刀库换刀流程和逻辑思路
刀库换刀流程和逻辑思路
刀库换刀流程和逻辑思路LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】刀库换刀流程和逻辑思路·乱刀式刀库的换刀流程图1.斗笠式①取刀②还刀③换刀KM2主KA1与KA2分PMC库PMC接线图。
在此例应用中,传感器信号分别接在、输入端口,而控制正反转接触器KM1、KM2的中间继电器的线圈分别由、控制。
电动刀库PMC接线图图6 刀库旋转逻辑梯形图例如,加工中心在执行M06T1换刀指刀令时的换刀结果是:刀库中的T1刀装放轴。
(1)D SCH功能指令(检索功能)当CNC读到T1指令代码信号时,将此信号信息送入PMC。
当PMC接到寻找新刀具的指令T1后(FT3为“1”)在模拟刀库的刀号数据表中开始T 代码数据检索出来存入F26地址单元中。
然后将1号刀所在数据表中的序号1存入到检索结果输出地址D100中,同时为“1”。
由于为“0”。
即断开,所以DSCH功能指令按规定2位BCD码处理数据。
(2)C OIN功能指令(比较指令)当为“1”时,地址D100的内容(指令1号)和地址D200(当前刀套数据表序号4)的内容作比较。
数据一致时,输出为“1”,不一致时,为“0”作为刀库旋转达ROT功能指令的条件。
(3)R OT功能指令(旋转指令)ROT功能指令中,旋转检索数(刀套位置个数)为12,现在位置地址为D200(存放当前刀套号4),目标位置地址为D100(存放T1号刀具的刀套号1),计算结果输出地址为C1。
当刀具判别指令为“0”,ROT指令开始执行根据ROT控制条件设定,计算出刀库现在的位置与目标相差的步数为“3”步将此数据存入C1中,并选择出最短旋转路径,使置“0”,正向旋转方向输出。
通过正向旋转继电器,驱动刀库正向旋转“3”步,即找到了1号刀位。
(4)CTR功能指令(计数指令)CTR功能指令中,计数指令01号计数,地址C1为刀库现在的位置目标位置相差的步数的数据存储地址。
数控车床换刀的原理

数控车床换刀的原理数控车床换刀的原理是通过自动化系统控制刀库中的刀具,根据加工需要,将合适的刀具自动装卸到主轴上进行加工。
换刀的过程一般包括以下几个步骤:1. 刀具信息的输入:将刀具的参数信息输入到数控机床的控制系统中。
这些信息包括刀具的几何参数、刀具材料、刀具号码等。
2. 刀具库的管理:刀具库是存放刀具的地方。
数控车床上一般会配备一个刀具库,里面可以放置多个不同的刀具。
在数控机床的控制系统中,可以设置每个刀具的位置和状态,以便在需要时能够准确地找到并进行换刀操作。
3. 刀具的选取:根据加工要求,在刀具库中选择合适的刀具。
根据控制系统的指令,通过自动取刀器从刀具库中取出刀具。
自动取刀器一般由机械手臂构成,可以在机床内进行多个方向的自由移动。
4. 刀具的装卸:当刀具被选中后,机械手臂将刀具转移到刀具位。
然后,刀具位上的机械装置将刀具插入主轴上的刀柄中,并将其固定。
这一过程需要保证刀具的准确定位和固定,以确保刀具在加工过程中的稳定性和精度。
5. 刀具的调整和检测:在刀具装卸完成后,需要进行刀具的调整和检测。
调整刀具的主要目的是保证刀具的几何参数与加工要求的一致性,而检测刀具的目的是确认刀具的装卸是否正确。
在数控机床上,通常会设置相关的检测装置,用于检测刀具的位置、刀具的磨损情况等。
6. 刀具的存储和管理:在刀具装卸完成后,未使用的刀具一般会放回刀具库中进行存储。
同时,数控机床的控制系统会对刀具的信息进行管理,包括刀具的使用寿命、刀具的磨损情况、刀具的库存情况等。
总体来说,数控车床换刀的原理是通过自动化系统控制刀库中的刀具,实现刀具的自动装卸。
这样可以提高生产效率,减少人工操作的错误和劳动强度,进而提高加工精度和产品质量。
刀库的动作顺序说明
