非线性动力系统之二阶系统习题
非线性动力学导论讲义02(二阶系统简介)-岳宝增 (1)

的单参数曲线族;称为系统的相图,这些曲线称为相轨线。
此外,(5b)式还表示系统有如图所示的2 π 周期性;还有
.
轨线的方向性(后面讨论)。给定一对值(x,y)或(x,x ) 则对应相图上的某一点P,称为系统的一个状态。某一状态 给出了某一特定摆角为x时其角速度为x =y,这两个变量 正是我们某一特定时刻观察摆的摆动时所感知的对象的量 化表示。对给定的一对值(x,x )亦可以作为微分方程的 初始时刻;因此,任一给定的状态可以确定所有其后续的 状态,而这些状态都位于通过P(x,y)点(初始状态)的相 轨线上。上图中用箭头标定了随着时间的变化,轨线应行 进的方向;该方向可由方程(5a)确定: 当y>0时,则x >0,所以x必然随着t的增加而增大;这表明 在上半平面轨线的方向必须是从左到右;同理,在下半平
关于x积分得:
2 2
2
cos x C x
(3)
其中C是任意的常数。注意到,上面的方程表示系统任 一特定运动的能量守恒关系;这是因为,如果将(3) 两端乘以mʟ2,则: 1 2 2
2
mgl cos x E ml x
其中E是另一任意的常数,上式符合如下形式: E=m的动能+m的势能; 并且任意特定的E值对应于一特定的自由(单摆)运动。 由(3)式中的x 可由x表出:
.
2 x 2(C cos x)
(4)
这是关于x(t)的一阶微分方程。该方程的解不能用初等 直接揭示其解的特性。引入新的变量y,定义如下:
函数表示;我们下面将不通过求解方程而是由方程(4)
yy sin x x
2
(5a) (5b)
则由方程(4)可表示为:
y 2(C 2 cos x)
(完整版)自动控制原理课后习题及答案
第一章 绪论1-1 试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1) 优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+ (4)()2()()sin dy t y t u t tdt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++= (6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dt dt =++⎰解答: (1)线性定常 (2)非线性定常 (3)线性时变 (4)线性时变 (5)非线性定常 (6)非线性定常 (7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
考研必备之自动化专业 自控原理第八章 非线性系统部分习题答案
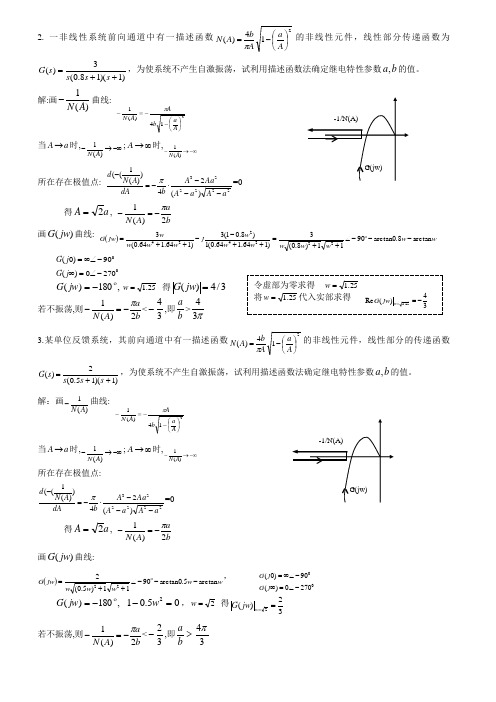
2. 一非线性系统前向通道中有一描述函数214)(⎪⎭⎫ ⎝⎛-=A a A b A N π的非线性元件,线性部分传递函数为)1)(18.0(3)(++=s s s s G ,为使系统不产生自激振荡,试利用描述函数法确定继电特性参数b a ,的值。
解:画)(1A N -曲线: 214)(1⎪⎭⎫⎝⎛--=-A a b AA N π当a A →时,-∞→-)(1A N ;∞→A 时,-∞→-)(1A N所在存在极值点:222223)(24))(1((aA a A Aa A b dA A N d ---⋅-=-π=0 得a A 2=, ba A N 2)(1π-=-画)(jw G 曲线: ()w w w w w w w w j w w w w jw G arctan 8.0arctan 9011)8.0(3)164.164.0(1)8.01(3)164.164.0(32224224---∠++=++--++=02700)(90)0(-∠=∞-∞∠=j G j G,180)( -=jw G 25.1=w 得3/4)(=jw G若不振荡,则baA N 2)(1π-=-<34-,即b a >π34 3.某单位反馈系统,其前向通道中有一描述函数214)(⎪⎭⎫ ⎝⎛-=A a A b A N π的非线性元件,线性部分的传递函数)1)(15.0(2)(++=s s s s G ,为使系统不产生自激振荡,试利用描述函数法确定继电特性参数b a ,的值。
