第四章汽车转向系统动力学
汽车系统动力学
1汽车系统动力学的主要研究内容、范围及其发展方向。
答:内容和范围:严格地说,车辆动力学是研究所有与车辆系统运动有关的学科。
它涉及的范围很广,除了影响车辆纵向及其子系统的动力学响应(如发动机、传动、加速、制动、防抱死和牵引力控制系统等方面的因素)外,还有车辆在垂向和横向两个方面的动力学内容,即行驶动力学和操纵动力学。
行驶动力学主要研究由路面的不平激励,通过悬架和轮胎垂向力引起的车身跳动和俯仰以及车轮的运动;而操纵动力学研究车辆的操纵特性,主要与轮胎侧向力有关,并由此引起车辆的侧滑、横摆和侧倾运动。
发展方向:计算机技术和控制技术共同推动了现代汽车系统动力学的发展。
随着各种底盘控制系统在车辆中应用的增长趋势及各功能控制系统集成程度的日益提高,车辆动力学在未来车辆控制系统设计中的作用将愈加重要,可以预见,未来的发展将在车辆主支控制、车辆多体动力学和向“人—车—路”闭环系统的扩展等方面有所体现。
2汽车空气阻尼及怎么样降低汽车空气阻力。
答:汽车直线行驶时受到的空气作用力在行驶方向上的分力成为空气阻力。
空气阻力是空气对前进中的汽车形成的一种反向作用力,它的计算公式是:×sc w v2其中v为行车速度;s为汽车横截面面积,c w为风阻系数。
空气阻力跟速F D=116度成平方正比关系,也就是说:速度增加1倍,汽车受到的阻力会增加3倍。
因此高速行车对空气阻力的影响非常明显,车速高,发动机就要将相当一部分的动力,或者说燃油能量用于克服空气阻力。
换句话说,空气阻力小不仅能节约燃油,在发动机功率相同的条件下,还能达到更高的车速。
空气阻力的大小除了取决于车的速度外,还跟汽车的截面积s和风阻系统c w有关。
通过改善汽车的空气动力学性能,比如变化尾翼、底盘罩、前部进风口和轮毂帽,都能降低风阻系数。
而降低车身高度,等于减小了截面积,或使车身更多地着盖住轮子,也有利于降低空气阻力。
3描述主动悬架的工作原理。
答:主动悬架的控制环节中安装了能够产生抽动的装置,采用一种以力抑力的方式来抑制路面对车身的冲击力及车身的倾斜力。
汽车系统动力学课程设计
汽车系统动力学课程设计1. 背景介绍汽车是人类生活不可缺少的交通工具,而汽车工程学作为一门综合性学科,对汽车的研发、设计、制造、运营等方面有着广泛的应用。
汽车系统动力学是汽车工程学中的一个重要分支,它主要研究汽车的动力学特性,加速、制动、悬挂、转向、稳定性等方面的问题,是了解汽车运动学和研发更安全、更高效的汽车的基础。
因此,在汽车工程师的职业生涯中,系统学习汽车系统动力学是非常必要的,本文将为您详细介绍汽车系统动力学的课程设计内容。
2. 课程设计目标汽车系统动力学课程设计旨在培养学生掌握汽车动力学基本知识和实用技能,具备汽车系统动力学分析和研究能力,能够进行汽车系统动力学测试和调试,同时了解汽车系统动力学的最新发展趋势和技术。
具体目标如下:1.掌握汽车动力学基本知识,如运动学、力学、力矩平衡等。
2.学习汽车系统动力学测试和调试方法,如曲线测定法、定位仪等。
3.了解各种汽车系统动力学控制框架,如电控、液压控制等。
4.实践掌握汽车动力学仿真软件,如ADAMS、Simulink等,在实验中模拟汽车应用过程。
5.学习各种动力学仿真和测试软件的使用,如CATIA、Ansys等,增强对汽车动力学分析和研究的能力6.通过实践,了解汽车系统动力学的最新发展趋势和技术。
3. 课程设计内容汽车系统动力学课程设计主要分为以下几个方面内容:3.1 前置知识学生需要具备以下几个方面的前置知识:1.已学过物理学和动力学基础课程,并熟练掌握运动学和动力学基本概念和方法。
2.学习过机械制造基础和机械设计基础,熟悉各种主要机械构件、传动方法和结构类型。
3.掌握计算机基本原理和操作方法,了解计算机辅助设计和分析软件。
3.2 课程设计实践课程设计的核心是实践,根据上述课程设计目标,学生需要进行以下实践:1.仿真汽车运动学和动力学,分析汽车的加速度、速度、力和力矩平衡等关键参数。
2.学习和测试汽车的悬挂系统,掌握汽车的悬挂自由度和双悬挂系统的控制方法。
