经纬仪导线计算
井下经纬仪导线测量手簿计算方法

井下经纬仪导线测量手簿计算方法
井下经纬仪导线测量的手簿计算方法通常包括以下几个步骤:
1. 数据整理:首先,将测量得到的各个角度和边长的数据整理在手簿上。
每个角度应记录其度、分、秒的数值。
2. 角度计算:对于两个相邻的导线点,需要计算它们之间的水平角。
水平角的计算公式为:$\text{水平角} = \text{后视点角度} - \text{前视点角度}$。
注意,角度需要转换为同一度数单位(如度、分、秒),以便进行计算。
3. 边长测量:使用测距仪或钢卷尺测量两个相邻导线点之间的距离,并记录在相应位置。
4. 坐标计算:根据测量的角度和边长,以及已知的起始点的坐标,使用三角函数计算每个导线点的坐标。
常用的三角函数包括正弦、余弦、正切等。
5. 精度计算:根据测量的数据和计算的坐标,检查并计算导线的精度,以确保测量结果的准确性。
6. 手簿填写:将以上所有计算和检查结果填入手簿的相应位置,并确保所有数据准确无误。
7. 复核与审查:完成手簿填写后,进行复核和审查,确保所有数据和计算准确无误。
以上步骤是井下经纬仪导线测量手簿计算的基本方法。
具体的计算方法和公式可能因井下条件、测量精度要求等因素而有所不同,因此在实际操作中,应参考相关的测量规范和操作指南,以确保测量结果的准确性和可靠性。
测距经纬仪导线坐标平差计算

观测角
改正值
方位角
边长
△X
△Y
X 3234 003.353 3234 322.443
Y 500 179.044 500 122.391 500 078.340 500 137.143 500 168.605 500 230.046 500 213.256 500 250.299 500 285.335 500 279.051 500 213.818
6 7
3221 449.961 -134.348 -152.802
10
78.974
12
3221 315.623
10
23.897
11
3221 162.831 3221 060.157
-646.822
1 10124
计算者:
检查者:
日期: 2009 年 1 月 19 日
测距导线坐标平差计算表 测距导线坐标平差计算表
∑B =2028°44′44〞 f△B=+32〞 ∑S=1707.210 ∑△X=-1290.958 ∑△y=-268.242 f△x=-0.024 f△y=+0.140 1 -1290.934 f△B 允=±24√n=±24√12=±83〞
观测角 °′″ 357 30 48
改正值 ″ -3
方位角 °′″ 4 25 58
+2 +11
3234 201.229 -190.985 -321.759
+2
31.453 61.426
+9
3234 010.246
简述导线测量的的外业测量步骤及内业计算的主要公式

简述导线测量的的外业测量步骤及内业计算的主要公式
导线测量是一种常用的地理测量方法,通常用于测量地面上的距离、高度、角度等参数。
下面将介绍导线测量的外业测量步骤和内业计算的主要公式。
一、外业测量步骤:
1、布设基准点。
在测量区域内选取两个以上的基准点,并用经纬仪等仪器测定它们的坐标。
2、设置测站。
根据需要,在基准点的周围设置若干个测站,每个测站都需要用三角板等仪器测定其方位角。
3、拉设导线。
在相邻的两个测站之间拉设导线,测量线路长度和方向。
4、测量角度。
在每个测站上,用经纬仪等仪器测量每个导线的方位角和垂直角。
5、测量高差。
在相邻的两个测站之间测量高差。
6、记录数据。
将测量的数据记录在测量表格中。
二、内业计算主要公式:
1、导线长度计算公式:
L = √(ΔN²+ ΔE²+ ΔH²)
其中,ΔN、ΔE、ΔH分别为相邻两个测站的高程差、东坐标差和北坐标差。
2、方位角计算公式:
