机械振动基础第2章习题
【单元练】高中物理选修1第二章【机械振动】经典练习题(2)

一、选择题1.如图甲所示,在一条张紧的绳子上挂几个摆。
当a 摆振动的时候,其余各摆在a 摆的驱动下也逐步振动起来,不计空气阻力,达到稳定时,b 摆的振动图像如图乙。
下列说法正确的是( )A .稳定时b 摆的振幅最大B .稳定时b 摆的周期最大C .由图乙可以估算出b 摆的摆长D .由图乙可以估算出c 摆的摆长D 解析:DA .a 与c 的摆长接近,它们的固有频率接近,在a 摆的驱动下,稳定时c 摆的振幅最大,所以A 错误;B .bc 摆是在a 摆的驱动下振动起来的,则b 的周期等于外力周期,稳定时abc 摆的周期都相同,所以B 错误; CD .根据单摆的周期公式2l T g=解得224T gl π= 由图像可得a 摆周期,则可以算出a 摆的摆长,估算出c 摆的摆长,所以C 错误;D 正确; 故选D 。
2.下列说法中 不正确 的是( )A .将单摆从地球赤道移到南(北)极,振动频率将变大B .将单摆从地面移至距地面高度为地球半径的高度时,则其振动周期将变到原来的2倍C .将单摆移至绕地球运转的人造卫星中,其振动频率将不变D .在摆角很小的情况下,将单摆的振幅增大或减小,单摆的振动周期保持不变C 解析:CA 、将单摆从地球赤道移到南(北)极,重力加速度增加,根据2LT gπ=,振动的周期变小,故振动频率将变大,故A 正确;B 、重力等于万有引力,故:2Mm mg Gr =,解得:2GMg r =,将单摆从地面移至距地面高度为地球半径的高度时,r 增加为2倍,故g 减小为14;根据2T π=2倍,故B 正确; C 、将单摆移至绕地球运转的人造卫星中,处于完全失重状态,不能工作,故C 错误;D 、根据2T =,振动的周期与振幅无关;在摆角很小的情况下,将单摆的振幅增大或减小,单摆的振动周期保持不变,故D 正确. 【点睛】本题关键是根据单摆的周期公2T =和重力加速度公式2GM g r =分析,注意周期与振幅无关.3.关于简谐运动,下列说法正确的是( )A .做简谐运动物体所受的回复力方向不变,始终指向平衡位置B .在恒力的作用下,物体可能做简谐运动C .做简谐运动物体速度越来越大时,加速度一定越来越小D .做简谐运动物体的加速度方向始终与速度方向相反C 解析:CA .回复力是使做简谐运动的物体返回平衡位置并总指向平衡位置的力,所以物体在远离和靠近平衡位置时的方向不同,A 错误;B .物体做简谐运动中回复力满足F x κ=-即回复力大小与位移大小成正比,方向与位移方向相反,所以在恒力的作用下,物体不可能做简谐运动,B 错误;C .做简谐运动物体速度越来越大,说明物体向着平衡位置运动,物体受回复力越来越小,加速度一定越来越小,C 正确;D .做简谐运动物体的加速度方向始终指向平衡位置,速度方向与物体运动方向相同,物体做简谐运动过程中,加速度方向和速度方向有时相同,有时相反,D 错误。
2020--2021学年人教版(新教材)物理选择性必修第一册第2章:机械振动练习含答案
2020--2021人教(新教材)物理选择性必修第一册第2章:机械振动练习含答案人教(新教材)选择性必修第一册第2章:机械振动1、关于简谐运动的位移、速度和加速度的关系,下列哪些说法正确()A.位移减小时,加速度增大,速度增大B.位移方向总跟加速度的方向相反,跟速度方向相同C.物体运动方向指向平衡位置时,速度方向跟位移方向相反;背向平衡位置时,速度方向跟位移方向相同D.物体向平衡位置运动时,做减速运动,背离平衡位置时,做加速运动2、关于机械振动的位移和平衡位置,以下说法中正确的是()A.平衡位置就是物体振动范围的中心位置B.机械振动的位移是以平衡位置为起点的位移C.机械振动的物体运动的路程越大,发生的位移也就越大D.机械振动的位移是指振动物体偏离平衡位置最远时的位移3、如图所示,弹簧振子在BC间振动,O为平衡位置,BO=OC=5 cm,若振子从B到C的运动时间为1 s,则下列说法正确的是()A.振子从B经O到C完成一次全振动B.振动周期是1 s,振幅是10 cmC.经过两次全振动,振子通过的路程是20 cmD.从B开始经过3 s,振子通过的路程是30 cm4、一个做简谐运动的物体,每次具有相同的动能时,下列说法正确的是()A.一定具有相同的势能B.一定具有相同的速度C.一定具有相同的加速度D.一定具有相同的位移5、关于单摆,下列认识中正确的是()A.一根线系着一个球悬挂起来,这样的装置就是单摆B.