机械原理课设1
牛头刨床机械原理课程设计1点和6点

目录一、概述1、课程设计的题目2.、课程设计的任务和目的3、课程设计的要求4、课程设计的数据二、机构简介与设计数据三.课程设计的内容和步骤§2.1、拆分杆组§2.2、方案分析§2.3、程序编写过程§2.4、程序说明§2.5、C语言编程及结果§2.6、位移,速度,加速度图三、小结四、参考文献一、概述1.课程设计的题目此次课程设计的题目是:牛头刨床的主传动结构的设计. 2.课程设计的任务和目的1)任务:1 牛头刨床的机构选型、运动方案的确定;2 导杆机构进行运动分析;3 导杆机构进行动态静力分析;4.飞轮设计;5.凸轮机构设计。
2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。
其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
.3.课程设计的要求牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。
尽量是设计的结构简单,实用,能很好的实现传动功能。
二.机构简介与设计数据1,机构简介牛头刨床是一种用于平面切削加工的机床,如图4-1。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
机械原理课程设计20篇
第13章 机械原理课程设计题目汇编近几年来,随着机械原理课程教学改革的不断深入,机械原理课程设计的重点应放在机械系统运动方案的构思和设计上,以激发和培养学生的创新意识和创新设计能力,这已成为共识。
本书从这一认识出发,并根据《机械原理课程教学基本要求》中对机械原理课程设计提出的要求,汇编了二十个课程设计题目,供教师选用和参考。
13.1 四工位加工机床的刀具进给系统和工作台转位系统设计(1) 功能要求及工艺动作分解提示 1) 总功能要求实现对工件的装卸、钻孔、扩孔、铰孔。
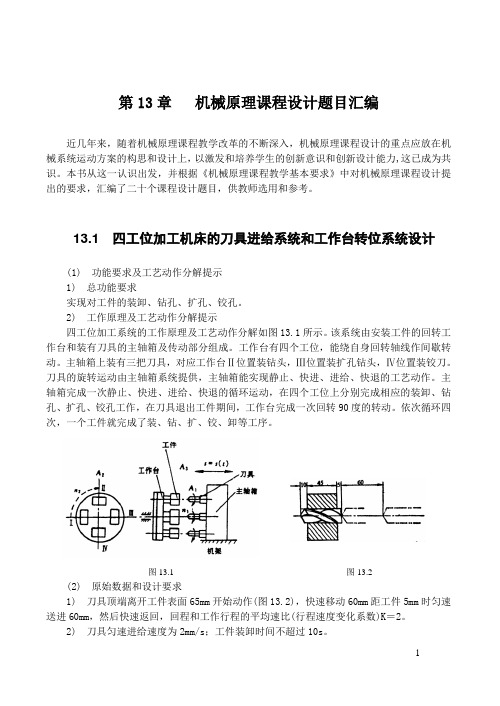
2) 工作原理及工艺动作分解提示四工位加工系统的工作原理及工艺动作分解如图13.1所示。
该系统由安装工件的回转工作台和装有刀具的主轴箱及传动部分组成。
工作台有四个工位,能绕自身回转轴线作间歇转动。
主轴箱上装有三把刀具,对应工作台Ⅱ位置装钻头,Ⅲ位置装扩孔钻头,Ⅳ位置装铰刀。
刀具的旋转运动由主轴箱系统提供,主轴箱能实现静止、快进、进给、快退的工艺动作。
主轴箱完成一次静止、快进、进给、快退的循环运动,在四个工位上分别完成相应的装卸、钻孔、扩孔、铰孔工作,在刀具退出工件期间,工作台完成一次回转90度的转动。
依次循环四次,一个工件就完成了装、钻、扩、铰、卸等工序。
(2) 原始数据和设计要求1) 刀具顶端离开工件表面65mm 开始动作(图13.2),快速移动60mm 距工件5mm 时匀速送进60mm ,然后快速返回,回程和工作行程的平均速比(行程速度变化系数)K =2。
2) 刀具匀速进给速度为2mm/s ;工件装卸时间不超过10s 。
图13.1 图13.23) 生产率为每小时约74件。
(3) 运动方案构思提示1) 工作台的间歇转动可采用槽轮机构、不完全齿轮机构,曲柄摇杆棘轮机构、蜗杆凸轮间歇机构、圆柱凸轮间歇机构等。
2) 主轴箱的移动可采用移动推杆圆柱凸轮机构、移动推杆盘形凸轮机构、摆动推杆盘形凸轮与摇杆滑块机构、曲柄滑块机构、带滑块的六杆机构等。
机械原理课程设计

机械原理课程设计
