自控作业答案-第三章
《自动控制原理》---丁红主编---第三章习题答案
习题3-1.选择题:(1)已知单位负反馈闭环系统是稳定的,其开环传递函数为:)1(2)s )(2+++=s s s s G (,系统对单位斜坡的稳态误差是:a.0.5 b.1 3-2 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+001251253-3 一阶系统结构图如图3-45所示。
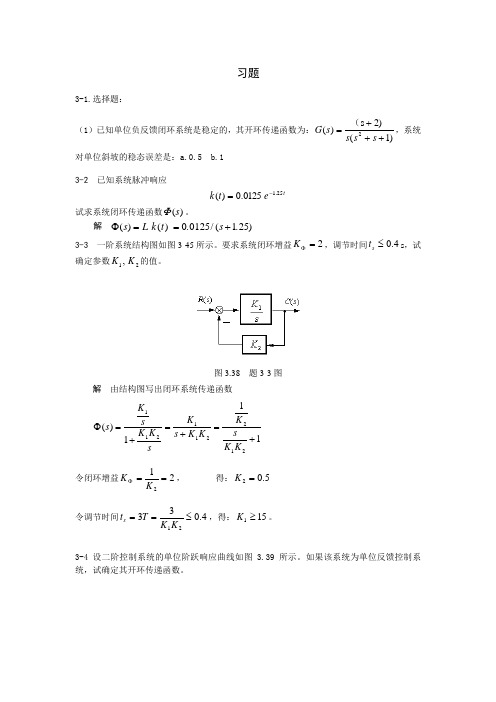
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
图3.38 题3-3图解 由结构图写出闭环系统传递函数111)(212211211+=+=+=ΦK K sK K K s K sK K s K s令闭环增益212==ΦK K , 得:5.02=K 令调节时间4.03321≤==K K T t s ,得:151≥K 。
3-4 设二阶控制系统的单位阶跃响应曲线如图 3.39 所示。
如果该系统为单位反馈控制系统,试确定其开环传递函数。
图3.39 题3-4图 解:由图2.8知,开环传递函数为3-5 设角速度指示随动统结构图如图3-40所示。
若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K 应取何值,调节时间s t 是多少?图3-40 题3-5图解:依题意应取 1=ξ,这时可设闭环极点为02,11T -=λ。
写出系统闭环传递函数Ks s Ks 101010)(2++=Φ 闭环特征多项式20022021211010)(⎪⎪⎭⎫ ⎝⎛++=⎪⎪⎭⎫ ⎝⎛+=++=T s T s T s K s s s D 比较系数有 ⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎫ ⎝⎛=K T T 101102200 联立求解得 ⎩⎨⎧==5.22.00K T 因此有 159.075.40''<''==T t s3-6 图3.41所示为某控制系统结构图,是选择参数K 1和K 2,使系统的ωn =6,ξ=1.3-7 已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。
自动控制原理第三章课后习题答案

3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。
自动控制原理课后习题答案,第三章(西科技大学)
c(t ) 1
1
e
n t
1
2
sin(d t )(t 0)
1.6,
1 2
1.25,n 1.2 1.6 1.25 2, 0.6
n
d
1 2
s% e
1 2
tp 1.96s d
10 K 斜坡输入时: K v lim sG ( s ) s 0 10 1 ess 1 Kv 0.25 得:10 1 2.5K 稳态误差:
与二阶系统的典型形式对比,有
10 1 2n 10K
得:K=1.6,= 0.3,n=4
闭环传递函数为
(2)
则辅助方程的解为
s1.2 1
s3.4 5 j
劳斯表第一列出现了负数,系统不稳定。第一列元素符号变 化一次,可知系统存在一个s右半平面的特征根。系统有一 共轭纯虚根±5 j。
K (0.5s 1) 3-11 已知单位反馈系统的开环传函为G ( s) 2 s(s 1)(0.5s s 1) 试确定系统稳定时的K值范围。
系统稳定的 K 范围为 0 < K < 1.708。
100 3-15 已知单位反馈系统的开环传递函数 G பைடு நூலகம் s ) s ( s 10) 试求:
(1) 位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka; (2) 当参考输入 r(t) = 1+ t + at2 时,系统的稳态误差。