解:画)(1A N -曲线:214)(1⎪⎭⎫⎝⎛--=-A a b AA N π当a A →时,-∞→-)(1A N ;∞→A 时,-∞→-)(1A N所在存在极值点:222223)(24))(1((a A a A Aa A b dA A N d ---⋅-=-π=0 得a A 2=, ba A N 2)(1π-=-画)(jw G 曲线:()w w w w w jw G arctan 5.0arctan 9011)5.0(222---∠++=, 002700)(90)0(-∠=∞-∞∠=j G j G ,180)( -=jw G 05.012=-w ,2=w 得32)(2==w jw G若不振荡,则baA N 2)(1π-=-<32-,即>b a 34π4. 已知非线性系统的结构图如图所示非线性系统图中非线性环节的描述函数为N A A A A ()()=++>62试用描述函数法确定:(1)使该非线性系统稳定、不稳定以及产生周期运动时,线性部分的K值范围; (2)判断周期运动的稳定性,并计算稳定周期运动的振幅和频率。
非线性物理 习题部分答案

由图可能进入混沌状态了 -------------------------------------------------------------
dU 0 2 x 3 2 x 0 (丢掉常系数) x x 0 dx
-------------------------------------------------------------------------------3. (照猫画虎;照虎画猫?)
2 )x x0 x ( x2 x
2 2 2 x 1 x y 1 (1 x y ) bxn n+2 n 1 n+1 n n 2 yn+2 bxn+1 b(1 xn yn ) 2 2 xn+2 xn 1 (1 xn yn ) bxn 2 y y b (1 x n n yn ) n+2 2 2 x 1 (1 x y ) bxn n n n 2 yn b(1 xn yn )
x0 0 ac x0 a0 ab
a. 在 x 0 平衡点附近做微扰,坐标有偏离,偏离量为
x x0 x ; x 代入方程
dx x(a c abx) dt
d (a c ab ) (丢掉常系数)得到 dt d (a c) ab 2 ,忽略二阶小量得到 dt d d dt (a c) ;分离变量积分得到 (a c) dt d (a c)dt
d ln (a c)dt ln (a c)t A e( a c )t A
e( a c )t A Ae( a c )t
二阶非线性微分方程求解例题

二阶非线性微分方程求解例题例:求y ′ ′ + y = c o s 2 x + 2 s i n x 的通解例:求y''+y= cos{2x}+2sinx 的通解例:求y′′+y=cos2x+2sinx的通解解:∵β 1 ̸= β 2 解:\because \beta_1ot= \beta_2 解:∵β1=β2∴将方程式y ′ ′ + y = c o s 2 x + 2 s i n x \therefore 将方程式 y''+y= cos{2x}+2sinx ∴将方程式y′′+y=cos2x+2sinx拆成y ′ ′ + y = c o s 2 x 与y ′ ′ + y = 2 s i n x 两个二阶常系数非齐次微分方程。
拆成y''+y= cos{2x} 与 y''+y=2sinx两个二阶常系数非齐次微分方程。
拆成y′′+y=cos2x与y′′+y=2sinx两个二阶常系数非齐次微分方程。
⇒其特征方程 r 2 = 1 = 0 的根为 ± i \Rightarrow 其特征方程r^2=1=0的根为\pm i ⇒其特征方程r2=1=0的根为±i易知:y ′ ′ + y = 0 的通解为: Y = C 1 c o s x + C 2 s i n x 易知:y''+y= 0的通解为:Y=C_1cosx+C_2sinx 易知:y′′+y=0的通解为:Y=C1cosx+C2sinx1 ) 1) 1) y ′ ′ + y = c o s2 x y''+y= cos{2x} y′′+y=cos2x⇒ α = 0 ; β = 2 ; s = m a x [ m , n ] = 0 \Rightarrow \alpha=0; \beta=2; s=max[m,n]=0 ⇒α=0;β=2;s=max[m,n]=0∵ α ± β i = ± 2 i 不是特征方程的根 \because \alpha \pm \beta