型等)、并了解matlab中相应函数的使用,如tf、ss、zp2ss、ss2tf等。
通过实验指导书的指导和编写相应程序,圆满完成本次实验任务,达到了实验的目的。
专业班级 xxxx 姓 名 xxxx 实验地点 xxxx 实验日期 学 号 xxxx 实验成绩实验二 状态空间标准形与控制系统的运动分析一、实验目的1.掌握线性系统的对角线标准形、约当标准形、能控标准形和能观测标准型的表示及相应变换阵的求解。
深入理解状态空间模型的相关理论。
2. 掌握利用Matlab 进行矩阵指数函数的数值计算和符号计算方法;对定常连续系统和定常离散系统的状态空间模型进行求解,分析其运动规律;对连续系统进行离散化。
二、实验内容及步骤1.将实验一的第2题用对角标准型实现。
2.系统的动态方程如下:[]X y u X X 011,0016116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=1)求对角标准型实现,并写出实现变换的非奇异阵和变换关系。
2)求可控准型实现,并写出实现变换的非奇异阵和变换关系。
3.计算如下矩阵的特征值和广义特征向量。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111201634A4..将如下状态空间模型变换为约旦规范形。
[]Xy u X X 001,100584100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---= 5.将下列状态方程化为约当型,并写出实现变换的非奇异阵和变换关系。
⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=012010121101,110000110000112000110200001111001113B A 6.在Matlab 中计算矩阵A 在t=0.3 时的矩阵指数eAt 的值。
⎥⎦⎤⎢⎣⎡--=3210A7.计算系统在[0,10s]内, T=3s 的单位方波输入的状态响应。
⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=•21,1032100x u x X三、实验结果及分析1. 程序代码如下:num=[1 2 1]; den=[1 5 6];canon(tf(num,den),'modal') 运行结果:a =x1 x2 x1 -3 0 x2 0 -2 b =u1 x1 -10 x2 -8.944 c =x1 x2 y1 0.4 -0.1118 d =u1 y1 1Continuous-time model. 2. 程序代码如下:A=[0 1 0;0 0 1;-6 -11 -6]; B=[1 0 0]'; C=[1 1 0]; D=0;[sys,T]=canon(ss(A,B,C,D),'modal') 运行结果:a =x1 x2 x3 x1 -3 0 0 x2 0 -2 0 x3 0 0 -1b =u1x1 -7.762x2 -14.7x3 8.617c =x1 x2 x3 y1 0.2577 -0.2041 1.11e-016d =u1y1 0Continuous-time model.T =-7.7621 -11.6431 -3.8810-14.6969 -19.5959 -4.89908.6168 7.1807 1.4361A=T*A*T-1;B=T*B;C=C*T-1;D=D;2).A=[0 1 0;0 0 1;-6 -11 -6];B=[1 0 0]';C=[1 1 0];D=0;[sys,T]=canon(ss(A,B,C,D),'compaion')运行结果:a =x1 x2 x3x1 0 0 -6x2 1 0 -11x3 0 1 -6b =u1x1 1x2 0x3 0c =x1 x2 x3y1 1 0 -6d =u1y1 0Continuous-time model.T =1.0000 0 00 -1.0000 -0.16670 -0.1667 0A=T*A*T-1;B=T*B;C=C*T-1;D=D;3.程序代码如下:A=[-4 -3 -6;1 0 2 ;1 1 1];[V,D]=eig(A)运行结果:V =-0.9045 -0.9045 -0.80460.3015 0.3015 -0.26150.3015 0.3015 0.5331D =-1.0000 0 00 -1.0000 00 0 -1.00004. 程序代码如下:A=[0 1 0;0 0 1;-4 -8 -5];B=[0 0 1]';C=[1 0 0];D=0;[Q,J] = jordan(A);P=inv(Q);JA=P*A*QJB=P*BJC=C*QJD=D运行结果:JA =-1.0000 0.0000 0-0.0000 -2.0000 1.0000-0.0000 0.0000 -2.0000JB =0.2500-0.25000.5000JC =4 -2 -3JD =5. 程序代码如下:A=[3 -1 1 1 0 0;1 1 -1 -1 0 0;0 0 2 0 1 1;0 0 0 2 -1 -1;0 0 0 0 1 1;0 0 0 0 1 1];B=[1 -1 2 0 0 1; 0 1 1 -1 2 0]';[Q,D]=jordan(A);P=inv(Q);A=P*A*QB=P*B运行结果:A =2 1 0 0 0 00 2 1 0 0 00 0 2 0 0 00 0 0 0 0 00 0 0 0 2 10 0 0 0 0 2B =-0.5000 0.50000 -0.50002.0000 0-1.0000 2.00000 1.00001.00002.00006.程序代码如下:A=[0 1;-2 -3];A=A*0.3;expm(A)运行结果:ans =0.9328 0.1920-0.3840 0.35687.程序代码如下:A=[0 1; -2 -3];B=[0 1]';C=[];D=[];x0=[1 2]';sys=ss(A,B,C,D);[u,t]=gensig('square',3,10,0.1);[y,t,x]=lsim(sys,u,t,x0);plot(t,u,t,x)运行结果:四、实验总结思考题:化为能控得条件是系统能控、化为能观标准型得条件是系统能观测、化为约旦标准型的条件是系统的A矩阵的特征方程有重根。