遥感影像分类envi
遥感ENVI实验报告
遥感ENVI实验报告一、实验目的本实验的目的是学习和掌握ENVI(Environment for Visualizing Images)软件在遥感图像处理方面的应用。
通过本次实验,我们将了解遥感图像的基本概念和原理,并学习使用ENVI软件进行图像预处理、分类和地物提取。
二、实验要求1.学习ENVI软件的基本操作和功能;2.能够对遥感图像进行预处理,如辐射校正和大气校正;3.能够对遥感图像进行分类,如最大似然分类和支持向量机分类;4.能够进行地物提取,如植被指数计算和特征提取。
三、实验步骤和结果1.图像预处理首先,我们导入了一幅Landsat 8卫星遥感图像,并进行了辐射校正和大气校正。
辐射校正是将图像中的DN(数字化值)转换为辐射度值,以便进行后续的大气校正和分类。
大气校正是根据大气传输模型对图像进行校正,以消除大气影响。
经过预处理后,我们得到了一幅处理后的图像。
2.图像分类接下来,我们使用ENVI软件进行了图像分类。
我们采用了最大似然分类和支持向量机分类两种方法进行分类。
最大似然分类是一种统计分类方法,通过最大化每类像素的似然度来划分不同类别,得到分类结果。
支持向量机分类是一种基于机器学习的分类方法,通过训练样本来构建分类模型,并用于对图像中的未分类像素进行分类。
3.地物提取最后,我们对图像进行了地物提取。
我们计算了该图像的植被指数,并使用阈值法将植被像素提取出来。
植被指数是通过计算不同波段之间的光谱差异来反映植被覆盖程度的指标。
我们还对植被像素进行了形状和纹理特征的提取,以获取更具有区分度的特征。
实验结果显示,经过图像预处理和分类,我们得到了一幅分类结果图。
通过该图像,我们可以清楚地看到不同地物类别的分布情况。
同时,通过地物提取,我们成功提取出了图像中的植被像素,并获得了植被的形状和纹理特征。
四、实验总结通过本次实验,我们学习和掌握了ENVI软件在遥感图像处理方面的应用。
我们了解了遥感图像的基本概念和原理,并学会了使用ENVI软件进行图像预处理、分类和地物提取。
envi遥感图像处理之分类
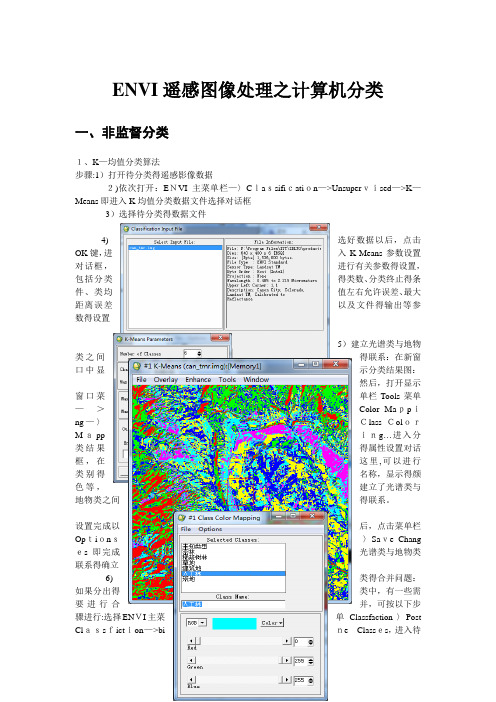
ENVI遥感图像处理之计算机分类一、非监督分类1、K—均值分类算法步骤:1)打开待分类得遥感影像数据2)依次打开:ENVI主菜单栏—〉Classification—>Unsupervised—>K—Means即进入K均值分类数据文件选择对话框3)选择待分类得数据文件4)选好数据以后,点击OK键,进入K-Means参数设置对话框,进行有关参数得设置,包括分类得类数、分类终止得条件、类均值左右允许误差、最大距离误差以及文件得输出等参数得设置5)建立光谱类与地物类之间得联系:在新窗口中显示分类结果图:然后,打开显示窗口菜单栏Tools菜单—>Color Mapping—〉Class ColorMapping…进入分类结果得属性设置对话框,在这里,可以进行类别得名称,显示得颜色等,建立了光谱类与地物类之间得联系。
设置完成以后,点击菜单栏Options-〉Save Chang es 即完成光谱类与地物类联系得确立6)类得合并问题:如果分出得类中,有一些需要进行合并,可按以下步骤进行:选择ENVI主菜单Classfaction-〉Post Classfiction—>bine Classes,进入待合并分类结果数据得选择对话框点击OK键,进入合并参数设置对话框,在左边选择要合并得类,在右边选择合并后得类,点击Add bination键即完成一组合并得设置,如此反复,对其她需合并得类进行此项操作,点击OK,出现输出文件对话框,选择输出方式,即完成了类得合并得操作.至此,K—均值分类得方法结束。
2、ISODATA算法基本操作与K—均值分类相似。
1)进行分类数据文件得选择(依次打开:ENVI主菜单栏—>Classification—>Unsupervised—>IsoData即进入ISODATA算法分类数据文件选择对话框,选择待分类得数据文件)2)进行分类得相关参数得设置(点击OK键以后,进入参数设置对话框,可以进行分类得最大最小类数、迭代次数等参数得设置)3)如此,光谱类得划分到此结束。
