自适应过程控制系统的模型建立与仿真实验
自适应控制课程总结及实验
自适应控制一、课程综述1. 引言传统的控制理论中,当对象是线性定常、并且完全已知的时候,才能进行分析和控制器设计。
无论是采用频域方法还是状态空间方法对象一定是已知的。
这类方法称为基于完全模型的方法。
在模型能够精确的描述实际对象时,基于完全模型的控制方法可以进行各种分析、综合,并得到可靠、精确和满意的控制效果。
因此,在工程中,要成功设计一个良好的控制系统,不论是通常的反馈控制系统或是最优控制系统,都需要掌握好被控系统的数学模型。
然而,有一些实际被控系统的数学模型是很难事先通过机理建模或离线系统辨识来确知的,或者它们的数学模型的某些参数或结构是处于变化之中的。
对于这些事先难以确定数学模型的系统,通过事先鉴定好控制器参数的常规控制难以应付。
面对这些系统特性未知或经常处于变化之中而无法完全事先确定的情况,如何设计一个满意的控制系统,使得能主动适应这些特性未知或变化的情况,这就是自适应控制所要解决的问题。
2. 自适应控制的原理自适应控制的定义:(1)不论外界发生巨大变化或系统产生不确定性,控制系统能自行调整参数或产生控制作用,使系统仍能按某一性能指标运行在最佳状态的一种控制方法。
(2)采用自动方法改变或影响控制参数,以改善控制系统性能的控制。
自适应控制的基本思想是:在控制系统的运行过程中,系统本身不断的测量被控系统的状态、性能和参数,从而“认识”或“掌握”系统当前的运行指标并与期望的指标相比较,进而做出决策,来改变控制器的结构、参数或根据自适应规律来改变控制作用,以保证系统运行在某种意义下的最优或次优状态。
按这种思想建立起来的控制系统就称为自适应控制系统。
自适应控制是主动去适应这些系统或环境的变化,而其他控制方法是被动地、以不变应万变地靠系统本身设计时所考虑的稳定裕度或鲁棒性克服或降低这些变化所带来的对系统稳定性和性能指标的影响。
好的自适应控制方法能在一定程度上适应被控系统的参数大范围的变化,使控制系统不仅能稳定运行,而且保持某种意义下的最优或接近最优。
自适应网络控制系统设计与仿真
自适应网络控制系统设计与仿真自适应网络控制系统是指网络系统中的各个节点能够根据当前的网络状态和环境变化来自动地调整网络的控制策略和参数,以达到更好的网络运行和性能优化的效果。
这种系统能够灵活地适应复杂多变的网络环境,能够有效地提高网络的可靠性、稳定性和吞吐量等性能指标,是当前网络技术研究中的热点和难点之一。
本文将从自适应网络控制系统的概念、设计方法和仿真技术等方面入手,探讨自适应网络控制系统的设计和仿真问题。
一、自适应网络控制系统的概念自适应网络控制系统是指网络系统中各个节点之间通过适当的信息交互和算法协调来实现网络的自适应控制和优化。
这种控制系统主要包括以下三个方面的内容:1、自适应控制算法和策略:根据当前的网络状态、任务要求和优化目标等因素,自动地选择适当的控制算法和策略,对网络的行为和性能进行调整和优化。
2、状态感知和信息交互:各个节点需要实时地感知网络的状态和环境变化,通过信息交互和共享来协调网络的行为和控制策略。
3、适应性参数调整:根据网络状态和环境变化,自动地调整参数和参数范围,以满足网络的性能要求和优化目标。
二、自适应网络控制系统的设计方法设计自适应网络控制系统需要考虑多方面的因素,包括网络的类型、规模、结构、硬件配置和运行环境等。
下面介绍几种常见的自适应网络控制系统设计方法:1、基于模型预测控制(MPC)的设计方法:这种方法主要利用系统的模型和预测方法来进行自适应控制,通过建立动态模型和预测模型,实现对系统行为和性能的精确预测和控制,适用于复杂、稳定性高和动态性强的网络系统。
2、基于数据驱动的设计方法:这种方法主要利用数据挖掘、机器学习和深度学习等技术,从海量数据中分析和提取有价值的信息和知识,实现网络的自适应控制和优化,比较适用于大规模、非线性和动态的网络系统。
3、基于控制论和博弈论的设计方法:这种方法主要利用控制论和博弈论等数学方法,对网络控制系统进行分析和优化,从控制理论、优化理论和信息论等方面实现对系统的自适应控制和优化。