可以看成单摆的装置中,细线的伸缩和质量忽略不计,线长比小球直径大得多C.单摆的振动总是简谐运动D.两个单摆只要结构相同,它们的振动步调便相同6、在洗衣机把衣服脱水完毕后,电动机还要转动一会才能停下来,此时发现洗衣机先振动得比较小,然后有一阵子振动得很剧烈,然后振动慢慢减小直至停下来,其间振动剧烈的原因是()A.洗衣机没放平衡B.电动机有一阵子转快了C.电动机转动的频率和洗衣机的固有频率相近或相等D.这只是一种偶然现象7、弹簧振子以O点为平衡位置,在水平方向上的A、B两点间做简谐运动,以下说法正确的是()A.振子在A、B两点时的速度和位移均为零B.振子在通过O点时速度的方向将发生改变C.振子所受的弹力方向总跟速度方向相反D.振子离开O点的运动总是减速运动,靠近O点的运动总是加速运动8、一个做简谐运动的质点,它的振幅是4 cm,频率是2.5 Hz,该质点从平衡位置开始经过2.5 s后,位移的大小和经过的路程为()A.4 cm10 cm B.4 cm100 cmC.024 cm D.0100 cm9、做简谐运动的弹簧振子,其质量为m,最大速率为v0,若从某时刻算起,在半个周期内,合外力()A.做功一定为0B.做功一定不为0C.做功一定是12m v2D.做功可能是0到12m v2之间的某一个值10、单摆在振动过程中,当摆球的重力势能增大时,摆球的()A.位移一定减小B.回复力一定减小C.速度一定减小D.加速度一定减小11、在飞机的发展史中有一个阶段,飞机上天后不久,飞机的机翼(翅膀)很快就抖动起来,而且越抖越厉害,后来经过人们的探索,利用在飞机机翼前装一个配重杆的方法,解决了这一问题,在飞机机翼前装配重杆的目的主要是()A.加大飞机的惯性B.使机体更加平衡C.使机翼更加牢固D.改变机翼的固有频率12、如图所示是某质点做简谐运动的振动图像.根据图像中的信息,回答下列问题.(1)质点离开平衡位置的最大距离有多大?(2)质点在10 s末和20 s末的位移各是多少?(3)质点在15 s和25 s时各向什么方向运动?(4)质点在前30 s内运动的路程是多少?13、如图所示,一个轻弹簧与一个质量为m=0.5 kg的小球所构成的弹簧振子放在光滑金属杆上,已知该弹簧的劲度系数k=200 N/m,O点是弹簧振子静止时的位置,今将振子向右拉10 cm到A点,此时外力对弹簧振子做功为1 J,然后由静止释放,则它在A、B之间运动,不计其他阻力,求:(1)振子在哪点的速度最大?最大速度为多少?(2)振子在A点的位移.(3)振子在B点的加速度.2020--2021人教(新教材)选择性必修第一册第2章:机械振动练习含答案人教(新教材)选择性必修第一册第2章:机械振动1、关于简谐运动的位移、速度和加速度的关系,下列哪些说法正确()A.位移减小时,加速度增大,速度增大B.位移方向总跟加速度的方向相反,跟速度方向相同C.物体运动方向指向平衡位置时,速度方向跟位移方向相反;背向平衡位置时,速度方向跟位移方向相同D.物体向平衡位置运动时,做减速运动,背离平衡位置时,做加速运动解析:位移增大时,加速度a =-kx m 增大,但物体做减速运动,速度减小,故A错误;加速度a =-kx m ,负号表示加速度方向与位移方向总相反,靠近平衡位置时加速,位移方向与速度方向相反,故B 错误,C 正确;物体向平衡位置运动时回复力的方向与运动方向相同,做加速运动,背离平衡位置时,回复力的方向与运动方向相反,物体做减速运动,故D 错误.答案:C2、关于机械振动的位移和平衡位置,以下说法中正确的是( )A .平衡位置就是物体振动范围的中心位置B .机械振动的位移是以平衡位置为起点的位移C .机械振动的物体运动的路程越大,发生的位移也就越大D .机械振动的位移是指振动物体偏离平衡位置最远时的位移解析:平衡位置是物体可以静止的位置,所以应与受力有关,与是否为振动范围的中心位置无关,A 错误;振动位移是以平衡位置为初始点,到振动物体所在位置的有向线段,振动位移随时间而变化,振动物体偏离平衡位置最远时,振动位移最大,B 正确,D 错误;振动物体的位移与运动的路程没有关系,C 错误.答案:B3、如图所示,弹簧振子在BC 间振动,O 为平衡位置,BO =OC =5 cm ,若振子从B 到C 的运动时间为1 s ,则下列说法正确的是( )A .振子从B 经O 到C 完成一次全振动B.振动周期是1 s,振幅是10 cmC.经过两次全振动,振子通过的路程是20 cmD.