自制刀库动作顺序:(定点换刀)一.选刀动作(TXX)选刀动作分为两个步骤:第一步骤: 选择新刀具到刀库换刀位置.初始状态1:机械手臂在原始位置----直接选新刀具到换刀位置.初始状态2:机械手臂在等待位置----先将等待位置的刀具号所在的刀套转到换刀位置.把机械手上的刀具送回到刀库中.然后再选新刀具所在的刀套到换刀位置.刀链转的动作:1.刀套定位缩回2.刀链正转或刀链反转3.到目标位的前一个刀套, 刀链慢速4.到目标位后刀套定位伸出5.伸出到位后,刀链正转或反转,慢速断电.等待位的刀具送回刀库的动作:条件1.刀套定位伸出2.刀链计数开关在位3.刀套检测开关为04.刀链正转或反转及慢速断电动作顺序1.机械手臂拔刀2. 机械手臂转向刀库3.机械手臂插刀4. 机械手臂右移第二步骤: 将换刀位置的新刀具取到等待位.条件1.刀套定位伸出2.刀套在位,3.刀套检测开关为0,4.刀链正转或反转及慢速继电器断电。
动作顺序1.机械手臂左移刀库2.机械手臂拔刀3.机械手臂转向等待位4.机械手臂插刀二.换刀动作(M06)换刀动作分为两个步骤:第一步骤: 把机械手上的刀具换到主轴上初始状态:在等待位1.刀库门开2.坐标回换刀位置(和1步同时进行)3.主轴定向4. 机械手臂转向主轴5.机械手臂右移6.主轴松刀7.机械手臂拔刀8..机械手臂180度或0度旋转9..机械手臂插刀10.主轴夹刀11机械手臂左移12机械手臂转向等待位13刀库门关(关门后即可以进行加工)第二步骤: 将等待位的刀具送回刀库1.机械手臂拔刀2.机械手臂左移3.机械手臂插刀4.机械手臂右移(整个换刀动作结束)注意:如果选择的刀具在主轴上,则继续执行下面的程序。
交换站动作顺序M60(任意交换) M601(指定1号台) M602(指定2号台) 动作顺序:1.B轴回零.2.X轴回到换台位置.3.换台门开4.1号台(或2号台)快出5.台板松开(浮起)6.1号台(或2号台)慢回7.180度或0度旋转8.2号台(或1号台)慢出9.台板夹紧10.2号台(或1号台)快回11.换台门关。
加工中心的换刀原理

加工中心的换刀原理加工中心的换刀原理是指在加工过程中,当需要换一把不同工具进行加工时,加工中心能够自动地将当前的刀具卸下,然后安装新的刀具,以保证加工的连续性和高效性。
加工中心通常配备了一个刀库,用于存放不同类型的刀具。
刀库内的刀具根据其特性和用途被分配了一个特定的刀位。
刀具库通常由数控系统控制,可以根据加工需求自动选择和安装相应的刀具。
加工中心的换刀流程通常包括以下几个步骤:1. 刀具识别:加工中心需要首先识别当前所使用的刀具类型和位置。
通过刀具的标识或者其他识别方式,数控系统能够准确地确定当前所使用的刀具。
2. 刀具卸下:在识别了当前刀具后,加工中心会将当前的刀具卸下。
这个过程通常是由一个自动换刀系统完成的,它可以根据机床的结构和控制系统的指令,自动操作各个动作。
例如,可以通过夹紧装置松开卡住刀具的螺栓,然后通过主轴的卸下动作将刀具从主轴中取出。
3. 刀具安装:在刀具卸下后,加工中心需要安装新的刀具。
这个过程也是由自动换刀系统完成的。
它可以将新的刀具从刀库中选取出来,然后通过夹紧装置将刀具安装到主轴上。
4. 刀具测量和校准:在刀具安装完成后,加工中心通常需要对新安装的刀具进行测量和校准。
这是为了确保刀具安装的准确性和稳定性。
测量和校准可以通过一些传感器和测量设备进行,如刀具长度测量设备,加工中心控制系统会根据这些测量结果进行补偿和调整。
5. 刀具补偿调整:当刀具安装完成并完成了测量和校准后,加工中心通常还需要进行刀具补偿调整。
这是因为不同类型的刀具,在加工过程中可能存在一些误差和偏差。
加工中心会通过数控系统对刀具的补偿参数进行调整,以保证加工结果的准确性和质量。
总的来说,加工中心的换刀原理是通过一个自动换刀系统,根据刀具的类型和位置,将当前的刀具卸下并安装新的刀具。
换刀过程通常还包括了刀具的测量和校准,以及刀具补偿调整。