自适应巡航控制系统的建模与联合仿真

自适应巡航控制系统的建模与联合仿真1、本文概述随着汽车行业的快速发展,智能驾驶辅助系统已成为现代汽车不可或缺的一部分。
自适应巡航控制(ACC)作为智能驾驶的重要组成部分,可以有效提高驾驶的安全性和舒适性。
本文旨在探索自适应巡航控制系统的建模和联合仿真方法。
通过构建精确的系统模型,结合先进的仿真技术,可以实现对自适应巡航控制系统性能的综合评估和优化。
文章首先介绍了自适应巡航控制系统的基本原理和功能,包括它的发展历史、技术特点以及它在汽车安全驾驶中的作用。
随后,文章阐述了自适应巡航控制系统的建模过程,包括车辆动力学模型、传感器模型、控制算法模型等关键部分的构建方法。
在此基础上,文章进一步介绍了联合仿真的概念及其在实现自适应巡航控制系统性能评估中的优势。
通过联合仿真,可以在虚拟环境中模拟真实的道路场景,全面测试自适应巡航控制系统的响应速度、稳定性和安全性等关键指标。
这种方法不仅降低了系统开发成本,而且提高了开发效率,为自适应巡航控制系统的实际应用提供了有力的支持。
文章总结了自适应巡航控制系统建模与联合仿真的重要性和应用前景,并展望了未来的研究方向。
本文的研究成果将为自适应巡航控制系统的优化和改进提供理论支持和实践指导,促进智能驾驶技术的发展和普及。
2、自适应巡航控制系统的基本原理自适应巡航控制(ACC)是一种智能驾驶辅助系统,旨在通过自动调整车辆的速度和与前车的距离来提高驾驶安全性和舒适性。
其基本原理主要基于车辆动力学、传感器技术和控制理论。
自适应巡航控制系统使用车辆前方的雷达或摄像头等传感器设备来检测前方道路环境和目标车辆的实时信息,包括前方车辆的距离、相对速度和动态行为。
这些信息为系统提供了决策依据。
基于所获得的前方车辆的信息,自适应巡航控制系统计算适当的加速或减速命令,并通过车辆的控制系统实现对发动机、制动系统和其他执行机构的精确控制。
该系统的目标是保持车辆与前车之间的安全距离,并在必要时自动调整速度,以适应前方交通环境的变化。
过程控制系统仿真实习报告
过程控制系统仿真实习报告一、实习目的与要求本次实习旨在通过使用MATLAB/Simulink仿真工具,对过程控制系统进行仿真研究,加深对控制理论的理解,提高控制系统设计和分析的能力。
实习要求如下:1. 熟练掌握MATLAB/Simulink的基本操作和仿真功能。
2. 了解过程控制系统的原理和常见控制策略。
3. 能够运用MATLAB/Simulink对过程控制系统进行建模、仿真和分析。
二、实习内容与过程1. 实习准备在实习开始前,先对MATLAB/Simulink进行学习和了解,掌握其基本的使用方法和功能。
同时,对过程控制系统的原理和常见控制策略进行复习,为实习做好充分的准备。
2. 实习过程(1) 第一个仿真项目:水箱液位控制系统在这个项目中,我们首先建立水箱液位的数学模型,然后根据该模型在Simulink中搭建仿真模型。
我们分别设计了单容、双容和三容水箱的液位控制系统,并分析了控制器参数对系统过渡过程的影响。
通过调整控制器参数,我们可以得到满意的控制效果。
(2) 第二个仿真项目:换热器温度控制系统在这个项目中,我们以换热器温度控制系统为研究对象,根据自动控制系统的原理,利用降阶法确定对象的传递函数。
在Simulink中,我们搭建了单回路、串级和前馈-反馈控制系统模型,并采用常规PID、实际PID和Smith预测器对系统进行仿真。
通过对比不同控制策略的仿真曲线,我们分析了各种控制策略的优缺点。
(3) 第三个仿真项目:基于模糊PID的控制系统在这个项目中,我们以工业锅炉燃烧过程控制系统为研究对象,利用模糊PID控制器优化锅炉燃烧过程控制系统的主要三个子系统:蒸汽压力控制系统、炉膛负压控制系统、燃料与空气比值系统的被控对象的函数。
通过仿真,我们优化了控制器的参数,使得系统在加入扰动后能够快速恢复稳定的状态。
三、实习收获与体会通过本次实习,我对MATLAB/Simulink仿真工具有了更深入的了解,掌握了其在过程控制系统仿真中的应用。
自适应控制系统的建模与优化