在机械原理课程设计中,我们将使用一台小型汽车发动机作为研究对象,并设计一个能够模拟汽车运动的机械装置。
这个装置将包括几个主要部分,分别是发动机、传动系统和车轮。
首先,我们将以发动机为中心展开设计。
发动机是汽车的核心组件,它通过燃烧燃料产生动力,驱动车辆前进。
我们将模拟发动机的工作原理,使用气缸、活塞和曲轴等零部件来展示内燃机的工作过程。
通过控制燃料的供给和排气的开关,我们能够控制发动机的转速和输出功率。
其次,我们需要设计传动系统,将发动机产生的动力传递给车轮。
传动系统通常包括离合器、变速器和传动轴等部件。
离合器用于分离发动机和变速器之间的传动,变速器则可以根据需求调整车辆的速度和扭矩输出。
传动轴将动力传递到车轮上,使车辆能够前进或后退。
最后,我们需要设计车轮和悬挂系统,以便车辆能够平稳地行驶。
车轮通常由轮毂、轮胎和刹车器组成,它们通过悬挂系统与车身相连。
悬挂系统可以减震和支撑车身,以提供舒适的驾驶体验。
通过模拟这一完整的机械系统,在课程设计中我们可以深入理解机械原理的运作方式。
同时,我们还可以通过调整各个部件的参数和结构,进行优化设计,以提高整个系统的性能和效率。
通过这样的设计过程,我们能够更好地理解机械原理的实际应用,并培养我们的设计能力和创新思维。
高中化学机械原理教案人教版
高中化学机械原理教案人教版
一、教学目标
1. 理解机械原理的概念和基本规律;
2. 掌握机械原理中的常见概念和术语;
3. 能够运用机械原理解决实际问题。
二、教学重点
1. 机械原理的基本概念和原理;
2. 机械原理的常见应用。
三、教学内容
1. 机械原理的概念和分类;
2. 施力、受力的基本规律;
3. 机械工作原理的应用。
四、教学过程
1. 引入
通过讲解日常生活中的机械原理现象引入本课内容,激发学生对机械原理的兴趣。
2. 概念讲解
解释机械原理的概念和分类,介绍施力、受力的基本规律。
3. 案例分析
通过案例分析机械原理在实际生活中的应用,引导学生思考和讨论。
4. 练习
设计相关练习让学生巩固所学知识,提高解决问题的能力。
5. 总结
对机械原理的重点内容进行总结,并鼓励学生深入思考和实践。
六、教学反思
本课程通过引入案例和实际问题,加深学生对机械原理的理解和认识,培养学生解决问题的能力和思维方式。
同时,教学内容设计生动有趣,将抽象的概念与实际生活联系起来,使学生更易理解和接受。
机械原理课时教案高中化学

机械原理课时教案高中化学
课程内容:高中化学
课时安排:1课时
教学目标:
1. 了解机械原理的基本概念和重要性;
2. 掌握常见的机械原理的应用;
3. 培养学生的动手能力和解决问题的能力。
教学重点:
1. 机械原理的基本概念;
2. 机械原理的应用。
教学难点:
1. 机械原理的应用;
2. 解决实际问题。
教学准备:
1. 讲义、PPT等教学工具;
2. 实验器材:简易杠杆、秤盘等。
教学过程:
一、导入(5分钟)
教师引导学生回顾物理学中的简单机械原理,如杠杆、轮轴、滑轮等的概念和应用。
二、讲解(10分钟)
1. 讲解机械原理的定义和分类;
2. 讲解简易机械原理的应用和意义。
三、实验操作(15分钟)
1. 小组合作,使用简易杠杆对不同重量的物体进行举起;
2. 记录实验数据,分析实验结果。
四、讨论(10分钟)
1. 学生展示实验结果,进行讨论和交流;
2. 引导学生思考机械原理在日常生活中的应用。
五、总结(5分钟)
1. 总结本节课的重点和难点;
2. 强调机械原理的重要性和应用价值。
六、作业布置(5分钟)