解:(1)
-50
48
0 0 0 8 96 8 48 2 96 8 ( 50 ) 2 0 2 24 50 s 8 8 0 s1 24 96 8 ( 50 ) 112 .7 24 0 s -50
自动控制原理第三章课后习题答案(免费)

自动控制原理第三章课后习题答案(免费)3-1判别下列系统的能控性与能观性。
系统中a,b,c,d 的取值对能控性与能观性是 否有关,若有关其取值条件如何?rankU c = 4,所以系统不完全能控,讨论系统能控性a 0 0 0] 乍L-b0 0 0x =x +1 1-c 0 0<0 01 d 丿<0jY = (0 0 1 0)x[-a,0,1,0]T,A 2B = [a 2,0, -a -3 33= [-a,0, aac c ,-a -c -d]判断能控型:U cAB A 2B A 3B「1 0<0-a0 1 0 23a-a 0 02 .. 2-a - c a ac c1「a -c 「d(1)系统如图所示。
解:状态变量:L X = ax u L X 2 - -bx 2L X 3 = x 1 X 2 - CX 3 LX 4 = X3 dX 4题3-1( 1)图系统模拟结构图u由此写出状态空间: B 二[1,0,0,0]T,ABT 3C,1] ,A BrC 、r 00 1 0、 判断能观性:u 0 =CA1 1 -c 0 CA 2—2 c_a _c—b —c 03」2丄 丄2>a +ac+c2 2b +bc + c2-c °」rankU 。
= 4,所以系统不能观(2)系统如图所示。
X iy = 10 x1 -a+b' Uc=[B,AB] =Q —c —d 丿若 a-b-c-d -b=0,贝U rankU c 二 2,系统能控.U o'c iCA 丿 l _a0 b;若b = 0,则rankU 。
=2,系统能观. (3)系统如下式:fX 1C1 1 0、 *'2 1 A * X2=0-10X2+ a 0 u* 3 0 -2.<b 0」E 丿5〕=c 0d 、X 2A 丿<00 0」g解:系统如下: a解:状态变题3-1 (2)图系统模拟结构图(3)求取对角标准型,1 1 ' …-4 1 1 1 ',P-b2 d -1> P - 1-1 1 0LX = 0 -1 0X 2+<00 -2 ) 0若a =0,b = 0,系统能控. 若c = 0,d = 0 ,系统能观. 3-2时不变系统:• '-3 1 )竹1「1 <试用两种方法判别其能控性与能观性。
自控第三章答案

K
p
不稳定
稳定
0
K
d
不稳定
不稳定
临界阻尼轨迹: D ( s ) s 4 K d s 4 K
2 p
0 出现重根时
p
临界阻尼条件为: 即: K
2 d
4 K
2
2 d
4 4K
0 线。
K p , 以纵轴为对称轴的抛物 K K
2 d 2 d
过阻尼区: 欠阻尼区: K
B3.15 分析图B3.15所示的两个系统,引入与不引入反馈时 系统的稳定性 。
解 不引入反馈 显然不稳定。 引入反馈 D ( s ) s ( s 1 )( s 5 ) 10 ( s 1 ) 0 闭环稳定。 (s ) 10 ( s 1 ) s ( s 1 )( s 5 )
3
赫尔维茨判据: 9 100 D2 20 1 100 9 80 0
1 20 4 100
2
1
0
故系统是稳定的。
(3)s4+4s3+13s2+36s+K=0
解
(1 ) 劳思判据: s s s s s
4
1 4 4 36 K K
13 36 K K
K 0
3
2
1
0
若系统稳定,则
36 K 0 0 K 36 K 0
( 2 )由
G (s )
7(s 1) s ( s 4 )( s 2 s 2 )
2
0 . 875 ( s 1 ) s ( 0 . 25 s 1 )( 0 . 5 s s 1 )
2
可知系统为
1
型的,于是
自控-第三章作业答案-超调量计算

作业3-11,3-12,3-15.。