自适应控制系统的建模与优化随着科技的不断发展,自适应控制系统越来越被广泛运用于各种工业控制领域中。
自适应控制的核心思想是系统能够自动地调整其运行参数,以便更好地适应不同的环境和操作条件。
这种控制方式可以显著提高系统的运行效率、精度和稳定性,从而对于提高生产效率和质量至关重要。
本文将介绍自适应控制系统的建模和优化方法,以及其在现代制造业中的应用。
一、自适应控制系统的建模自适应控制系统的建模是实现自适应控制的基础。
建模过程一般包括模型选择、参数估计、模型验证和调整等步骤。
1、模型选择模型选择是自适应控制系统建模的第一步。
首先需要确定控制系统的性质和操作条件,以便选择合适的模型。
在选择模型时需要考虑控制对象的动态响应特性和环境变化因素等。
2、参数估计参数估计是建立自适应控制系统模型的关键步骤。
在此步骤中,需要根据实际运行数据对模型的参数进行估计,以获得更加准确的模型。
3、模型验证模型验证是评估模型性能和精度的过程。
在此过程中需要对模型进行实验验证,以检验模型的可靠性和适用性。
4、模型调整模型调整是根据实际运行情况对模型进行优化的过程。
在这一步骤中,需要对模型进行调整或重构,以适应不同的环境和操作条件。
二、自适应控制系统的优化自适应控制系统的优化是实现自适应控制的关键所在。
优化过程主要包括自适应参数调整和控制律设计两部分。
1、自适应参数调整自适应参数调整是自适应控制系统优化的第一步。
在此过程中,需要根据系统响应特性进行合理的参数调整,以保持系统的稳定性和优良性能。
2、控制律设计控制律设计是自适应控制系统优化的核心。
在此过程中,需要根据系统动态响应特性和环境变化因素等设计合适的控制律,以确保系统的稳定性和优良性能。
三、自适应控制系统在现代制造业中的应用自适应控制系统广泛应用于现代制造业中,其应用领域包括机械加工、自动化生产线、航空航天等。
1、机械加工在机械加工领域中,自适应控制系统可以通过调整加工过程中的参数,优化加工质量和效率。
自适应控制系统的研究及仿真分析

自适应控制系统的研究及仿真分析随着科技的不断进步,自适应控制系统(Adaptive Control System)的应用越来越广泛。
自适应控制系统能够根据系统的反馈信号和目标值预测未来的行为,并利用这些信息动态地调整系统的控制参数,以保持系统的稳定性和性能。
本文旨在介绍自适应控制系统的基本原理和应用,并通过仿真分析探讨其在实际中的应用前景。
一、自适应控制系统的原理自适应控制系统是一种基于自适应估计器的控制系统,其控制策略是通过不断变化的控制参数来实现最佳控制效果。
其核心是自适应估计器,其可以根据系统的反馈信号来实时估计系统的状态,从而根据状态的变化调整控制参数。
通常情况下,自适应估计器是基于模型参考自适应控制的基础上来建立的。
模型参考自适应控制是一种将现有控制系统的模型与参考模型进行比较来实现自适应控制的方法。
其中,参考模型是代表期望响应的理想模型,而现有控制系统则是实际的响应模型。
基于此方法的控制系统可以利用估计器和控制参数来调整实际响应以使其接近参考模型。
同时,系统可以在持续的跟踪和控制中逐渐学习到更多的信息以优化控制效果。
二、自适应控制系统的应用自适应控制系统已被广泛应用于机器人、飞行器、车辆等领域,特别是在不确定因素较大的系统中,自适应控制系统更能发挥其优势。
以下是自适应控制系统应用的实例。
1. 机器人机器人通常被用于制造和组装过程中进行操作。
自适应控制系统可以根据机器人的运动和传感器反馈信号处理数据,以正确操控机器人的动作。
同时,自适应控制系统也可以对机器人的环境进行适应,以提高机器人的性能。
2. 飞行器飞行器的飞行状态会受到气流和其他因素的影响,导致其运动不受控制。
自适应控制系统可以根据飞行状态的变化来调整控制参数,从而保持飞行器的稳定性和性能。
此外,在其他方面,如遥感和无人机中,自适应控制系统也被广泛使用。
3. 车辆在汽车、火车和飞机等交通运输工具中,安全是最关键的问题之一。
自适应控制系统可以改善转弯、加速和制动等轨迹控制,使车辆系统更加稳定和可靠。
自动化控制系统的建模与仿真
