电流转速双闭环直流电机控制系统
双闭环直流调速系统特性与原理

双闭环直流调速系统特性与原理双闭环直流调速系统是一种用于控制直流电动机转速的调速系统。
它由两个闭环控制回路组成,分别是转速外环和电流内环。
其中,转速外环控制直流电机的转速,通过调节电压来控制直流电机的转矩;而电流内环则控制直流电机的电流,通过调节电压来控制直流电机的转矩。
1.稳定性:双闭环控制系统能够有效地控制直流电动机的转速和电流,使其在运行过程中保持稳定的转矩输出。
通过转速外环对转速进行控制,可以实现精确的转速调节;而电流内环则能够控制电机的电流,防止过载和短路等故障。
2.响应速度:双闭环控制系统的转速外环具有较快的响应速度,能够实现快速的转速调节。
而电流内环的响应速度则相对较慢,主要起到电机保护的作用。
3.鲁棒性:双闭环控制系统具有较好的鲁棒性,能够对外部干扰和参数变化具有一定的抗干扰能力。
通过合理的控制策略和参数调整,可以提高系统的鲁棒性。
1.转速外环控制原理:转速外环将输出电压与给定的转速进行比较,得到转速误差,并通过调节电压反馈回内环控制器中。
转速外环控制器通常采用PI控制器,根据转速误差和积分项来控制输出电压。
通过不断调节输出电压,使得转速误差趋于零,从而实现对直流电机转速的调节。
2.电流内环控制原理:电流内环控制器将输出电压与给定的电流进行比较,得到电流误差,并通过调节输出电压来控制电流。
电流内环控制器通常也采用PI控制器,根据电流误差和积分项来控制输出电压。
通过不断调节输出电压,使得电流误差趋于零,从而实现对直流电机电流的调节。
3.反馈信号处理:双闭环直流调速系统中,转速和电流测量信号需要经过滤波和放大等处理,以便传递给控制器进行计算。
滤波器通常采用低通滤波器,用于去除高频噪声,放大器则用于放大信号强度。
4.控制指令处理:由上位机或人机界面输入的控制指令需要经过处理,包括限幅、线性化等,以确保输入信号符合控制系统的要求。
处理后的指令将送入控制器,进行计算和控制输出电压。
通过双闭环直流调速系统的控制,可以实现对直流电机的转速和电流的精确调节,并具有较好的稳定性、响应速度和鲁棒性,广泛应用于工业自动化领域。
运动控制_第3章____转速、电流双闭环直流调速系统

U
*
im
,转速外环呈开环状态,
转速的变化对系统不再产生影响。在这种情况下,电流负反
馈环起恒流调节作用,转速线性上升,从而获得极好的下垂
特性,如图 3-5中的AB段虚线所示。
第二十一页,编辑于星期三:九点 二十二分。
第 3章 转速、电流双闭环直流调速系统
此时,电流
I
d
U* im ?
?
I dm
,Idm 为最大电流,是由设
差调节。
第二十页,编辑于星期三:九点 二十二分。
第 3章 转速、电流双闭环直流调速系统
1) 转速调节器饱和
在电动机刚开始起动时,突加阶跃给定信号 U*n,由于
机械惯性,转速 n很小,转速负反馈信号 Un很小,则转速偏
差电压 ΔUn=U*n-Un>0很大,转速调节器 ASR 很快达到饱和
状态, ASR的输出维持在限幅值
图 3-5 双闭环直流调速系统的静特性
第二十三页,编辑于星期三:九点 二十二分。
第3章 转速、电流双闭环直流调速系统
2) 转速调节器不饱和
当转速n达到给定值且略有超调时 (即n>n0),ΔUn=
U*n-Un<0,则转速调节器 ASR的输入信号极性发生改变,
ASR 退出饱和状态,转速负反馈环节开始起转速调节作用,
用以调节起动电流并使之保持最大值,使得转速线性变化, 迅速上升到给定值; 在电动机稳定运行时,转速调节器退 出饱和状态,开始起主要调节作用,使转速随着转速给定信 号的变化而变化,电流环跟随转速环调节电动机的电枢电流 以平衡负载电流。
第六页,编辑于星期三:九点 二十二分。
第 3章 转速、电流双闭环直流调速系统
器ACR和转速调节器 ASR的输入电压偏差一定为零,因此,
实验二转速电流双闭环直流调速系统
实验二 转速、电流双闭环直流调速系统一、实验目的1.了解转速、电流双闭环直流调速系统的组成。
2.掌握双闭环直流调速系统的调试步骤,方法及参数的整定。
3.测定双闭环直流调速系统的静态和动态性能及其指标。
4.了解调节器参数对系统动态性能的影响。
二、实验系统组成及工作原理双闭环调速系统的特征是系统的电流和转速分别由两个调节器控制,由于调速系统调节的主要参量是转速,故转速环作为主环放在外面,而电流环作为副环放在里面,可以及时抑制电网电压扰动对转速的影响。
