自动外圆磨床自动上料系统设计(机械CAD图纸)
JZC350搅拌机总体及上料系统设计(机械CAD图纸)
设计项目计算与说明结果第一章概述1.1设计背景1.1.1混凝土搅拌机简介1.1.2搅拌机发展过程第一章概述1.1设计背景1.1.1混凝土搅拌机简介混凝土搅拌机是把水泥、砂石骨料和水混合并拌制成混凝土混合料的机械。
主要由拌筒、上料和卸料机构、供水系统、原动机、传动机构、机架和支撑装置等组成。
混凝土搅拌机,包括通过轴与传动机构连接的动力机构及由传动机构带动的滚筒,在滚筒筒体上装围绕滚筒筒体设置的齿圈,传动轴上设置与齿圈啮合的齿轮。
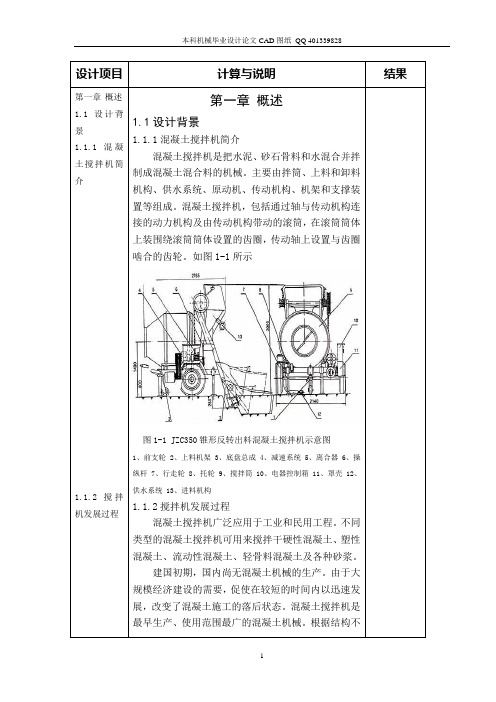
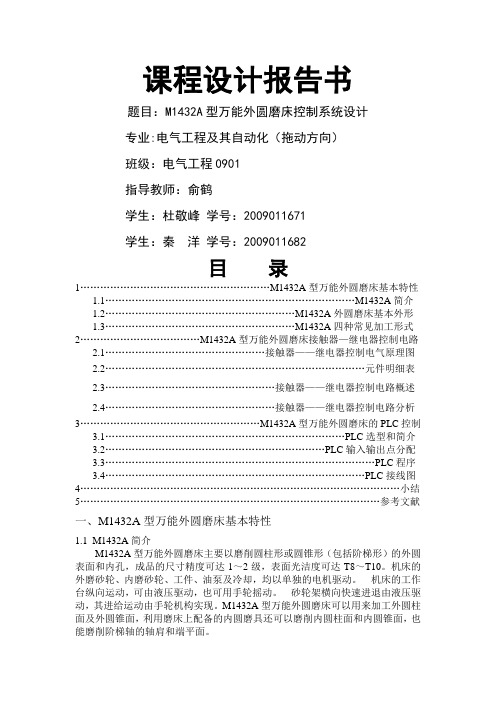
如图1-1所示图1-1 JZC350锥形反转出料混凝土搅拌机示意图1、前支轮2、上料机架3、底盘总成4、减速系统5、离合器6、操纵杆7、行走轮8、托轮9、搅拌筒 10、电器控制箱 11、罩壳 12、供水系统 13、进料机构1.1.2搅拌机发展过程混凝土搅拌机广泛应用于工业和民用工程。
不同类型的混凝土搅拌机可用来搅拌干硬性混凝土、塑性混凝土、流动性混凝土、轻骨料混凝土及各种砂浆。
建国初期,国内尚无混凝土机械的生产。
由于大规模经济建设的需要,促使在较短的时间内以迅速发展,改变了混凝土施工的落后状态。
混凝土搅拌机是最早生产、使用范围最广的混凝土机械。
根据结构不1.1.3搅拌机的发展趋势同有多种形式,其发展概况分述如下:鼓筒式搅拌机这是我国最早生产的混凝土搅拌机。
由于它的结构简单,维修方便,操作技术要求不高,工作可靠性好,因而在很长时间内成为建筑施工企业使用范围最广、数量最多的混凝土搅拌机,由于本身的自重大,生产率低,使用范围窄等原因在2000年以后基本全部淘汰。
自落式搅拌机(锥形反转出料搅拌机)这种搅拌机,我国于1965年引进国外样机的基础上开始研制,20世纪70年代初已批量生产,经过不断改进,结构上渐趋成熟,在当时取代鼓筒式搅拌机成为建筑施工企业使用量最大的机型。
这种搅拌机采用自落式搅拌原理,本设计就是要设计此种类型的搅拌机并对其改进。
强制式搅拌机从20世纪50年代初兴起后,得到了迅速的发展和推广。
【机械毕业设计】MK1332数控外圆磨床工作台结构设计【含全套CAD图纸和WORD说明书】
摘要随着制造业的迅速发展,传统的加工设备已无法承担加工高精度、复杂型面零件的要求,数控机床良好的加工精度和数控系统可满足此要求。
而国外的数控机床比较昂贵,其价格要比国内高50%~60%,结合市场调研和毕业设计的实际,进行磨床工作台结构设计。
针对数控磨床工作台存在的爬行、颤振现象,进给滚珠丝杠刚性低问题,确定了采用滚珠丝杠带动工作台,滚珠丝杠和电动机之间采用同步齿形带联接,工作台导轨贴塑,从而改善了润滑条件,同时也起到减振作用,MK1332数控外圆磨床的爬行、颤振现象得到有效解决,提高了零件加工质量;丝杠采用两端固定支承,滚动轴承背靠背组配,刚性可提高一倍。
位置检测装置采用高分辨率的脉冲编码器,通过半闭环控制测量工作台的直线位移。
工作台型面采用平面形式,减少工作台的质量、转动惯量,使系统有更快的响应特性。
本机床对提高加工质量和效率、缩短产品开发周期有积极的意义。
关键词数控磨床工作台滚珠丝杠贴塑导轨AbstractAlong with the rapid development of the manufacturing sector, the traditional processing equipment has been unable to undertake the processing precision, complex parts of the surface, NC Machine good precision and CNC machining systems can meet this requirement. Abroad CNC machine tools more expensive than domestic prices high 50% ~ 60%. combine market research and graduate of the actual design, structural design workstations Grinder. CNC Grinder against the crawling stage, flutter, feed rigid low-ball screw, determine the use of