自动化控制系统的建模与仿真自动化控制系统是现代工程技术中的重要组成部分,它在各个领域中起到了关键的作用。
为了更好地设计和优化自动化控制系统,建模与仿真技术成为了必不可少的工具。
本文将探讨自动化控制系统的建模与仿真方法,以及其在实际应用中的重要性。
一、自动化控制系统的建模在进行自动化控制系统的建模之前,我们首先需要了解系统的结构和特性。
自动化控制系统通常由传感器、执行器、控制器和被控对象等组成。
传感器用于感知环境和系统状态,执行器负责执行控制指令,控制器对传感器信号进行处理,并根据预定算法生成控制信号,被控对象则是需要被控制的对象,例如机器人、发动机等。
建模是将真实世界中的系统抽象成数学模型的过程。
在自动化控制系统中,通常采用传递函数、状态空间模型或者差分方程等数学模型来描述系统的动态行为。
传递函数描述了系统的输入与输出之间的关系,状态空间模型则表示系统在各个离散时间点的状态变化,而差分方程则是描述系统状态之间的变化关系。
根据具体的系统特性和应用需求,选择合适的模型进行建模。
二、自动化控制系统的仿真通过建立系统的数学模型,我们可以使用仿真技术对系统进行模拟和评估。
仿真可以在计算机上对系统的动态行为进行模拟,并通过对仿真结果的分析来评估系统的性能。
在自动化控制系统的仿真中,我们需要确定仿真的时间步长、仿真的起始条件以及仿真的截止条件。
时间步长决定了仿真的精度,过小会增加计算量,过大则可能造成仿真结果的失真。
起始条件是仿真开始时系统各个状态的初始值,截止条件是仿真停止的条件,例如仿真时间达到一定值或者系统的某些性能指标达到了要求。
通过仿真,我们可以观察系统在各个时间点的状态变化,评估控制算法的性能,并进行参数优化。
仿真还可以帮助我们测试和验证自动化控制系统的稳定性、可靠性和鲁棒性。
三、自动化控制系统建模与仿真的重要性自动化控制系统的建模与仿真在实际应用中具有重要的意义。
首先,它可以帮助我们更加深入地理解系统的动态行为和内部机制。
智能车辆自适应巡航控制系统建模与仿真

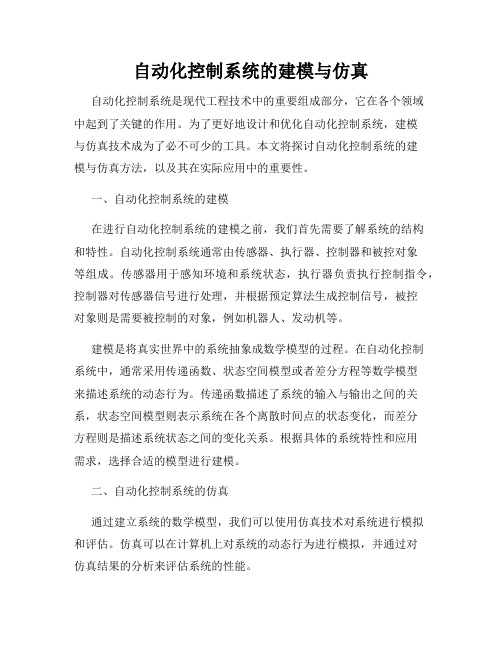
智能车辆自适应巡航控制系统建模与仿真 ———李以农 冀 杰 郑 玲等
图 1 车辆动力传动系统结构框图
Te = En g ( ne ,α)
(1)
·
ne = ( Te - Tp ) / Ie
(2)
式中 , En g (·) 为发动机转矩的特性函数 ; Tp 为液力变矩
器泵轮的输入转矩 ; Ie 为发动机的转动惯量 。
State Key Laboratory of Mechanical Transmissio n ,Cho ngqing U niversit y ,Cho ngqing ,400044 Abstract : In order to realize t he adaptive cruise f unctio n of intelligent vehicles , an adaptive cruise co nt rol system wit h a t wo - level st ruct ure was designed based o n f uzzy lo gic and slide mode co nt rol t heory. The system can co nt rol t hrot tle angle and brake p ressure coordinately so as to make t he vehi2 cle follow t he desired acceleratio n co mmand accurately , a logic switch rule bet ween t hrot tle and brake co nt rol was al so designed to ensure t he coordinatio ns of t his co nt rol system. The simulatio n result s show t hat t he p ropo sed co nt rol system p rovides satisfacto ry t racking performances and suitabilit y in sit uatio ns such as t ractio n , vehicle following and braking. Key words :powert rain system ; adap tive cruise co nt rol ; slide mode co nt rol ; f uzzy logic
