台达A2伺服原点回归
台达DVP-ES2C系列与ASDA-A2伺服电机调试方法

台达绝对型编码器伺服系统的参数设置(DVP32ES200RC/TC与ASDA-A2 伺服驱动器)使用之前需要对CANopen型号的PLC进行韧体的更新。
(对应的版本为V3.43)刻录方式:1.PC 要与 ES2-C PLC 通过 IFD6601 链接。
2.点开有.exe 的文件,选择正确的 COM口。
3.鼠标点击 START burn 开始刻录,待PLC上面的EPROM指示灯闪烁红色以后,重新启动PLC,4.重启后,再次鼠标点击 START burn 开始刻录可以看到白色进度条在移动(红色进度条也是一样的,白色代表版本升级,红色代表版本降级),同时看到 Progress 有显示百分数值,到达百分之百为刻录完成。
5.刻录后检查版本刻录情况一,硬件 DI 信号配置 :DI1 → PL : 正向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱动(P2-10),用常闭接近开关,设置为23.器显示异警。
DI2 → NL : 逆向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱(P2-11),用常闭接近开关,设置为22.动器显示异警。
DI3 → EMGS : 为 B 接点,必须时常导通(ON),否则驱动器显示异警。
(P2-12),用常闭接近开关,设置为21.DI4 → ORGP : 在内部位置缓存器模式下,在搜寻原点时,此讯号接通后伺服将此点之位置当成原点。
(可以不接)二,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
3.设定伺服控制模式,将 P1-01 设置为 0001(PR 模式)具体方向可以根据实际情况更改。
4.P3-01通讯速度设置为 0403(1M)。
5.站号设定 : 依照需要的台数,分别设置每台伺服的 P3-00,请依序设定为 1、2、3 …最多可设定 8 台。
6.将伺服断电后重新上电。
台达DVP-ES2C系列与ASDA-A2伺服电机调试方法
台达绝对型编码器伺服系统的参数设置(DVP32ES200RC/TC与ASDA-A2 伺服驱动器)使用之前需要对CANopen型号的PLC进行韧体的更新。
(对应的版本为V3.43)刻录方式:1.PC 要与 ES2-C PLC 通过 IFD6601 链接。
2.点开有.exe 的文件,选择正确的 COM口。
3.鼠标点击 START burn 开始刻录,待PLC上面的EPROM指示灯闪烁红色以后,重新启动PLC,4.重启后,再次鼠标点击 START burn 开始刻录可以看到白色进度条在移动(红色进度条也是一样的,白色代表版本升级,红色代表版本降级),同时看到 Progress 有显示百分数值,到达百分之百为刻录完成。
5.刻录后检查版本刻录情况一,硬件 DI 信号配置 :DI1 → PL : 正向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱动(P2-10),用常闭接近开关,设置为23.器显示异警。
DI2 → NL : 逆向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱(P2-11),用常闭接近开关,设置为22.动器显示异警。
DI3 → EMGS : 为 B 接点,必须时常导通(ON),否则驱动器显示异警。
(P2-12),用常闭接近开关,设置为21.DI4 → ORGP : 在内部位置缓存器模式下,在搜寻原点时,此讯号接通后伺服将此点之位置当成原点。