ball screw driven workstations, ball screw and motor uses synchronous belt link Guide laminating workstations, thereby improving the lubrication conditions, but also play a role in damping, MK1332 CNC Cylindrical Grinder crawl, flutter phenomenon to be an effective solution to improve the quality of the parts processing; Screw using both fixed supports, Rolling back-up, rigid be doubled. Position detection device using high-resolution pulse encoder, through half-closed loop control workstations measurement of linear displacement. Workstations using planar surface forms, reducing the quality of workstations, moment of inertia, allowing the system to have a faster response. The processing machine to improve quality and efficiency, shorten the product development cycle has a positive meaning.Keywords CNC Grinder Worktable Ball ScrewsLaminating Guide目录摘要 (I)Abstract (II)第1章绪论 (1)1.1数控加工技术 (1)1.1.1数控机床的产生和发展 (2)1.1.2数控机床的发展趋势 (2)1.2数控机床的优点 (4)1.2.1数控机床的优点 (4)1.2.2数控机床加工零件的特点 (5)1.3设计参数和方案确定 (6)1.3.1机床主要技术参数 (6)1.3.2MK1332数控外圆磨床设计参数 (6)1.3.3MK1332数控外圆磨床加工产品的主要精度 (7)1.3.4 设计方案的确定 (7)第2章数控机床的组成和分类 (9)2.1数控机床的组成 (9)2.2数控机床的分类 (9)2.2.1 按工艺用途分类 (10)2.2.2 按控制运动方式分类 (10)2.2.3按伺服系统的类型分类 (11)2.2.4按照功能水平分类 (11)第3章进给系统设计 (13)3.1工作台机构传动设计 (13)3.2滚珠丝杠螺母副 (14)3.2.1工作原理与特点 (15)3.2.2滚珠丝杠螺母副的循环方式 (16)3.2.3 滚珠丝杠副的轴向间隙消除和预加载荷 (16)3.3滚珠丝杠副的精度 (16)3.3.1滚珠丝杠当量动载荷的计算 (16)3.3.2 滚珠丝杠的选取和极限转速的计算 (19)3.3.3 滚珠丝杠副效率计算 (22)3.3.4滚珠丝杠副刚度验算 (22)第4章滚珠丝杠的支承 (24)4.1轴端支承形式的选择 (24)4.1.1滚珠丝杠轴端支承形式的选择 (24)4.1.2滚珠丝杠对轴承的要求 (25)4.1.3轴承的组配方式 (25)4.2轴承预紧力 (26)4.2.1轴承应适当的预紧,适当的预紧有助于提高轴承的工作能力 (26)4.2.2预紧与发热 (27)4.3滚珠丝杠的联接 (30)4.3.1同步齿形带的计算 (31)第5章电动机的选择和惯量匹配计算 (37)5.1最大静态切削负载转矩的计算 (37)5.2惯量匹配计算 (38)5.3最大空载加速转矩的计算 (41)5.4系统增益设计 (43)第6章导轨的选择与工作台型面的确定 (45)6.1导轨的选择 (45)6.1.1导轨的分类 (45)6.1.2导轨的间隙调整机构 (48)6.1.3 贴塑导轨设计 (49)6.2工作台型面的确定 (51)第7章机床定位精度验算 (53)结论 (606)致谢 (57)参考文献 (58)附录1 (60)附录2 (66)第1章绪论随着科学技术的飞速发展和经济竞争的日趋激烈,产品更新速度越来越快,复杂形式的零件越来越多,精度要求越来越高,多品种、中小批量生产的比重明显增加。
苹果自动去皮机机械设计(机械CAD图纸)word版