汽车动力学综合控制四轮分布转向和四轮分布式牵引制动系统
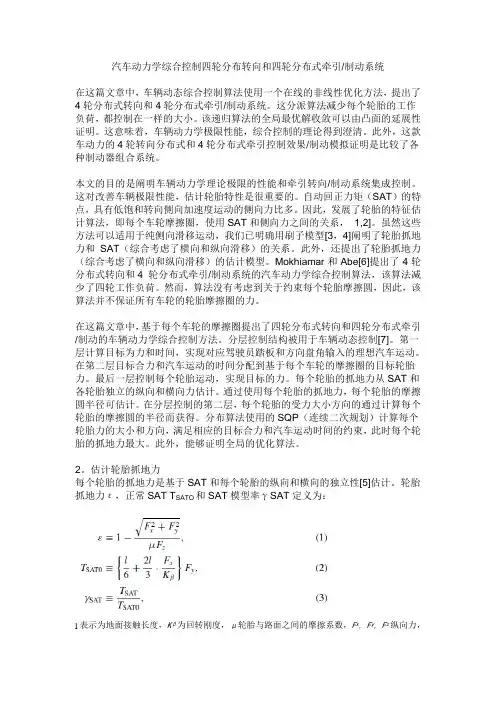
汽车动力学综合控制四轮分布转向和四轮分布式牵引/制动系统在这篇文章中,车辆动态综合控制算法使用一个在线的非线性优化方法,提出了4轮分布式转向和4轮分布式牵引/制动系统。
这分派算法减少每个轮胎的工作负荷,都控制在一样的大小。
该递归算法的全局最优解收敛可以由凸面的延展性证明。
这意味着,车辆动力学极限性能,综合控制的理论得到澄清。
此外,这款车动力的4轮转向分布式和4轮分布式牵引控制效果/制动模拟证明是比较了各种制动器组合系统。
本文的目的是阐明车辆动力学理论极限的性能和牵引转向/制动系统集成控制。
这对改善车辆极限性能,估计轮胎特性是很重要的。
自动回正力矩(SAT)的特点,具有低饱和转向侧向加速度运动的侧向力比多。
因此,发展了轮胎的特征估计算法,即每个车轮摩擦圈,使用SAT和侧向力之间的关系,1,2]。
虽然这些方法可以适用于纯侧向滑移运动,我们已明确用刷子模型[3,4]阐明了轮胎抓地力和SAT(综合考虑了横向和纵向滑移)的关系。
此外,还提出了轮胎抓地力(综合考虑了横向和纵向滑移)的估计模型。
Mokhiamar和Abe[6]提出了4轮分布式转向和4 轮分布式牵引/制动系统的汽车动力学综合控制算法,该算法减少了四轮工作负荷。
然而,算法没有考虑到关于约束每个轮胎摩擦圆,因此,该算法并不保证所有车轮的轮胎摩擦圈的力。
在这篇文章中,基于每个车轮的摩擦圈提出了四轮分布式转向和四轮分布式牵引/制动的车辆动力学综合控制方法。
分层控制结构被用于车辆动态控制[7]。
第一层计算目标为力和时间,实现对应驾驶员踏板和方向盘角输入的理想汽车运动。
在第二层目标合力和汽车运动的时间分配到基于每个车轮的摩擦圈的目标轮胎力。
最后一层控制每个轮胎运动,实现目标的力。
每个轮胎的抓地力从SAT和各轮胎独立的纵向和横向力估计。
通过使用每个轮胎的抓地力,每个轮胎的摩擦圆半径可估计。
在分层控制的第二层,每个轮胎的受力大小方向的通过计算每个轮胎的摩擦圆的半径而获得。
汽车系统动力学第二版
汽车系统动力学第二版《汽车系统动力学第二版》是一本关于汽车系统动力学的专业书籍,旨在为读者提供关于汽车动力学的全面理解。
本书通过详细介绍汽车动力学的基本概念、原理和数学模型,帮助读者深入了解汽车系统的运行原理,并掌握相关的分析和设计方法。
第一章介绍了汽车系统动力学的基本概念和研究对象。
汽车系统动力学是研究汽车运动和力学特性的学科,涉及到车辆的加速、制动、转向和悬挂等方面。
本书强调了汽车系统动力学的重要性,指出了它对汽车性能和安全性的影响。
第二章详细介绍了汽车的运动学特性。
运动学是研究物体运动规律的学科,而汽车的运动学特性则包括车辆的速度、加速度和位移等参数。
本章通过引入几何学和向量分析的知识,解释了汽车运动学的基本原理,并给出了相关的计算方法。
第三章讨论了汽车的轮胎力学特性。
轮胎是汽车与地面之间的唯一接触点,它对车辆的牵引、制动和操纵性能起着至关重要的作用。
本章介绍了轮胎的结构和工作原理,并详细阐述了轮胎与地面之间的力学相互作用。
第四章介绍了汽车的悬挂系统。
悬挂系统是连接车身和车轮的重要组成部分,它对车辆的舒适性、稳定性和操控性起着重要作用。
本章从悬挂系统的基本原理入手,介绍了常见的悬挂结构和悬挂元件的设计原则,并讨论了悬挂系统对车辆动力学性能的影响。
第五章讨论了汽车的转向系统。
转向系统是控制车辆转向运动的关键部件,它对车辆的操纵性和稳定性有着重要影响。
本章介绍了转向系统的工作原理和组成部分,并讨论了转向系统的设计和调整方法。
第六章介绍了汽车的制动系统。
制动系统是保证车辆安全的重要组成部分,它对车辆的制动性能和稳定性起着至关重要的作用。
本章详细介绍了制动系统的原理、结构和工作过程,并讨论了制动系统的设计和优化方法。
最后一章总结了全书的内容,并展望了汽车系统动力学领域的未来发展方向。
本书通过详细的理论分析和实例应用,帮助读者深入了解汽车系统动力学的原理和方法,并为汽车工程师和研究人员提供了有价值的参考资料。