从B开始经过3 s,振子通过的路程是30 cm解析:振子从B→O→C仅完成了半次全振动,所以周期T=2×1 s=2 s,振幅A=BO=5 cm,A、B错误;振子在一次全振动中通过的路程为4A=20 cm,所以两次全振动振子通过的路程为40 cm,C错误;3 s的时间为1.5T,所以振子通过的路程为30 cm,D正确.答案:D4、一个做简谐运动的物体,每次具有相同的动能时,下列说法正确的是() A.一定具有相同的势能B.一定具有相同的速度C.一定具有相同的加速度D.一定具有相同的位移答案:A5、关于单摆,下列认识中正确的是()A.一根线系着一个球悬挂起来,这样的装置就是单摆B.可以看成单摆的装置中,细线的伸缩和质量忽略不计,线长比小球直径大得多C.单摆的振动总是简谐运动D.两个单摆只要结构相同,它们的振动步调便相同解析:单摆是实际摆的理想化模型,实际摆只有在不计绳的伸缩、质量和阻力以及小球可以看作质点时才能看作单摆,A错,B正确.单摆的运动只有在摆角很小时才能看作简谐运动,C错.两单摆结构相同时,振动步调不一定相同,D错.答案:B6、在洗衣机把衣服脱水完毕后,电动机还要转动一会才能停下来,此时发现洗衣机先振动得比较小,然后有一阵子振动得很剧烈,然后振动慢慢减小直至停下来,其间振动剧烈的原因是()A.洗衣机没放平衡B.电动机有一阵子转快了C.电动机转动的频率和洗衣机的固有频率相近或相等D.这只是一种偶然现象解析:洗衣机脱水时,电动机转速很快,频率很大,可以说远大于洗衣机的固有频率,不能发生共振现象.当脱水终止时,随着电动机转速的减小,频率也在减小,肯定有一段时间,频率接近或等于洗衣机的固有频率,从而发生共振现象,洗衣机振动剧烈.答案:C7、弹簧振子以O点为平衡位置,在水平方向上的A、B两点间做简谐运动,以下说法正确的是()A.振子在A、B两点时的速度和位移均为零B.振子在通过O点时速度的方向将发生改变C.振子所受的弹力方向总跟速度方向相反D.振子离开O点的运动总是减速运动,靠近O点的运动总是加速运动答案:D8、一个做简谐运动的质点,它的振幅是4 cm,频率是2.5 Hz,该质点从平衡位置开始经过2.5 s后,位移的大小和经过的路程为()A.4 cm10 cm B.4 cm100 cmC.024 cm D.0100 cm答案:B9、做简谐运动的弹簧振子,其质量为m,最大速率为v0,若从某时刻算起,在半个周期内,合外力()A.做功一定为0B.做功一定不为0C.做功一定是12m v2D.做功可能是0到12m v2之间的某一个值解析:弹簧振子过半个周期一定运动到关于平衡位置对称的位置处,两处速度大小相等,由动能定理知合外力做功为0,A正确.答案:A10、单摆在振动过程中,当摆球的重力势能增大时,摆球的()A.位移一定减小B.回复力一定减小C.速度一定减小D.加速度一定减小解析:单摆在振动过程中,当摆球的重力势能增大时,摆球的位移变大,回复力变大,加速度变大,速度减小,C对.答案:C11、在飞机的发展史中有一个阶段,飞机上天后不久,飞机的机翼(翅膀)很快就抖动起来,而且越抖越厉害,后来经过人们的探索,利用在飞机机翼前装一个配重杆的方法,解决了这一问题,在飞机机翼前装配重杆的目的主要是()A.加大飞机的惯性B.使机体更加平衡C.使机翼更加牢固D.改变机翼的固有频率解析:飞机的机翼(翅膀)很快抖动起来,是因为驱动力的频率接近机翼的固有频率,机翼发生共振,在飞机机翼前装配重杆,是为了改变机翼的固有频率,使驱动力的频率远离机翼的固有频率,选项D正确.答案:D12、如图所示是某质点做简谐运动的振动图像.根据图像中的信息,回答下列问题.(1)质点离开平衡位置的最大距离有多大?(2)质点在10 s末和20 s末的位移各是多少?(3)质点在15 s和25 s时各向什么方向运动?(4)质点在前30 s内运动的路程是多少?解析:(1)质点离开平衡位置的最大距离等于质点的最大位移的大小,由题图看出,此距离为20 cm.(2)质点在10 s末的位移x1=20 cm,20 s末的位移x2=0.(3)15 s末质点位移为正,15 s后的一段时间,位移逐渐减小,故质点在15 s末向负方向运动,同理可知,25 s末质点也向负方向运动.(4)前30 s质点先是由平衡位置沿正方向振动了20 cm,又返回平衡位置,最后又到达负方向20 cm处,故30 s内运动的总路程为60 cm.答案:(1)20 cm(2)20 cm0(3)负方向负方向(4)60 cm13、如图所示,一个轻弹簧与一个质量为m=0.5 kg的小球所构成的弹簧振子放在光滑金属杆上,已知该弹簧的劲度系数k=200 N/m,O点是弹簧振子静止时的位置,今将振子向右拉10 cm到A点,此时外力对弹簧振子做功为1 J,然后由静止释放,则它在A、B之间运动,不计其他阻力,求:(1)振子在哪点的速度最大?