实际系统的组成如实验图2-1所示。
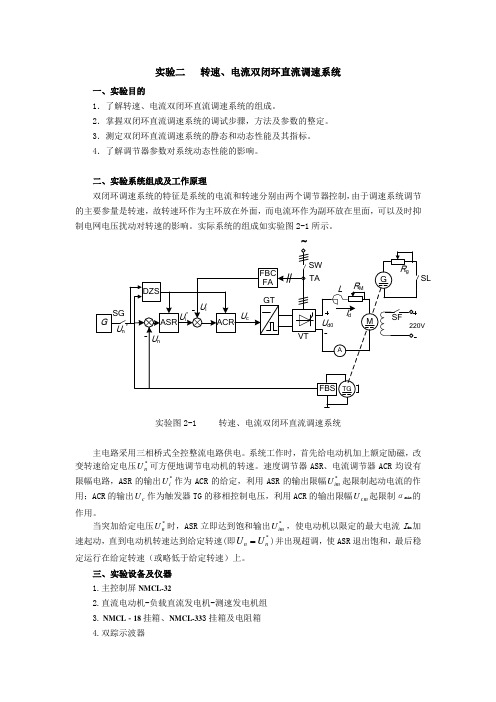
实验图2-1 转速、电流双闭环直流调速系统主电路采用三相桥式全控整流电路供电。
系统工作时,首先给电动机加上额定励磁,改变转速给定电压*n U 可方便地调节电动机的转速。
速度调节器ASR 、电流调节器ACR 均设有限幅电路,ASR 的输出*i U 作为ACR 的给定,利用ASR 的输出限幅*im U 起限制起动电流的作用;ACR 的输出c U 作为触发器TG 的移相控制电压,利用ACR 的输出限幅cm U 起限制αmin 的作用。
当突加给定电压*n U 时,ASR 立即达到饱和输出*im U ,使电动机以限定的最大电流I dm 加速起动,直到电动机转速达到给定转速(即*n n U U )并出现超调,使ASR 退出饱和,最后稳定运行在给定转速(或略低于给定转速)上。
三、实验设备及仪器1.主控制屏NMCL-322.直流电动机-负载直流发电机-测速发电机组3. NMCL -18挂箱、NMCL-333挂箱及电阻箱4.双踪示波器5.万用表四、实验内容1.调整触发单元并确定其起始移相控制角,检查和调整ASR 、ACR ,整定其输出正负限幅值。
2.测定电流反馈系数β和转速反馈系数α,整定过电流保护动作值。
3.研究电流环和转速环的动态特性,将系统调整到可能的最佳状态,画出)(t f I d =和)(t f n =的波形,并估算系统的动态性能指标(包括跟随性能和抗扰性能)。
转速、电流双闭环直流调速系统
第2章 转速、电流双闭环直流调速系统和调节器的工程设计方法2.1 转速、电流双闭环直流调速系统及其静特性采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。
电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。
在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形示于图2-1b 。
为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。
应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。
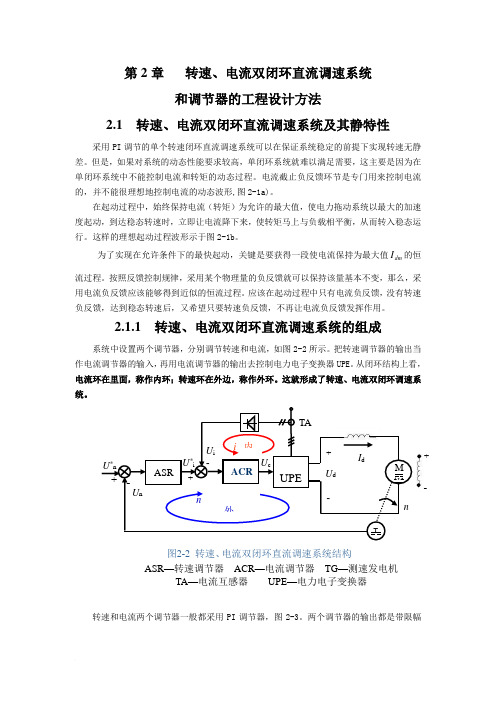
2.1.1 转速、电流双闭环直流调速系统的组成系统中设置两个调节器,分别调节转速和电流,如图2-2所示。
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
转速和电流两个调节器一般都采用PI 调节器,图2-3。
两个调节器的输出都是带限幅+TG nASRACRU*n+ -U nU iU*i+-U cTAM+-U dI dUPE-MT图2-2 转速、电流双闭环直流调速系统结构ASR —转速调节器 ACR —电流调节器 TG —测速发电机TA —电流互感器 UPE —电力电子变换器内外ni2作用的,转速调节器ASR 的输出限幅电压*im U 决定了电流给定电压的最大值,电流调节器ACR 的输出限幅电压cm U 限制了电力电子变换器的最大输出电压dm U 。
电流转速双闭环直流调速系统的工作原理

电流转速双闭环直流调速系统的工作原理(吴欢欢)(山东工商学院信息与电子工程学院电气122班山东省烟台 264005 )摘要:在工业生产中,需要高性能速度控制的电力拖动场合,直流调速系统发挥着极为重要的作用。
而采用电流转速双闭环直流调速系统,就可以充分利用电动机的过载能力获得最快的动态过程。
本次设计主要了解电流转速双闭环直流调速系统的工作原理、系统组成、静态几动态特性。
并绘出工作原理图。
关键词:双闭环控制系统、直流调速系统、ASR、直流电动机。