tan(α) = ΔE / ΔN,其中α为相邻两个测站的方位角。
3、垂直角计算公式:
sin(β) = ΔH / L,其中β为相邻两个测站的垂直角。
4、高差计算公式:
Δh = hi - hj + Li sin(β) - Lj sin(β')
其中,hi、hj为相邻两个测站的高程,Li、Lj分别为对应的测站间距离,β和β’为两个测站上的垂直角。
导线测量需要精确的仪器和操作,通常用于土地测绘、建筑测量等领域,对于测量操作人员的要求也较高。
论述经纬仪导线测量内业计算步骤注意事项及展点方法

论述经纬仪导线测量内业计算步骤注意事项及展点方法经纬仪是一种常用的测量仪器,用于测量地面上各个点的经纬度坐标。
经纬仪导线测量是一种测量方法,通过布置一系列的导线进行测量,以确定测量区域内各个点的位置,并计算出其经纬度坐标。
内业计算是指在野外测量后,将所得的数据进行处理和计算,以得出最终的测量结果。
内业计算步骤主要包括数据录入、数据处理、计算校核和结果评定。
在进行经纬仪导线测量内业计算时,需要注意以下几点:1. 数据的准确性:在进行数据录入时,要确保数据的准确性。
包括核对数据的每一位数值,避免出现错误的输入和计算。
2. 数据的有效性:在数据处理过程中,要筛选出有效的数据,将无效的数据进行排除。
无效数据可能是由于测量仪器误差、操作不当或环境影响等原因造成的。
3. 校正参数的选取:在进行数据处理时,需要选择合适的校正参数。
校正参数是用来修正仪器误差的重要参数,选择不合适的校正参数会影响测量结果的准确性。
4. 计算公式的正确性:在进行计算校核时,要确保所使用的计算公式是正确的。
任何错误的计算公式都会导致最终结果的错误。
为了提高经纬仪导线测量的准确性和效率,可以使用一些展点方法。
展点方法是指在测量区域内选择合适的位置,以提高测量的精度和可行性。
常用的展点方法包括:1. 中心展点:在测量区域的中心位置设置一个展点,以此为基准进行其他点的测量。
这样可以减小误差的累积,提高测量的精度。
2. 对称展点:根据测量区域的特点,选择一些对称位置进行展点。
通过对称测量可以提高测量的可行性和稳定性。
3. 网格展点:在测量区域内设置一定间距的网格点,以此作为测量点。
这种展点方法适用于较大的测量区域,可以提高测量的覆盖面积和效率。
综上所述,进行经纬仪导线测量内业计算时,需要注意数据的准确性和有效性,选择合适的校正参数和计算公式。
为了提高测量的准确性和效率,可以使用中心展点、对称展点和网格展点等方法。
导线测量
子学习情境2-5 经纬仪导线测量一、国家平面控制(锁)网的概念为了统一全国的测量工作,需要在我国九百六十多万平方公里的领土上,建立国家的控制网。
国家控制网的作用很多,但最主要是在测绘地形图中起控制作用。
地形图是分幅测绘的,这就要求测绘的各幅地形图能相互拼接而构成整体,且精度均匀。
因此,需要由国家有关部门,根据国家经济和国防建设的需要,全面规划,按照国家制定的统一测量规范,建立起国家控制网。
建立国家控制网的原则是分级布网,逐级控制。
国家控制网分为国家平面控制网和国家高程控制网,建立国家平面控制网的常规方法是三角测量和导线测量。
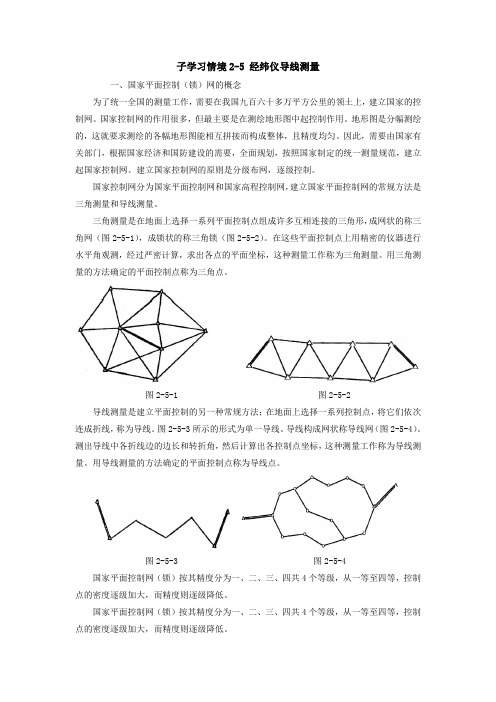
三角测量是在地面上选择一系列平面控制点组成许多互相连接的三角形,成网状的称三角网(图2-5-1),成锁状的称三角锁(图2-5-2)。
在这些平面控制点上用精密的仪器进行水平角观测,经过严密计算,求出各点的平面坐标,这种测量工作称为三角测量。
用三角测量的方法确定的平面控制点称为三角点。
图2-5-1 图2-5-2导线测量是建立平面控制的另一种常规方法;在地面上选择一系列控制点,将它们依次连成折线,称为导线。
图2-5-3所示的形式为单一导线。
导线构成网状称导线网(图2-5-4)。