汽车转向系统动力学课件

r
u/L 1 Ku2
u L
ucr
汽车的稳态横摆角速度增益曲线
4-3 稳态响应(稳态转向特性)
K 0不足转向 K=0中性转向
K 0过度转向
1
4-3 稳态响应(稳态转向特性)
K m ( L1 L2 ) L2 k2 k1
1 2 Kay L
21
4-3 稳态响应(稳态转向特性)
试验测得的(α 1-α 2)与ay的关系
4-3 稳态响应(稳态转向特性)
转向半径R:从瞬时回转中心O至汽车纵轴线 AB之间的距离
4-3 稳态响应(稳态转向特性)
1、无侧向偏离
L
R0 tan
R0
L
4-3 稳态响应(稳态转向特性)
2 、有侧向偏离
R
L
tan( 1) tan2
KL= δh/ δv
R* L cos v
L
sin[ v (1 K L )] v (1 K L )
Rg
L
hmax
KL
(1
K
L
)
LKL
h max(1 K L )
4-7 全轮转向特性
全轮转向特性
52
4-7 全轮转向特性
全轮转向特性
频率特性
53
46
4-7 全轮转向特性
全轮转向特性:是在转向时除前轮转向外,再附加 后轮转向,这种附加后轮转向角是有限的,与前轮 转向角有一定的比例关系----改善整车的转向特性 和响应特性。
Mazda-全轮转向:总系统示意图
4-7 全轮转向特性
转向角比KL:后轮转向角与前轮转向角之比,即 KL= δh/ δv
车辆系统动力学解析
汽车系统动力学的发展现状仲鲁泉2014020326摘要:汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有汽车在垂直和横向两个方面的动力学内容。
介绍车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点介绍了受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学和操纵动力学内容。
本文主要讲述的是通过对轮胎和悬架的系统动力学研究,来探究汽车系统动力学的发展现状。
关键词:轮胎;悬架;系统动力学;现状0 前言汽车系统动力学是讨论动态系统的数学模型和响应的学科。
它是把汽车看做一个动态系统,对其进行研究,讨论数学模型和响应。
是研究汽车的力与其汽车运动之间的相互关系,找出汽车的主要性能的内在联系,提出汽车设计参数选取的原则和依据。
车辆动力学是近代发展起来的一门新兴学科。
有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。
事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。
开始出现有关转向、稳定性、悬架方面的文章。
同时,人们对轮胎侧向动力学的重要性也开始有所认识。
在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。
在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。
在随后的20年中,车辆动力学的进展甚微。
进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。
这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。
随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。
人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。
汽车转向系统动力学解析
汽车质心侧偏角
C点加速度
图4-4 汽车在地面固 定坐标系中的运动描述
汽车在水平面内的运动
u V cos V
v V sin V
dv d V dt dt
当V一定时,有
du d V dt dt
dV d d V ( r ) i V ( r ) j dt dt dt