The working principle of current and speed double closed loop DC speed regulatingsystemWuhuanhuan(Shandong Institute of Business and Technology Yan Tai 264005)ABSTRACT:In industrial production, need to electric drive applications where high performance speed control, DC speed control system plays a very important role. While the current speed double loop speed control system, it can make full use of the overload capacity of a motor to obtain the dynamic process of the fastest. The working principle, the design of the main understanding current speed double loop DC motor control system, the static and dynamic characteristics. And draw the operating system diagram.KEYWORDS:The double closed loop control system、DC speed regulating system、ASR、continuous current motor一、引言直流电机调速,在额定转速以下,保持励磁电流恒定,可用改变电枢电压的方法实现恒转矩调速;在额定转速以上,保持电枢电压恒定,可用改变励磁的方法实现恒功率调速。
双闭环直流调速系统介绍
电流环的设计:采用PI控制器,实现对电机电流的精确控 制。
双闭环调速系统的参数整定:根据系统特性和实际需求,对 速度环和电流环的参数进行整定,以实现最佳的调速性能。
双闭环直流调速 系统的应用
双闭环调速系统在工业控制中的应用
01 电机控制:用于控制电机 的转速、位置和扭矩等参 数,实现精确控制
04
够抵抗各种干扰和故障,保持正常运行
双闭环调速系统的设计步骤
01
确定系统需求:分 析系统需求,确定 调速系统的性能指
标
02
设计调速系统结构: 选择合适的调速系 统结构,如双闭环
调速系统
03
设计控制器:设计 控制器参数,包括 比例、积分、微分
等参数
05
设计驱动电路:设 计驱动电路,包括 功率放大器和驱动
双闭环调速系统的特点
速度闭环控制:通过速度传
感器检测电机转速,实现速
01
度的精确控制
响应速度快:双闭环调速系
统能够快速响应负载变化, 03
提高系统的动态性能
精度高:双闭环调速系统能
够实现高精度的速度和位置 05
控制,满足各种应用需求
位置闭环控制:通过位置传
02 感器检测电机位置,实现位
置的精确控制
双闭环直流调速系统介 绍
演讲人
目录
01. 双闭环直流调速系统的基本 概念
02. 双闭环直流调速系统的设计 03. 双闭环直流调速系统的应用 04. 双闭环直流调速系统的发展
趋势
双闭环直流调速 系统的基本概念
双闭环调速系统的组成
01
速度环:用于控 制电机转速,实
现速度调节
转速﹑电流双闭环直流调速系统

引言目前,转速﹑电流双闭环控制直流调速系统是性能很好﹑应用最广泛的直流调速系统。
我们知道采用转速负反馈和PI调节器的单闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。
故需要引入转速﹑电流双闭环控制直流调速系统,本文着重阐明其控制规律﹑性能特点和设计方法,是各种交﹑直流电力拖动自动控制系统的重要基础。
首先介绍转速﹑电流双闭环调速系统的组成及其静特性,接着说明该系统的动态数学模型,并从起动和抗扰两个方面分析其性能和转速与电流两个调节器的作用。
在实际应用中,电动机作为把电能转换为机械能的主要设备,一是要具有较高的机电能量转换效率;二是应能根据生产机械的工艺要求控制和调节电动机的旋转速度。
电动机的调速性能如何对提高产品质量、提高劳动生产率和节省电能有着直接的决定性影响。
因此,调速技术一直是研究的热点。
长期以来,直流电动机由于调速性能优越而掩盖了结构复杂等缺点广泛的应用于工程过程中。
直流电动机在额定转速以下运行时,保持励磁电流恒定,可用改变电枢电压的方法实现恒定转矩调速;在额定转速以上运行时,保持电枢电压恒定,可用改变励磁的方法实现恒功率调速。
采用转速、电流双闭环直流调速系统可获得优良的静、动态调速特性。