(可以不接)二,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
3.设定伺服控制模式,将 P1-01 设置为 0001(PR 模式)具体方向可以根据实际情况更改。
4.P3-01通讯速度设置为 0403(1M)。
5.站号设定 : 依照需要的台数,分别设置每台伺服的 P3-00,请依序设定为 1、2、3 …最多可设定 8 台。
6.将伺服断电后重新上电。
台达PLC控制伺服电机实现原点回归和定位

台达PLC控制伺服电机实现原点回归和定位一、引言随着现代工业自动化的发展,伺服电机作为一种高性能的执行器被广泛应用于各种自动化设备中。
伺服电机通过PLC控制可以实现精确的运动控制和定位,其中包括对伺服电机进行原点回归和定位操作。
本文将介绍如何使用台达PLC控制伺服电机实现原点回归和定位。
二、伺服电机原点回归伺服电机的原点回归是指将伺服电机运动到事先设定好的原点位置。
下面是实现伺服电机原点回归的步骤:1.设定原点位置:首先,在PLC程序中定义伺服电机的原点位置。
原点位置可以是一个特定的坐标或一个传感器信号。
2.设置运动参数:根据实际情况,设置伺服电机的运动速度、加速度和减速度等参数。
3.启动伺服电机:通过PLC程序,给伺服电机发送运动指令,使其开始运动。
同时,监控伺服电机的位置。
4.到达原点位置:当伺服电机到达定义的原点位置时,通过PLC程序停止伺服电机的运动。
5.记录位置信息:记录伺服电机的位置信息,方便后续的定位操作。
三、伺服电机定位伺服电机的定位是指将伺服电机准确地移动到给定的位置。
下面是实现伺服电机定位的步骤:1.设定目标位置:在PLC程序中定义伺服电机的目标位置。
目标位置可以是一个特定的坐标或一个传感器信号。
2.设置运动参数:根据实际情况,设置伺服电机的运动速度、加速度和减速度等参数。
3.启动伺服电机:通过PLC程序,给伺服电机发送运动指令,使其开始运动。
同时,监控伺服电机的位置。
4.到达目标位置:当伺服电机到达指定的目标位置时,通过PLC程序停止伺服电机的运动。
5.记录位置信息:记录伺服电机的位置信息,方便后续的定位操作。
四、PLC控制台达伺服电机实现原点回归和定位的注意事项在使用PLC控制台达伺服电机实现原点回归和定位时,需要注意以下事项:1.伺服电机位置的监控:通过PLC程序实时监控伺服电机的位置,可以根据实际情况进行调整。
2.运动参数的设置:根据实际需求,设置伺服电机的运动速度、加速度和减速度等参数。
伺服运动控制的原点回归问题以及常见的方式
伺服运动控制的原点回归问题以及常见的方式原点回归,又名原点复位、伺服回零...等等。
在进行伺服定位操作之前一般都需要先进行原点回归,否则伺服电机可能会罢工,说是在「原点回归未完成时启动」。
那么,为什么要进行原点回归?以及,怎样进行原点回归的操作呢?1、原点回归的必要性所谓定位,就是要让伺服电机走到一个确定的位置。
这个位置可以是增量式的,也可以是绝对式的。
打个比方,我们现在在路上,我们要往前走 10 米,相当于我们的位置要往前增加十米,这个十米就是一个位置增量。
而如果我们要去这条街上某处地方的咖啡店,我们就需要知道它的确切地址,假设这条街的地址不是门牌号,而是从街的一端开始为0 米(基准位置),这样就能确定这条街上每个位置的地址,比如这家咖啡店的地址是这条街 100 米的位置,那么这个 100 米就是一个绝对位置,我们不管在哪一个位置,都能通过走到这条街100 米的位置找到这家咖啡店。
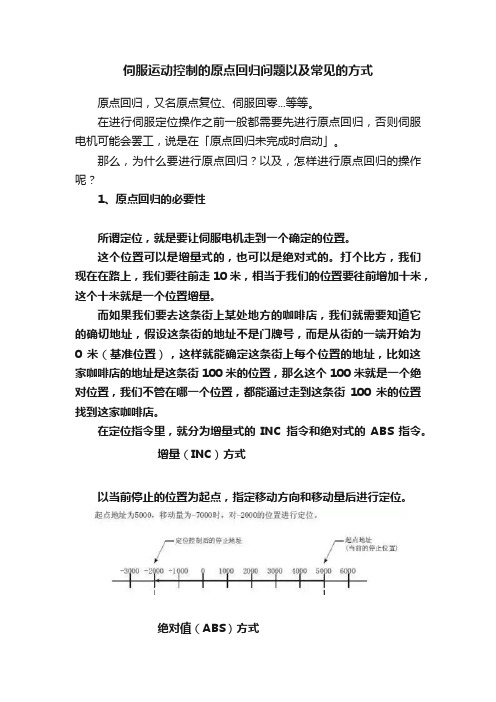
在定位指令里,就分为增量式的INC 指令和绝对式的ABS 指令。