最大速度为多少?(2)振子在A 点的位移.(3)振子在B 点的加速度. 解析:(1)由于弹簧振子在运动过程中满足机械能守恒,故在平衡位置O 点的速度最大,由题意知:外力做的功转化为系统的弹性势能,该势能又全部转化成振子的动能,即W =12m v 2解得:v =2Wm =2×10.5 m/s =2 m/s. (2)振子在A 点的位移大小为x =10 cm ,方向由O 指向A.(3)由于振动的振幅为10 cm ,故在B 点的位移大小是10 cm ,即弹簧压缩10 cm ,此时回复力的大小F =kx =200×0.1 N =20 N ,即振子所受到的合外力大小为20 N ,由牛顿第二定律得:a =F m =200.5 m/s 2=40 m/s 2,方向由B 指向O.答案:(1)O 点 2 m/s(2)10 cm ,方向由O 指向A(3)40 m/s 2,方向由B 指向O。
初中《物理》第2章机械振动单元练习题
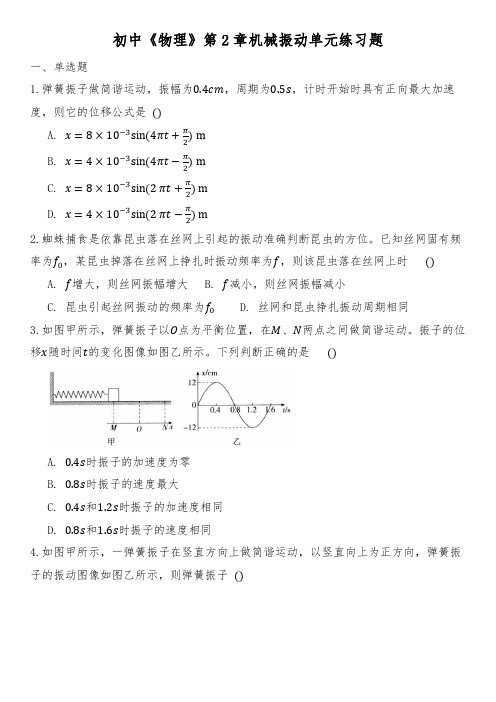
初中《物理》第2章机械振动单元练习题一、单选题1.弹簧振子做简谐运动,振幅为0.4cm,周期为0.5s,计时开始时具有正向最大加速度,则它的位移公式是()) mA. x=8×10−3sin(4πt+π2) mB. x=4×10−3sin(4πt−π2) mC. x=8×10−3sin(2 πt+π2) mD. x=4×10−3sin(2 πt−π22.蜘蛛捕食是依靠昆虫落在丝网上引起的振动准确判断昆虫的方位。
已知丝网固有频率为f0,某昆虫掉落在丝网上挣扎时振动频率为f,则该昆虫落在丝网上时()A. f增大,则丝网振幅增大B. f减小,则丝网振幅减小C. 昆虫引起丝网振动的频率为f0D. 丝网和昆虫挣扎振动周期相同3.如图甲所示,弹簧振子以O点为平衡位置,在M、N两点之间做简谐运动。
振子的位移x随时间t的变化图像如图乙所示。
下列判断正确的是()A. 0.4s时振子的加速度为零B. 0.8s时振子的速度最大C. 0.4s和1.2s时振子的加速度相同D. 0.8s和1.6s时振子的速度相同4.如图甲所示,一弹簧振子在竖直方向上做简谐运动,以竖直向上为正方向,弹簧振子的振动图像如图乙所示,则弹簧振子()A. 频率为2.0HzB. 振幅为0.4mC. 0~0.5s内,动能逐渐减小D. t=0.5s与t=1.5s时,振子的位移相同5.甲、乙两单摆的振动图像如图所示,由图像可知()A. 甲、乙两单摆的周期之比是3:2B. 甲、乙两单摆的摆长之比是2:3C. t b时刻甲、乙两单摆的摆球速度相同D. t a时刻甲、乙两单摆的摆角不相等6.如图所示为两个单摆做受迫振动的共振曲线,则下列说法正确的是()A. 两个单摆的固有周期之比为TⅠ:TⅡ=5:2B. 若两个受迫振动在地球上同一地点进行,则两单摆摆长之比为LⅠ:LⅡ=4:25C. 图线Ⅱ对应的单摆若是在地面上振动,则该摆摆长约为2mD. 若两个受迫振动分别在月球上和地球上进行,且摆长相等,则图线Ⅱ是月球上的单摆的共振曲线7.“单摆”是一种理想化模型,如图所示,长为l的轻绳下端拴着一个可视为质点的小球,上端固定在倾角为θ的光滑斜面上,这个装置也可以等效为“单摆”。
《机械振动基础》第二章
已知 A = ( aij ) n× n , Aij 为 aij的代数余子式 , 则
A11 A adjA = 12 ⋮ A1n
A21 A22 ⋮ A2 n
⋯ ⋯ ⋯
An1 An 2 ⋮ Ann
预备知识-线性代数与矩阵理论 预备知识-
【矩阵乘积的逆】 矩阵乘积的逆】
d 21 k2 (d11 − d 21 )
F2 = 0
k 2 + k3 d11 = k1k2 + k1k3 + k2 k3
k3d 21
m2
k2 (d11 − d 21 ) − k3d 21 = 0
k2 d 21 = k1k2 + k1k3 + k2 k3
2.2:建立系统运动微分方程的方法 2.2:建立系统运动微分方程的方法
ɺɺ ɺ ɺ ɺ mu1 = −k1u1 + k2 (u2 − u1 ) − c1u1 + c2 (u2 − u1 ) + f1 (t ) 1 ɺɺ ɺ ɺ ɺ m2u2 = −k2 (u2 − u1 ) − k3u2 − c2 (u2 − u1 ) − c3u2 + f2 (t )
方程之间存在耦合 方程之间存在耦合
ɺɺ Mu + Ku = f ɺɺ Ku = −Mu + f ɺɺ u = D(−Mu + f )