参考答案(知识点:二阶振荡系统的动态特性指标计算)3-11已知系统结构如图所示,求:(1) 4K =,0,τ=时系统参数,?n ωζ=,性能指标%,?s t σ=(2) 如果要求0.707?0K ζτ===,,其中(3) 4K =,为改善性能加s τ使%5%σ<,求τ=?习题3-11系统结构图(1) K s s K s G s G s ++=+=Φ2)(1)()(=)0,4(,2222==++τωζωωK s s nn n 2==K n ω,25.021==n ωζ %47%100%21=⨯=--ζζπσe 36s n t s ζω==,⎪⎪⎩⎪⎪⎨⎧===⇒===⇒=5.021********n n n n K K ωωζωζω (2) K s s K s G s G s ++=+=Φ2)(1)()()707.0,0,(,2222==++=ςτωζωωK s s nn n 求 5.0)707.021(707.01222=⨯==⇒⎭⎬⎫==n n K ωζζω; (3) )41(4)1(41)1(4)(ττ++=+++=s s s s s s s s G k ,24144s s s τΦ=+++()() 457.0412707.024*******=-⨯⨯=-=⇒⎩⎨⎧=+=n n n ζωτωτζω 注意:教材树P73最佳阻尼比的定义:0707ς=.时,系统的最大超调量435πσ-=<.%%%=e ,1.3调节时间最短,即平稳性和快速性最佳。
本题的启示:(1)求得原系统的超调量47σ=%%非常大,(2)为了降低超调<5%,降低了开环增益K 。
(注意:求解稳态误差时,为了提高精度,可以增大开环增益。
当设计者进行系统参数设定时,需要兼顾动静态指标) (3)为了降低超调<5%,在前向通道环节引入了微分环节。
3-12已知系统的单位阶跃响应曲线如图所示,求系统的闭环传递函数。
自动控制理论第三章习题答案

=
600
=
600
=
ω
2 n
s(s + 60)(s + 10)
s(s 2 + 70s + 600)
s(s 2
+
2ξω n s
+
ω
2 n
)
显然闭环传递函数为
ω
2 n
(s2
+
2ξω n s
+
ω
2 n
)
其中
ω
2 n
=
600
ωn = 10 6
2ξωn = 70
根据(3-17)
h(t) = 1 + e−t /T1 + e−t /T12 T2 / T1 − 1 T1 / T2 − 1
(1) k(t) = 0.0125e−1.25t
(2) k(t) = 5t + 10sin(4t + 450 )
(3) k (t) = 0.1(1 − e−t / 3 )
解:
(1) Φ(s) = 0.0125 s + 1.25
1
胡寿松自动控制原理习题解答第三章
(2) k(t) = 5t + 10sin 4t cos 450 + 10 cos 4t sin 450
ξ2 −1 = 6 = 1+
ξ2 −1
1−
1
−
1 ξ2
1
−
1 ξ2
解方程得ξ = 7 26
由 T1
=
ωn (ξ
1 −ξ
2
− 1)
=
1 10
得到ωn (ξ − ξ 2 − 1) = 10
所以 ω n
自控 王建辉 答案 第三章

3.2 作业答案题3-10一单位反馈控制系统的开环传递函数为)1(1)(+=s s s W k试求:(1) 系统的单位阶跃响应及性能指标;,,%,μσ和s r t t (2) 输入量x r (t )= t 时,系统的输出响应;(3) 输入量x r (t) 为单位脉冲函数时,系统的输出响应。