envi遥感影像精度检验步骤
envi遥感影像精度检验步骤
以下是使用ENVI进行遥感影像精度检验的步骤:
1.加载图像:在ENVI中加载需要进行精度检验的遥感影像。
2.创建训练样本集:根据实际需要,使用ROI工具创建训练样本集。
训练样
本集应该包含真实的地物信息,用于后续的分类精度评估。
3.分类:在ENVI中进行图像分类,得到分类结果。
常用的分类方法包括监督
分类、非监督分类等。
4.精度评估:使用ENVI中的混淆矩阵工具,对分类结果进行精度评估。
混淆
矩阵可以显示分类结果中的各类地物正确和错误的分类情况。
5.分析精度:根据混淆矩阵的分析结果,可以得出分类精度、总体精度、
Kappa系数等精度指标,进而评估分类结果的可靠性。
6.优化分类:根据精度评估结果,对分类过程进行优化,例如调整分类参数、
改进训练样本集等,以提高分类精度。
7.应用改进后的分类方法:将优化后的分类方法应用到实际遥感影像中进行
分类,并对分类结果进行精度评估,确认是否达到了精度要求。
通过以上步骤,可以对遥感影像的分类结果进行准确的精度评估,为后续的数据处理和应用提供可靠的基础。
需要注意的是,以上步骤只是其中的一部分流程,具体的操作方法和参数设置可能因遥感影像的数据特点和实际需求而有所不同。
envi遥感图像监督分类与非监督分类
envi遥感图像监督分类监督分类,又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。
它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。
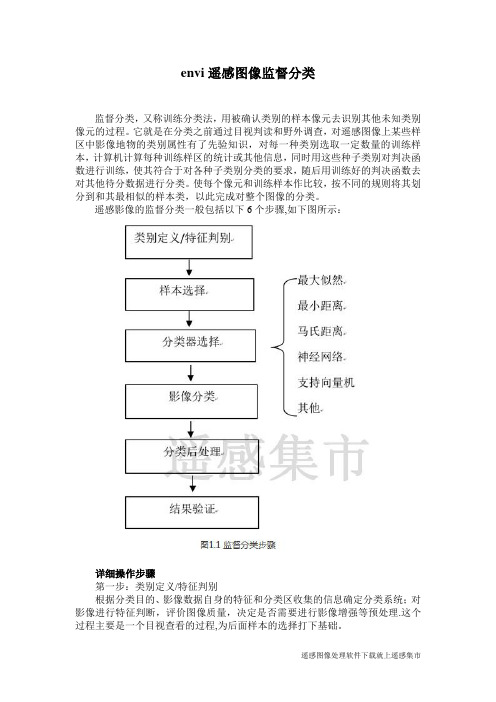
遥感影像的监督分类一般包括以下6个步骤,如下图所示:详细操作步骤第一步:类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理.这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。
启动ENVI5.1,打开待分类数据:can_tmr.img。
以R:TM Band 5,G:TM Band 4,B:TM Band 3波段组合显示。
通过目视可分辨六类地物:林地、草地/灌木、耕地、裸地、沙地、其他六类。
第二步:样本选择(1)在图层管理器Layer Manager中,can_tmr.img图层上右键,选择”New Region Of Interest",打开Region of Interest (ROI)Tool面板,下面学习利用选择样本。
1)在Region of Interest (ROI) Tool面板上,设置以下参数:ROI Name:林地ROI Color:2)默认ROIs绘制类型为多边形,在影像上辨别林地区域并单击鼠标左键开始绘制多边形样本,一个多边形绘制结束后,双击鼠标左键或者点击鼠标右键,选择Complete and Accept Polygon,完成一个多边形样本的选择;3)同样方法,在图像别的区域绘制其他样本,样本尽量均匀分布在整个图像上;4)这样就为林地选好了训练样本。
遥感影像分类精度评价
遥感影像分类精度评价在ENVI中,选择主菜单->Classification->Post Classification->Confusion Matrix->Using Ground Truth ROIs。
将分类结果和ROI输入,软件会根据区域自动匹配,如不正确可以手动更改。
点击ok后选择报表的表示方法(像素和百分比),就可以得到精度报表。
对分类结果进行评价,确定分类的精度和可靠性。
有两种方式用于精度验证:一是混淆矩阵,二是ROC曲线,比较常用的为混淆矩阵,ROC曲线可以用图形的方式表达分类精度,比较形象。
对一帧遥感影像进行专题分类后需要进行分类精度的评价,而进行评价精度的因子有混淆矩阵、总体分类精度、Kappa系数、错分误差、漏分误差、每一类的制图精度和拥护精度。
1、混淆矩阵(Confusion Matrix): 主要用于比较分类结果和地表真实信息,可以把分类结果的精度显示在一个混淆矩阵里面。
混淆矩阵是通过将每个地表真实像元的位置和分类与分类图象中的相应位置和分类像比较计算的。