ɺɺ u = −DMu + Df
EI
A M 0 cos t
l
EI
l u2
m
u1
(1)利用Castigliano第二定理计算刚架端点的柔度系数得到柔 (1)利用Castigliano第二定理计算刚架端点的柔度系数得到柔 利用Castigliano第二定理 度矩阵D 度矩阵D Castigliano定理 定理: Castigliano 定理 : 系统的势能对力的偏导数等于此力的作用点 沿力的方向的位移。 沿力的方向的位移。 (2)计算外力矩作用下刚架端部的动位移 (2)计算外力矩作用下刚架端部的动位移
(好题)高中物理选修一第二章《机械振动》测试题(含答案解析)(3)

一、选择题1.(0分)[ID :127387]如图所示,曲轴上挂一个弹簧振子,转动摇把,曲轴可带动弹簧振子上下振动。
开始时不转动摇把,让振子自由振动,测得其频率为2Hz 。
现匀速转摇把,转速为240r/min 。
则( )A .当振子稳定振动时,它的振动周期是0.5sB .当振子稳定振动时,它的振动频率是4HzC .当转速增大时,弹簧振子的振幅增大D .振幅增大的过程中,外界对弹簧振子做负功2.(0分)[ID :127386]如图所示,一根用绝缘材料制成的劲度系数为k 的轻弹簧左端固定,右端与质量为m 、带电荷量为+q 的小球相连,静止在光滑绝缘的水平面上,在施加一个场强为E 、方向水平向右的匀强电场后,小球开始做简谐运动,那么( )A .小球完成一次全振动的过程电场力冲量等于零B .小球到达最右端时,弹簧的形变量为2qE kC .小球做简谐运动的振幅为2qE kD .运动过程中小球的电势能和弹簧的弹性势能的总量不变3.(0分)[ID :127376]如图甲所示,弹簧振子以O 点为平衡位置,在光滑水平面上的A 、B 两点之间做简谐运动,A 、B 分居O 点的左右两侧的对称点。
取水平向右为正方向,振子的位移x 随时间t 的变化如图乙所示的正弦曲线,下列说法正确的是( )A .0.6s t =时,振子在O 点右侧6cm 处B .振子0.2s t =和 1.0s t =时的速度相同C . 1.2s t =时,振子的加速度大小为223πm/s 16,方向水平向右 D . 1.0s t =到 1.4s t =的时间内,振子的加速度和速度都逐渐增大4.(0分)[ID :127371]如图是甲、乙两个单摆做简谐运动的图象,以向右的方向作为摆球偏离平衡位置位移的正方向,从t =0时刻起,当甲第一次到达右方最大位移处时,乙在平衡位置的( )A .左方,向右运动B .左方,向左运动C .右方,向右运动D .右方,向左运动 5.(0分)[ID :127369]如图所示,弹簧振子在A 、B 之间做简谐运动.以平衡位置O 为原点,建立Ox 轴.向右为x 轴的正方向.若振子位于B 点时开始计时,则其振动图像为( )A .B .C .D .6.(0分)[ID :127365]如图所示,两长方体木块A 和B 叠放在光滑水平面上,质量分别为m 和M ,A 与B 之间的最大静摩擦力为0f ,B 与劲度系数为k 的水平轻质弹簧连接构成弹簧振子。
机械振动第2章(习题)

1 / 21第二章 单自由度系统习题2.1 弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:2n=g/δ运动微分方程(式2.5):x +2nx=0初始条件:x (0)=3δ,x(0)=0 由式2.8有:A=2020)(ωnxx +=3δ=arctgnx xω00 =0由式2.7有: 响应:x =3δcos(δg t)2.2 弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:ω2n =g/δ=9.8/0.2=49运动微分方程(式2.5):x +ω2n x=0 初始条件:x (0)=-0.2,x(0)=0 由式2.8有:振幅:A=2020)(ωnxx +=0.2ϕ=arctgnx xω00 =0由式2.7有: 响应:x=0.2cos(7t) 周期:T=2/ωn弹簧刚度:k=mg/δ=19.8/0.2=49(N/m)最大弹簧力:F Smax =-kA=-490.2=9.8(N)2.3 重物m l 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物m 2从高度为h 处自由落到m l 上而无弹跳,如图T —2.3所示,求其后的运动。