摘要现阶段我国苹果的生产相对较好,但是在加工方面和西方国家相比就有相当大的差距,在加工自动化方面更是落后。
我国现在水果罐头行业的发展相对比较乐观,并且消费者对水果罐头的需求越来越大。
水果罐头需求大,当然少不了苹果罐头,但我国现有的苹果去皮设备中存在着不少问题,比如大型设备体积庞大,加工过程苹果容易受污染,且不适合小型企业加工,另外有一部分设备需要靠人工将苹果逐个插到固定针上,这样很容易造成工人受伤事故。
本文设计的苹果自动去皮机主要适用于小型苹果罐头加工企业,不再需要人工将苹果逐个插到固定针上,而是采用自动检测系统,通过气缸将苹果插到固定针上。
有手靠近苹果托盘是机器将不动作,这样就减少了不必要的人员事故。
本设计内容主要包括苹果自动去皮机总体设计、零件设计、零件尺寸设计及计算、标准件的选择、重要部分强度校核等。
并且还绘制了所需零件的所有CAD图和PROE整装图。
关键词:水果罐头,苹果自动去皮机,设计AbstractAt the present stage, apple production in China is relatively good. But there is still a considerable gap in the aspect of processing compared with western countries, especially more backward in terms of process automation. In our country the development of canned fruit industry is recently boom recently, at the same time the demand for canned fruit is growing with more and more consumers loving them. Canned fruit is in great demand, so it is canned apple. However, there are still many troubles in our existing apple peeling devices, such as the large volume of large scale equipment, apple being vulnerable to pollution in the process procedure, as well as unsuitable for small business processing. Another drawback is that some devices depend on artificial to insert apple one by one into fixing pins, which is easy to cause injury accidents.Apple peeling machine automatically in this artical is mainly targeted at small apple canned food processing enterprises. Instead of depending on artificial to insert apples one by one into fixing pins, the design brings to automatic test system and apples are inserted into fixing pins through the cylinder. We can find out one advantage is that the machine doesn’t work if workers’ hands close to apple tray so as to reduce the unnecessary accidents and improve the security. The design mainly includes the overall design of automatic apple peeling machine, detailing design, the design and calculation of component size, the choice of the standard component, and the intensity check to important