基于Matlab环境仿真基础实验
现代控制理论-基于MATLAB的实验指导书课程设计指导书
现代控制理论基于MATLAB的实验指导书第一部分实验要求1.实验前做好预习。
2.严格按照要求操作实验仪器,用毕恢复原状。
3.实验完成后,由指导教师检查实验记录、验收仪器后,方可离开。
4.实验报告应包括以下内容:1)实验目的;2)实验原理图;3)实验内容、步骤;4)仿真实验结果(保留仿真实验波形,读取关键参数);5)仿真实验结果分析。
第二部分MATLAB平台介绍实际生产过程中,大部分的系统是比较复杂的,并且要考虑安全性、经济性以及进行实验研究的可能性等,这在现场实验中往往不易做到,甚至根本不允许这样做。
这时,就需要把实际系统建立成物理模型或数学模型进行研究,然后把对模型实验研究的结果应用到实际系统中去,这种方法就叫做模拟仿真研究,简称仿真。
到目前为止,已形成了许多各具特色的仿真语言。
其中美国Mathworks软件公司的动态仿真集成软件Simulink与该公司著名的MATLAB软件集成在一起,成为当今最具影响力的控制系统应用软件。
国内MA TLAB软件的著名论坛为“MATLAB中文论坛”,网址为:https:///forum.php,建议同学们注册并参与论坛相关内容的讨论。
图1 MA TLAB仿真环境第三部分 实验实验一线性系统的时域分析实验目的熟悉MATLAB 环境,掌握用MATLAB 控制系统工具箱进行线性定常系统的时域分析、能控性与能观性分析、稳定性分析的方法。
实验要求完成指导书规定的实验内容,记录并分析实验结果,写出实验报告。
实验内容1.已知系统的状态模型,求系统在单位阶跃输入下的各状态变量、输出响应曲线。
例:[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡2121214493.69691.1,0107814.07814.05572.0x x y u x x x x 。
键入:a = [-0.5572, -0.7814; 0.7814,0]; b = [1; 0]; c = [1.9691,6.4493]; d = 0;[y, x, t]=step(a, b, c, d); plot(t, y); grid (回车,显示输出响应曲线。
控制工程实训课程学习总结基于MATLAB的系统建模与仿真实验报告
控制工程实训课程学习总结基于MATLAB 的系统建模与仿真实验报告摘要:本报告以控制工程实训课程学习为背景,基于MATLAB软件进行系统建模与仿真实验。
通过对实验过程的总结,详细阐述了系统建模与仿真的步骤及关键技巧,并结合实际案例进行了实验验证。
本次实训课程的学习使我深入理解了控制工程的基础理论,并掌握了利用MATLAB进行系统建模与仿真的方法。
1. 引言控制工程是一门应用广泛的学科,具有重要的理论和实践意义。
在控制工程实训课程中,学生通过实验来加深对控制系统的理解,并运用所学知识进行系统建模与仿真。
本次实训课程主要基于MATLAB软件进行,本文将对实验过程进行总结与报告。
2. 系统建模与仿真步骤2.1 确定系统模型在进行系统建模与仿真实验之前,首先需要确定系统的数学模型。
根据实际问题,可以选择线性或非线性模型,并利用控制理论进行建模。
在这个步骤中,需要深入理解系统的特性与工作原理,并将其用数学方程表示出来。
2.2 参数识别与估计参数识别与估计是系统建模的关键,它的准确性直接影响到后续仿真结果的可靠性。
通过实际实验数据,利用系统辨识方法对系统的未知参数进行估计。
在MATLAB中,可以使用系统辨识工具包来进行参数辨识。
2.3 选择仿真方法系统建模与仿真中,需要选择合适的仿真方法。
在部分情况下,可以使用传统的数值积分方法进行仿真;而在其他复杂的系统中,可以采用基于物理原理的仿真方法,如基于有限元法或多体动力学仿真等。
2.4 仿真结果分析仿真结果的分析能够直观地反映系统的动态响应特性。
