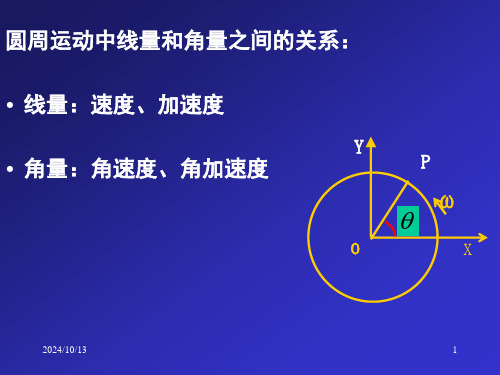
线量与角量的关系
第3讲 圆周运动的角量描述

第四节圆周运动及其描述上一节学习了一般的平面曲线运动,本节学习一种特殊且常见的曲线运动――圆周运动。
1 圆周运动的线量描述回顾上一节,我们在自然坐标系下使用了位置、速度、加速度等量来描述曲线运动。
这些量称为线量,所以上一节对于曲线运动的描述称为线量描述。
由于圆周运动是一种特殊的曲线运动,因而上一节关于曲线运动的描述完全适用于圆周运动的描述。
所以可以把上一节的结论直接用于圆周运动的线量描述。
位置:s=s(t)速度:dsdt v=τ加速度:22d sdtτ=aτ(1a)2nvR=a n(1b)(1b)式中的R就是圆的半径,而v则是质点做圆周运动的速率。
质点作圆周运动时,如果切向加速度为0,就是所谓的匀速圆周运动......。
2 圆周运动的角量描述极坐标系2.1 角位移除了线量描述形式外,对于圆周运动还有一种常用的描述形式――角量描述。
如图1所示,以圆心为极点,沿着任意方向引出一条线作为极轴,就建立了一个坐标系,称为极坐标系。
在极坐标系中,质点的位置所对应的矢径r与极轴的夹角θ称为质点的角位置,而dθ称为dt时间内的角位移。
注意:1,角位移...d.θ.既有大小,又有方向.........(.但未必是矢量......1)。
其方向由右手定则确定,即:伸出右手,使四指沿着质点旋转的方向弯曲,与四指垂直的拇指所指的方向1矢量的严格定义是:矢量是在空间中有一定的方向和数值,并遵从平行四边形加法法则的量。
即为d θ的正方向。
2,有限大小的角位移不是矢量(因为角位移的合成不符合交换律,比如翻一本书:先x->90,再y ->90,最后z ->90得到的结果,与先x->90,再z ->90,最后y ->90得到的结果不一样),只有..当△..t . .0.时,角位移.....d .θ.才是矢量....。
3,质点作圆周运动时,其角位移只有两种可能的方向,因此可以在标量前...............................加正号或者是负号来指明角位移的方向.................。
大学物理学习知识重点(全)

y第一章 质点运动学主要内容一.描述运动的物理量 1. 位矢、位移和路程由坐标原点到质点所在位置的矢量r r称为位矢位矢r xi yj =+r v v ,大小 r r ==v 运动方程()r r t =r r运动方程的分量形式()()x x t y y t =⎧⎪⎨=⎪⎩位移是描述质点的位置变化的物理量△t 时间内由起点指向终点的矢量B A r r r xi yj =-=∆+∆r rr r r△,r =r△路程是△t 时间内质点运动轨迹长度s ∆是标量。
明确r ∆r 、r ∆、s ∆的含义(∆≠∆≠∆rr r s ) 2. 速度(描述物体运动快慢和方向的物理量)平均速度 x y r x y i j i j t t tu u u D D ==+=+D D r r r r r V V r 瞬时速度(速度) t 0r dr v lim t dt∆→∆==∆r r r(速度方向是曲线切线方向) j v i v j dt dy i dt dx dt r d v y x ϖϖϖϖϖϖ+=+==,2222y x v v dt dy dt dx dt r d v +=⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛==ϖϖ ds dr dt dt=r 速度的大小称速率。
3. 加速度(是描述速度变化快慢的物理量)平均加速度va t ∆=∆rr 瞬时加速度(加速度) 220limt d d r a t dt dt υυ→∆===∆r r r r △ a r方向指向曲线凹向j dty d i dt x d j dt dv i dt dv dt v d a y x ϖϖϖϖρϖ2222+=+== 2222222222⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=+=dt y d dt x d dtdv dt dv a a a y x y x ϖ二.抛体运动运动方程矢量式为 2012r v t gt =+r rr分量式为 020cos ()1sin ()2αα==-⎧⎪⎨⎪⎩水平分运动为匀速直线运动竖直分运动为匀变速直线运动x v t y v t gt 三.圆周运动(包括一般曲线运动) 1.线量:线位移s 、线速度dsv dt= 切向加速度t dva dt=(速率随时间变化率) 法向加速度2n v a R=(速度方向随时间变化率)。