part. What’s more, all CDA chart and PROE diagram of all necessary components are drawed well.Keywords: canned fruit, apple automatic peeling machine, design目录摘要 (I)Abstract (II)1 绪论 (1)1.1 本设计研究的目的与意义 (1)1.2 现阶段国内苹果去皮方式 (1)1.3 苹果自动去皮机的研究状况及存在问题 (2)1.3.1 苹果自动去皮机的研究状况 (2)1.3.2 苹果自动去皮机存在问题 (2)1.4 本设计研究内容、方法及方向 (3)1.4.1 本设计研究内容 (3)1.4.2 本设计采用的方法 (3)1.4.3 本设计未来发展方向 (3)2 苹果自动去皮机总体方案设计 (4)2.1 苹果自动去皮机方案确定 (4)2.2 苹果自动去皮机工作原理及结构组成 (4)2.2.1 苹果自动去皮机工作原理 (4)2.2.2 苹果自动去皮机结构组成 (4)2.3 苹果自动去皮机工作流程 (4)3 苹果自动去皮机运动机构确定 (6)3.1 送料机构的确定 (6)3.1.1 送料机构方案设计 (6)3.1.2 送料机构组件的确定 (6)3.2 工作台转动机构的确定 (8)3.2.1 直齿圆锥齿轮的设计 (9)3.2.2 直齿圆柱齿轮的设计 (12)3.3 苹果自动去皮机去皮及苹果固定装置 (19)3.3.1 刀架的设计 (19)3.3.2 刀片的设计 (19)3.3.2 苹果固定装置 (20)4电机的选择 (21)4.1 确定电机类型 (21)4.2 步进电机参数 (21)5 轴设计校核及轴承的选择 (25)5.1 短轴的设计 (25)5.2 短轴的校核 (26)5.3 轴承的选择 (29)6 苹果自动去皮机仿真图 (30)结束语 (31)参考文献 (32)致谢 (33)1 绪论1.1 本设计研究的目的与意义由于水果罐头行业发展快速,且水果罐头行业发展前景相对较乐观,故不少小型水果罐头企业如雨后春笋般出现,企业要加工过罐头首要问题就是加工设备,对生产苹果罐头的企业而言,苹果自动去皮设备是重中之重,相对大型罐头企业应用的大型流水线型的生产方式,对小型加工企业并不适合,因此广大加工厂家就迫切需要有一种小型苹果自动去皮设备的出现,且该设备生产效率要高,安全性高。
自动外圆磨床自动上料系统设计(机械CAD图纸)
(4)按控制方式分:
(a)固定程序自动送料机构:控制系统是一个固定程序的控制器。程序简单,程序数少,而且是固定的,行程可调但不能任意点定位。
(b)可编程序自动送料机构:控制系统是一个可变程序控制器。其程序可按需要编排,行程能很方便改变[9]。
控制系统是支配自动送料机构按规定程序和要求进行运动的装置,他们主要用来控制:位置(点位控制或连续轨迹控制)、
时间、速度和加速度等参数。
自动送料机构与主机及其它有关装置之间的联系[3]。
2.3
按自动送料机构布局形式分可分为:架空式自动送料机构、附机式自动送料机构、落地式自动送料机构三种。此外,还有安装在自动线料道上或料道旁,实现工件上、下料、传递转位、转向等用途的自动送料机构,他们具有运动单一、结构简单,位置灵活及精度一般要求较低的特点。
在工业机器人的诸多功能中,抓取和移动是最主要的功能。这两项功能实现的技术基础是精巧的机械结构设计和良好的伺服控制驱动。本次设计就是在这一思维下展开的。根据设计内容和需求确定圆柱坐标型工业机器人,利用锥齿轮传动实现机器人的旋转,利用液压缸实现其移动以及对零件的抓取。在步进电机的控制下,机器达到精确的回转运动。
工业机器人是一种机体独立,动作自由度较多,程序可灵活变更,能任意定位,自动化程度高的自动操作机械。主要用于加工自动线和柔性制造系统中传递和装卸工件或夹具[1]。
工业机器人以刚性高的手臂为主体,与人相比,可以有更快的运动速度,可以搬运更重的东西,而且定位精度相当高,它可以根据外部来的信号,自动进行各种操作。
1.3
(1)培养学生综合分析和解决本专业的一般工程技术问题的独立工作能力,拓宽和。
M1432A万能外圆磨床头架及液压系统

毕业论文﹙设计﹚开题报告题目M1432A万能外圆磨床头架及液压系统的设计学生姓名学号所在院(系)机械工程学院专业班级机械设计制造及其自动化指导教师2008年 3月10日题目M1432A万能外圆磨床头架及液压系统的设计一、选题的目的及研究意义在国民经济各部门、人民的日常生活中,使用者各种机器设备、仪器工具,这些机器、机械、仪器和设备和工具大部分是由一定的形状和尺寸的金属零件所组成的。