i=\pm2i不是特征方程的根∵α±βi=±2i不是特征方程的根∴令 : y ∗ = a 0 c o s 2 β + b 0 s i n 2 β \therefore令 :y*=a_0cos2\beta+b_0sin2\beta ∴令:y∗=a0cos2β+b0sin2βy ∗ ′ = − 2 a 0 s i n 2 β + 2 b 0 c o s 2 β y*'=-2a_0sin2\beta+2b_0cos2\beta y∗′=−2a0sin2β+2b0cos2βy ∗ ′ ′ = − 4 a 0 c o s 2 β − 4 b 0 s i n 2 β y*''=-4a_0cos2\beta-4b_0sin2\beta y∗′′=−4a0cos2β−4b0sin2β⇒将 y ∗ , y ∗ ′ , y ∗ ′ ′ 代入原方程求解得: a 0 = 1 3 ; b 0 = 0 \Rightarrow 将y*,y*',y*'' 代入原方程求解得:a_0=\frac{1}{3}; b_0=0 ⇒将y∗,y∗′,y∗′′代入原方程求解得:a0=31;b0=0∴ y ∗ = 1 3 c o s 2 x \therefore y*=\frac{1}{3}cos{2x}∴y∗=31cos2x2 ) y ′ ′ + y = 2 s i n x 2) y''+y= 2sinx 2)y′′+y=2sinx⇒ α = 0 ; β = 1 ; s = m a x [ m , n ] = 0 \Rightarrow \alpha=0; \beta=1; s=max[m,n]=0 ⇒α=0;β=1;s=max[m,n]=0∵ α ± β i = ± i 是特征方程的一对单共轭复根\because \alpha \pm \beta i=\pm i是特征方程的一对单共轭复根∵α±βi=±i是特征方程的一对单共轭复根∴令 : y ∗ = x ( a 1 c o s β + b 1 s i n β ) \therefore令 :y*=x(a_1cos\beta+b_1sin\beta) ∴令:y∗=x(a1cosβ+b1sinβ)⇒将 y ∗ , y ∗ ′ , y ∗ ′ ′ 代入原方程求解得:a 0 = − 1 ; b 0 = 0 \Rightarrow 将y*,y*',y*'' 代入原方程求解得: a_0=-1; b_0=0 ⇒将y∗,y∗′,y∗′′代入原方程求解得:a0=−1;b0=0∴ y ∗ = − x c o s x \therefore y*=-xcosx ∴y∗=−xc osx综上:y ′ ′ + y = c o s 2 x + 2 s i n x 的通解为综上:y''+y= cos{2x}+2sinx 的通解为综上:y′′+y=cos2x+2sinx的通解为y = C 1 c o s x + C 2 s i n x + 1 3 c o s 2 x + − x c o s x y= C_1cosx+C_2sinx+\frac{1}{3}cos{2x}+-xcosx y=C1cosx+C2 sinx+31cos2x+−xcosx。
应用数学方向,动力系统第三章非线性微分方程动力系统的简化
第三章非线性微分方程动力系统的简化在非线性微分方程动力系统研究中,很自然地期望有一些有效的方法使原系统降阶或简化,井能保持原系统的动态特性。
目前,现有的知识主要有中心流形、范式、奇异摄动及精确线性化等。
本章将简要地叙述相关方面的基本内容3.1中心流形3.1.1中心流形的基本定理本节考虑以下形式非线性微分方程系统Equation Section 3(3.1) 其中,假定和是具有相应维数的常数矩阵,并且的所有特征值具有零实部,的所有特征值具有负实部。
函数和关于其变元皆二阶连续可微,且;(注:f'和是它们各自的雅可比矩阵)。
定义3.1一个集合(流形)被称为系统(3.1)的局部不变流形(Local invariant manifold)是指,对任何的系统(3.1)的初值为的解始终在集合S内,其中,为某正数。
进而,如果,,那么S就称为不变流形(invariant manifold)。
定义3.2如果是系统(3.1)的一个不变流形,并且为光滑函数,,,那么它被称为中心流形(centre manifold)。
对于系统(3.1),我们有,定理3.1 对系统(3.1)而言,若,,和满足假设条件,那么存在一个中心流形,其中(δ为某一个正数),且。
证今为函数,取值为又设其中。