在仿真过程中,需对系统的稳态误差、动态响应、鲁棒性等进行综合分析与评价。
通过与理论期望值的比较,可以对系统的性能进行评估,并进行进一步的优化设计。
3. 实验案例及仿真验证以PID控制器为例,说明系统建模与仿真的步骤。
首先,根据PID控制器的原理以及被控对象的特性,建立数学模型。
然后,通过实际实验数据对PID参数进行辨识和估计。
自动控制原理MATLAB仿真实验(于海春)
自动控制原理MATLAB仿真实验(于海春)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入imulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个imulink仿真环境常规模板。
图1-1SIMULINK仿真界面图1-2系统方框图3.在imulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击imulink下的“Continuou”,再将右边窗口中“TranferFen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在imulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的imulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击imulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
基于MATLAB控制系统仿真实验报告
tf 4
y0
0 1
6、求出 G1(s)
2 (s2 2s 1) 与 G2 (s)
1 (2s3
3s2
1)
的单位阶跃响应,并分别
求出状态空间模型。
解:(1) G1(s) 2 (s2 2s 1) 的状态空间模型求解如下:
function shiyan2 b1=[2];
D(z)
0.62(1 0.136z 1)(1 0.183z (1 0.045z 1)(1 0.53z 1)
1 )
分别用仿真算法得到系统在单位阶跃输入作用下的响应,系统在单位速度输
入是的输出响应。
解:(1)首先将 W1(s)转换为 W1(z),采样周期 T=0.2s,程序清单如下: function shiyan42 num=[10];den=[0.005 0.15 1 0]; ts=0.2;[nc,dc]=c2dm(num,den,ts)
INTRO(注意:intro 为一个用 MATLAB 语言编写的幻灯片程序,主要演示
常用的 MATLAB 语句运行结果。)
然后,根据现实出来的幻灯片右面按钮进行操作,可按 START——NEXT—
—NEXT 按钮一步步运行,观察。
3、自编程序并完成上机编辑,调试,运行,存盘:
(1)用 MATLAB 命令完成矩阵的各种运算,例如:
5、利用 ode23 或 ode45 求解线性时不变系统微分方程 y(t) Ay(t) ,并绘制出 y(t)
曲线,式中
A
0.5
1
1 0.5
t t0 t 如下: function xdot=fun21(t,x) A=[-0.5 1;-1 -0.5]; xdot=A*x; function fzsy22 t0=0;tf=4;tol=1e-6; x0=[0;1];trace=1; [t,x]=ode23('fun21',t0,tf,x0,tol,trace); plot(t,x) 得到的实验结果如下图所示:
基于MATLAB的《自动控制系统》仿真实验系统实现
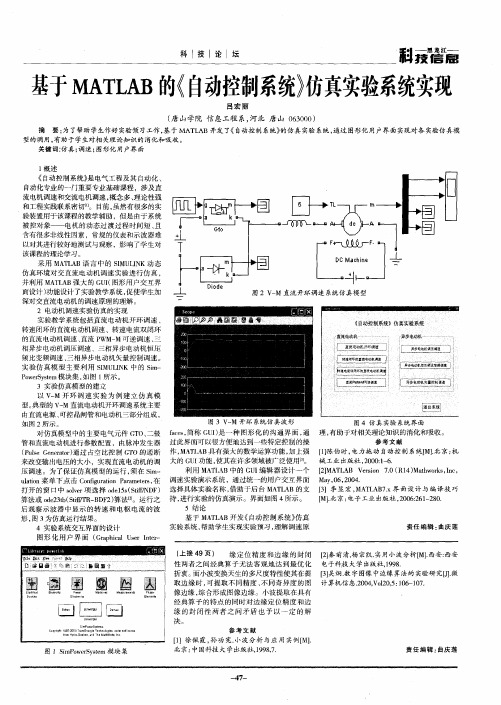
图 4 仿 真 实验 系统 界 面 理, 有助于对相关理论知识的消化和吸收。
参 考文 献
f] 伯 时 , 1陈 电力 拖 动 自动 控 制 系 统 [ . 京 : M】 北 机
械 工 业 出版 社 . 0 01 6 2 0 :- .
