超磁致伸缩滚珠丝杠副智能预紧技术 著作
滚珠丝杠副的精度等级与丝杠制造最大长度

外循环
结构
圈数 列数 螺母外径
特点
每个返向器 1 圈 2 列以上 小
通过返向器组成滚珠循环回路,每一个 返向器组成 1 圈滚珠链。承载小,适应 于螺母外径小、导程小的滚珠丝杠副结 构。
1.5 圈以上(2.5、3.5 圈) 1 列以上 大
40
34
47
39
55
44
表 5 任 意 300 mm行 程 内 变 动 量 ( V300p) 和 2π 弧 度 内 行 程 变 动 量 ( V2πp)
精度等级
V 300p V2πp
1
2
3
4
6
8
12
16
4
5
6
7
注:7,10 级属传动滚珠丝杠副,在表 4,表 5 中未列出。
单位:μm 5 23 8
4
3.2 滚珠丝杠副安装轴颈跳动及位置公差
200
16
18
20
26
32
注: l 长度处支承轴径相对于 A 基准的径向圆跳动,当 l6 ≤ l 时为 t6 p ,当 l6 > l 时,其允许值为:
t6
p
×
l6 l
表 8 支承轴径肩面对A基准的圆跳动t8
公称直径
公差等级
d0
1
2
3
4
5
mm
t8p,μm
≥ 6 - 63
3
4
4
5
5
5
表 9 滚珠螺母安装端面对B基准的径向跳动t9
传动效率 Ed≥90%。
二、JCSGY 滚珠丝杠副结构与预紧方 式
国内外超磁致伸缩材料及作动器的
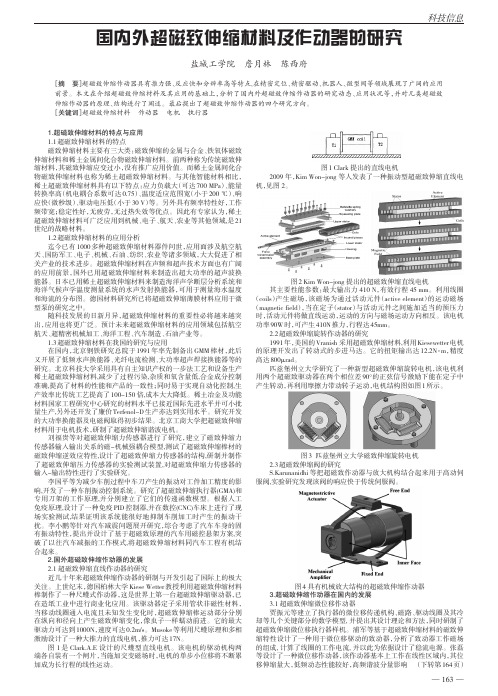
科技信息1.超磁致伸缩材料的特点与应用1.1超磁致伸缩材料的特点磁致伸缩材料主要有三大类:磁致伸缩的金属与合金、铁氧体磁致伸缩材料和稀土金属间化合物磁致伸缩材料。
前两种称为传统磁致伸缩材料,其磁致伸缩应变过小,没有推广应用价值。
而稀土金属间化合物磁致伸缩材料也称为稀土超磁致伸缩材料。
与其他智能材料相比,稀土超磁致伸缩材料具有以下特点:应力负载大(可达700MPa)、能量转换率高(机电耦合系数可达0.75)、温度适应范围宽(小于200℃)、响应快(微秒级)、驱动电压低(小于30V)等。
另外具有频率特性好,工作频带宽;稳定性好,无疲劳,无过热失效等优点。
因此有专家认为,稀土超磁致伸缩材料可广泛应用到机械、电子、航天、农业等其他领域,是21世纪的战略材料。
1.2超磁致伸缩材料的应用分析迄今已有1000多种超磁致伸缩材料器件问世,应用面涉及航空航天、国防军工、电子、机械、石油、纺织、农业等诸多领域,大大促进了相关产业的技术进步。
超磁致伸缩材料在声频和超声技术方面也有广阔的应用前景,国外已用超磁致伸缩材料来制造出超大功率的超声波换能器。
日本已用稀土超磁致伸缩材料来制造海洋声学断层分析系统和海洋气候声学温度测量系统的水声发射换能器,可用于测量海水温度和海流的分布图。
德国材料研究所已将超磁致伸缩薄膜材料应用于微型泵的研究之中。
随科技发展的日新月异,超磁致伸缩材料的重要性必将越来越突出,应用也将更广泛。
预计未来超磁致伸缩材料的应用领域包括航空航天、超精密机械加工、海洋工程、汽车制造、石油产业等。
1.3超磁致伸缩材料在我国的研究与应用在国内,北京钢铁研究总院于1991年率先制备出GMM棒材,此后又开展了低频水声换能器、光纤电流检测、大功率超声焊接换能器等的研究。
北京科技大学采用具有自主知识产权的一步法工艺和设备生产稀土超磁致伸缩材料,减少了过程污染,杂质和氧含量低,合金成分控制准确,提高了材料的性能和产品的一致性;同时易于实现自动化控制,生产效率比传统工艺提高了100-150倍,成本大大降低。
工业机器人技术(第三版)课后答案 郭洪红主编

第一章课后习题1、工业机器人定义:是机器人的一种,由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间内完成各种作业的机电一体化的自动化生产设备。
2、工业机器人应用场合及其特点:①恶劣工作环境及危险工作(有害健康并可能危及生命,或不安全因素大不宜于人去从事的作业)②特殊作业场合和极限作业(对人类力所不及的作业)③自动化生产领域(早期工业机器人再生产主要用于上下料、点焊和喷漆,随柔性自动化出现扮演更重要角色)3、说明工业机器人的基本组成及各部分之间的关系。