1. 完成课后练习册上与机械原理相关的习题;
2. 搜集相关的案例,并思考机械原理在其中的应用。
教学反思:
通过本节课的教学,学生对机械原理有了初步的了解和认识,培养了学生的动手能力和解决问题的能力。
下一节课将进一步深入讲解机械原理的应用和实际案例。
铁板输送机构机械原理课程设计1
机械原理课程设计课题名称:铁板输送机构目录一设计课题二工作原理三题目分析四机构的运动方案分析和选择4.1 机构的运动方案分析4.2 绘制运动循环图4.3 运动方案的选择五轮系的分析和计算六附加机构(铰链四杆机构)设计6.1 杆长尺寸计算6.2 四连杆机构的运动分析七剪断机构的分析7.1 机构的尺寸计算7.2 机构的运动分析八总结九附录9.1 四连杆机构运动分析源程序9.2 剪断机构运动分析源程序一设计课题一、工作原理及工艺动作过程将卷料展开并剪成一定长度铁板的剪板机,可以有两种剪断方式。
一种方式是板料匀速连续送进,剪刀在和铁板同步(同速)前进的运动中剪断铁板,即飞剪机。
另一种是将板料做定长度的间歇送进,在板料短暂的停歇时间内,剪刀在一定位置上将铁板剪断,本题要求做后一种剪断方式的机构方案设计。
二、原始数据及设计要求(1) 原材料为成卷的板料。
每次输送铁板长度为L=1900或2200mm(设计时任选一种)。
(2) 每次输送铁板到达规定长度后,铁板稍停,以待剪板机构将其剪断。
剪断工艺所需时间约为铁板输送周期的十五分之一。
建议铁板停歇时间不超过剪断工艺时间的1.5倍,以保证有较高的生产率。
三、设计要求输送机构运转应平稳,振动和冲击应尽量小(即要求输送机构从动件的加速度曲线连续无突变)。
二工作原理利用附加曲柄摇杆机构实现连续转动。
利用两个辊轮将铁板压紧,依靠辊轮和铁板间的摩擦力将铁板从卷料上拉出并推向前进的输送方式,如图:所以在主动曲柄AB(齿轮1)等速转动,系杆H变速运动的一周内,齿轮4在某一时间内总能使其角速度为零。
在主动曲柄AB(齿轮1)等速转动一周的时间内,从动齿轮4按下述规律运动:当曲柄开始转过某一角度时间内时,齿轮4停歇不动,以等待剪切机构将铁板剪断;在主动曲柄转过一周中其余角度时,输出构件4转过另一角度,这时刚好将铁板输送到所要求的长度L。
三题目分析因为要求剪断工艺所需时间约为铁板输送周期的十五分之一,故设机构的停歇时间是铁板输送周期的十二分之一。
机械原理课程设计受电弓
机械原理课程设计受电弓一、教学目标本节课的教学目标是让学生了解和掌握受电弓的机械原理,包括其结构、工作原理和维护方法。
知识目标要求学生能够描述受电弓的主要组成部分,解释受电弓的工作原理,以及列举受电弓的维护方法。
技能目标要求学生能够通过实验或模拟操作,展示受电弓的工作过程,并能够进行简单的维护和故障排除。
情感态度价值观目标则是培养学生的创新意识和解决问题的能力,使他们对机械原理产生兴趣,并意识到机械原理在现代科技中的重要性。
二、教学内容本节课的教学内容主要包括受电弓的结构、工作原理和维护方法。
首先,我们将介绍受电弓的主要组成部分,如滑板、弹簧、气压装置等,并解释各部分的作用。
接着,我们将详细讲解受电弓的工作原理,包括受电弓与电线之间的接触、电力传输过程以及受电弓的升起和降下。
最后,我们将介绍受电弓的维护方法,包括日常检查、清洁和润滑等。
三、教学方法为了激发学生的学习兴趣和主动性,我们将采用多种教学方法进行授课。
首先,我们将运用讲授法,以生动的语言和形象的比喻,为学生讲解受电弓的结构和工作原理。
其次,我们将采用讨论法,引导学生分组讨论受电弓的维护方法,并鼓励他们提出问题和解决问题。