混淆矩阵的每一列代表了一个地表真实分类,每一列中的数值等于地表真实像元在分类图象中对应于相应类别的数量,有像元数和百分比表示两种。
2、总体分类精度(Overall Accuracy): 等于被正确分类的像元总和除以总像元数,地表真实图像或地表真实感兴趣区限定了像元的真实分类。
被正确分类的像元沿着混淆矩阵的对角线分布,它显示出被分类到正确地表真实分类中的像元数。
像元总数等于所有地表真实分类中的像元总和。
3、Kappa系数:是另外一种计算分类精度的方法。
它是通过把所有地表真实分类中的像元总数(N)乘以混淆矩阵对角线(Xkk)的和,再减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果,再除以总像元数的平方差减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果所得到的。
基于ENVI的遥感影像监督分类方法的研究
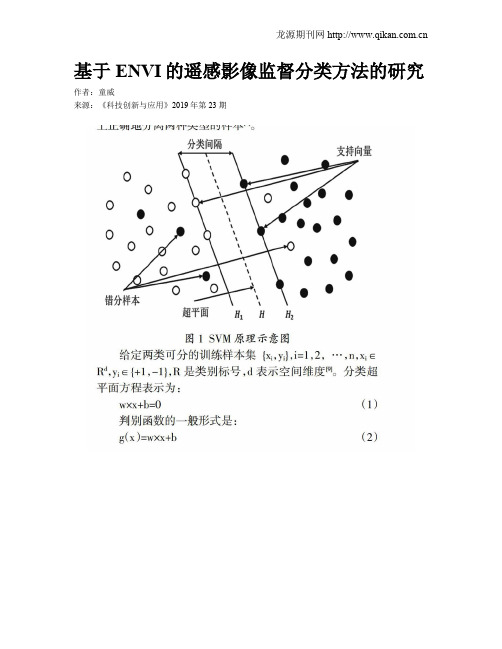
基于ENVI的遥感影像监督分类方法的研究作者:童威来源:《科技创新与应用》2019年第23期摘; 要:随着遥感技术的发展和遥感图像采集方式的多样性,对遥感图像处理技术的要求更高。
文章介绍了三种常见的监督分类算法:支持向量机、最大似然法、BP神经网络;并利用上述三种算法对南泥湾地区同一幅SuperView-1遥感影像进行了分类,获得分类解果并评估准确性;然后对三种算法进行了比较,分析三种算法的优缺点,得出支持向量机分类精度最低,最大似然法次之,神经网络最高;最后得出结论,BP神经网络是一种较为优良的遥感影像分类算法。
关键词:监督分类;支持向量机;最大似然法;BP神经网络;遥感影像中图分类号:P237 文献标志码:A 文章编号:2095-2945(2019)23-0006-04Abstract: With the development of remote sensing technology and the diversity of remote sensing image acquisition methods, there is higher demand for remote sensing image processing technology. This paper introduces three common supervised classification algorithms: support vector machine, maximum likelihood method and BP neural network. The same SuperView-1 remote sensing image in Nanniwan area is classified by using the above three algorithms, and the classification results are obtained and the accuracy is evaluated. Then, the three algorithms are compared, and the advantages and disadvantages of the three algorithms are analyzed. It is concluded that the classification accuracy of support vector machine is the lowest, the maximum likelihood method is the second, and the neural network is the highest. Finally, it is concluded that BP neural network is an excellent remote sensing image classification algorithm.Keywords: supervised classification; support vector machine; maximum likelihood method; BP neural network; remote sensing image引言隨着遥感技术的迅速发展,遥感图像采集方法也越来越多样化,其应用也越来越广泛。