答:工业机器人由三大部分六个子系统组成。
三大部分是机械部分、传感部分和控制部分。
六个子系统是驱动系统、机械结构系统、感受系统、机器人—环境交互系统、人机交互系统和控制系统。
关系由右图表明:4、简述工业机器人各参数的定义:自由度、重复定位精度、工 作范围、工作速度、承载能力。
答:自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度。
重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示,它是衡量一列误差值的密集度(即重复度)。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指工作时的最大稳定速度。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
承载能力不仅指负载,而且还包括了机器人末端操作器的质量。
5、按坐标形式分类及特点:①直角坐标型(这种机器人在x、y、z轴上的运动是独立的, 运动方程可独立处理, 且方程是线性的, 因此, 很容易通过计算机控制实现; 它可以两端支撑, 对于给定的结构长度, 刚性最大; 它的精度和位置分辨率不随工作场合而变化, 容易达到高精度。
但它的操作范围小,手臂收缩的同时又向相反的方向伸出, 即妨碍工作, 且占地面积大, 运动速度低, 密封性不好。
工作范围是立方体型)②圆柱坐标型(这种机器人可以绕中心轴旋转一个角,工作范围可以扩大,且计算简单; 直线部分可采用液压驱动,可输出较大的动力; 能够伸入型腔式机器内部。
《磁致伸缩原理》课件

这个PPT课件将向您介绍磁致伸缩原理,包括其描述、应用、结构、制备技 术,以及研究现状和发展趋势。
磁致伸缩效应的描述
磁致伸缩效应是指当一种材料处于磁场中时,其尺寸会发生变化的现象。这种效应是由材料内部的微观 磁结构的改变引起的。
磁致伸缩效应的应用
磁致伸缩效应具有广泛的应用领域。它可以用于制造精密仪器和传感器、调节和控制设备、以及开发新 型的机械和电子元件。
目前,磁致伸缩元件的研究正在不断发展。研究人员正在致力于提高元件的 灵敏度、稳定性和可靠性,并探索更多新的应用领域。
结论
磁致伸缩原理是一项重要的科学发现,其应用潜力巨大。随着研究的深入和 技术的进步,磁致伸缩元件将在更多领域缩元件通常由磁性材料和弹性材料组成。磁性材料的磁性可以通过外部磁场来控制,从而改变元 件的尺寸。
磁致伸缩元件的制备及关键技 术
制备磁致伸缩元件的关键技术包括合金的选择和合金热处理,以及元件的加 工和装配技术。这些技术的发展对提高元件的性能至关重要。
磁致伸缩元件的研究现状和发 展趋势
永磁同步电机的书籍
永磁同步电机的书籍永磁同步电机是一种具有高效率、高功率密度和低噪音的电机,目前正被广泛应用于电动汽车、风力发电、工业机器人等领域。
想要深入了解永磁同步电机的原理、结构和应用,可以参考以下几本书籍。
1.《永磁同步电机设计与控制》作者:姚剑平本书介绍了永磁同步电机的设计方法和控制策略,包括永磁电机的基本原理、磁场分析、参数计算、热特性分析等。
另外,本书还详细讨论了永磁同步电机的控制技术,包括IPMSM开环控制、矢量控制等,并提供了控制算法的代码实现。
2.《永磁同步电机设计制造技术与应用》作者:宋桂木,潘树伟,徐银平该书以永磁同步电机的设计、制造和应用为主线,介绍了永磁材料、电磁分析和磁场调制等技术的应用,系统地分析了永磁同步电机的磁路、电路和控制系统,并以汽车驱动电机、机器人电机等实际应用为例进行了说明和分析。
3.《永磁电机及其控制技术》作者:王亮,赵天杰本书系统地介绍了永磁同步电机的原理和控制技术,包括永磁电机的动态特性、电磁场分析、参数计算、磁场调制和控制策略等。
此外,本书还讨论了永磁电机在电动汽车、风力发电、轨道交通等领域的应用实例,并对永磁同步电机未来的发展趋势进行了展望。
4.《永磁同步电机控制技术与应用》作者:王亮,任忠贤本书全面介绍了永磁同步电机的控制技术和应用实例,包括控制器的设计和控制方法的选择等。