当汽车行驶时,若给转向盘某一角度,则转向轮产生 的侧偏力将绕转向主销形成回正力矩,如图4-3:
Ts ( n c )k f f k f f 2
转向盘和转向轮绕转向主销的 等效动力学方程式:
图4-3 转向侧偏力绕转 向主销的回正力矩
4.2.2 汽车转向行驶动力学方程
图4-10 车辆坐标系
4.3.2.3 惯性、车辆及中间坐标系
图4-11
惯性、车辆及中间坐标系
说明: 1.Z轴平行于ZE轴 •X轴位于包含XV轴的铅垂 平面内 1.XE轴与X轴的夹角为ψ
4.3.3 基于两自由度模型的操纵稳定性分析
4.3.3.1 汽车两自由度模型的状态空间表达
• 将转向角δ作为控制输入,因 此可以将方程写成下面的状态 空间形式 u (t ) x(t ) r 0 则可得
直线行驶性(侧向风敏感性、 侧向偏移。 路面不平敏感性)
4.1.2 转向和操纵系统动力学研究内容
汽车转向系统动力学 汽车操纵动力学
转向系统等效动力学模型 汽车转向动力学方程
汽车操纵稳定性模型建立与坐标系 基于两自由度模型的操纵稳定性分析
转向系统对汽车转向性能的影响
汽车电动助力转向系统(EPS)
4.2 汽车转向系统动力学
• 4.2.1 转向系统等效动力学模型
车四轮转向系统五自由度动力学模型
汽车四轮转向系统五自由度动力学模型作者:王敬, 王勇, 张艳芳, WANG Jing, WANG Yong, ZHANG Yan-Fang作者单位:重庆交通大学,机电与汽车工程学院,重庆,400074刊名:河北理工大学学报(自然科学版)英文刊名:JOURNAL OF HEBEI INSTITUTE OF TECHNOLOGY(NATURAL SCIENCE EDITION)年,卷(期):2008,30(3)引用次数:0次1.王京二自由度4WS汽车的动力分析(Ⅰ)--线性分析[期刊论文]-华南理工大学学报(自然科学版) 2001(6)2.姚永建.韩强四轮转向汽车的非线性模型及其动力方程[期刊论文]-华南理工大学学报(自然科学版) 2003(11)3.靳晓雄汽车振动分析 20024.S.M.凯利.贾启芬机械振动 20025.Dave Crolla.喻凡车辆动力学及其控制 20046.YOU S S.CHAI Y H Multi-objective control synthesis:an application to 4ws passenger vehicles 19997.郭孔辉汽车操纵动力学 19918.喻凡.林逸汽车系统动力学 20051.期刊论文付江华.巢凯年.丁建明.FU Jiang-hua.CHAO Kai-nian.DING Jian-ming质心转移对四轮转向汽车转向特性的影响-西华大学学报(自然科学版)2007,26(4)为了分析汽车质量和质心位置对四轮转向汽车操纵稳定性影响,本文根据二自由度四轮转向车辆的动力学模型,运用Matlab/Simulink对四轮转向特性进行仿真研究,讨论分析了汽车质量和质心位置的改变,对四轮转向车辆转向特性的影响.研究结果表明,汽车质心转移过大时,汽车操纵稳定性大大降低.2.学位论文宋作军四轮转向汽车的操纵稳定性研究2007四轮转向(4WS)的含义是指汽车除了通常的前轮转向之外,附加相应的后轮转向。
差速转向动力学
差速转向动力学一、引言差速转向是汽车的一个重要部分,它可以让车辆在转弯时更加稳定和灵活。
在本文中,我们将讨论差速转向的动力学原理。
二、差速器的基本原理差速器是汽车传动系统的一个重要组成部分,它通过不同的齿轮比例来实现左右轮胎的旋转速度不同。
当车辆行驶直线时,左右轮胎的旋转速度应该相同。
但是,在转弯时,内侧轮胎需要旋转更慢,而外侧轮胎需要旋转更快。
这就是差速器发挥作用的时候。
三、差速器的工作原理当车辆在直线上行驶时,左右两个半轴上的齿轮会以相同的速度旋转。
但是,在转弯时,内侧半轴上的齿轮需要比外侧半轴上的齿轮旋转得慢一些。
这就是因为内侧半轴所连接的车轮需要绕着一个更小的圆周运动。
为了实现这种不同速度旋转,差速器采用了一种特殊设计。
它由三个主要部分组成:环齿、行星齿轮和太阳齿轮。