测出导线中各折线边的边长和转折角,然后计算出各控制点坐标,这种测量工作称为导线测量。
用导线测量的方法确定的平面控制点称为导线点。
图2-5-3 图2-5-4国家平面控制网(锁)按其精度分为一、二、三、四共4个等级,从一等至四等,控制点的密度逐级加大,而精度则逐级降低。
国家平面控制网(锁)按其精度分为一、二、三、四共4个等级,从一等至四等,控制点的密度逐级加大,而精度则逐级降低。
一等三角锁是国家平面控制的骨干,一般沿经纬线方向构成纵横交叉的锁系,如图2-5-5所示。
纵横四个锁段构成锁环,每个锁段长约200 km。
在锁环中,隔一定距离选择一个控制点,用天文测量的方法,测定其经纬度作为锁中起算和检核的数据。
这种控制点又称为天文点。
导线测量的内业计算步骤

导线测量的内业计算步骤导线测量是一种常用的测量方法,通常用于测量长线路的长度和方向。
在进行导线测量时,我们需要进行一系列的内业计算,以获得准确的测量结果。
下面是导线测量的内业计算步骤:1.数据整理:首先,我们需要整理测量现场所收集到的数据。
这些数据包括测量仪器的读数、观测时间、观测者的姓名等。
对于每一次测量,都需要有一个对应的测量数据表格。
2.角度观测:导线测量需要测量线路的方向。
我们可以使用经纬仪、全站仪或其他测量仪器进行角度观测。
在进行角度观测时,需要注意观测的准确性和稳定性。
观测完成后,将观测到的角度记录在数据表格中。
3.距离观测:导线测量还需要测量线路的长度。
常用的测量仪器有钢卷尺、测距仪或全站仪。
观测距离时,需要注意测量仪器的准确性和稳定性。
观测完成后,将观测到的距离记录在数据表格中。
4.观测纠正:在进行角度观测和距离观测时,会受到很多误差的影响,比如大气折射误差、仪器误差等。
为了提高测量的准确性,需要对观测数据进行纠正。
纠正的方法有平差、角度和距离的纠正等。
5.计算导线线路:在进行导线测量时,我们通常是根据已知的基准点开始测量。
根据测量到的角度和距离观测值,我们可以计算出每个测量点的坐标。
通常情况下,第一个基准点的坐标为已知值,我们可以通过逐点计算的方法计算出其他测量点的坐标。
6.线路平差:在计算导线线路时,由于观测误差等原因,测量结果可能存在一定的误差。
为了提高测量结果的准确性,需要进行线路平差。
线路平差的目的是通过对观测数据进行分析和处理,使得测量结果更加接近真实值。
总结起来,导线测量的内业计算步骤包括数据整理、角度观测、距离观测、观测纠正、计算导线线路、线路平差和编制报告。
这些步骤的目的是通过对观测数据的处理和分析,得到准确的测量结果。
正确的内业计算是确保测量结果准确性的关键。
导线坐标计算的一般步骤是什么简答题

导线坐标计算的一般步骤是什么简答题导线坐标计算是在工程测量中常见的任务之一,它用于确定导线在空间中的位置坐标。
在工程测量中,导线坐标计算是一项非常重要的工作,它对于建筑、土木工程、电力工程等领域的设计和施工具有重要意义。
步骤一:建立坐标系在进行导线坐标计算之前,首先需要建立一个合适的坐标系。
坐标系可分为全站仪坐标系和局部坐标系两种形式。
全站仪坐标系通常使用大地坐标系或者笛卡尔坐标系,而局部坐标系则根据实际情况进行选择。
步骤二:测量导线的起点坐标在确定了坐标系之后,需要通过测量手段获取导线的起点坐标。
通常情况下,全站仪或者经纬仪是常用的测量工具。
通过使用这些工具,可以将导线的起点坐标精确地测量出来。
步骤三:测量导线的长度和角度测量导线的长度和角度是导线坐标计算中的关键步骤。
为了测量导线的长度,可以使用测距仪、测量软尺等工具。
而测量导线的角度则需要使用经纬仪、全站仪等仪器来完成。
步骤四:计算导线的坐标根据已知的起点坐标、长度和角度数据,可以使用三角测量法来计算导线的坐标。
三角测量法是一种常用的导线坐标计算方法,通过计算三角形的边长和角度来确定导线的坐标。