图 T —2.3解:ω2n =k/(m 1+m 2)运动微分方程(式2.5):x+2nx=0初始条件:x (0)=- m 2g/km 2gh=21(m 1+m 2)x2(0)⇒ x (0) (以下略)2.4 一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆3 / 21心受到一弹簧k 约束,如图T —2.4所示,求系统的固有频率。
图 T —2.4解:系统的势能:U=21kr 2θ2系统的动能:E t =21I •θ2+21mr2•θ2由d(U+E t )=0得:(I+ mr 2)••θ+kr 2θ=0ω2n =22m r I kr +2.5 均质杆长L 、重G ,用两根长h 的铅垂线挂成水平位置,如图T —2.5所示,试求此杆相对铅垂轴OO 微幅振动的周期。
机械振动基础课后习题解答_第2章习题
0.5
1
1
1
1 1/ 3
u1 (t ) u2 (t)
8 4
/ /
9 9
cos(
k 2m
)t
1/9 1/ 9
cos(
2k )t m
(3) 求结构的稳态响应
m1u1(t) k1(u1(t) u2 (t)) m2u2 (t) k1(u1(t) u2 (t)) k2 (u2 (t) v(t))
0 0
(K 2M)φ 0
1
1
2 2
k J
,
2
1
2k 2 J
1 1
φ1
1/
2
,
φ2
1/
2
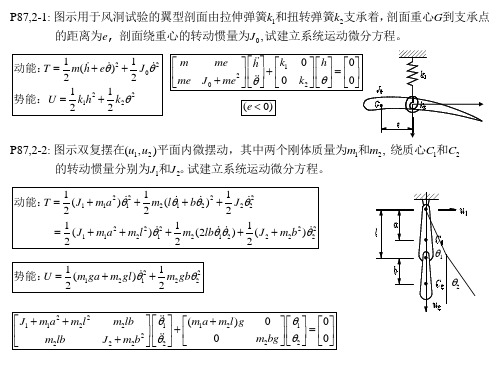
P88,2-6: 不计刚杆质量,按图示坐标建立运动微分方程,并求出固有频率和固有振型。
系统动能:T
1 2
mu12
1 2
2mu22
系统势能:U
1 2
k (2u1
u2 )2
1 2
k (2u2
P87,2-1: 图示用于风洞试验的翼型剖面由拉伸弹簧k1和扭转弹簧k2支承着,剖面重心G到支承点 的距离为e, 剖面绕重心的转动惯量为J0,试建立系统运动微分方程。
动能:T
1 2
m(h e )2
1 2
J0 2
势能:U
1 2
k1h2
1 2
k2 2
m me
J0
me me2
h
k1
0
(e 0)
)
Re
2k k
k k
2
m
0
0 m
-1
i
f1
f2
eit
u* (t )
1
广西专版新教材高中物理第2章机械振动2简谐运动的描述课后习题新人教版选择性必修第一册
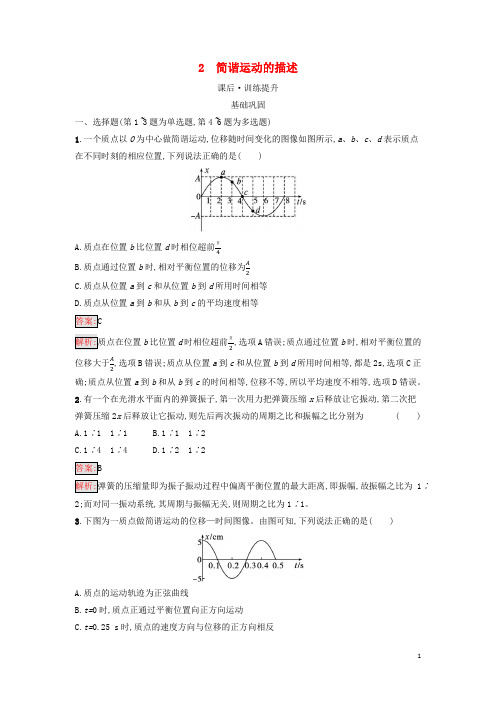
2简谐运动的描述课后·训练提升基础巩固一、选择题(第1~3题为单选题,第4~6题为多选题)1.一个质点以O为中心做简谐运动,位移随时间变化的图像如图所示,a、b、c、d表示质点在不同时刻的相应位置,下列说法正确的是()A.质点在位置b比位置d时相位超前π4B.质点通过位置b时,相对平衡位置的位移为A2C.质点从位置a到c和从位置b到d所用时间相等D.质点从位置a到b和从b到c的平均速度相等b比位置d时相位超前π,选项A错误;质点通过位置b时,相对平衡位置的2,选项B错误;质点从位置a到c和从位置b到d所用时间相等,都是2s,选项C正位移大于A2确;质点从位置a到b和从b到c的时间相等,位移不等,所以平均速度不相等,选项D错误。
2.有一个在光滑水平面内的弹簧振子,第一次用力把弹簧压缩x后释放让它振动,第二次把弹簧压缩2x后释放让它振动,则先后两次振动的周期之比和振幅之比分别为() A.1∶11∶1 B.1∶11∶2C.1∶41∶4D.1∶21∶2,即振幅,故振幅之比为1∶2;而对同一振动系统,其周期与振幅无关,则周期之比为1∶1。
3.下图为一质点做简谐运动的位移—时间图像。
由图可知,下列说法正确的是()A.质点的运动轨迹为正弦曲线B.t=0时,质点正通过平衡位置向正方向运动C.t=0.25 s时,质点的速度方向与位移的正方向相反D.质点运动过程中,两端点间的距离为0.1 m,运动轨迹是一条直线,离开平衡位置的位移与时间的关系图像才是正弦曲线(余弦曲线),选项A错误;由题图可知,t=0时,质点正通过正向最大位移处向负方向运动,选项B错误;由题图可知,t=0.25s时,质点的速度方向沿x轴正方向,与位移的正方向相同,选项C错误;质点运动过程中,两端点间的距离d=0.05m+0.05m=0.1m,选项D正确。