首先,将证明系统(3.2)有一个中心流形,充分小。
让为一类李氏函数的集合:该类函数具有李氏常数,和。
于是,在采用上确界范数时,是一个完备空间。
对,,设是以下方程的解:(3.3) 同时,定义一个新的函数如下(3.4)于是,如果是(3.4)的一个不动点的话,就是(3.2)的一个中心流形。
为证明(3.4)不动点的存在,可以从求证对和充分小的,是上的压缩映射而得到。
根据与G的定义,存在一个连续函数,且,使得(3.5) 对所有成立。
因为所有特征值具有负实部,所以存在正常数和C:同样,由于的所有特征具有零实部,对每个常数总存在常数,使得且如果那末就可以利用(3.4)来估计G和类似项,以下总假设。
非线性物理试题及答案

非线性物理试题及答案一、单项选择题(每题2分,共10分)1. 非线性光学中,光的二次谐波产生属于:A. 线性效应B. 非线性效应C. 量子效应D. 热效应答案:B2. 以下哪项不是非线性动力学系统的特点?A. 存在混沌现象B. 系统行为对初始条件敏感C. 系统行为可预测D. 存在分叉现象答案:C3. 非线性系统方程中,以下哪项是正确的?A. \( \frac{dx}{dt} = ax \)B. \( \frac{dx}{dt} = ax^2 \)C. \( \frac{dx}{dt} = ax + bx^2 \)D. \( \frac{dx}{dt} = ax + bx^3 \)答案:D4. 非线性系统中,孤立波解是指:A. 波形随时间不变B. 波形随时间变化C. 波形随空间变化D. 波形随时间和空间变化答案:A5. 非线性物理中,Bose-Einstein凝聚态描述的是:A. 电子气B. 费米子气C. 光子气D. 玻色子气答案:D二、填空题(每题2分,共10分)1. 在非线性光学中,光的____效应可以产生频率为原始光频率两倍的光。
答案:二次谐波2. 非线性动力学系统中的____现象是指系统在某些参数变化时,会出现多种可能的行为模式。
答案:分叉3. 非线性系统的方程通常包含____项,这使得系统的行为复杂化。
答案:非线性4. 非线性系统中的____波是一种在传播过程中保持形状不变的波。
答案:孤立5. 在非线性物理中,____凝聚态是一种在低温下,玻色子粒子聚集在最低能态的现象。
答案:Bose-Einstein三、简答题(每题5分,共20分)1. 简述非线性物理中孤子的概念及其物理意义。
答案:孤子是一种在非线性介质中传播的波,它能够保持其形状和速度不变,即使在与其他孤子相遇时也不会发生能量交换。
孤子的物理意义在于它们展示了非线性系统中的局部化波解,这在光学、流体力学等领域有重要的应用。
2. 解释非线性动力学系统中的混沌现象及其特点。
非线性控制系统分析(第八章)

c(t ) c10 e c20 e 由初始条件决定。当取初始条件使 或 , c10 , c 20 c10 0 则相轨迹为 或 ;而在其它情况下,由于特征 c20 0 根 远离虚轴,故第二项很快衰减,系统运动过程特别是过 c s2 c c s c 1 渡过程的后期主要取决于第一项。这一结果与相平面分析的 s2 结果一致。
s1
s2
a a 4b 2
0
a a2 4b 2
0
s1 , s 2 为两个符号相反的互异实根,系统相平面图见下张图。
13
Байду номын сангаас
三、相平面法(17)
由图可见,图中两条特殊的等倾线是相轨迹,也是其它相轨 迹的渐近线,此外作为相平 面的分隔线,还将相平面划 分为四个具有不同运动状态 的区域。当初始条件位于 c s2 c 对应的相轨迹,系 统的运动将趋于原点,但只 要受到极其微小的扰动,系 统的运动将偏离该相轨迹, 并最终沿着c s1 c对应的相 轨迹的方向发散 至无穷。 因此 b 0 时,线性二阶系统的运动是不稳定的。 14
15
dc
a
三、相平面法(19)
3)b 0 。取 a /(2 b ) ,并分以下几种情况加以分析: ① 0 1 。系统特征根为一对具有负实部的共轭复根。 系统的零输入响应为衰减振荡形式。取 =0.5, n 1, 运用等倾线法绘制系统的 相轨迹如右图所示。相 轨迹为向心螺旋线,最 终趋于原点。
f ( x, x ) a x
7
三、相平面法(11)
4)一般地,等倾线分布越密,则所作的相轨迹越准确。 但随所取等倾线的增加,绘图工作量增加,同时也使 作图产生的积累误差增大。为提高作图精度,可采用 平均斜率法,即取相邻两条等倾线所对应的斜率的平 均值为两条等倾线间直线的斜率。