增量(INC)方式以当前停止的位置为起点,指定移动方向和移动量后进行定位。
绝对值(ABS)方式定位到指定的地址,该地址是以原点为基准的位置。
所以,当我们需要进行绝对式定位时,我们就需要对应的机械系统上具有地址,这也就需要一个基准位置,通过这个基准位置去确定机械系统上的每个位置的地址。
而这个基准位置,在伺服定位系统里称为原点。
2、两个信号在三菱的伺服定位系统里,有两个关于原点的关键信号:原点回归请求信号(原点复位请求标志)这个信号ON 的时候,说明伺服系统目前没有原点,需要进行原点回归。
原点回归完成信号(原点复位完成标志)当原点回归执行完成时,该信号会ON。
然后如果执行定位或者其他正常方式使得伺服电机离开原点位置时,该信号会OFF,但是此时原点还是存在的。
判断是否需要原点回归可以借助原点回归请求信号,而不应该借助原点回归完成信号。
对于增量式系统,每次断电复位、重新上电之后都需要进行原点回归。
伺服电机原点回归方式、原理以及作用
伺服电机原点回归方式、原理以及作用伺服电机原点回归问题1. 伺服回零的作用零点位置是通过程序复位控制回零或者在回零过程中感应到原点限位的时候,把当前位置值清零,表示原点或零点,一切位置都是以原点为基础,确定零点位置的时候,应先确定运动的正向和负向,以及电机的实际运动方向。
2. 伺服回零情况2.1 原点搜索是原点没有建立的情况下执行。
2.2 原点返回是原点已经建立的情况下,返回到原点位置。
第一次上电先用建立原点,当后面的动作远离了这个原点,想返回去的时候,选择原点返回。
2.3 一般来说,伺服电机的编码器有两种,绝对值编码器和增量式编码器.绝对值编码器断电可以保持,只要电池还有电,是不需要寻原点的;增量式编码器由于断电后会丢失电机多圈数值,故需要寻原点操作。
3. 伺服启动的初始定位3.1 伺服定位原理3.1.1 伺服系统不允许系统在没有任何准备的情况下使电机旋转。
电机转子在任何位置永磁伺服系统都能准确定位,定位时间很短,最多经过十多次的定位试探,电机转子就能咬合。
运行中利用光电编码盘的Z 信号对电机反馈脉冲进行修正。
3.1.2 对矢量控制的分析,当输出电流矢量与转子轴不重合时,电机转子会转动到该处并与定子输出电流矢量方向重合。
基于这种控制思想来对转子初始位置进行检测。
伺服系统中采用Z脉冲作为复位信号,因此必须知道该信号产生的位置和定子a相轴线的夹角,而这一夹角取决于光电编码器的安装位置。
3.1.3 由于光电编码盘的安装问题, 常常使Z脉冲的位置和定子a 相轴线不重合, 此时需要先进行调零处理。
可以分为硬件和软件的调零;硬件调零就是通过旋转光电码盘的位置, 使Z脉冲出现的位置与定子a 相轴线重合;软件调零可以检测出Z脉冲的位置和定子 a相轴线的夹角, 并进行软件补偿。
3.2 启动初始定位的作用:电机伺服系统离不开对转子位置(或磁场)的检测和初始定位。
只有检测到初始转子实际位置后,控制系统才能正常工作。
台达PLC控制伺服电机实现原点回归和定位

台达PLC控制伺服电机实现原点回归和定位PLC是一种常用的工业自动化控制设备,可以通过编程实现对各种设备的控制和监测。
伺服电机是一种精密、高效的电机,常用于需要精确定位和高速运动的应用中。
在工业自动化中,使用台达PLC控制伺服电机实现原点回归和定位是一种常见的应用。
原点回归是指将伺服电机恢复到初始位置的过程。
定位是指将伺服电机定位到指定位置的过程。
下面将详细介绍如何使用台达PLC控制伺服电机实现原点回归和定位。
首先,需要连接PLC和伺服电机。
通常情况下,PLC通过数字I/O或者模拟输出的方式与伺服电机进行通信。
通过控制信号来实现对伺服电机的运动控制。