此外,我们还将运用案例分析法,通过分析实际案例,使学生更好地理解和掌握受电弓的工作原理和维护方法。
最后,我们将学生进行实验操作,让他们亲身体验受电弓的工作过程,提高他们的实践能力。
四、教学资源为了支持教学内容和教学方法的实施,我们将选择和准备适当的教学资源。
教材方面,我们将使用《机械原理》一书,作为学生学习的基础资料。
参考书方面,我们将推荐《现代机械设计手册》等书籍,以丰富学生的知识储备。
多媒体资料方面,我们将准备受电弓工作原理的动画演示和实际操作视频,以直观地展示受电弓的工作过程。
实验设备方面,我们将准备受电弓模型和相关的实验器材,让学生能够进行实际操作和观察。
通过这些教学资源的运用,我们将丰富学生的学习体验,提高他们的学习效果。
机械原理课程设计凸轮机构设计说明书
全面探究凸轮机构设计原理及方法凸轮机构是一种常用的机械传动装置,通过凸轮和摆杆的配合组成,具有可逆性、可编程性和高精度的特点。
本文将从设计原理、设计方法和优化策略三个方面探究凸轮机构设计的要点。
一、设计原理
凸轮机构的设计原理是在摆杆与凸轮配合时,摆杆可以沿凸轮轮廓实现规定的运动规律,如直线运动、往返运动和旋转运动等。
凸轮可以根据运动轨迹、运动频率和运动速度等要求,通过凸轮轮廓的设计来完成。
凸轮轮廓的设计包括了初步设计、动力学分析、运动规划等步骤。
二、设计方法
凸轮机构的设计方法包括手工绘图及设计软件辅助。
手工绘图是传统的凸轮轮廓设计方法,适用于简单的凸轮机构,如往复式转动机构、转动转动机构等;而对于复杂的凸轮机构,可以利用计算机辅助设计软件,如ProEngineer、CATIA、AutoCAD等,进行三维建模、运动模拟和优化设计。
此外,对于凸轮机构的设计还需要考虑到强度计算、可靠性分析等相关问题。
三、优化策略
凸轮机构的设计优化策略主要包括凸轮轮廓的形状优化、摆杆的长度优化和机构传动效率的优化等。
凸轮轮廓的形状优化通常是通过
Cycloid、Involute、Bezier等曲线的拟合来实现;摆杆的长度优化可以通过数学模型来建立,利用遗传算法、粒子群算法等优化算法进行
求解;传动效率的优化可以通过轮廓优化、材料优化、润滑优化等途
径来进行。
凸轮机构的设计是机械工业中非常重要的一环,它涉及到运动学、动力学、力学等多个学科的知识,需要学习者在多方面进行深入研究
和实践。
通过对凸轮机构的深入探究,我们可以更好地理解机械原理
的精髓,提高机械设计的水平和能力。
机械原理教案
机械原理教案一、引言。
机械原理是机械工程专业的重要基础课程,它主要研究机械运动的规律和性能,是机械设计、制造和维修的理论基础。
本教案旨在通过系统的教学安排和生动的案例分析,帮助学生全面深入地理解和掌握机械原理的基本概念和重要原理,提高学生的学习兴趣和学习效果,为学生今后的专业学习和工作奠定坚实的基础。
二、基本概念。
1. 机械原理的定义。
机械原理是研究机械运动的规律和性能的科学,它是机械工程的基础学科,也是机械设计、制造和维修的理论基础。
2. 机械原理的研究内容。
机械原理主要研究机械运动的基本规律,包括运动的描述、运动的变换、力的作用、力的分析等内容。
三、重要原理。
1. 运动的描述。
机械运动可以分为直线运动和旋转运动,直线运动可以用位移、速度和加速度来描述,旋转运动可以用角位移、角速度和角加速度来描述。
2. 运动的变换。
机械运动可以通过齿轮、带传动、连杆机构等方式来实现运动的变换,不同的机构可以实现不同的运动变换。
3. 力的作用。