生产这些零件并将它们装配成机器、机械、仪器和工具的工业,称为机械制造工业。
在机械零件的制造过程中,采用铸造、锻压、焊接、冲压等制造方法,可以获得低精度零件。
对于精度要求高、表面粗糙度小的零件,主要依靠切削加工的方法获得,尤其是加工精密零件时,需经过多道工序的切削加工才能完成。
因此,机械加工设备是机械制造业的主要加工设备。
在一般的机器制造厂中,金属切削机床所负担的加工工作量,余额占总工作量的40%~60%。
金属切削机床的技术性能直接影响机械产品的质量及其制造的经济性,进而决定着国民经济的发展水平。
机床是在人类认识和改造自然的过程中产生,又随着社会生产的发展和科学技术的进步而不断发展、不断完成的。
最原始的机床是木制的,所有运动由人力或畜力驱动,主要用于加工木料、石料和陶瓷制品的泥坯,它们实际上并不是一种完整的机器。
现代意义上的用于加工金属机械零件的机床,是在18世纪中叶开始发展起来的。
18世纪发明了机动刀架,并以蒸汽机为动力,对机床进行驱动或通过多轴对机床进行集群驱动,才形成了现代机床的雏形。
19世纪至20世纪初,随着电动机的问世,电动机取代了蒸汽机,经过了多轴对机床进行集群驱动、单独电动机驱动的封闭齿轮箱的发展过程,才使机床具备了现代的结构形式。
上世纪40年代,随着高速钢的和硬质合金工具的使用以及液压技术的应用,使机床在传动、机构、控制等方面得到很大的改进,加工精度和生产率得到显著提高。
自上世纪50年代以来,计算机技术开始应用于机床中,先后出现了数控机床、加工中心柔性制造系统等。
万能外圆磨床液压传动系统设计(有全套图纸)

万能外圆磨床液压传动系统设计摘要:随着科技步伐的加快,液压技术在各个领域中得到了广泛应用,液压系统已成为主机设备中最关键的部分之一。
本文主要研究的是液压传动系统,液压传动系统的设计需要与主机的总体设计同时进行。
设计时,必须从实际情况出发,有机地结合各种传动形式,充分发挥液压传动的优点,力求设计出结构简单、工作可靠、成本低、效率高、操作简单、维修方便的液压传动系统。
关键词:液压传动、数据计算、装量目录第一章引言 (1)第二章万能外圆磨床液压系统的设计步骤与设计要求 (2)2.1设计步骤 (2)2.2明确设计要求 (2)第三章万能外圆磨床液压系统工作原理及特点 (2)3.1万能外圆磨床液压系统工作原理 (3)3.2万能外圆磨床液压系统的特点 (6)第四章制定基本方案和绘制液压系统图 (7)4.1基本方案 (7)4.2液压系统图 (9)第五章型万能外圆磨床各液压元件的选择 (11)5.1液压泵的选择 (11)5.2阀的选择 (12)5.3器的选择 (13)5.4尺寸的确定 (13)5.5量的确定 (14)第六章磨床中上料机的液压系统进行设计计算 (16)6.1分析 (16)6.2缸主要参数的确定 (16)6.3液压系统图 (17)6.4元件的选择 (18)6.5系统的性能验算 (20)第七章型外圆磨床的故障分析及维修 (22)7.1型外圆磨床的故障分析 (22)7.2型外圆磨床的维修 (25)第八章总结 (28)第九章毕业设计小结 (29)第十章致谢 (30)参考文献 (31)第一章引言液压技术自18世纪末英国制成世界上第一台水压机算起,已有300年的历史了,但其真正的发展只是在第二次世界大战后50余年的时间内,战后液压技术迅速向民用工业,在机床,工程机械,农业机械,汽车等行业中逐步推广。
本世纪60年代以来,随着原子能,空间技术,计算机技术的发展,液压技术得到了很大的发展,并渗透到各个工业领域中去。
当前液压技术正向高压,高速,大功率,高效,低噪音,经久耐用,高度集成化的方向发展。
m1432A外圆磨床控制系统设计
课程设计报告书题目:M1432A型万能外圆磨床控制系统设计专业:电气工程及其自动化(拖动方向)班级:电气工程0901指导教师:俞鹤学生:杜敬峰学号:2009011671学生:秦洋学号:2009011682目录1…………………………………………………M1432A型万能外圆磨床基本特性1.1…………………………………………………………………M1432A简介1.2…………………………………………………M1432A外圆磨床基本外形1.3…………………………………………………M1432A四种常见加工形式2………………………………M1432A型万能外圆磨床接触器—继电器控制电路2.1…………………………………………接触器——继电器控制电气原理图2.2……………………………………………………………………元件明细表2.3……………………………………………接触器——继电器控制电路概述2.4……………………………………………接触器——继电器控制电路分析3………………………………………………M1432A型万能外圆磨床的PLC控制3.1………………………………………………………………PLC选型和简介3.2…………………………………………………………PLC输入输出点分配3.3………………………………………………………………………PLC程序3.4……………………………………………………………………PLC接线图4……………………………………………………………………………………小结5………………………………………………………………………………参考文献一、M1432A型万能外圆磨床基本特性1.1 