接下来,需要进行编程。
在PLC编程软件中,可以使用LAD(梯形图)或SFC(顺序功能图)等编程语言进行编程。
以下是使用LAD进行编程的步骤:1.设定伺服电机的回零信号:首先,将一个输入模块(通常是数字输入模块)连接到PLC,并将其配置为接收伺服电机的回零信号。
在PLC编程软件中,设置一个变量用来接收回零信号,并将其与输入模块的输入点相连。
2.设定伺服电机的运动控制信号:将一个输出模块(通常是数字输出模块)连接到PLC,并将其配置为输出伺服电机的运动控制信号。
在PLC编程软件中,设置一个变量用来控制运动控制信号,并将其与输出模块的输出点相连。
3.编写原点回归程序:在PLC编程软件中,使用LAD或SFC语言编写原点回归的程序。
程序中需要包含以下几个步骤:a.等待回零信号:使用一个等待指令,等待回零信号的到来。
当接收到回零信号时,程序将继续执行下一步。
b.发送运动控制信号:将设定好的运动控制信号发送给伺服电机,使其执行原点回归的动作。
c.等待回零完成信号:使用一个等待指令,等待回零完成信号的到来。
当接收到回零完成信号时,程序将继续执行下一步。
4.编写定位程序:在PLC编程软件中,使用LAD或SFC语言编写定位的程序。
程序中需要包含以下几个步骤:a.接收定位信号:使用一个等待指令,等待定位信号的到来。
台达plc控制伺服电机实现原点回归和定位
台达plc控制伺服电机实现原点回归和定位台达PLC 控制伺服电机实现原点回归和定位所有范例仅供初学者参考。
范例的目的仅仅是说明指令的用法!暂連XI【卞1紧急停止X7ffSxi!to【控制宴求】由PLC 和伺服电机组成一个系统iKJPLC 控制伺服电机,实现机构的原点回归、椰寸定位和绝对定位功能。
原点回归X2昂常XS 刘相对定位?I 绝对定掘自相对定位?:鲍对定位 o脉冲輪出伺服电机咼占后退 ----- --- A 前进 A JK .rA 、【元件说明】K2 XO Xl4 M1 M2 M3 M4HH-H H woH 原点回归指令执行箫件相对定位拷令1擠行衆件相对定傥楷令2执行条件 Ht M3XO X14 MO M1 M2 M4HHMOWF纶对定位楷专1执行条件X6 XO X14 MO Ml M2 M3Htl__11_II_1/1_H_H_l/l"M4纯竝定位指令2挾行兼怦-DZRN K100000 K50CJ0 X13Y0原点0 寸劫逬点脉进输归速度14 -DDRVI K1 00000K50000m Y1輛出脉冲于输出脉脉冲输旋转方向馥(正方向)冲烦率出装童信号瑜出■ DDRV1k-WOOQO K5Q000¥0Y1何服电机税行原点回白动祚何服电机枫行相对定位伺服电机执行相对定位i;轄滋SSI豔矍精DDRVA K5 00000Kwaooq Y0Y1DDRVA K10D0Kiaoaoo Y0Y1何服电机执行绝对足位F趟出出曲1编码器共有10根线与伺服驱动器的CN2连接连接器的接线端外型□按脚編号如F 图所示:91 Il=l l=l E=l 1=1 1=11□ EZ] □□ ICA/2连擾器(公》刊面接线端各信号的竜义说明如卜‘:Pin No 倚号名称端子记号'.;;L接头快速接头机能、说明 2 亿相轴入 /Z G Afi 编码轟忆相输出 4 /A 相输人;A B A2 編码魁/A 相输出 5 A #l I 输人 A A Ai 编码器A 相输出 7 B 相输人 B C A3编码器B 阳输出 9 IB 相输人IBD M编码器/B 相输出 10 Z 相输人Z F A5 编码器Z 相输出 14,16 编码器电源 +5V S A7 编码器用5V 电源13,15编科器电源GNDRAS接地[JO 口 === EH主机J2JN'<-v b ,~^~ 24GXI■Z^Z X3X4~歴「x&T7~运IDKI rxiX15xiF Jil? 22 ttVAC 監±dSAS DAIv+i-M O—a0*11Y □—■'—Q-Q--'*—B~5—11—o~o~~11—Gro—1-H^O—1相巧宅役毬廂斟■腿捏?