机械运动需要受到外力的作用才能实现,力的作用可以通过力的分解和合成来分析和计算。
4. 力的分析。
机械运动中的力可以通过牛顿定律和动力学原理来进行分析,力的大小和方向可以通过力的平衡和力的合成来确定。
四、教学方法。
1. 理论教学。
通过讲授机械原理的基本概念和重要原理,帮助学生建立起系统的理论知识体系。
2. 实践教学。
通过实验和案例分析,帮助学生深入理解和掌握机械原理的实际应用,培养学生的动手能力和创新意识。
3. 互动教学。
通过课堂讨论和互动问答,激发学生的学习兴趣,提高学生的学习积极性,促进师生之间的良好互动。
五、教学安排。
1. 第一周,机械原理基本概念的讲解和理论分析。
2. 第二周,机械运动的描述和变换的实验教学。
3. 第三周,力的作用和分析的案例分析和讨论。
4. 第四周,机械原理的综合应用和实践操作。
六、教学评价。
1. 学生考核。
通过平时作业、实验报告和期末考试等方式对学生进行全面的考核,评价学生的学习成绩和学习效果。
课程思政方案及实施案例(机械原理与设计(一))
机械原理与设计(一)课程思政方案及实施案例
一、素质目标
1)具有追求真理、实事求是、勇于探究与实践的科学精神;
2)养成良好的自我学习和信息获取能力;
3)提升学生创新设计能力;
4)良好的交流、沟通、与人合作的能力
三、实施案例
案例1:机器与机构
以单缸四冲程内燃机为例,它属于动力机器,该机器内含三种机构:曲柄滑块机构、凸轮机构、齿轮机构。
其中由缸体、活塞、连杆、和曲轴组成曲柄滑块机构,当燃气在缸体内腔燃烧膨胀而推动活塞移动时,通过连杆带动曲轴围绕其轴线转动,从而实现了从移动到时转动运动形式的转换。
这三种机构按照一定的时间顺序相互协调、协同工作,将燃油燃烧的热能转变为曲轴转动的机械能,从而使这台机器输出旋转运动和驱动力矩,成为能做有用功的机器。
通过该环节的教学实施,可以培养学生一丝不苟、互相配合、注重团队的工匠精神。
案例2:前段时间因为韩国部署萨德导弹事件引发空前的爱国热潮,我也在思考如何在课堂中引入这一事件,激发学生的爱国心,激发学生对机械专业的热爱。
萨德导弹就是军工机械,从机械大概念来说就是机械,在我教学的机械原理与设计课程中,在教学内容引入后,与学生一起讨论,一起学习,起到了良好的爱国主义教育效果,也促进了学生进一步学好机械专业的决心和信心。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、数据流程图
|
五、主要参数
起点坐标(x , y)长度l,宽度b,高度h,两图间距离j
六、参考文献
[1]姚大鹏栾好利张翼英等编著《C语言程序设计教程习题与上机实训》
北京:中国水利水电出版社2006
[2]谭浩强《C语言程序设计(第三版).》北京:清华大学出版社2005
[3]陈文博朱青《数据结构与算法[M]》.北京:机械工业出版社2007
printf("heng zuo biao x:(40<x<70):\n");
scanf("%d",&x);
printf("zong zuo biao y:(40<y<70):\n");
scanf("%d",&y);
printf("liang tu jian ju li j:(60<j<80):\n");
3.画出边框和标题栏。
二、设计思路
1、根据显示器适配器,在稿纸上预先设计好尺寸,根据位置关系,计算出各点的坐标,并做好记录。
2、写程序。开始调用图形函数库,用#include”graphics.h”以及函数库# include"stdio.h".