当车辆在直线上行驶时,环齿和太阳齿轮的旋转速度相同,而行星齿轮不会旋转。
但是,在转弯时,内侧半轴上的环齿和太阳齿轮之间会有一个相对运动,这样就可以使内侧半轴上的车轮旋转得更慢。
四、差速器的限制差速器虽然可以使车辆在转弯时更加稳定和灵活,但它也有一些限制。
首先,差速器只能控制左右两个半轴上的车轮旋转速度,而无法控制前后两个半轴上的车轮旋转速度。
这意味着当一个车轮失去牵引力时,它会自由旋转,并且可能导致车辆失控。
此外,在某些情况下,差速器可能会因为过度滑动而损坏。
例如,在冰雪路面或泥泞路面行驶时,差速器可能会因为左右两个半轴上的车轮无法牢固地抓住地面而过度滑动。
五、结论总之,差速器是汽车传动系统的一个重要部分,它可以使车辆在转弯时更加稳定和灵活。
但是,差速器也有一些限制,需要注意使用。
在实际驾驶中,我们需要根据路况和天气状况来合理使用差速器,以确保行驶安全。
汽车转向系统动力学(五.六)
- 汽车转向系统动力学
4-5 汽车的侧翻
刚性汽车的准静态侧翻
ay 1 F zi B g 2 m g hg
1 时,若要使 F zi 2 mg
当
ay 0
则有
ay g
v
2
g
高速公路拐弯处的坡道角就是根据此原理设计的.
- 汽车转向系统动力学
4-5 汽车的侧翻
- 汽车转向系统动力学
4-6 提高操纵稳定性的电子控制系统
各个车轮制动力控制的效果
施加小制动力时,可以利 用单个车轮进行控制。右 图是对每个车轮单独施加 500N制动力时转向半径随 时间变化的曲线。可以看 出,在后内轮施加制动力 的效果最好。
- 汽车转向系统动力学
4-6 提高操纵稳定性的电子控制系统
Fy1· x2· y2· a+F B-F b=0
Fx2减小不足转向量
- 汽车转向系统动力学
4-6 提高操纵稳定性的电子控制系统
直接横摆力矩控制(Direct Yaw Moment Control)
(改变内外侧车轮驱动力分配比例提高极限工况下弯道行驶能力)
a:一般行驶 b:有横摆力矩作用,加速行驶,Fy1减小
- 汽车转向系统动力学
D: driving force distribution B: braking force distribution R: roll stiffness distribution
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s
lr l
横摆角速度: r
rs
V
l
转向半径:
R
RS
l
图4-8 极低速的等速圆周运动
满足各车轮沿轮胎平面作纯滚动的所谓阿克曼转向几何学原理。
•2)一定车速下的等速圆周运动转向特性
图4-9一定车速下的等速圆周运动
图4-10 转向半径一定时,转向盘转角随不同车速的变化
图4-11横摆角速度r与车速V的关系 (=0)
2kf
2lfkf V
r Ihd d 22 t2kf
T h(4-32)
假定 kf krk,lf lr2 l,IZm (2 l)2
4.3.1不固定转向盘转角时的汽车转向行使动力学方程
一、不固定转向盘转角
定 义:是指转向盘的转角可随意变化的情形。
式(4-2)、(4-3)可以化简为:
Ihdd22t ks()Th
(4-2)’
ks()2kf(V lf r)(4-3)’
将式(4-3)’带入(4-2)’,
得
Ihd d 22t2kf(
图4-12 汽车质心侧偏角随车速V的变化 (=0)
当驾驶员急转转向盘并固定于某一个转角时, 式(4-3)左边2项旧不能忽略了。此时,变形式 (4-3)、 (4-11)、 (4-15)和 (4-16)可得:
2 k f 2 lfV k 4-27)
m d dV 2 t(ef k k r) m V 2 V (lfef k lrk r) r 2 ef k(4-19)
2 (lfef k lrk r) IZd dr t2 (l2 feV f k l2 fk r)r 2 lfefk(4-20)
比较式(4-19)、(4-20)与 (4-15)、(4-16)可知,前者实际上 相当于是用ekf和a分别代替后者的kf 和 .