[] T A V rin . R1 ) tw rsIc 2MA L B es 7 o 0( 4 Mah ok , , n
由直 流电源 、 可控晶闸管和电动机 _ 二部分组成 , 如 网 2所示 。 对仿真模 型中的主要电气元件 G O 二极 T 、 管 和直流 电动机进行参数配置 ,由脉冲发生器 ( us e ea r通过 占空 比控制 GT P l G nrt ) e o O的通断 来改变输 出电压的大小 ,实现直流电动机的调 压调速 。为了保证仿 真模 型的运行 , 须在 S — i e r uai ltn菜单下点 击 C n grt n P rm tr, o of uao aa ees 在 i i 打开 的窗 口中 s vr 选择 oe5 (b D ) o e项 l d ls s N F 算法或 o e3 (tf R B F ) d2 t S fT — D 2 算法 b i/ 。运行 之 后观 察示波 器 中显示 的转速 和 电枢 电流 的波 形, 3 图 为仿真运行结果 。 4实验系统交互界 面的设计 图形 化 用户 界 面 ( rp ia U e ne一 G ahcl srIt r
直 流 开 环 调速 系统 仿 真模 型
实验 仿真模 型 主要利 用 SM LN 中的 S — I U IK i m Pw r s m模 块集 , o e yt S e 如图 1 所示 。 3实验仿真模型的建立 以 V M开 环 调速 实 验 为例 建 立仿 真模 — 型。 典型的 V M直流 电动机开环调速系统主要 —
基于matlab的一阶系统及二阶系统时域特性仿真实验(1)

实验一 一阶系统及二阶系统时域特性MatLab 仿真实验(2学时)一、实验目的1、使学生通过实验中的系统设计及理论分析方法,帮助学生进一步理解自动控制系统的设计与分析方法。
2、熟悉仿真分析软件。
3、利用Matlab 对一、二阶系统进行时域分析。
4、掌握一阶系统的时域特性,理解常数T 对系统性能的影响。
5、掌握二阶系统的时域特性,理解二阶系统重要参数对系统性能的影响。
二、实验设备计算机和Matlab 仿真软件。
三、实验内容1、一阶系统时域特性 一阶系统11)(+=Ts s G ,影响系统特性的参数是其时间常数T ,T 越大,系统的惯性越大,系统响应越慢。
Matlab 编程仿真T=0.4,1.2,2.0,2.8,3.6,4.4系统单位阶跃响应。
2、二阶系统时域特性a 、二阶线性系统 16416)(2++=s s s G 单位脉冲响应、单位阶跃响应、单位正弦输入响应的 Matlab 仿真。
b 、下图为具有一微分负反馈的位置随动系统框图,求出系统的闭环传递函数,根据系统瞬态性能指标的定义利用Matlab 分别计算微分反馈时间常数τ为0,0.0125,0.025时系统的上升时间、峰值时间、最大超调量和调整时间。
C 、二阶线性系统3612362++s s ξ,当ξ为0.1,0.2,0.5,0.7,1.0,2.0时,完成单位阶跃响应的Matlab 仿真,分析ξ值对系统响应性能指标的影响。
四、实验要求1、进入机房,学生要严格遵守实验室规定。
2、学生独立完成上述实验,出现问题,教师引导学生独立分析和解决问题。
3、完成相关实验内容,记录程序,观察记录响应曲线,响应曲线及性能指标进行比较,进行实验分析4、分析系统的动态特性。
5、并撰写实验报告,按时提交实验报告。
五、Matlab 编程仿真并进行实验分析一、一阶系统时域特性:clearclcnum=1for del=0.4:0.8:4.4den=[del 1];step(tf(num,den))hold onendlegend('T=0.4','T=1.2','T=2.0','T=2.8','T=3.6','T=4.4')如图为T=0.4,1.2,2.0,2.8,3.6,4.4系统单位阶跃响应。
塔里木大学MATLAB及仿真应用实验报告8
2.了解Simulink的各个模块。
实验结果分析
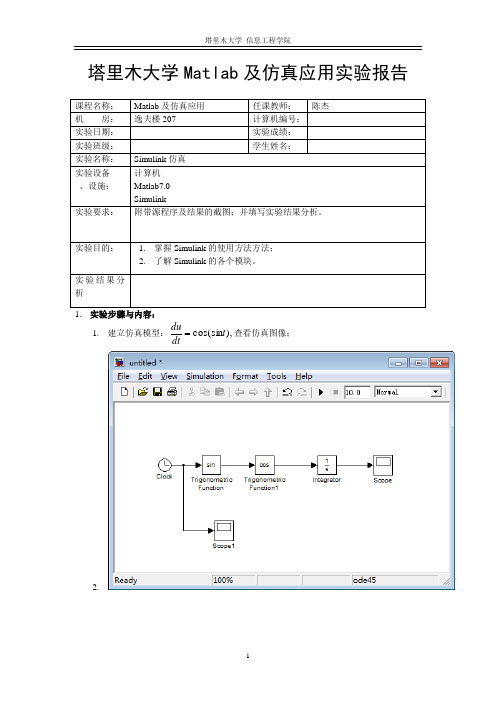
1.实验步骤与内容:
1.建立仿真模型: 查看仿真图像;
2.