耳总停止疋粹莊隔讦養饭怖旖圈丑黑-★近点僖号—*SRDY_ +苗FD—^TPO£—^ALAMre ~和a ■yiGN1VD0 I'COMH24V匚0Z 5ti吨24Z——盘瞰引爭点席引 .T'"□ 11 0加砧?钊DI4 g□IS 33 016 12'口区1。
台达PLC控制伺服电机实现原点回归和定位

台达PLC控制伺服电机实现原点回归和定位原点回归是指将伺服电机的位置重新回归到设定的原点位置。
定位是
指将伺服电机移动到指定的位置。
这两个功能通常需要使用伺服电机控制
器和编码器。
首先,我们需要在台达PLC程序中设置相关的参数和变量。
例如,我
们可以设置一个变量来记录伺服电机的位置,以及一个变量来存储原点位
置的位置。
同时,我们还需要设置一个变量来指示是否需要回归到原点或
移动到指定的位置。
接下来,在PLC程序中,我们需要编写一段代码来控制伺服电机的运动。
首先,我们需要判断是否需要回归到原点或移动到指定的位置。
如果
需要回归到原点,我们可以将伺服电机移动到原点位置,并将当前位置设
置为原点位置。
如果需要移动到指定的位置,我们可以将伺服电机移动到
指定位置,并将当前位置设置为指定位置。
在代码中,我们还需考虑到伺服电机的运动速度和加减速度等参数。
这些参数可以在PLC程序中进行设置,以确保伺服电机的运动平稳和精确。
此外,在代码中,我们还可以添加一些保护措施,例如限制运动范围、错误处理等,来增强系统的稳定性和可靠性。
在实际操作中,我们还需要进行一些调试和测试。
例如,我们可以通
过监视伺服电机的位置和状态来验证系统的运行是否符合预期。
如果有异
常情况,我们可以通过调整参数或修改代码来进行调试。
总结来说,通过合理设置参数和编写PLC程序,台达PLC可以控制伺
服电机实现原点回归和定位功能。
这样可以帮助我们在自动化生产线或机
械设备中更方便地控制和操作伺服电机,提高生产效率和质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验器材:ASDA-A2 DVP-20EH
定义外部端子(SHM)启动原点回归:PT PR模式下都可以,通过伺服内参数定义原点回归
1.原点回归的行走路径:下面的是分别是向前寻找Z脉冲和向后寻找Z脉冲,不管是什么品牌的伺服,原点回归的路径都一样
①.寻找不寻找Z脉冲(反向或者正向)3种
②.寻找零点(正方向或者反方向)(零点定义)2种
③.在一转的范围内寻找Z脉冲(正方向或者反方向)
000正反向寻找零点PL并返回寻找Z 010正反向寻找零点
PL正向回寻找Z
020正反向寻找零点PL不去
寻找Z
001反方向寻找零点NL并
返回寻找Z
011021 002正方向寻找零点
ORGOFF/ON为零点,返回寻找Z 012
022
003反方向寻找零点,
OFF/ON为零点,返回
寻找Z
013023
004在一圈范围正方向寻找零点
005在一圈范围反方向寻找零点
006正方向寻找零点
ORG,ON/OFF为零点,
返回寻找Z 016026
007反方向寻找零点ORG,
ON/OFF为零点,返回
寻找Z
017027
008直接定义原点以目前位置当做原点
2.P6-00参数定义
BOOT:驱动器启动时第一次server on时是否执行原点回归
0:不做原点回归
1:自动执行原点回归
DLY:延时时间的选择P5-40--P5-45
作用:?????