这样可以确保加工中心在加工过程中能够高效、准确地使用不同类型的刀具,提高加工效率和加工质量。
加工中心刀库装刀步骤【技巧】
数控加工中心有一刀库,我们如果需要哪把刀就用这个指令把它调出来。
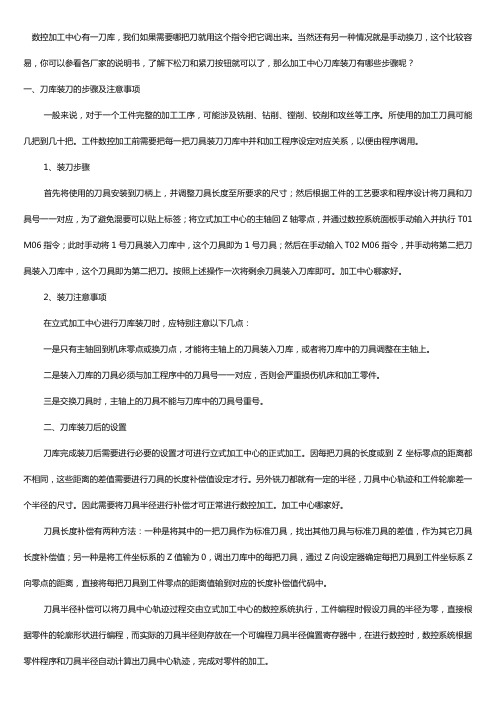
当然还有另一种情况就是手动换刀,这个比较容易,你可以参看各厂家的说明书,了解下松刀和紧刀按钮就可以了,那么加工中心刀库装刀有哪些步骤呢?一、刀库装刀的步骤及注意事项一般来说,对于一个工件完整的加工工序,可能涉及铣削、钻削、镗削、铰削和攻丝等工序。
所使用的加工刀具可能几把到几十把。
工件数控加工前需要把每一把刀具装刀刀库中并和加工程序设定对应关系,以便由程序调用。
1、装刀步骤首先将使用的刀具安装到刀柄上,并调整刀具长度至所要求的尺寸;然后根据工件的工艺要求和程序设计将刀具和刀具号一一对应,为了避免混要可以贴上标签;将立式加工中心的主轴回Z轴零点,并通过数控系统面板手动输入并执行T01 M06指令;此时手动将1号刀具装入刀库中,这个刀具即为1号刀具;然后在手动输入T02 M06指令,并手动将第二把刀具装入刀库中,这个刀具即为第二把刀。
按照上述操作一次将剩余刀具装入刀库即可。
加工中心哪家好。
2、装刀注意事项在立式加工中心进行刀库装刀时,应特别注意以下几点:一是只有主轴回到机床零点或换刀点,才能将主轴上的刀具装入刀库,或者将刀库中的刀具调整在主轴上。
二是装入刀库的刀具必须与加工程序中的刀具号一一对应,否则会严重损伤机床和加工零件。
三是交换刀具时,主轴上的刀具不能与刀库中的刀具号重号。
二、刀库装刀后的设置刀库完成装刀后需要进行必要的设置才可进行立式加工中心的正式加工。
因每把刀具的长度或到Z坐标零点的距离都不相同,这些距离的差值需要进行刀具的长度补偿值设定才行。
另外铣刀都就有一定的半径,刀具中心轨迹和工件轮廓差一个半径的尺寸。
因此需要将刀具半径进行补偿才可正常进行数控加工。
加工中心哪家好。
刀具长度补偿有两种方法:一种是将其中的一把刀具作为标准刀具,找出其他刀具与标准刀具的差值,作为其它刀具长度补偿值;另一种是将工件坐标系的Z值输为0,调出刀库中的每把刀具,通过Z向设定器确定每把刀具到工件坐标系Z 向零点的距离,直接将每把刀具到工件零点的距离值输到对应的长度补偿值代码中。
刀库换刀流程和逻辑思路

刀库换刀流程和逻辑思路·乱刀式刀库的换刀流程图固定式刀库的换刀流程图固定式刀库换刀过程分解:固定式刀库换刀动作可分为三个,即取刀、还刀和换刀。
由于采用固定刀位管理方式,刀具的交换实际上是还刀和取刀这两个动作。
(斗笠式刀库控制约定:1.斗笠式刀库采用固定刀位,即刀套号就是刀具号;2.取刀时,刀库就近找刀)① 取刀现状:主轴上无刀具 编程:M06 T* 刀库动作描述:主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置主轴准停Z=-10.主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10. 主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停② 还刀现状:主轴上有刀具 编程:M06 T0 刀库动作描述:主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停主轴换刀位置主轴换刀准备位置 刀库原始位置 刀库换刀位置Z=-10.主轴准停③ 换刀现状:主轴上有刀具 编程:M06 T*刀库动作描述: 刀具交换的过程,就是还刀加上取刀的过程。
固定式刀库自动换刀装置电气控制电气控制电路包括接强电电路和PMC控制电路两部分。
下图所示为接触器控制电路。
主电路由空气开关QF、KM1主触点、KM2主触点、三相异步交流电机M等组成。