此外,本书还系统地阐述了永磁同步电机在电动汽车驱动、工业机器人等领域的应用,并对未来永磁同步电机的市场前景进行了分析和展望。
综上所述,永磁同步电机是一种功能强大的电机,其应用领域广泛。
这些书籍可以帮助读者全面认识永磁同步电机的原理和控制技术,有助于深入了解和应用永磁同步电机。
磁滞伸缩驱动器磁滞特性的Persiach模型建模

磁滞伸缩驱动器磁滞特性的Persiach模型建模冒鹏飞;王传礼;喻曹丰;钟长鸣【摘要】Giant magnetostrictive material (GMM) exists intrinsic magnetic hysteresis nonlinearity, large hysterisis error will happened when it is used for precision positioning, accurate mathematical model to describe the hysteresis nonlinearity seems very important in control the output accuracy of the giant magnetostrictive actuatort.%超磁致伸缩材料具有本征磁滞非线性,用于精密定位时具有较大的回程误差.为控制超磁致伸缩驱动器的输出位移精度,需要建立准确的数学模型来描述其磁滞非线性.基于经典的Preisach磁滞模型,通过对Preisach磁滞模型的离散化,建立了超磁致伸缩驱动器的Preisach磁滞数学模型;并进行了超磁致伸缩驱动器输出位移实验研究.实验结果表明:模型计算的结果和实验结果基本吻合,证明所建模型能够较好地反映实际情况.【期刊名称】《科学技术与工程》【年(卷),期】2017(017)009【总页数】4页(P149-152)【关键词】超磁致伸缩材料(GMM);磁滞非线性;Preisach磁滞模型;离散化【作者】冒鹏飞;王传礼;喻曹丰;钟长鸣【作者单位】安徽理工大学机械工程学院,淮南 232001;安徽理工大学机械工程学院,淮南 232001;安徽理工大学机械工程学院,淮南 232001;安徽理工大学机械工程学院,淮南 232001【正文语种】中文【中图分类】TB34超磁致伸缩材料(gaint magnetostrictive material,GMM)是铁磁性功能材料[1],具有磁致伸缩应变大、能量密度高、响应速度快、输出力大、磁机耦合系数大、居里温度高等优点[2],并且能够实现电磁能—机械能的可逆转化,被称作是21世纪战略性高科技材料[2,3]。
PHASE INTERPOLATOR

专利名称:PHASE INTERPOLATOR发明人:SHI, Ming申请号:EP19219260.7申请日:20191223公开号:EP3675359A3公开日:20200708专利内容由知识产权出版社提供专利附图:摘要:The invention relates to the technical field of high-speed data transmission, and more particularly, to a phase interpolator. The phase interpolator comprises a phase adjusting circuit, and the phase adjusting circuit comprises a first phase adjusting module and a second phase adjusting module, the first phase adjusting module outputs a firstclock signal, and the second phase adjusting module outputs a second clock signal; the first phase adjustment module and the