步骤五:检查计算结果一旦完成了导线坐标的计算,需要进行结果的检查。
检查的目的是确保计算结果的准确性和可靠性。
通常情况下,可以使用反算法对计算结果进行反算,然后与原始数据进行对比,以验证计算结果的正确性。
步骤六:记录和输出计算结果最后一步是将计算结果记录和输出。
记录计算结果是为了方便后续的数据处理和分析,同时也是工程测量的重要记录。
输出计算结果通常以表格或者图形的形式呈现,以便于人们的理解和使用。
综上所述,导线坐标计算的一般步骤包括建立坐标系、测量起点坐标、测量长度和角度、计算导线坐标、检查计算结果以及记录和输出计算结果。
这些步骤的执行需要仪器设备的支持和精确的测量操作,以保证计算结果的准确性和可靠性。
导线坐标计算在工程测量中具有重要的应用价值,可以为各种工程的设计和施工提供准确的基础数据。
测量学6小地区控制测量

二、国家控制 网的概念
为了统一全国各地区的测量工作,必须进行全国性的 控制测量,以建立国家控制网,供整个国民经济规划 和国防建设等使用。国家控制网分平面控制网和高程 控制网。
国家平面控制网
国家平面控制网主要是采用三角测量方法建立的,即 在全国范围内将控制点组成一系列的三角形,通过测 定所有三角形的内角,推算出各控制点的坐标。国家 控制网也是按照“由高级到低级、由整体到局部”的 原则布设的。国家平面控制网按其精度可分为一、二、 三、四等四个等级。
根据坐标方位角的定义,它是 从坐标轴北端开始顺时针旋转 至某边的水平角。因此有相同 端点的两条边,右侧边的坐标 方位角就等于左侧边的坐标方 位角加上两边之间的夹角,同 一条边的正反方位角相差180°。 即沿导线前进方向:
1
4
上式中包含具相同端点两条边 的方位角关系以及正反方位角 的关系。
2
3
5
α前=α后-180°+β左 =α后+180°-β右。
(四) 起始边方位角的测定
与高级已知点连接的导线,因有已知边方 位角,只需观测连接角便可以推算各边的 方位角,然后推算各点的坐标。对于不与 高级已知点相连接的闭合导线,则可用罗 盘仪测定一条起始边的磁方位角,便可推 算其他各边的方位角,并推算各点的坐标。
(五) 导线测量记录
导线测量的外业记录有规定的表格。
二、 经纬仪附合导线计算 附合导线计算角度闭合差和坐标增量闭合差的公式
不同。 (一) 角度闭合差的计算与调整
附合导线的角度闭合差为从一已知边方位角出发, 使用观测角推算至另一条已知边,推算方位角与已知 方位角之差。 (二) 坐标方位角的推算
推算出的已知边的坐标方位角应与已知值相同,以 此作为计算的检核。 (三) 坐标增量的计算 根据导线各边的方位角和边长,计算各坐标增量,计 算方法与闭合导线相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
48 43 18
115.10 100.09 108.32
-2 -2
+75.93 +86.50 +75.91 +86.52
+2
A 1 2 3 4 A
+2 +2
-66.54 +74.77 -66.56 +74.79 -97.04 -48.13 -97.06 -48.11
-2
94.38 +23.80 -91.33 +23.78 -91.32 67.58
解: α23= α12-β2±1800=800 1
30Λ 30Λ α12 β1 95Λ 95Λ
122Λ 122Λ
2ቤተ መጻሕፍቲ ባይዱ
β2
130Λ 130Λ
β3
65Λ 65Λ 128Λ 128Λ
3
β5
5
β4
α34= α23-β3±1800=1950 α45=2470 α51=3050
α 12=30 0(检查) 检查)
4
αA1 48Λ43Μ18Ν 48Λ43Μ18Ν βA
1
β1
97Λ03Μ00Ν 105Λ17Μ06Ν 2
A
β2