解:(1)系统的闭环传递函数为)2()1(1)(2n nk s s s s s W ξωω+=+= 其闭环传递函数为: 11)(1)()(2++=+=s s s W s W s W k k B 与标准形式相对比,可得12=n ω 1=n ω; 12=n ξω 5.021==ξ 866.02312==-=ξωωn d 系统的单位阶跃响应为:)3866.0sin(15.11)()sin(11)(5.02πθωξξω+-=+--=--t e t y t e t y t d t n1.81%*100%*100%16.4%e e δ-==≈2.24r t s =≈s t ns 63%)5(=≈ξω;s t ns 84%)2(=≈ξωs w t df 26.72==π(5%)60.826(5%)7.26s f t u t === *(2)当输入量为t t x r =)(时,求系统的输出响应。
根据传递函数的定义,利用拉氏变换和拉氏反变换进行计算 输入量的拉氏变换为 21)(ss X r =,则 22222222222)23()21(2331)23()21(21111111111)(++-++++-+=+++-+=+++++=++=s s s s s s s s s s s s DCs s Bs A s s s s X c将上式进行拉氏反变换,等到系统的输出响应为:t e t e t t x t t c 23sin 3323cos1)(5.05.0---+-= (3) 当输入量)()(t t x r δ=时,求系统的输出响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3-7 设下图是简化的飞行控制系统结构图,试选择参数1K 和
t K ,使系统的6n ω=,1ξ=。
解:通过简化上图所示的结构图,得到系统的闭环传递函数为:
1
2
1125()(0.825)25t K s s K K s K Φ=+++
将上式与二阶系统的传递函数额标准形式:
2
2
2()2n
n n s s s ωξωωΦ=++
相比较可得:
2
11250.8252n t n K K K ωξω⎧=⎪⎨+=⎪⎩
将6n ω=,1ξ=代入上述方程组并解之可得:
1 1.44
0.31t
K K =⎧⎨=⎩ 3-14 已知系统结构图如下图所示。
试用劳斯稳定判据确定能使系统稳定的反馈参数τ的取值范围。
解:由上图的结构图求得系统闭环传递函数为:
3
2()10(1)()()(110)1010C s s s R s s s s τ+Φ==++++
系统的特征方程为:
32
(110)10100s s s τ++++=
列劳斯表如下:
3
s 1 10 2
s 110τ+ 10
1
s
100110ττ+
s
10
由劳斯稳定判据可知:要使系统稳定,必须满足如下条件:
11001000110ττ
τ
+>⎧⎪
⎨>⎪+⎩ 解之得:0τ
>
所以,使系统稳定的反馈参数τ的取值范围为0τ>。
3-15 已知单位反馈系统的开环传递函数:
(1)100
()(0.11)(5)G s s s =++;
(2)50
()(0.11)(5)G s s s s =++。
求输入分别为()2r t t =和2
()22r t t t =++时,系统稳态误差。
解:
(1)10020
()(0.11)(5)(0.11)(0.21)G s s s s s ==++++
由上式可知,该系统是0型系统,且20K =。
0型系统在
2
11(),,2
t t t 信号作用下的稳态误差分别为:1
,,1K
∞∞+。
根据线性叠加原理有该系统在输入为()2r t t =时的稳态误差为12ss e =∙∞=∞,该系统在输入为2
()22r t t t
=++时的稳态误差为21
221ss e K =∙
+∙∞+∞=∞+。
(2) 5010
()(0.11)(5)(0.11)(0.21)G s s s s s s s ==++++
由上式可知,该系统是I 型系统,且10K
=。
I 型系统在
2
11(),,2
t t t 信号作用下的稳态误差分别为:1
0,,K
∞。
根据线性叠加原理有该系统在输入为()2r t t =时的稳态误差为1
1
20.2ss e K
=∙=,该系统在输入为2()22r t t t =++时的稳态误差为21202ss e K
=++∞=∞。