•4.2.1 等速圆周运动基本特性
汽车等速圆周运动方程为:
2 (lfefk lrk r)
2 (l2 fefk l2 fk r) V
r 2 lfefk
2 (efk k r) m V V 2(lfefk lrk r) r 2 efk
解得:
1 m lf V2
2l lrkr lr
上述两式表明,转向轮转角相对于驾驶员操作转 向盘力矩的响应和对汽车转向行驶动力学与转向系统 特性及转向轮侧偏特性密切相关。因此,要分析转向 系统对汽车转向性能的影响,还需要建立汽车转向形 式动力学方程式。
4.1.2汽车行驶动力学方程
图4-4 汽车在地面固定坐标系中的运动描述
图4-5 单位向量的时间微分
a) 车轮侧偏力
b) 车轮速度
由汽车在地面固定坐标系中的运动描述以及 单位向量的时间微分可以得到汽车运动方程式, 近似表示为:
d m(d V tr)F Y1fF Y2 fF Y1r F Y2r (4-9) IZd dr tlf(F Y1 f F Y2 f) lr(F Y 1 r F Y2 r ) (4-10)
m d d V 2 t(k f k r) m V 2 V (lfk f lrk r) r 2 k f 0(4-28)
2 (lfk f lrk r) IZd d r t2 (l2 fk fV l2 fk r)r 2 lfk f 0(4-29)
4.3 不固定转向盘转角时, 转向系统对汽车转向性能的影响
式中:前轮转向角、前后轮各侧偏角以及各侧偏力 如图4-6a所示;
m,Iz——汽车质量、绕质心C的转动惯量; lf、lr——质心C至前、后轴的距离。
又参照图4-6b,可以分别确定各车轮侧偏角为:
f1 tafn 1 V V d fl f rr2lfV r f2tafn 2V V d fl f rr2lfV r
4.1 汽车转向行驶动力学模型
4.1.1转向系统等效动力学模型
图4-1汽车转向系统
按功能原理将上述转向系统转化为绕转向主 销转动的等效动力学模型,如图4-2.
图4-2 绕转向主销的转向系统等效动力学模型
当汽车行驶时,若给转向盘某一角度,则转向轮产 生的侧偏力将绕转向主销形成回正力矩,如图4-3:
图4-3 转向侧偏力绕转向主销的回正力矩
由图4-2可分别写出转向盘和转向轮绕转向主销 的等效动力学方程式如下:
Ih(d d 22td dr) t c hd d tks( ) T h (4-2)
Is(d d 2 2 td dr)t c sd d tk s() T s 2k f f (4-3)
lf V
r)T h (4-2)’’
当 时:
m d d V 2 t( k f k r ) m V 2 V ( lfk f lr k r ) r 2 k f 0 (4-30)
2 (lfk f lrk r) IZd d r t2 (l2 fk fV l2 fk r)r 2 lfk f 0 (4-31)
rr 1 2 tta an rn r1 2 V V V V d d rr l lrr rrr r2 2 llrV r V rr
前后轮的左右轮侧偏角分别相等,可表示为
f
f
f1r1 f2r 2 l fV lrrV r
(4-11) (4-12)
经过整理后得到研究汽车转向性能的基础方程式:
1KV2 l
r 1K 1 V2 Vl
(4-23) (4-24)
因此,等速圆周运动的半径R可以表示为:
RV (1KV2) l
r
(4-25)
根据式(4-23)~(4-25)讨论分以下 两种情况:
{1)低速圆周运动转向特性 2)一定车速下的等速圆周运动转向特性
1)低速圆周运动转向特性
质心偏侧角:
m d dV 2 t(k f k r) m V 2 V (lfk f lrk r) r 2 k f (4-15)
2 (lfkf lrk r) IZd dr t2 (l2 fkfV l2 fk r)r 2 lfkf (4-16)
4.2 等速圆周运动基本特性
4.2.1 转向盘转角固定时的汽车转向行驶动力学方程