M1432A简介M1432A型万能外圆磨床主要以磨削圆柱形或圆锥形(包括阶梯形)的外圆表面和内孔,成品的尺寸精度可达1~2级,表面光洁度可达T8~T10。
机床的外磨砂轮、内磨砂轮、工件、油泵及冷却,均以单独的电机驱动。
机床的工作台纵向运动,可由液压驱动,也可用手轮摇动。
活塞环斜端面全自动磨床上料装置的设计
1 概述1.1课题国内外现状在激烈的市场竞争中,企业的分化、改组;全球金融危机的蔓延。
部分活塞环行业机制转换快、决策正确,迅速摆脱困境、走出低谷,在激烈的市场竞争中占有一席之地,如仪征双环、安庆帝伯格茨、福建东亚、南京飞燕、长沙正圆、石家庄金刚集团和福州奥托帕斯等活塞环企业在国内市场上占有较大的市场份额,具有很强的市场竞争力。
也有的企业经营机制转换慢、决策水平低、在资不抵债的沉重包袱中破产,如广东、湖北、江苏、四川、云南等地的一些活塞环企业;还有的企业难以摆脱困境而等待被兼并或破产。
首先产品离不开设备,我国活塞环产品加工设备的自主设计能力较弱,多为国外产品的改版或引进国外设备,这样以来使得投入成本大大增加。
安庆帝伯格茨活塞环有限公司销售部部长周曙光认为,国内活塞环企业在技术研发方面仍与国外仍存在一定差距,表现在四个方面:一是在材料和表面处理方面,国内企业基本上没有创新能力;二是在产品台架验证方面,国内企业刚刚起步;三是国内企业缺乏产品设计经验,近几年才开始积累各种数据;四是国内工艺水平受设备影响较大,复杂产品很难保证生产能力。
就以上几点我们只分析关于设备的问题,目前国内市场上的活塞环斜端面磨床产品老旧,部分企业考虑到成本问题便没有更新设备。
虽然近年来我国的活塞环产品质量明显见好,价格大为降低。
但是国外产品的总体水平和质量终究还是比国内的要好,但价格却较贵。
他们的斜端面磨床比我国磨床先进很多,而且多为数控机床,它们采用全自动上、下料装置。
生产率极高,当然它的价格也较贵。
由此看来,看似一个简单的活塞环,当比较成本投入和产品的生产效率时它就变得复杂起来。
就其机械加工方面,国产活塞环无论在活塞环的表面粗糙度、尺寸公差、最薄厚度及环径最小直径尺寸以及自动化程度均与国外先进的活塞环磨床(如V-5C)差距较大。
例如德国格茨公司(GOETZE)、日本理研公司(RIKEN)、日本活塞环公司(NPR),日本帝国活塞环公司(TP)、美国密封动力公司、美国正圆公司和韩国柳成活塞环公司等十大公司。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动外圆磨床自动上料系统设计
摘
自动送料机构是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。自动送料机构的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流 电机、变频器、传感器、等电子器件组成。该装置涵盖了可编程控制技术,位置 控制技术、检测技术等,是机电一体,分别驱动横轴、竖轴变频器,控制自动送料机构横轴和竖轴的 精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC 主机,通过交流电机的正反转来控制自动送料机构手爪的张合,从而实现自动送料机构精确运 动的功能。本课题拟开发的物料搬运自动送料机构可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的 要求随时更改相关参数。
工业机器人是在计算机控制下可编程的自动机器人是提高产品质量与劳动生产率,实现生产过程自动化,改善劳动条件,减轻劳动强度的一种有效手段。机器人的诞生和发展虽只有30多年的历史,但它已应用到国民经济,民事技术等众多的领域,具有广阔的应用和发展前景,显示出强大的生命力[2]。
根据所处的环境和作业需求,工业机器人具有至少一项或多项拟人功能,如抓取功能或移动功能,或两者兼有之,另外还可能程度不等的具有某些环境感知功能(如视觉,力觉,触觉等)。以及语音功能及至逻辑思维,判断决策功能等。从而使其能在要求的环境中代替人进行作业。