second phase adjustment module are connected in parallel to output an interpolation signal. The technical scheme provided by the invention has the beneficial effects that through the first phase adjustment module and the second phase adjustment module the first clock signal and the second clock signal with the same frequency and different phases are mixed in proportion by adopting a voltage mode to generate an interpolation signal with the same frequency and the phase between the first clock signal and the second clock signal so as to achieve the purpose of phase adjustment, and meanwhile, the circuit can be carried out under lower voltage, so that the power consumption of the phase adjusting circuit is further reduced.申请人:Amlogic (Shanghai) Co., Ltd.地址:Room 207 No. 518 Bibo Road China (Shanghai) Pilot Free Trade Zone Pudong Shanghai 201203 CN国籍:CN代理机构:Kondrat, Mariusz更多信息请下载全文后查看。
超磁致伸缩材料驱动微型马达的原理与应用
随 着超磁致伸缩材料性能的日趋完善, 科技 人员一直试图将其应用于高精度微型机械装置 中, 并期待着显著地提高产品的使用性能。超磁致 伸缩材料最初是被应用于各种换能器和执行器装 置中, 同时也被探索性地以各种形式应用于机械 马达装置中。超磁致伸缩马达按运动形式一般分 为尺蠖式、旋转式和直线式三种。 2. 1 尺蠖式超磁致伸缩马达
泛的超磁致伸缩薄膜材料。 超磁致伸缩薄膜除了
具有合金材料的性能外, 还具有涡流损耗及磁滞
小等特性。 薄膜的成功制备为超磁致伸缩微型马
达的研究提供了新的应用材料。
H a lstrup 等根据超磁致伸缩薄膜材料应变
大、频响快、滞后小且驱动磁场低等特点 Nhomakorabea 利用薄
膜振动的原理研制出一种直线超声马达[8], 虽然
·1161·
em 为机械效率, em = 1 (1 + R m R load) ; R m 为阻尼电阻; R load 为负载电阻。
由 式 (4) 可以看出, 超磁致伸缩马达装置的 输出功率完全取决于有效耦合系数。在理想情况 下, 超磁致伸缩马达装置的有效耦合系数等于材 料的耦合系数。
通过上述简化理论分析可进一步了解超磁致 伸缩马达系统的特性, 如马达系统中的应力和磁 场有一个极限强度, 共振动态应变比静态应变大 以及要保证励磁场在一定的范围内等特性。然而, 为了理论分析方便我们对磁场形态、应力一致性 等条件进行了假设, 以至于不能完全正确地预测 超磁致伸缩马达的运行状态。因此, 为了得到更加 可靠的超磁致伸缩马达系统, 需不断深入研究和 发展各种超磁致伸缩马达精确模型, 准确地分析 马达系统参数。国外学者已经开始对几种初级的 超磁致伸缩马达原型进行研究, 并取得了一定的 成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
超磁致伸缩滚珠丝杠副智能预紧技术
在工程领域中,超磁致伸缩滚珠丝杠副智能预紧技术是一项备受关注