XA=536.27m YA=328.74m
112Λ22Μ24Ν
4
123Λ30Μ06Ν 101Λ46Μ24Ν β4
β3
3
1
(1)计算坐标增量闭合差: 计算坐标增量闭合差:
f x = ∑ ∆x 测 − ∑ ∆x 理 = ∑ ∆x 测 f y = ∑ ∆ y 测 − ∑ ∆y 理 = ∑ ∆y 测
43Λ17Μ12Ν 43Λ17Μ12Ν βB 180Λ13Μ36Ν αAB 180Λ13Μ36Ν XB=1230.88 A YB= 673.45
图表:附合导线坐标计算表 图表:
点 转折角 改正后 方位角 边 长 坐 标 增量(米) 号 (右) D 转折角 α Λ Μ Ν Λ Μ ΝΛ Μ Ν (米) ∆X ∆Y 改 正 后 坐标(米) 点 增量(米) 号 ∆X ∆Y X Y
A B 5 6 7 8 C D Σ
180 178 193 181 204 180 +8 13 36 180 +8 22 30 178 +8 44 00 193 +8 13 00 181 +8 54 30 204 +8 32 48 180
43 17 12
13 44 22 38 44 08 13 08 54 38 32 56
1
β1
97Λ03Μ00Ν
V∆yi = −
∑D
Di
αA1 48Λ43Μ18Ν 48Λ43Μ18Ν βA
A
XA=536.27m YA=328.74m
112Λ22Μ24Ν
105Λ17Μ06Ν 2
β2
ˆ ∆xi = ∆x + V∆xi ˆ ∆y i = ∆x + V∆yi
4
123Λ30Μ06Ν 101Λ46Μ24Ν β4
例题: 例题:附合导线的计算 (1)绘制计算草图, (1)绘制计算草图,在表内填写已知 绘制计算草图 数据和观测数据 (2)角度闭合差的计算与调整 (2)角度闭合差的计算与调整 (3)各边方向角的推算 (3)各边方向角的推算 (4)坐标增量闭合差的计算与调整 (4)坐标增量闭合差的计算与调整 (5)推算各点坐标。 (5)推算各点坐标。 推算各点坐标
43 03 28 124.08 44 40 50 164.10 30 56 42 208.53 29 43 34 94.18 4 48 56 147.44 4 16 00
-2 +2 +90.64 +84.73 +90.66 +84.71 1321.52 758.18 -2 +3 +116.68 +115.39 +116.66 +115.42 1438.18 873.60 -2 +3 +178.85 +107.23 +178.83 +107.26 1617.01 980.86 -1 +2 +81.79 +46.70 +81.78 +46.72 1698.79 1027.58 +2 -2 +146.92 +12.38 +146.90 +12.40
2、坐标正算公式
由A、B两点边长DAB和坐标方位角αAB,计算坐标 两点边长D 和坐标方位角αAB, 增量。见图有: 增量。见图有:
∆XAB =DAB × cos αAB ∆YAB =DAB × sin αAB 其中, 其中,∆XAB=XB-XA ∆YAB=YB-YA
0 X
∆YAB ∆XAB αAB DAB
(1)计算角度闭合差: 计算角度闭合差:
ƒβ=Σβ测-Σβ理 (n-2)×180Λ = Σβ测-(n-2)×180Λ
αA1 48Λ43Μ18Ν 48Λ43Μ18Ν βA
1
β1
97Λ03Μ00Ν 105Λ17Μ06Ν 2
A
β2
(2)计算限差: 计算限差:
XA=536.27m YA=328.74m
112Λ22Μ24Ν
αA1 48Λ43Μ18Ν 48Λ43Μ18Ν βA
97Λ03Μ00Ν 105Λ17Μ06Ν 2
β1
A
β2
导线全长闭合差: 导线全长闭合差:
f = f + f
2 x 2 y
XA=536.27m YA=328.74m