遥感影像分类envi
遥感课程教学实验之二:遥感影像分类实验二遥感影像的分类遥感影像的监督分类实验目的理解计算机图像分类的基本原理以及监督分类的过程,学会利用遥感图像处理软件对遥感图像进行分类的方法。
*实验内容1、遥感图像分类原理。
2、遥感图像监督分类。
3、最大似然法分类•实验条件电脑、ENVI4.5软件。
厦门市TM遥感影像。
*实验步骤1、启动ENVI软件,从文件菜单打开多波段影像文件,从可用波段列表中装载彩色或假色影像,显示遥感影像。
2、从主图像窗口的工具Tools → RegiOn Of Interest → Rol Tools;3、在自动打开的ROI Tools窗口中,设定ROI_TyPe为Polygon ”(多边形),选定样本采集的窗口类型,用Zoo m(缩放窗口)进行采集。
ENVl4、在选定的窗口如Zoom用鼠标左键画出样本区域,在结束处击鼠标右键二次,样本区域被红色充填,同时Rol Tools窗口中显示采集样本的信息。
采集新的样本点击NeW RegiOn”,重新上述步骤进行多个地物样本采集。
BrUr- 1∙≡t> BAE βtj UD ∙"⅛∙⅛> ≡⅛,5、从ENV主菜单中,选CIaSSifiCation > SUPerViSed > MaXimUm Likelihood ;或在端元像元采集对话框Endmember Collection 中选择Algorithm >MaximumLikelihood 进行最大似然法分类。
6、在出现CIaSSifiCation InPUt File 对话框中,选择输入影像文件,出现MaXimUmLikelihood ParameterS 对话框。
7、输入常规的分类参数。
设定一个基于似然度的阈值(Set PrPbabiIity ThreShold ):如不使用阈值,点击None”按钮。
要对所有的类别使用同一个阈值,点击Si ngle Value "按钮,在PrObabiIityThreShold ”文本框中,输入一个0到1之间的值。
ENVI中掩膜掩膜操作及影像分类教程
ENVI中掩膜掩膜操作及影像分类教程一、ENVI中的掩膜操作1.矢量掩膜矢量掩膜是指利用矢量图层作为掩膜对遥感影像进行遮罩。
在ENVI 中,可以将矢量图层导入后,选择“File -> Open -> Raster”命令,导入需要进行掩膜的遥感影像。
然后在“Raster Manager”对话框中,选中要进行掩膜的影像,并选择“Processing -> Mask -> BY Vector”命令。
在弹出的“Mask Parameters”对话框中,选择要使用的矢量图层,并设定输出掩膜后的文件名和路径。
2.栅格掩膜栅格掩膜是指利用另一个栅格影像作为掩膜对目标遥感影像进行遮罩。
在ENVI中,可以选择“File -> Open -> Raster”命令,导入需要进行掩膜的遥感影像。
然后在“Raster Manager”对话框中,选中要进行掩膜的影像,并选择“Processing -> Mask -> BY Raster”命令。
在弹出的“Mask Parameters”对话框中,选择要使用的栅格图层,并设定输出掩膜后的文件名和路径。
二、ENVI中的影像分类1.颜色转换在ENVI中进行影像分类前,需要对遥感影像进行颜色转换,将影像的不同波段转换为RGB彩色图像,以便于观察和分析。
在ENVI中,可以选择“Display -> Color”命令,打开“Display Color Table”对话框,选择要显示的波段,并设置彩色表。
2.基于统计的分类方法基于统计的分类方法是根据各像元的统计特征进行分类的方法,常见的方法有最大似然法、最小距离法、支持向量机等。
在ENVI中,可以选择“Classification -> Supervised -> Maximum Likelihood”命令,打开“Maximum Likelihood Classification”对话框,根据实际需求设置各项参数,并进行分类。