在现代化的工业生产中,几乎无处不使用电力拖动装置。
轧钢机、电铲、提升机、运输机等各类生产机械都要采用电动机来传动。
随着对生产工艺,产品质量的要求不断提高和产量的增长,越来越多的生产机械能实现自动调速。
从20世纪60年代以来,现代工业电力拖动系统达到了全新的发展阶段。
这种发展是以采用电力电子技术为基础的,在世界各国的工业部门中,直流电力拖动系统至今仍广泛的应用着。
直流拖动的突出优点在于:容易控制,能在很宽的范围内平滑而精确的调速,以及快速响应等。
在一定时期以内,直流拖动仍将具有强大的生命力。
直流电机的转速电流双闭环控制

直流电机的转速电流双闭环控制The final edition was revised on December 14th, 2020.直流电机的转速电流双闭环控制摘要:本设计主要采用模拟电路实现直流电机控制的整流电源,转速调PI调节器,电流PI调节器的设计。
来实现对电机转速的控制,包括快速起动、恒速运行、堵转截止三大目标。
该设计的主要电路均采用模拟电路实现,电流环的PI 调节器用于保证快速起动,即保证电机起动时以最大负载电流起动,也即实现以最大加速度实现。
而转速调节器则用于在运行时实现转速恒定,保证带负载的能力。
两个PI调节器都采用集成运放实现。
其主要优点是克服传统意义上单环控制只能满足一方面的要求的缺陷。
关键词:电流环;转速环;PI调节器The Rotate Speed and Current Double Closed LoopFeedback Control for DC MotorAbstract: The major tasks of this design is utilizing simulating circuits to produce the rectifiering power source ,current PI regulator and rotate speed PI regulator for the DC major object of this desigen is making the DC motor started rapidly,rotating making the DC motor started rapidly with the largest load is the same to starting rapidly with the largest ,The rotate speed PI regulator make the DC mortor retated stably to any the change of the load .Both of the PI regulators use the integrated amplifier operator to accomplish the priority of this design are overcoming the defect of traditional single feedback loop.Key word: current feedback loop; rotate speed feedback loop;PI regulator目录摘要…………………………………………………………………………………错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
沈 阳 大 学
课程设计说明书 3 实验验证(MATLAB 建模与仿真)
在进行仿真时,可以按一下步骤进行 MATLAB 仿真。
NO.8
①先打开 Simulink Library Browser 窗口,新建 Simulink 仿真编辑 窗口。 ②从模块库中拖出相应模块。 ③连线并进行参数设置。 ④保存后运行,观察仿真结果。[2]
2.2.2.4 核对转速超调量 当 h=5 时,有表 2 得 n 3 7 .6 % ,不能满足设计要求。实际上, 由于表 2 是按线性计算的,而突加阶跃给定时 ASR 饱和,不符合现行 系统的前提。
表 2 典型型系统节约输入跟随性能指标 h σ tr/T ts/T k 3 52.6% 2.4 12.15 3 4 43.6% 2.65 11.65 2 5 37.7% 2.85 9.55 3 6 33.2% 3.0 10.45 1 7 29.8% 3.1 11.30 1 8 27.2% 3.2 12.25 1 9 25.0% 3.3 13.25 1 10 23.3% 3.35 14.20 1