的前沿研究课题。
本文将深入探讨这一技术的原理、应用及未来发展
趋势,希望能够为您对该主题的深入理解提供有益帮助。
1. 技术原理
超磁致伸缩滚珠丝杠副智能预紧技术是基于磁致伸缩材料的特性,通
过控制磁场来实现对滚珠丝杠副的智能预紧。
磁致伸缩材料的磁化强
度可以受到外界磁场的影响而发生变化,利用这一特性可以实现对滚
珠丝杠副的精准控制和调节,从而提高其工作效率和稳定性。
2. 技术应用
超磁致伸缩滚珠丝杠副智能预紧技术在工程机械领域具有广泛的应用
前景。
在数控机床、机器人臂、航空航天设备等领域,利用该技术可
以实现对传动系统的高精度控制和长期稳定运行,提高设备的工作效
率和可靠性。
3. 技术发展趋势
随着工业自动化和智能化水平的不断提高,超磁致伸缩滚珠丝杠副智
能预紧技术将在未来得到更广泛的应用。
随着磁致伸缩材料和控制技
术的不断创新,该技术将不断提升在精密制造和高端装备领域的地位,为工程技术的发展带来新的机遇和挑战。
总结回顾
通过本文的介绍,相信您对超磁致伸缩滚珠丝杠副智能预紧技术已经
有了一定的了解。
在未来的工作和研究中,我们应该密切关注该技术
的最新进展,不断深化对其原理和应用的理解,以推动相关领域的技
术创新和发展。
个人观点与理解
作为一项新兴的前沿技术,超磁致伸缩滚珠丝杠副智能预紧技术在工
程领域具有重要意义。
我个人认为,通过深入研究和实践,可以进一
步发挥该技术的优势,为工程制造和设备运行提供更加可靠和高效的
解决方案。
结语
以上是对超磁致伸缩滚珠丝杠副智能预紧技术的介绍与探讨,希望能
为您对该主题的深入理解提供帮助。
在未来的工作和学习中,让我们
共同关注该技术的发展动态,为工程技术的进步贡献自己的一份力量。
结尾。
超磁致伸缩滚珠丝杠副智能预紧技术是一种能够实现滚珠丝杠
副智能预紧的技术,它利用磁致伸缩材料的特性,通过控制磁场来实
现对滚珠丝杠副的精准控制和调节,从而提高其工作效率和稳定性。
这项技术在工程领域中有着广泛的应用前景,特别是在工业自动化和
智能化水平不断提高的今天,其重要性更加突出。
超磁致伸缩材料是一种特殊的功能材料,其在外加磁场的作用下能够
发生磁致伸缩效应,即在磁场作用下产生形变。
利用这一特性,可以
实现对滚珠丝杠副的智能预紧。
通过控制磁场的强度和方向,可以准
确地控制滚珠丝杠副的预紧力,从而保证其在工作过程中的稳定性和
精准性。
在工程机械领域中,超磁致伸缩滚珠丝杠副智能预紧技术有着广泛的
应用。
在数控机床、机器人臂、航空航天设备等领域,利用该技术可
以实现对传动系统的高精度控制和长期稳定运行,提高设备的工作效
率和可靠性。
而且,在一些需要高精度控制和稳定性的领域,如光学
仪器制造、半导体设备制造等,这项技术也具有重要的应用价值。
随着工业自动化和智能化水平的不断提高,超磁致伸缩滚珠丝杠副智
能预紧技术将在未来得到更广泛的应用。
随着磁致伸缩材料和控制技
术的不断创新,该技术将不断提升在精密制造和高端装备领域的地位,为工程技术的发展带来新的机遇和挑战。
近年来,随着人工智能、大数据、云计算等新兴技术的快速发展,工
业智能化已经成为国家制造业转型升级的重要方向。
超磁致伸缩滚珠
丝杠副智能预紧技术作为工程智能制造的重要支撑技术之一,将会在
智能制造领域发挥重要作用。
它不仅能够提高设备的工作效率和稳定性,还能够为工程制造领域的高精度加工和自动化生产提供技术支持。
在未来的工作和研究中,需要重点关注超磁致伸缩滚珠丝杠副智能预紧技术的关键技术问题,包括磁致伸缩材料的改性和性能优化、磁场控制技术的精度和稳定性提升、智能预紧算法的改进与优化等方面。
需要加强跨学科、跨行业的合作交流,推动超磁致伸缩滚珠丝杠副智能预紧技术的理论研究和工程应用,为智能制造和工程技术的发展做出贡献。
超磁致伸缩滚珠丝杠副智能预紧技术是一项具有重要应用价值和发展前景的前沿技术,在工程制造领域有着广阔的应用前景。
随着技术的不断创新和突破,相信这项技术将为工程技术的发展和智能制造的进步带来新的机遇和挑战。
希望通过我们的共同努力,能够推动超磁致伸缩滚珠丝杠副智能预紧技术走向成熟和应用,为工程领域的发展做出更大的贡献。