envi遥感图像监督分类与非监督分类
envi遥感图像监督分类监督分类,又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。
它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。
遥感影像的监督分类一般包括以下6个步骤,如下图所示:详细操作步骤第一步:类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理。
这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。
启动ENVI5.1,打开待分类数据:can_tmr.img。
以R:TM Band 5,G: TM Band 4,B:TM Band 3波段组合显示。
通过目视可分辨六类地物:林地、草地/灌木、耕地、裸地、沙地、其他六类。
第二步:样本选择(1)在图层管理器Layer Manager中,can_tmr.img图层上右键,选择"New Region Of Interest",打开Region of Interest (ROI) Tool面板,下面学习利用选择样本。
1)在Region of Interest (ROI) Tool面板上,设置以下参数:ROI Name:林地ROI Color:2)默认ROIs绘制类型为多边形,在影像上辨别林地区域并单击鼠标左键开始绘制多边形样本,一个多边形绘制结束后,双击鼠标左键或者点击鼠标右键,选择Complete and Accept Polygon,完成一个多边形样本的选择;3)同样方法,在图像别的区域绘制其他样本,样本尽量均匀分布在整个图像上;4)这样就为林地选好了训练样本。
利用ENVI软件处理遥感影像(精)
科技信息1.ENVI 软件简介ENVI 全称是 The Environment for Visualizing Images , 是美国 ITT VIS (ITT Visual Information Solutions 公司的旗舰产品, 是由遥感领域的科学家采用交互式数据语言 IDL(InteractiveData Language 开发的一套功能强大的遥感影像处理软件。
它是快速、便捷、准确地从影像中提取信息的首屈一指的软件工具。
目前, 众多的影像分析师和科学家选择 ENVI 软件从遥感影像中提取信息。
ENVI 软件已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防安全、地球科学、公用设施管理、遥感工程、水利、海洋、勘察测绘和城市规划等领域。
2. 影像校正由于遥感器本身的内部结构、外部因素 (卫星的姿态、轨道、地球的运动和形状等等原因都可能引起影像的几何变形, 这叫几何失真。
为了纠正这些影像变形, 所以要对影像进行几何纠正。
而进行几何纠正通常是利用影像配准来实现的, 也就是在同一区域里利用基准影像 (或者地图对另一幅影像的校准, 以使两幅影像中的同名像元配准。
由此也可以清楚地看到影像配准的目的,就是使得我们能够获得比较准确的影像中的每一个像元所对应的地面的位置,这样在进行定性遥感中才能使得影像之间具有可比性,在定量遥感中才能使得我们能够确定具体目标。
在影像校正过程中, 首先是要选择所谓的地面控制点 (GCP , 这也是影像校正最关键、工作量最大的一步。
原则上 GCP 点的分布要求均匀, 并且数量要多, 这样校正的可靠性才比较高。
选择的 GCP 点一定是要在影像上容易辨识的, 地面上最好可以实测, 具有较固定的特征, 不会随时间的变化而变化的点。
本文实际采用某区域遥感得到的 SPOT 影像和 TM 影像,分别为 SPOTA 、TMA 、 SPOTB 、 TM B , 以所要分析的影像为例, 是选用 SPOT 影像为基准, 校正TM 影像, 分别打开 SPOT 影像和 TM 影像, 采用 ENVI 软件中的 Image to Image 校正功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥感课程教学实验之二:
遥感影像分类
实验二遥感影像的分类遥感影像的监督分类