大学物理学C基本内容

《大学物理学C 》课程基本内容第一章 质点的运动1.直角坐标系、极坐标系、自然坐标系※2.质点运动的描述:位置矢量r、位移矢量r ∆=)()(t r t t r -∆+、运动方程)(t r r =。
在直角坐标系中,k t z j t y i t x t r)()()()(++=速度:t r v d d=; 加速度:22d d d d t rt v a ==在直角坐标系中,速度k v j v i v v z y x ++=,加速度k a j a i a a z y x++=自然坐标系中,速度 τ v v ==τ t s d d ,加速度t n a a a +==n rv t v2d d +τ 在极坐标系中,角量的描述:角速度t d d θω=,角加速度22d d d d tt θωα==3.运动学的两类基本问题:第一类问题:已知运动方程求速度、加速度等。
此类问题的基本解法是根据各量定义求导数。
第二类问题:已知速度函数(或加速度函数)及初始条件求运动方程。
此类问题的基本解法是根据各量之间的关系求积分。
例如据txv d d =,可写出积分式⎰x d =⎰t v d .由此求出运动方程)(t x x =。
4.相对运动:位移:t u r r ∆+'∆=∆ ,速度:u v v +'=,加速度:0a a a+'=第七章 气体动理论1.对“物质的微观模型”的认识;对“理想气体”的理解。
※2.理想气体的压强公式23132v n p k ρε==,其中221v m k =ε※理想气体物态方程:RT MmpV = 或 nkT p =理解压强与微观什么有关,即压强的物理含义是什么.※3.理想气体分子的平均平动动能与温度的关系:kT k 23=ε 理解温度与微观什么有关,即温度的物理含义。
※4.能量均分定理:气体处于平衡态时,分子每个自由度上的平均能量均为2kT概念:自由度※理想气体内能公式:RT iM m E 2=5.麦克斯韦气体分子速率分布律 ※麦克斯韦气体分子速率分布函数:定义:v NN v f d d 1)(=函数:22232π2π4)(v v v kTm e kT m f -⎪⎭⎫⎝⎛=以及v v f NNd )(d =;v v Nf N d )(d =;⎰21d )(v v v v Nf ;⎰21d )(v v v v f 等表示的物理含义。
三角测量和导线测量的比较

三角测量在地面上布设一系列连续三角形,采用测角方式测定各三角形顶点水平位置的方法。
是建立国家大地网和工程测量控制网的基本方法。
1617年由荷兰W.斯涅耳首创。
三角测量有两种扩展形式:①向各方向扩展,构成网状,称为三角网,它点位分布均匀,点间互相制约,对低等测量控制作用较强,但推进较慢。
②向某一定方向扩展,构成锁状,称为三角锁,它构成控制骨架,中间以次等三角测量填充,推进迅速,比三角网经济,但控制强度不如三角网。
三角测量作业分选定点位、造标埋石、水平角观测、成果计算等。
点位一般应选在展望良好、易于扩展的有利位置,使构成三角形的相邻点间互相通视。
在选定的点位上建造觇标,供观测照准和升高仪器,同时埋设标石作为三角点的永久性标志。
标石中心点是三角点的实际点位。
水平角观测是三角测量的关键性工作,观测选在通视良好、目标清晰稳定的有利时间进行。
三角测量除测水平角外,还要选择一些三角形的边作为起始边,测量其长度和方位角。
起始边的长度过去用基线尺丈量,20世纪50年代后用电磁波测距仪直接测量。
起始边的方位角用天文测量方法测定。
从一起始点和起始边出发,利用观测的角度值,逐一推算各边的长度和方位角,再进一步推算各三角形顶点在大地坐标系中的水平位置。