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应过程控制系统的模型建立与仿真实验
随着科技的不断发展,自适应过程控制系统在工业生产中得到了广泛应用。
自适应过程控制系统能够对生产过程中的变化进行及时响应和调整,达到最大限度地优化生产效率和产品质量。
本文将介绍自适应过程控制系统的基本原理和模型建立方法,以及如何通过仿真实验对系统性能进行评估与优化。
一、自适应过程控制系统基本原理
自适应过程控制系统是指通过对受控对象进行监测和分析,对控制器或控制算法进行实时调整,以达到生产过程的最优化控制的一种控制系统。
它的基本结构包括受控对象、传感器、控制器和执行机构等四部分。
其中,传感器用于对受控对象的状态进行实时监测,控制器则根据传感器获取的数据进行控制算法的调整,最终通过执行机构对受控对象进行控制。
自适应过程控制系统的基本原理可以用下图表示:
图1 自适应过程控制系统基本结构图
自适应过程控制系统对受控对象的调整是通过调整控制器或者控制算法来实现的。
为了使控制器或者控制算法更加精确地调整,需要先建立一个可靠的、与实际生产过程相适应的动态数学模型。
二、自适应过程控制系统的模型建立
在自适应过程控制系统中,模型建立是非常重要的一步。
一个准确的模型能够帮助我们更好地理解受控对象的性质和行为规律,从而使控制器或者控制算法更加精确地调整。
以下是模型建立的五个步骤:
1、确定受控对象
我们需要先明确受控对象的类型和性质,以确定我们需要建立的模型的类型和
实际应用范围。
例如,如果我们需要控制某个生产流程中的温度变化,那么受控对象就是温度单元。
2、选择模型类型
根据受控对象的特性,选择合适的模型类型。
一般情况下,我们可以选择传统
的模型类型,例如传输函数模型或者状态空间模型。
此外,也可以采用非参数模型,例如神经网络模型或者模糊逻辑模型等。
3、数据采集
我们需要采集受控对象的数据,并将其输入到模型中进行分析。
数据采集的方
法和设备可以根据具体的受控对象和实际应用环境进行选择。
4、模型参数估计
将采集得到的数据输入到模型中进行参数估计和模型拟合,以获得一个准确的
模型。
5、模型验证和评估
将模型与实际受控对象进行对比,查看模型的精确度和适应性,并进行评估和
调整。
三、自适应过程控制系统的仿真实验
在模型建立完成后,我们可以通过仿真实验来对自适应过程控制系统的性能进
行评估和优化。
仿真实验可以减少实际生产过程中对设备和物料的损坏,也可以减少实验成本,提高实验效率。
仿真实验的步骤如下:
1、建立仿真平台
首先建立一个合适的仿真平台,包括仿真软件和仿真模型。
一般情况下,我们可以使用Simulink等模型建模软件。
2、载入控制算法
将控制算法加载到仿真平台中,并将其与模型进行集成。
控制算法可以是PID 算法,模糊控制算法或者神经网络算法等。
3、设定仿真参数
根据实际应用环境和受控对象的特性,设定仿真参数,例如温度、压力等。
4、加入干扰项
在仿真平台中加入干扰项,以模拟实际生产过程中会发生的干扰,例如变量的不确定性、噪声等。
5、进行仿真实验
开始仿真实验,记录实验数据,例如温度变化、控制输出值、误差等。
6、分析实验结果
对实验数据进行分析和处理,评估控制系统的性能,识别潜在的问题和改进空间,并作出有针对性的调整。
总之,自适应过程控制系统是实现生产过程优化的一种非常重要的工具,其模型建立和仿真实验是确保控制系统准确可靠的前提。
在实际应用中,需要根据实际应用环境和受控对象的特性进行选择和匹配,以得到最佳的控制效果。