4.如图所示,弹簧振子以O为平衡位置,在BC间振动,则()A.B→O→C→O→B为一次全振动B.O→B→O→C→B为一次全振动C.C→O→B→O→C为一次全振动D.OB的大小不一定等于OC为平衡位置,B、C为两侧最远点,则从B起始经O、C、O、B路程为振幅的4倍,选项A正确;若从O起始经B、O、C、B路程为振幅的5倍,超过一次全振动,选项B错误;若从C 起始经O、B、O、C路程为振幅的4倍,选项C正确;因弹簧振子系统不考虑摩擦,所以振幅一定,选项D错误。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
8l d 22 = 3EI
Hale Waihona Puke 3l3 1 柔度矩阵:D = 3 E I 2 .5
2 .5 8
刚 度 矩 阵 :K =
6E I 16 7l 3 5
5 2
m 运动方程: 1 0
0 u1 6 EI u + 7l 3 m2 2
16 5 u1 f1 sin ωt 5 2 u = 0 2
系 统 的 固 有 频 率 : ω 1 = 1 8 9 (rad /s), ω 2 = 9 7 3 .7 7 (rad /s)
H 1 1 ( ω )的 分 子 :
12 EI ω 2m2 = 0 3 7l
反 共 振 频 率: ω = 12 EI = 4 4 3 .6 (rad /s) 7l 3m 2
30 EI H 2 1 (ω )的 分 子 : 7l 3
P89,2-15: 双层建筑结构简化模型如图所示, 其中m1 = m, m2 = 2m, 剪切刚度k1 = k , k2 = 2k. (1) 求结构的固有频率和固有振型 (2) 若在m1上作用力产生单位位移,然后无初速度释放,求其自由响应; (3) 由于地震,基础产生水平方向运动v = v sin ωt , 求结构稳态响应.
P88,2-3: 求图示系统的固有频率和固有振型.
m 0 u1 4k 0 2m u + 3k 2 3k u1 0 = 5k u 2 0
( K ω 2 M )φ = 0
ω1 = k / m , ω2 = 11k / 2m
1 1 φ1 = , φ2 = 1 0.5
0.946 1 φ1 = , φ2 = 1 0.757
ω1 = 7.3384(rad/s), ω2 = 48.1783(rad/s)
P88,2-9: 图示均匀刚杆质量为m,求系统的固有模态.
1 2 ma θ = k1b2θ k2 (aθ u) a 3 mu = k2 (u aθ )
1
1 u (t ) θ (t ) = 0.618 l
1 1 u (t ) k k = 0.618 0.07236l cos(0.437 )t + 1.618 0.02764l cos(1.144 )t θ (t ) m m l l
P89,2-14: 图示悬臂梁宽b = 0.036m, 厚h = 2.5 × 103 m, 长2l = 0.14m, 材料弹性模量E = 2.1×102 GPa. 梁上安装有两个重块m1 = 0.5kg和m1 = 0.25kg, 梁的质量可以忽略. (1) 求系统的固有频率 (2) 当简谐力 f1 sin ωt 作用于 m1 时, 不计阻尼,求反共振频率f a.
P88,2-4: 图示电车由两节质量均为2.28 ×104 kg的车厢组成, 中间连接器的刚度为 2.86 ×106 N/m. 求电车振动的固有频率和固有振型.
m 0 u1 k 0 m u + k 2
k u1 0 u = 0 k 2
( K ω 2 M )φ = 0
Φ = [φ1
φ2 ]
0.707 0.707 φ1 = , φ2 = 1 1
ω1 = 0.7654
g g , ω2 = 1.8478 l l
θ Θ0 = 0 0
θ (t ) 0.707 0.707 g g Θ (t ) = 1 = 0.707θ 0 cos(0.7654 )t 0.707θ 0 cos(1.8478 )t θ 2 (t ) 1 1 l l
1 2 1 ml 2 2 系统势能:U = 1 k(u lθ )2 + 1 k(u + lθ )2 系统动能:T = mu + θ 2 2 2 4 2 2 12
0 u 2k kl / 4 u 0 m + 运动方程: 0 ml 2 /12 θ kl / 4 5kl 2 /16 θ = 0
m1 (2l )2θ1 = k1lθ1 l k2 (2lθ1 2lθ2 ) 2l m (2l )2θ = k (2lθ 2lθ ) 2l
2 2 2 2 1
m 运动方程: 1 0
0 θ1 k1 / 4 + k2 + k m2 θ 2 2
k2 θ1 0 θ = 0 k2 2
P89,2-13: 图示刚杆质量不计,并求系统的固有频率和固有振型.如果将杆向下平移0.1l , 求 突然释放后的自由振动.