导线测量在地面上选择一条适宜的路线,在其中的一些点上设置测站,采取测边和测角方式来测定这些点的水平位置的方法。
它是几何大地测量学中建立国家大地控制网的主要方法之一,也是为地形测图、城市测量和各种工程测量建立控制点的常用方法。
为导线测量选择的测量路线称为导线。
它应当尽可能直伸,但由于地形限制,导线一般成一条折线。
导线上设置测站的点称为导线点。
测量每相邻两点间的距离,并在每一点上观测相邻两边之间的夹角,从一起始点坐标和方位角出发,利用测量的距离和角度,便可依次推算各导线点的水平位置。
为建立国家大地网以及某些城市测量和工程测量所实施的导线测量,称为精密导线测量。
其等级和精度要求与三角测量相同。
线段与角的关系
线段与角的关系线段和角是几何学中重要的概念,在几何问题的解决过程中经常会用到它们。
本文将探讨线段与角的定义、性质以及二者之间的关系。
一、线段的定义和性质线段是指两个点之间的有限部分,它可以用两个端点来唯一确定。
线段有以下性质:1. 长度:线段的长度是指两个端点之间的距离,可以通过勾股定理来计算。
2. 中点:线段的中点是指线段上距离两个端点相等的一个点,它把线段分成两个相等的部分。
3. 垂直平分线:线段的垂直平分线是指与线段垂直且通过线段中点的直线,它把线段分成两个相等的部分。
4. 分割线段:线段可以被分割成任意数量的等长部分。
二、角的定义和性质角是由两条射线共享一个公共端点而形成的图形,公共端点被称为角的顶点。
角的性质包括:1. 角的度量:角的度量是指角度的大小,用度来表示,圆周角的度量范围是0到360度。
可以用直角、钝角和锐角来描述角的大小。
2. 角的分类:根据角的度量大小可以将角分为直角、钝角和锐角。
3. 角的补角和余角:两个角互为补角,当它们的度数之和等于90度时;两个角互为余角,当它们的度数之和等于180度时。
4. 角的平分线:角的平分线是指从角的顶点出发,将角分成两个相等的部分的射线。
三、线段与角的关系线段和角有着密切的关系,常见的包括以下几种情况:1. 一个角的两条边可以看作是一个线段,这个线段被称为角的边。
2. 若线段的一边通过角的顶点,则这条线段与该角有交点。
3. 当角的度数为180度时,其两边共线,形成一条直线。
4. 当角的度数为0度时,其两边重合,形成一个点。
总结:线段是由两个点确定的有限部分,角是由两条射线的公共顶点确定的图形。
线段与角之间存在多种关系,通过分析和利用这些关系,可以在解决几何问题中得到更准确的结果。
本文介绍了线段和角的定义、性质以及二者之间的关系。
在几何学中,对线段和角的理解和运用是解决问题的关键。
通过熟练掌握线段与角之间的关系,我们可以更好地应用它们解决各种几何问题,提高数学问题的解题能力。
普通物理学第二版第七章课后习题答案
第七章 刚体力学7.1.1 设地球绕日作圆周运动.求地球自转和公转的角速度为多少rad/s 估算地球赤道上一点因地球自转具有的线速度和向心加速度.估算地心因公转而具有的线速度和向心加速度(自己搜集所需数据).[解 答]7.1.2 汽车发动机的转速在12s 内由1200rev/min 增加到3000rev/min.(1)假设转动是匀加速转动,求角加速度.(2)在此时间内,发动机转了多少转[解 答](1)22(30001200)1/601.57(rad /s )t 12ωπβ⨯-⨯===V V(2)222220()(30001200)302639(rad)2215.7πωωθβ--===⨯所以 转数=2639420()2π=转7.1.3 某发动机飞轮在时间间隔t 内的角位移为球t 时刻的角速度和角加速度.[解 答]7.1.4 半径为0.1m 的圆盘在铅直平面内转动,在圆盘平面内建立O-xy 坐标系,原点在轴上.x 和y 轴沿水平和铅直向上的方向.边缘上一点A 当t=0时恰好在x 轴上,该点的角坐标满足21.2t t (:rad,t :s).θθ=+求(1)t=0时,(2)自t=0开始转45o 时,(3)转过90o时,A 点的速度和加速度在x 和y 轴上的投影.[解 答](1) A ˆˆt 0,1.2,R j 0.12j(m/s).0,0.12(m/s)x y ωνωνν====∴==v(2)45θ=o时,由2A 1.2t t ,t 0.47(s)42.14(rad /s)v R πθωω=+==∴==⨯v v v得(3)当90θ=o时,由7.1.5 钢制炉门由两个各长1.5m 的平行臂AB 和CD 支承,以角速度10rad/s ω=逆时针转动,求臂与铅直45o 时门中心G 的速度和加速度.[解 答]因炉门在铅直面内作平动,门中心G 的速度、加速度与B 或D点相同。