控制电路中中间继电器KA1与KA2分别控制接触器KM1和KM2的线圈,控制刀库电机M 的正反转和停机制动。
实现刀具的选择从而达到精确选刀的目的。
电动刀库电气控制线路图四、固定式刀库自动换刀装置的PMC控制PMC控制包括硬件控制和软件控制两方面。
代系统斗笠式刀库换刀规划

目的和意义
随着制造业的快速发展,高效、高精度的数控机床在加工领域的应用越来越广泛。
斗笠式刀库作为数控机床的关键组成部分,其换刀规划的合理性和高效性对整个加 工过程的效率和质量具有重要影响。
本研究旨在针对斗笠式刀库的换刀过程进行优化规划,以提高加工效率、降低刀具 磨损和减少空程时间,为实际生产提供理论支持和实践指导。
05
实际应用与效果评估
应用案例介绍
案例一
某机械加工企业,采用斗笠式刀库进 行自动化换刀。通过合理的换刀规划 ,实现了加工效率的提高和成本的降 低。
案例二
某汽车制造企业,在生产线上采用斗 笠式刀库进行换刀。通过优化换刀策 略,减少了非加工时间,提高了生产 线的整体效率。
效果评估方法
对比分析法
将实施斗笠式刀库换刀规划前后的加工效率、换刀时间、成本等 数据进行对比,分析其变化情况。
统计分析法
对大量的数据进行统计分析,了解斗笠式刀库换刀规划在实际应用 中的表现和趋势。
专家评估法
邀请行业专家对斗笠式刀库换刀规划的实际效果进行评估,给出专 业意见和建议。
效果评估结果
加工效率提高
通过合理的换刀规划,减少了换刀时 间,提高了加工效率。
成本降低
优化了换刀策略,减少了不必要的浪 费,降低了生产成本。
代系统斗笠式刀库换刀规划
目录
• 引言 • 斗笠式刀库换刀系统概述 • 换刀规划算法 • 换刀规划系统实现 • 实际应用与效果评估 • 结论与展望
01
引言
主题简介
01
斗笠式刀库是数控机床中常用的 一种刀库形式,具有存刀量大、 换刀速度快等优点。
02
换刀规划是数控加工中的重要环 节,合理的换刀规划可以提高加 工效率、减少空程时间和刀具磨 损。
13. FANUC圆盘刀库——PMC换刀详解.

加工中心机床圆盘式刀库发那科系统PMC的编程技术安庆长谷川数控机床有限公司 雷晓鹏北京发那科机电有限公司 胡 年自动换刀机构(ATC)是数控机床易发生故障的地方。
本文介绍PMC的编程思路和方法,供大家讨论。
此程序自2004年始已在数百台加工中心运用。
一、基本规则1、刀具在D0000到D0032登录。
D0000登录主轴刀具号,D0001到D0032登录刀套内刀具号,在此假定刀库容量为32把刀。
2、执行T码时,刀库中T码刀具旋转到换刀口位置,在刀库旋转过程中,程序自动加工运行不中断,称之为预选刀。
3、M6执行换刀过程,执行前,Z轴必须回第一参考点,即 G91 G28 Z0或 M19 G91 G28 Z0。
4、允许的大径刀(如面铣刀)直径不容许超过普通刀具(以下简称:小径刀)最大直径的二倍,否则大径刀之间随机交换会撞刀。
刀具重量不能超过刀库容许重量。
大径刀刀具号设定规则:大径刀的相临两侧刀套内必须为空,空刀套的刀具号自动设定为99(也可设定其他数字,PMC识别为空刀)。
D100内设定大径刀个数,小径刀刀具号必须大于大径刀个数乘2加1。
初始设定主轴刀具号D0000必须是小径刀刀具号。
5、大径刀具交换规则:小径刀可放进大径刀刀套内,大径刀不可放进小径刀刀套内。
主轴小径刀与刀库小径刀交换,一次性换刀;主轴大径刀与刀库大径刀交换,一次性换刀;主轴小径刀与刀库大径刀交换,一次性换刀,小径刀放进大径刀刀杯套内;主轴大径刀与刀库小径刀交换, 第一次将原大径刀刀套内的小径刀换到主轴上,第二次再进行小径刀之间的交换。
以上交换规则PMC自动识别换刀。
6、在刀库运行中发生停电等故障,具备中断点记忆和用按键操作恢复功能。
有完善的电机保护和报警操作提示。
7、以上自动刀具交换(ATC)动作本文介绍的都用PMC完成,读者也可用宏程序和PMC结合编程实现。