112Λ22Μ24Ν
4
123Λ30Μ06Ν 101Λ46Μ24Ν β4
β3
3
导线全长相对闭合差(relative 导线全长相对闭合差(relative length closing error of traverse): f K= = 1 / XXX ∑D
f β允 = ±40" n
4
123Λ30Μ06Ν 101Λ46Μ24Ν β4
β3
3
(3)若在限差内,则平均分配原则,计算改正 若在限差内,则平均分配原则, 数:
Vβ = − fβ n
αA1 48Λ43Μ18Ν 48Λ43Μ18Ν βA
1
β1
97Λ03Μ00Ν 105Λ17Μ06Ν 2
A
β2
(4)计算改正后新 的角值: 的角值:
1230.88 673.45
B 5 6 7 8 C
1845.691039.98
5
B XC=1845.69 YC=1039.98 C D 16Μ00Ν 4Λ16Μ00Ν
αCD
βC 180Λ32Μ 180Λ32Μ48
8 7
β4 204Λ54Μ30Ν 204Λ54Μ30Ν
β2 193Λ44Μ00Ν 193Λ44Μ00Ν β1 178Λ22Μ30Ν 178Λ22Μ30Ν
6
β3 181Λ13Μ00Ν 181Λ13Μ00Ν
β3
3
6、坐标计算
根据起始点的已知坐标和经改正的新的坐标增量, 根据起始点的已知坐标和经改正的新的坐标增量, 来依次计算各导线点的坐标。 来依次计算各导线点的坐标。
1
ˆ x2 = x1 + ∆x12 ˆ y2 = y1 + ∆y12
97Λ03Μ00Ν Λ Μ Ν
β1
αA1 48Λ43Μ18Ν 48Λ43Μ18Ν βA
讲题: 讲题:导线测量内业计算
内容提要:
6.3 经纬仪导线计算
导线的内业计算——计算各导线点的坐标 ——计算各导线点的坐标
(一)几个基本公式 1、坐标方位角(grid bearing)的推算 坐标方位角(grid bearing)的推算
α 前 = α 后 + β 左 ± 180
或: α 前 = α 后 − β 右 ± 180
(2)分配坐标增量闭合差。 分配坐标增量闭合差。
K<1/2000(图根级),则将f ),则将 以相反符号, 若K<1/2000(图根级),则将fx、fy以相反符号,按 边长成正比分配到各坐标增量上去。 边长成正比分配到各坐标增量上去。并计算改正后的坐标 增量。 增量。
V∆xi fx =− Di ∑D fy
K=
ΣD
= 4000 <
1
1 2000
例题: 例题:
用EXCEL程序进行闭合导线计算 程序进行闭合导线计算
(四)附合导线平差计算
说明:与闭合导线基本相同,以下是两者的不同点: 说明:与闭合导线基本相同,以下是两者的不同点:
1、角度闭合差的分配与调整 方法1 方法1:
(1)计算方位角闭合差: f α = α 终计算 − α 终已知 计算方位角闭合差: (2)满足精度要求,若观测角为左角,则将fα反符号 满足精度要求,若观测角为左角 则将f 左角, 平均分配到各观测角上;若观测角为右角,则将fα同 右角, 平均分配到各观测角上;若观测角为右角 则将f 符号平均分配到各观测角上。 符号平均分配到各观测角上。 平均分配到各观测角上
(2)满足精度要求,将fβ反符号平均分配到各观测角上。 满足精度要求, 反符号平均分配到各观测角上。
2、坐标增量闭合差的计算
f x = ∑ ∆x 测 − ∑ ∆x 理 = ∑ ∆x 测 − ( x 终 − x 始 ) f y = ∑ ∆y 测 − ∑ ∆y 理 = ∑ ∆y 测 − ( y终 − y 始 )
AB
= yB − y A
(2)计算:α AB锐 计算:
= arctg
∆y AB ∆x AB
(3)根据∆XAB、∆YAB的正负号判断αAB所在的象限。 根据∆ AB、 的正负号判断α 所在的象限。
(三)闭合导线平差计算步骤