所以:7.1.6 收割机拔禾轮上面通常装4到6个压板.拔禾轮一边旋转,一边随收割机前进.压板转到下方才发挥作用,一方面把农作物压向切割器,另一方面把切割下来的作物铺放在收割台上,因此要求压板运动到下方时相对于作物的速度与收割机前进方向相反. 已知收割机前进速率为1.2m/s ,拔禾轮直径1.5m ,转速22rev/min,求压板运动到最低点挤压作物的速度.[解 答]取地面为基本参考系,收割机为运动参考系。
刚体运动的描述

刚体的定轴转动是指 刚体上各点都绕同一直线 作圆周运动, 作圆周运动,而直线本身 在空间的位置保持不动的 一种转动。 一种转动。 这条直线称为转轴 转轴。 这条直线称为转轴。 刚体定轴转动的特点: 刚体定轴转动的特点: 1.刚体上各个质点都在作圆周运动,但各质点圆周 刚体上各个质点都在作圆周运动, 刚体上各个质点都在作圆周运动 运动的半径不一定相等。 运动的半径不一定相等。 2.各质点圆周运动的平面垂直于转轴线,圆心在轴 各质点圆周运动的平面垂直于转轴线, 各质点圆周运动的平面垂直于转轴线 线上,这个平面我们称为转动平面。 线上,这个平面我们称为转动平面。 3.各质点的位矢在相同的时间内转过的角度是相同的。 各质点的位矢在相同的时间内转过的角度是相同的。 各质点的位矢
10
ω = ω 0 + βt 1) ( )
1 2 ) θ − θ 0 = ω 0t + βt (2) 2
)、(2) 由(1)、( )式消 t得: )、( 得
2 2 0
ω = ω + 2 β (θ − θ 0 ) (3) )
与匀变速直线运动计算公式有对应关系: 与匀变速直线运动计算公式有对应关系:
dθ ∆θ = 角速度 ω = lim ∆t → 0 ∆ t dt
角速度为角坐标对时间的一次导数。 角速度为角坐标对时间的一次导数。 方向:满足右手定则, 方向:满足右手定则,沿刚体 转动方向右旋大拇指指向。 转动方向右旋大拇指指向。 角速度是矢量, 角速度是矢量,但对于刚体定轴转 动角速度的方向只有两个, 动角速度的方向只有两个,在表示角 速度时只用角速度的正负数值就可表 示角速度的方向,不必用矢量表示。 示角速度的方向,不必用矢量表示。
dθ ω= dt
∆t → 0
圆周运动例题及相对运动n2讲解
bt v
at
dv dt
d(v0 bt ) dt
b
20得 a24n/10到 /13 avR的2 大(v小0 及 Rb方 t )2向。
an at Ra O
7
2.
由at
a
,
n
即b (v0 bt )2 求出t。 R
2024/10/13
8
例6,(例题1-4)一曲柄连杆结构,曲柄OA长为r, 连杆AB长为L,AB一端在A处与曲柄相连,另一端以销子 在B处与活塞相连,当曲柄以匀角速绕o旋转时,通过 连杆将带动B处活塞在汽缸内往返运动,求活塞运动方程。
A
L
r
Q
B
x’ o’ P R o
x
活塞t时刻运动分析图10
A
l B
r
= t
x
x
x OR RB
PR
O
起始点
x r cost l2 r2 sin 2 t
2024/10/13
11
写为:
l2
r2
sin 2
t
l 1
r2
sin 2 2l 2
t
;而
sin2 t 1 cos2t ,移项整理得:
26
例2,货车遇到5m/s垂直下落的大雨,木 板及挡板都是1m,问货车以多大的速度 行驶才使木板不被雨淋。
v牵连 5
2024/10/13
v相对
45o l=1 v牵连 = 5
v绝对= 5 h=1
27
例题3,一升降机以加速度1.22m/s2 上升,当上升 速度为2.44m/s时,有一螺帽自升降机的天花板上 松落,天花板与升降机的底面相距2.74m,计算螺 帽从天花板落到底面所需要的时间和螺帽相对于 升降机外固定柱的下降距离。