(1)综合运用所学的基础理论、基本知识和基本技能,提高分析解决实际问题的能力。
(2)接受工程师必须的综合训练,提高实际工作能力。如调查研究、查阅文献和收集资料并进行分析的能力;制订设计或试验方案的能力;设计、计算和绘图能力;总结提高撰写论文的能力。
(3)检验综合素质与实践能力。
1.2
1.2.1
目前,工业机器人的定义,世界各国尚未统一,分类也不尽相同。最近联合国国际标准化组织采纳了美国机器人协会给工业机器人下的定义:工业机器人是一种可重复编程的多功能操作装置,可以通过改变动作程序,来完成各种工作,主要用于搬运材料,传递工件。参考国外的定义,结合我国的习惯用语,对工业机器人作如下定义:
关键词:自动送料机构, 交流电机,PLC,流程,参数
Abstract
Manipulator industrial robot systems traditional mandate, Robot is one of the key components. Manipulator using the mechanical structure of screw-ball, slider, and other mechanical devices composition; Electric have AC motor, inverter, sensor, and other electronic device components. The device covers a programmable control technology, position control technology, detection technology, Mechatronics is a typical representative of one of the machines. This paper presents a manipulator by three PLC output pulse, driving horizontal, the vertical axis transducer, control manipulator axis horizontal and vertical positioning precision,micro-switches position signal transmission will host PLC; location close to the switching signal from the feedback from the mainframe to the PLC, through the exchange of Motor reversion to control the manipulator gripper Zhang, thus achieving accurate manipulator movement functions. The topics to be developed by the Manipulator grasping be up in space objects, movements flexible, diverse, can replace the artificial heat and dangerous operation conducted operations, According to the workpiece can change the campaign process and the requirements of any changes to the relevant parameters.
Key Words:Manipulator,ACmotor,PLC,signal,relevant parameters
第
1.1
毕业设计是机械设计制造及其自动化专业在校学习的最后一个环节,是对四年大学学习的继续深化和检验,即有实践性又有综合性,是其他单一课程所不能替代的,通过毕业设计更能提高综合训练能力,为即将走向工作岗位,提高实际工作能力起到十分重要的作用。以达到如下目的:
工业机器人是一种机体独立,动作自由度较多,程序可灵活变更,能任意定位,自动化程度高的自动操作机械。主要用于加工自动线和柔性制造系统中传递和装卸工件或夹具[1]。
工业机器人以刚性高的手臂为主体,与人相比,可以有更快的运动速度,可以搬运更重的东西,而且定位精度相当高,它可以根据外部来的信号,自动进行各种操作。