DEC1/DEC2:第一/二段回原点减速时间的选择P5-40--P5-55
ACC:加速时间的选择对应到P20--P35
PATH:路径的形式
0:原点回归后停止
1-63:原点回归后,执行指定的路径
作用:可以让电机回到原点后,再移动的位置
原点回归牵涉到的其它的参数:
P5-05:第一段高速原点回归速度的设定
P5-06:第二段高度原点回归速度的设定
P1-01:01 PR 64个命令程序,程序C#0为零为原点回归其它的为普通用户自定义程序
例子:P2-10:101 Server on Y0
P2-11:108 CTRG P2-11:127 SHM 启动原点回归Y1 P2-12:124 ORGP 原点Y2
P5-04:002 正方向寻找零点ORG,OFF/ON为原点,反方向寻找Z
P5-05:第一段高速原点回归速度设定
P5-06:第二段高速原点回归速度设定
这种情况下监控C-PUU不会为0,很有可能是因为找到Z脉冲时减速停止造成的
P5-04:23 反方向寻找零点ORG,ON/OFF为零点
P6-00: 02 回零完成后执行自定义程序2
这种情况下监控的C-PUU会为零
上面的情况就是回零后出现不是在零点的位置,有偏差:
A.A系列中的P1-47原点回归模式中可以设置拉回原点设置的选项,在A2中不提供,而是通过另一种方式实现的。
找到原点后,必须减速停止,停止的时候可定会超出原点一段距离,:
若不拉回可使P6-00的PATH为0
若拉回可使P6-00的PATH为为零,设置的路径为值为原点
B.新原点的设定方法为:
ORG_DEF(原点定义值)+S(希望移动的偏移量)=P(新原点)
P6-01(例如)
原点定义值:是找到Z脉冲后反运动方向拉回的脉冲个数
例如:12点钟的方向为Z脉冲点P1-01=101顺时针为正
PT模式下的原点回归:
API 156: ZRN S1 S2 S3 D
S1:寻找零点的速度
S2:DOG由OFF/ON的寸动速度
S3:近点信号
D:脉冲输出装置
按照说明书上的回零步骤为:以S1的速度,方向以Sign的正负寻找零点,在S3由OFF/ON电机由S3的速度离开接近开关直到电机ON/OFF
但是现在是一碰到接近开关就停止
以M5点作为近点信号(DOG)时,当碰到接近开关时以S3的速度离开接近开关,当X5由ON/OFF时,电机停止
实验现象2:
以X5点作为近点信号(DOG)时,碰到接近开关时就停止,我是以20EH,以不同的输入点为接近开关信号,都是这种现象,和说明ZRN指令的说明不同。
P2-08 10 参数复位在server off
P2-10---P2-17 恢复出厂设置时将P2-15---P2-17全设置为0就行了
1.先判断伺服的输出和PLC的输入是否正确
A.P4-6
2.判断伺服的输入和PLC的输出是否正确
A.P4-07 由外部输入端子触发显示
3.a接点是常开接点b接点是常闭接点
[此文档可自行编辑修改,如有侵权请告知删除,感谢您的支持,我们会努力把内容做得更好]。