ci I
可得 ω = K = 1 3 5 .1 ,满足设计要求。 ①晶闸管整流装置传递函数近似条件
1 1 = 1 9 6 .1 s -1 ci 满足近似条件。 3 T s 3 0 .0 0 1 7s
②忽略反电动势变化对电流环动态影响的条件。
3 1 1 =3 1 8 0 .8s -1 > ω ci ,满足近似条件。 T s T ci 0 .0 0 1 7s 0 .0 0 2s
NO.3
本部分将按工程设计方法来设计转速、电流双闭环调速系统的两 个调节器。按照设计多环控制系统的先内环后外环的一般原则,从内 环开始,逐步向外扩展。在双闭环系统中,应先设计电流调节器,然 后把整个电流环看作是转速调节系统中的一个环节,然后再设计转速 环。 双闭环调速系统的实际动态结构框图如图 2 所示。
① 电流环传递函数简化条件为
1 KⅠ 1 1 3 5 .1 -1 = s = 6 3 .7s -1 cn ,满足近似条件。 3 T i 3 0 .0 0 3 7
② 转速环小时间常数近似处理条件为
1 KⅠ 1 1 3 5 .1 -1 = s = 3 8 .7 s -1 cn ,满足近似条件。 3 T o n 3 0 .0 1
i
1 KI
:
0 .0 0 3 7 s= 0 .0 0 7 4 s
i
= 0 .5 ,则
1 2T KI
i= 2
②转速滤波时间常数 T o n : 按小时间常数近似处理,取 T on = 0.01s ③转速环小时间常数 T n : T n = 2.2.2.2 转速调节器的参数计算 按跟随和抗干扰性能都较好的原则,取 h=5,则 ASR 的超前时间 常数为 τ n = h T n = 5 0 .0 1 7 4s= 0 .0 8 7 s 可得转速环开环增益 K N = 于是 ASR 的比例系数为
n s+ 1 )
K n (τ n s+ 1 ) 1 1 .7 (0 .0 8 7s+ 1) τns 0 .0 8 7 s
3 9 6 .4s 2 (0 .0 8 7 s 1) s 2 (0 .0 1 7 4 s 1)
同电流环的截止频率可求得转速环的截止频率为
ω cn = KN ω1 = K N τ n = 3 9 6 .4 0 .0 0 8 7s -1 = 3 4 .5 s -1 满足设计要求。
图 2 双闭环调速系统的动态结构图
图中包含电流滤波、转速滤波和两个给定信号的低通滤波环节。 由于电流检测信号中常含有交流分量,为了不是它影响到调节器的输 入,我们加入低通滤波环节。这样的滤波环节其传递函数可以用一节 惯性环节来表示。滤波时间常数 T o i 按需求设定。在抑制交流分量的同 时,滤波环节也延迟了反馈信号的作用,为了平衡这个延迟的作用, 我们在给定信号通道上加入一个同等时间常数的惯性环节,称作给定 滤波环节。其作用在于让给定信号和反馈信号经过相同的延时,使二 者在时间上得到恰当的配合,从而带来设计上的方便。 由于测速发电机得到的转速反馈电压含有换向纹波,因而也需要
T s 0 .0 0 1 7 s
②电流滤波时间常数 T o i :三相桥式电路每个波头时间为 3.3ms, 为了基本滤平泊头,一般选用 1 ~ 2 T o i 3.3 3 m s 。因此 T oi 0.02s ③电流环小时间常数之和 T i= T s + T oi = 0.0037s : 按小时间常数近似 处理,取 T i= T s + T oi = 0.0037s 2.1.2.2 电流调节器的参数计算 为了让调节器零点与控制对象的大时间常数极点相消,选择
课程设计说明书 引言
NO.1
直流电动机具有良好的起、制动性能,宜在大范围内平滑调速, 在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。 近年来,高性能的交流调速技术发展很快,交流调速系统正逐步取代 直流调速系统。然而,直流拖动控制系统在理论上和实践上都比较成 熟。 从生产机械要求控制的物理量来看,电力拖动自动控制系统有调 速系统、位置随动系统(伺服系统) 、张力控制系统,多点击同步控 制系统等多种类型,而且个系统都是通过控制转速来实现的。[1] 为了达到一定的控制性能,如较高的稳态精度、较快的系统响应、较 小的超调量等性能,可以通过加入电流反馈、转速反馈来实现。 本文对双闭环直流调速系统进行调节器结构选择,参数计算和近 似校验,并进行系统仿真来验证系统的稳定性。