•实验目的
理解计算机图像分类的基本原理以及监督分类的过程,学会利用遥感图像处理软ENVI
件对遥感图像进行分类的方法。
•实验内容
1、遥感图像分类原理。
2、遥感图像监督分类。
3、最大似然法分类
•实验条件
电脑、ENVI4.5软件。
厦门市TM遥感影像。
•实验步骤
1、启动ENVI软件,从文件菜单打开多波段影像文件,从可用波段列表中装载彩色或假色
影像,显示遥感影像。
2、从主图像窗口的工具Tools →Region of Interest →ROI Tools;
3、在自动打开的ROI Tools窗口中,设定ROI_Type 为“Polygon”(多边形),选定样本采
集的窗口类型,用Zoom(缩放窗口)进行采集。
4、在选定的窗口如Zoom用鼠标左键画出样本区域,在结束处击鼠标右键二次,样本区域
被红色充填,同时ROI Tools窗口中显示采集样本的信息。
采集新的样本点击“New Region”,重新上述步骤进行多个地物样本采集。
5、从ENVI主菜单中,选 Classification > Supervised > Maximum Likelihood;或在端元
像元采集对话框 Endmember Collection中选择 Algorithm >MaximumLikelihood 进行最大似然法分类。
6、在出现Classification Input File 对话框中,选择输入影像文件,出现 Maximum
Likelihood Parameters 对话框。
7、输入常规的分类参数。
设定一个基于似然度的阈值(Set Prpbability Threshold):如不使用阈值,点击“None”
按钮。
要对所有的类别使用同一个阈值,点击“Single Value”按钮,在“Probability Threshold”文本框中,输入一个0 到1 之间的值。
似然度小于该值的像元不被分入该类。
要为每一类别设置不同的阈值:
●在类别列表中,点击想要设置不同阈值的类别。
●点击“Multiple Values”来选择它。
●点击“Assign Multiple Values”按钮。
●在出现的对话框中,点击一个类别选中它,然后在对话框底部的文本框中输入阈值。
为每
个类别重复该步骤。
最后给定输出结果的保存方式:文件或内存,当影像较大时建设保存到文件中,以免因内存不够而出错运算错误。
点击“OK”计算机开始自动分类运算。
8、在可用波段列表中显示分类图像。
•实验总结
遥感图像分类包括监督分类(Supervised)与非监督分类两大类,它是遥感影像的计算机解译的重要内容。
Supervised 分类根据训练样本类别(training classes)对图像分类,监督分类技术包括:平行六面体、最小距离、马氏距离、最大似然、波谱角(SAM)以及二进制编码。
Unsupervised 分类不需要何训练样本,用统计方法对数据集中的像元进行聚类,常用非监督分类技术包括Isodata 和K-Means。
实验介绍最大似然法分类(Maximum
Likelihood)
遥感影像分类是影像分析的一个重要内容,它是利用计算机通过对影像中不同地物的空间信息和光谱信息进行分析,选择特征,并将特征空间划分为互不重叠的子空间,然后将影像中的各个像元划归到子空间去。
而遥感影像的监督分类的主要方法是最大似然判别法,也称为贝叶斯分类,是基于图像统计的监督分类法,也是典型的和应用最广的监督分类方法。
它建立在贝叶斯准则的基础上,偏重于集群分布的统计特性。
监督分类原理:是假定训练样本数据在光谱空间的分布是服从高斯正态分布规律的,做出样本的概率密度等值线,确定分类,然后通过计算标本(像元)属于各组(类)的概率,将标本归属于概率最大的一组。
是在已知类别的训练场地上提取各类别训练样本,通过选择特征变量,确定判别函数或判别式把影像中的各个像点划归到各个给定类的分类。
遥感影像的非监督分类
•实验目的
理解遥感图像非监督分类的原理与过程,学会利用遥感图像处理软ENVI件对遥感图像进行非监督分类的方法
•实验内容
1、遥感图像非监督分类。
2、K-mean 与Isodata分类方法
•实验条件
电脑、ENVI4.5软件。
厦门市TM遥感影像。