3.
4.
2.用一个示波器同时显示多个仿真结果:
3.利用simulink仿真 。
4.产生一个高度为1,宽度为4,延时为4秒的矩形脉冲信号
5.系统的微分方程为 ,其中u(t)是幅度为1,角频率为1rad/s的方波输入信号,试建立simulink模型并仿真;
塔里木大学Matlab及仿真应用实验报告
课程名称:
Matlab及仿真应用
任课教师:
陈杰
机房:
逸夫楼207
计算机编号:
实验日:
实验成绩:
实验班级:
学生姓名:
实验名称:
Simulink仿真
实验设备
、设施:
计算机
Matlab7.0
Simulink
实验要求:
附带源程序及结果的截图;并填写实验结果分析。
实验目的:
6.
7.一系统如下图所示:其中 , ,系统的输入信号为 ,用simulink求取系统输出相应,并将输入输出信号对比显示。
《MATLAB仿真技术》实验指导书2016附问题详解
实验项目及学时安排实验一 MATLAB环境的熟悉与基本运算 2学时实验二 MATLAB数值计算实验 2学时实验三 MATLAB数组应用实验 2学时实验四 MATLAB符号计算实验 2学时实验五 MATLAB的图形绘制实验 2学时实验六 MATLAB的程序设计实验 2学时实验七 MATLAB工具箱Simulink的应用实验 2学时实验八 MATLAB图形用户接口GUI的应用实验 2学时实验一 MATLAB环境的熟悉与基本运算一、实验目的1.熟悉MATLAB开发环境2.掌握矩阵、变量、表达式的各种基本运算二、实验基本知识1.熟悉MATLAB环境:MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。
2.掌握MATLAB常用命令3.MATLAB变量与运算符变量命名规则如下:(1)变量名可以由英语字母、数字和下划线组成(2)变量名应以英文字母开头(3)长度不大于31个(4)区分大小写MATLAB中设置了一些特殊的变量与常量,列于下表。
MATLAB运算符,通过下面几个表来说明MATLAB的各种常用运算符4.MATLAB的一维、二维数组的寻访表6 子数组访问与赋值常用的相关指令格式5.MATLAB的基本运算表7 两种运算指令形式和实质涵的异同表6.MATLAB的常用函数表8 标准数组生成函数表9 数组操作函数三、实验容1、学习使用help命令,例如在命令窗口输入help eye,然后根据帮助说明,学习使用指令eye(其它不会用的指令,依照此方法类推)2、学习使用clc、clear,观察command window、command history和workspace等窗口的变化结果。
3、初步程序的编写练习,新建M-file,保存(自己设定文件名,例如exerc1、exerc2、 exerc3……),学习使用MATLAB的基本运算符、数组寻访指令、标准数组生成函数和数组操作函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代控制理论实验
1
实验目的:
熟悉和了解Matlab 的基本使用环境,通过该实验,使学生初步掌握一项仿真工 具。
了解和掌握 Matlab 的两个主要编程环境 (M-file 、Model )。
实验要求:(1、2任选其一)
在Model 文件下,建立I 型三阶系统的结构模型,分析输入斜坡响应的静动态 指标。
实验设备:
计算机、Mtalab 软件
PaoeSeti^iM.