3.1 电流环的 MATLAB 仿真
①先打开 Simulink Library Browser 窗口,新建 Simulink 仿真编辑 窗口。 启动 Simulink Library Browser 有三种方法,第一种,点击 按钮;
第二种,在 MATLAB 命令窗口中输入“Simulink” ;第三种,点击 MATLAB 主窗口左下方的 START→Simulink→ Library Browser 图标 ②从模块库中拖出相应模块。具体方法:找到相应的模块后用鼠 标左键将该图标拖到 Simulink 仿真编辑窗口中。 ③模块摆放好后,连线,并进行参数设置。各参数如图 3 所示, 其中 PI 控制器代表 ACR,其参数分别为 P:1.013,I:33.77。 设置方法:双击该图标,修改相关参数后点击 OK 即可。 ④保存后运行,观察仿真结果。
沈 阳பைடு நூலகம்大 学
课程设计说明书 1 电流、转速双闭环直流电机控制系统的基本构成
NO.2
为了实现转速和电流两种负反馈分别起作用,在系统中设置了两 个调节器,分别调节转速和电流,二者之间实行串联连接。把转速调 节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶 闸管整流器的触发装置。从闭环结构上看,电流调节环在里面叫做内 环;转速调节环在外边叫做外环。这样就形成了转速和电流双闭环调 速系统。转速环中有一个转速调节器(ASR),转速给定信号 U * 和来自 n 测速发电机(TG)的转速反馈信号 U n 的差值 U n 输入到 ASR, ASR 的输 出信号作为电流环的给定信号 U * , 和电流反馈信号 U i 一起来控制整流 i 装置的输出, 进而控制电动机的转速。 电流内环是由电流调节器(ACR), 电力电子变换器(UPE)和电枢回路组成。ACR 的给定信号 U * 和电流反 i 馈信号 U i 作差,其差值送入 ACR。ACR 的输出来控制 UPE 的触发, 进而通过控制电枢电压来控制电机转度的目的。
NO.5
16.30% 2.4T 3.2T 51.8 0.786/T
于是 ACR 的比例系数为 K i =
K I τ i R 1 3 5 .1 0 .0 3 0 .5 1 .0 1 3 K sβ 4 0 0 .0 5
设计的 ACR 的传递函数为 W A C R (S )= 2.1.2.3 校验近似条件 电流环开环传递函数 W o p i (S )=
沈 阳 大 学
课程设计说明书
NO.4
加入滤波环节, 滤波时间常数用 T o n 表示。 其它和电流环节的道理相同。
2.1 电流调节器的设计
2.1.1 电流调节器结构的选择硬件 从稳态要求上看,希望电流无静差,以得到理想的特性,采用Ⅰ 型系统就可以了。从动态要求上看,实际系统不允许电枢电流在突加 控制作用时有太大的超调,以保证电流在动态过程中不超过允许值, 而对电网电压波动的及时抗扰作用只是次要的因素。为此,电流环应 以跟随性能为主,应选用典型Ⅰ型系统。[1] 2.1.2 电流调节器参数计算 2.1.2.1 确定时间常数 ①整流装置滞后时间常数:三相桥式整流电路的平均失控时间为
τ i = T l= 0.03s
由要求 i 5 % ,查表 1 知,应取 K T
i
i
= 0 .5 ,因此
K i=
0 .5 0 .5 1 3 5 .1s 1 T i 0 .0 0 3 7s
沈 阳 大 学
课程设计说明书
表 1 典型型系统动态跟随性能指标和频域指标与参数的关系 参数关系 KT 阻尼比ζ 超调量σ 上升时间 tr 峰值时间 tp 相角稳定裕度γ 截止频率ω c 0.25 1 0% ∞ ∞ 76.3 0.234/T 0.39 0.8 1.50% 6.6T 8.3T 69.9 0.367/T 0.5 0.707 4.30% 4.7T 6.2T 65.5 0.455/T 0.69 0.6 9.50% 3.3T 4.7T 59.2 0.596/T 1 0.5
沈 阳 大 学
h+1 2h
2 2 T n
1 + T o n = 0 .0 0 7 4 + 0 .0 1 = 0 .0 1 7 4 s KⅠ
=
6 2 5 0 .0 1 7 4