•实验步骤
----启动ENVI软件,从文件菜单打开多波段影像文件,从可用波段列表中装载彩色或假色影像,显示遥感影像。
•
(1)K-Means 分类
1.打开遥感影像,进行标准文件选择,根据需要,选取输入文件的任意子集和掩模。
2.选择Classification --> Unsupervised --> K-Means。
3.在出现的K-Means Parameters 对话框中设置参数。
该对话框中的可选项包括:设定所分类别数(Number Class);像元变化阈值( Change Threshold )
(0~100%);用于分类的最多迭代次数( Maximum Iteretion )
4.要选择输出到磁盘文件或内存,选择“File”或“Memory”,点击“OK”,开始进行K-Means 分类。
分类原理:K-Means 非监督分类计算数据空间上均匀分布的初始类别均值,然后用最短距离技术对像元进行叠代,把它们聚集到最近的类中。
每次迭代重新计算了类别均值,且用这一新的均值对像元进行再分类。
除非限定了标准差和距离的阈值(这时,如果一些像元不满足选择的标准,他们就不参与分类),所有像元都被归并到与其最临近的类别中。
这一过程持续到每一类的变化像元数少于所选的像元变化阈值或已经到了迭代的最多次数。
(2)Isodata 分类
●打开一幅遥感影像。
●选择Classification --> Unsupervised-- > Isodata。
●在显示的ISODATA Parameters 对话框中设置参数。
可用选项包括:类别数量
的范围限定(最小值和最大值)(Number Class:Max,Min);像元变化阈值
(Change Threshold)(0~100%),当每一类的变化像元数小于阈值时,用变
化阈值来结束迭代过程。
被用来对数据进行分类的最多迭代次数( Maximum
Iteretion ),当达到阈值或迭代达到了最大次数时,分也将结束类。
●选择输出“File”或“Memory”。
点击“OK”,开始进行Isodata分类。
分类原理:Isodata 非监督分类计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元迭代聚集。
每次迭代都将重新计算均值和聚类中心,并用这一新的均值对像元进行再分类,反复迭代分类,根据限定的标准差和距离的阈值,像元都被归并到与其最临近的一
类里。
这一过程持续到每一类的像元数变化少于选择的像元变化阈值或已经到了迭代的最多
次数。
•工具条上的overly-->classfication-->选择相应的遥感影像图-->ok
•在出现的显示框内将地物名称与颜色配到一起。
点击主工具条上classification-->post classification-->comebine classes。
然后再选择相应的遥感影像图点击ok-->进行配准。
•点击工具条上classification--> post classification-->assign class colors-->在出现的显示框中点击ok,得图如下
•实验总结:
遥感图像分类包括监督分类(Supervised)与非监督分类两大类,它是遥感影像的计算机解译的重要内容。
Supervised 分类根据训练样本类别(training classes)对图像
分类,监督分类技术包括:平行六面体、最小距离、马氏距离、最大似然、波谱角(SAM)以及二进制编码。
Unsupervised 分类不需要何训练样本,用统计方法对数据集中的像元进行聚类,常用非监督分类技术包括Isodata 和K-Means。
实验介绍最大似然法分类
(Maximum Likelihood)
遥感影像分类是影像分析的一个重要内容,它是利用计算机通过对影像中不同地物的空间信息和光谱信息进行分析,选择特征,并将特征空间划分为互不重叠的子空间,然后
将影像中的各个像元划归到子空间去。
非监督分类原理:它是事先无法知道类别的先验知识,在没有类别先验知识的情况下将所有样本划为若干类别的方法。
它的基本思想是事先不知道类别的先验知识,仅根据地物的光谱特征的相关性或相似性来进行分类,再根据实地调查数据比较后确定其类别属性。