1 Filn^fllflb'ihra-k'irslll.m 工址a 吐■'iHUfkl 申呻.E
1 Filnwtfllablwwk'iExlM.m
Cbdtq
图1.1 Matlab 使用界面
实验
基于Matlab 环境仿真基础实验
1、
2、
1、
2、
在M-file 文件下,编制自然频率一定,不同阻尼系数的单位阶跃响应的响应
曲线。
在M-file 文件下,编制自然频率一定,不同阻尼系数的
Bode 图
3、
四、 实验内容及步骤:
1、
使用界面的介绍:
」
A
J M ■吐
CK*O
ibse Command y^ndow w
HodW
Import X A ...
Ed MATLAB k JLT
Srt F ■笛b ,.
FreftfierLcs.
-ICI K|
:t "KWUE Jidp- Erm tht HOP ntira.
rtCtwzlCTr. I F:血皿
"htlp f<T ■oTt info.
现代控制理论实验
2 —
0.1;0.2;0.3;0.4;
跃响应。
解:Matlab
% wn=6 时,
…;1.0;2.0 时,在M — file
文件下,编制程序。
绘制的各自单位阶
程序 阻尼系数
0.1;0.2;0.3……1.0;2.0
的单位阶跃响应
wn=6;
自然振荡频率
kosi=[0.1:0.1:1.0,2.0]; figured) hold on for kos=kosi
num=wn
人2;
den=[1,2*kos*w n,wn 人2];
ste p(nu m,de n) end title(' 阶跃响应')
hold off
执行后单位阶跃响应曲线
阻尼系数
1.8
1.6
1.4
1.2
0.8
0.6
0.4
0.2
阶跃响应
|一 0.1
一
0.2
_ 0.3
一
0L L L g 1 11 B L t L ■ 0123456789
10
Time (sec)
图1.2典型二阶系统的单位阶跃响应曲线
在file\New\M-file 建立M 文件;在file\New\Model 建立模型文件。
在主窗体部
分可以直接输入命令;也可以观看运算结果,它是直接反映运算信息的重要窗口。
2、 对于一个典型二阶系统
H(S
2s2+2^n S +B 2
其中(>)n 为自然频率(无阻尼振荡频率),匕为相对阻尼系数。
当
轧=6,巴分别为
现代控制理论实验
步骤:
(1)。
在M — file 文件下,编制自然频率一定,
对于一个典型二阶系统
H
(s)
=S+
其中《n 为自然频率(无阻尼振荡频率)
匕为相对阻尼系数。
当
= 6, E 分别为
semilogx(w1,mag) sub plot(2,1,2) hold on semilogx(w1, pha) end
sub plot(2,1,1) grid on title('Bode xlabel(' ylabel(' sub plot(2,1,2)
grid on
xlabel(' 频率(rad/sec )') ylabel(' 相位 deg') hold off
执行后Bode 图
L
0.1;0.2;0.3;0.4; 数的Bode 图: 解:Matlab % wn=6 时, wn=6 kosi=[0.1:0.1:1.0] w=logs pace(-1,1,100) figure(1) num=wnA2 for kos=kosi den=[1 2*kos*w n wn 人2] [mag, pha,w1]=bode( nu m,de n,w) sub plot(2,1,1) hold on
…;1.0;2.0 时,在 M — file 程序 阻尼系数 0.1;0.2;0.3......1.0 文件下,编制程序。
绘制的不同阻尼系
的bude 图
3、
图')
频率(rad/sec )') 增益
db')
Bode 图
现代控制理论实验
4 —
10
= 2
s(s +9s+8)
试分析系统的静态偏差,和响应的动态指标。
思考题
如何调用mi- file 的库文件。
如何快速查找
model 的库元件。
4
、
建立 Model 文件,对I 型三阶系统的动静态性能指标进行分析。
系统开环传递函数:
试对斜坡函数的响应与稳态误差进行分析。
图1.4三阶系统斜坡响应仿真结构图
图1.5三阶系统斜坡响应响应曲线图
G(s) 五、
12、。