2 mu (t ) = ku (t ) k (u (t ) lθ (t )) 2 ml 2θ (t ) = kl (u (t ) lθ (t ))
0 u 2k 2m 运动方程: 0 2ml 2 θ + kl
ω1 = 0, ω2 = 2k / m = 15.84 (rad/s)
1 1 φ1 = , φ2 = 1 1
P88,2-5: 求图示扭转振动系统的固有频率和固有振型.
J 0 0 u1 k + 2 J u2 k k u1 0 = 2k u2 0
P87,2-1: 图示用于风洞试验的翼型剖面由拉伸弹簧k1和扭转弹簧k2支承着, 剖面重心G到支承点 的距离为e, 剖面绕重心的转动惯量为J 0 , 试建立系统运动微分方程.
1 1 动能: = m(h + eθ ) 2 + J 0θ 2 T 2 2 1 1 势能:U = k1h 2 + k2θ 2 2 2
k u1 0 u = 2kv sin ωt 3k 2
a 设稳态解为: * (t ) = 1 sin ωt u a2
k m 0 a1 0 ω2 a = 2kv 3k 0 2m 2
k m 0 0 ω2 3k 0 2m 2kv
k k , ω2 = 1.144 m m
1 cos ω1t 1.618 0 l
kl u 0 = kl 2 θ 0
ω1 = 0.437
1 1 φ1 = 0.618 , φ2 = 1.618 l l
1 0 0.618 cos ω 2t l 1 0.1l 1.618 0 l
(1) 求结构的固有频率和固有振型
m 0 u1 k 运动方程: 0 2m u + k 2 k u1 0 = 3k u2 0
k 2k ω1 = , ω2 = 2m m
1 1 φ1 = , φ2 = 0.5 1
(2) 求结构的自由响应
(3) 求结构的稳态响应
m1u1 (t ) = k1 (u1 (t ) u2 (t )) m2u2 (t ) = k1 (u1 (t ) u2 (t )) k2 (u2 (t ) v(t ))
m 0 u1 k 运动方程: 0 2m u + k 2 k k
悬臂梁在单位力作用下的挠度公式为
x2 δ= (3 a x ), 0 ≤ x ≤ a 6EI a2 δ= (3 x a ), a ≤ x ≤ 2 l 6EI
bh3 截 面 惯 性 矩 :I = 12
2l 悬臂梁总长; a 力作用点到固定端的距离 计算柔度系数: = l d11
3
3EI
5l d 12 = 6EI
( K ω 2 M )φ = 0
2k 2k ω1 = 1 , ω2 = 1 + 2 J 2 J
1 1 φ1 = , φ2 = 1/ 2 1/ 2
P88,2-6: 不计刚杆质量,按图示坐标建立运动微分方程,并求出固有频率和固有振型.
系统动能:T = 系统势能:U = 1 1 2 mu12 + 2mu2 2 2 1 1 k (2u1 u2 ) 2 + k (2u2 u1 ) 2 2 2
2 2 2
θ θ θ 系统势能:U = mgl (1 cos θ1 ) + mgl (2 cos θ1 cos θ 2 ) ≈ mgl 2 1 + mgl (2 1 + 2 2 ) 2 2 2
2 1 θ1 g 2 0 θ1 0 运动方程: 1 1 + l 0 1 θ = 0 θ 2 2
ma 2 / 3 0 θ k1b 2 + k2 a 2 运动方程: + 0 m u k2 a
k2 a θ 0 = k2 u 0
P89,2-10: 建立图示双单摆的微振动微分方程,并求固有频率和固有振型.
系 统动能 : T = 1 1 1 1 1 m (lθ1 ) 2 + m (lθ1 + lθ2 ) 2 = 2 ml 2θ12 + ml 2θ22 + 2 ml 2θ1θ2 2 2 2 2 2
k k ω1 = 1.282 , ω2 = 2.026 m m
1 1 φ1 = , φ2 = 1.43 / l 8.42 / l
P88,2-8: 图示刚杆质量不计, 1 = 4kg, m2 = 5kg, k1 = 2 ×103 N/m, k2 = 5 × 103 N/m, 求系统 m 的固有频率和固有振型.
m 0 u1 5k 运动方程: 0 2m u + 4k 2
k ω1 = 0.81 m k ω2 = 2.62 m
4k u1 0 = 5k u2 0
1 1 φ1 = , φ2 = 1.09 0.46
P88,2-7: 已知刚杆质量为m,按图示坐标建立运动微分方程,并求出固有频率和固有振型.
θ1 θ2
1 1 势能: = ( m1 ga + m2 gl )θ12 + m2 gbθ 22 U 2 2
J1 + m1a 2 + m2l 2 m2lb
m2lb θ1 (m1a + m2l ) g + 2 0 J 2 + m2b θ 2
0 θ1 0 θ = 0 m2bg 2
ω1 = 0.7654
g g , ω2 = 1.8478 l l
0.707 0.707 φ1 = , φ2 = 1 1