3、定义一结构体命名为canshu,成员为a ,b,c,d,e。
2、getch()字符输入函数
3、FILE用来保存参数的文件,*p指向文件的指针
4、Int l,b,h,j;分别定义长度,宽度,高度,和两图形间的距离
5、Save()文件保存函数,fopen()文件打开函数,fclose()文件关闭函数
6、Cleardevice()清屏函数
7、Setbkcolor()屏幕背景颜色设置函数,setcolor()直线颜色设置函数,setlinestyle()直线线型设置函数,rectangle()绘制矩形函数,settextstyle()调用出字体形式,用outtextstyle()输入相应的数据。
九总结…………………………………….10
一、设计题目
题目绘制机械图
要求:
.1.完成绘制右面机械图(包括主视图、左视图、俯视图,参数自拟)。
2.机械图为参数化设计,主视图完全根据键盘输入的尺寸参数绘制,左视图和俯视图根据主视图坐标变换获得,主视图未表达的信息再次输入尺寸参数在相应的左视图和俯视图中予以完善。并将键盘输入信息存入文件,以便再次绘制此图。
沈阳理工大学材料科学与工程学院计算机 Nhomakorabea序训练任务书
姓名周跃
班级07050101
学号09
日期:2009/06/11
一设计题目……………………….……….3
二设计思路…………………………….......3
三基本函数明……………………………...3
四数据流程……………………………….4
五主要参数……………………….……...5
按照此方法依次画出,左视图,俯视图!
7、画圆circle(x,y, r),(x, y)处为圆心,r为半径,规定线型为setlinestyle(0,0,1)。
8、画出外边框线型为setlinestyle(0,0,1),画出内边框线型为setlinestyle(0,0,3)。
9、用line命令画出标题栏,用settextstyle(DEFAULT_FONT,HORIZ_DIR,1);调用出字体形式用outtextstyle输入相应的数据,outtextstyle(x,y,””””)用法是在x,y处确定字体矩阵的起始点,””””是想输入的内容。
int h;
int j;
int x,y;
}canshu;
void main()
{FILE *fp; /*指向文件的指针*/
int x,y;
int l,b,h,j;
void save();
int gdriver=DETECT,gmode;
initgraph(&gdriver,&gmode,"c:\\tc");
[4]麻志毅《c语言解析教程.》北京:机械工业出版社2008
[5] C编写组编。《常用C语言用法手册》北京:龙门书局1995
七、程序源代码
#include"graphics.h" /*图形模式*/
#include"stdio.h"
struct canshu /*结构体参数列表*/
{int l;
int b;
scanf("%d",&j);
printf("chang du l:(150<l<250):\n");
scanf("%d",&l);
printf("gao du h:(100<h<160):\n");
scanf("%d",&h);
canshu.x=x;canshu.y=y;canshu.j=j;canshu.l=l;canshu.b=b;canshu.h=h;
printf("if you want to input,please press y,if you want to call save file ,press any key!\n");
if (getch()=='y')
{
printf("please inout the canshu x,y,l,b,h,j:\n");
六参考文献...................................................5
七程序源代码...............................................6
八图形标注...................................................9
三、所用到的基本函数说明
1、void main()函数:此函数实现的 是画出机械图的主视图,左视图,俯视图,边框线,标题栏,并输入标题栏的内容和实线程序保存功能。此函数通过绘图函数setlinestyle(),setbkcolor(),setcolor()规定运行环境的背景色,且规定了各图的线型,线的颜色,线的宽度和坐标法实现的画图功能,调用了直线绘图函数line(),矩形绘图函数rectangle()等
4、写主函数,用文件来保存输入的参数列,定义各参数的区间。
5、定义屏幕背景色为setbkstyle()。
6、用line ,circle命令画出完整的图形
画主视图,线型为实线,红色。屏幕左上角作为图的坐标原点的。Line(x0,y0,x1,y1)运用方法是,x0,y0处输入直线一个端点,x1,y1处输入直线另外一个端点。