二、PMC程序框图三、详细介绍刀库盘旋转部分PMC程序和说明1、准备工作自动换刀部分反馈信号:R30.0=1 主轴抓刀反馈;R30.1=1 主轴松刀反馈,延迟0.2秒是消除信号反馈传感器安装误差,其它信号反馈延迟道理相同;R30.2=1 刀杯上(水平位置)信号反馈;R30.3=1 刀杯下(刀具垂直向下位置)信号反馈。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刀库换刀流程和逻辑思路
·
乱刀式刀库的换刀流程图
固定式刀库的换刀流程图
固定式刀库换刀过程分解:
固定式刀库换刀动作可分为三个,即取刀、还刀和换刀。
由于采用固定刀位管理方式,刀具的交换实际上是还刀和取刀这两个动作。
(斗笠式刀库控制约定:1.斗笠式刀库采用固定刀位,即刀套号就是刀具号;2.取刀时,刀库就近找刀)
①取刀
现状:主轴上无刀具
编程:M06 T*
刀库动作描述:
②还刀
现状:主轴上有刀具
编程:M06 T0
刀库动作描述:
③换刀
现状:主轴上有刀具
编程:M06 T*
刀库动作描述:刀具交换的过程,就是还刀加上取刀的过程。
固定式刀库自动换刀装置电气控制
电气控制电路包括接强电电路和PMC控制电路两部分。
下图所示为接触器控制电路。
主电路由空气开关QF、KM1主触点、KM2主触点、三相异步交流电机M等组成。
控制电路中中间继电器KA1与KA2分别控制接触器KM1和KM2的线圈,控制刀库电机M的正反转和停机制动。
实现刀具的选择从而达到精确选刀的目的。
电动刀库电气控制线路图
四、固定式刀库自动换刀装置的PMC控制
PMC控制包括硬件控制和软件控制两方面。
硬件控制包括输入信号的接入和输出信号的控制。
下图所示为电动刀库PMC接线图。
在此例应用中,传感器信号分别接在X2.0、X2.1输入端口,而控制正反转接触器KM1、KM2的中间继电器的线圈分别由Y50.1、Y50.2控制。
电动刀库PMC接线图
图6 刀库旋转逻辑梯形图
例如,加工中心在执行M06T1换刀指刀令时的换刀结果是:刀库中的T1刀装放轴。
(1)D SCH功能指令(检索功能)
当CNC读到T1指令代码信号时,将此信号信息送入PMC。
当PMC接到寻找新刀具的指令T1后(FT3为“1”)在模拟刀库的刀号数据表中开始T代码数据检索出来存入F26地址单元中。
然后将1号刀所在数据表中的序号1存入到检索结果输出地址D100中,同时R10.2为“1”。
由于R9091.0为“0”。
即断开,所以DSCH功能指令按规定2位BCD码处理数据。
(2)C OIN功能指令(比较指令)
当R10.2为“1”时,地址D100的内容(指令1号)和地址D200(当前刀套数据表序号4)的内容作比较。
数据一致时,输出R10.3为“1”,不一致时,R10.3为“0”作为刀库旋转达ROT功能指令的条件。
(3)R OT功能指令(旋转指令)
ROT功能指令中,旋转检索数(刀套位置个数)为12,现在位置地址为D200(存放当前刀套号4),目标位置地址为D100(存放T1号刀具的刀套号1),计算结果输出地址为C1。
当刀具判别指令R10.3为“0”,ROT指令开始执行根据ROT控制条件设定,计算出刀库现在的位置与目标相差的步数为“3”步将此数据存入C1中,并选择出最短旋转路径,使R10.4置“0”,正向旋转方向输出。
通过Y50.1正向旋转继电器,驱动刀库正向旋转“3”步,即找到了1号刀位。
(4)CTR功能指令(计数指令)
CTR功能指令中,计数指令01号计数,地址C1为刀库现在的位置目标位置相差的步数的数据存储地址。
R10.4控制计数器的加计数或计数器的减计数,X2.1为0时计数器不计数,当X2.1为1时计数器计数累加。
当计数器累加到定值R10.5输出。
刀库旋转后,R10.3输出为“1”时(刀库的实际位置与刀库目标位置一致),即识虽了所要寻找的新刀具,刀库停转并定位,等待换刀。