单片机原理第4章1
完整word版第4章单片机原理课后答案
习题1. C51特有的数据类型有哪些?答:C51特有的数据类型有位型bit、特殊位型sbit、8位特殊功能寄存器型sfr和16位特殊功能。
sfr16寄存器型2. C51中的存储器类型有几种,它们分别表示的存储器区域是什么?答:C51中的存储器类型有6种,分别表示的存储器区域是:data:直接寻址的片内RAM低128B,访问速度快bdata:片内RAM的可位寻址区(20H~2FH),允许字节和位混合访问idata:间接寻址访问的片内RAM,允许访问全部片内RAMpdata:用Ri间接访问的片外RAM低256Bxdata:用DPTR间接访问的片外RAM,允许访问全部64KB片外RAMcode:程序存储器ROM 64KB空间3. 在C51中,bit位与sbit位有什么区别?答:bit位类型符用于定义一般的位变量,定义的位变量位于片内数据存储器的位寻址区。
定义时不能指定地址,只能由编译器自动分配。
sbit位类型符用于定义位地址确定的位变量,定义的位变量可以在片内数据存储器位寻址区,也可为特殊功能寄存器中的可位寻址位。
定义时必须指明其位地址,可以是位直接地址,也可以是可位寻址的变量带位号,还可以是可位寻址的特殊功能寄存器变量带位号。
4. 在C51中,通过绝对地址来访问的存储器有几种?答:绝对地址访问形式有三种:宏定义、指针和关键字“_at_”。
5. 在C51中,中断函数与一般函数有什么不同?答:中断函数是C51的一个重要特点,C51允许用户创建中断函数。
中断函数用interruptm修饰符,m的取值为0~31,对应的中断情况如下:0——外部中断01——定时/计数器T02——外部中断13——定时/计数器T14——串行口中断5——定时/计数器T2中断函数需要注意如下几点。
(1) 中断函数不能进行参数传递(2) 中断函数没有返回值(3) 在任何情况下都不能直接调用中断函数(4) 如果在中断函数中调用了其他函数,则被调用函数所使用的寄存器必须与中断函数相同(5) C51编译器对中断函数编译时会自动在程序开始和结束处加上相应的内容(6) C51编译器从绝对地址8m+3处产生一个中断向量(7) 中断函数最好写在文件的尾部,并且禁止使用extern存储类型说明6. 按给定的存储类型和数据类型,写出下列变量的说明形式。
单片机原理及应用第四章课后题答案
第四章作业答案16.MCS-51单片机系统中,片外程序存储器和片外数据存储器共用16位地址线和8位数据线,为何不会产生冲突?解:数据存储器的读和写由RD和WR信号控制,而程序存储器由读选通信号PSEN控制,这些信号在逻辑上时序上不会产生冲突;程序存储器访问指令为MOVC,数据存储器访问指令为MOVX。
程序存储器和数据存储器虽然共用16位地址线和8位数据线,但由于二者访问指令不同,控制信号不同,所以两者虽然共处于同一地址空间,不会发生总线冲突。
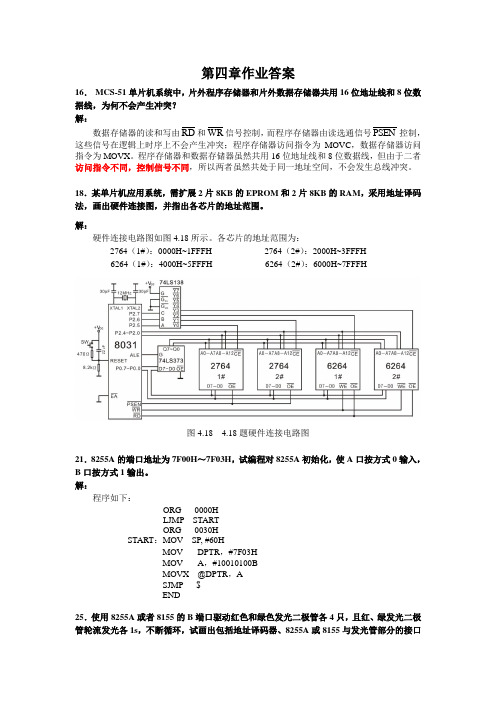
18.某单片机应用系统,需扩展2片8KB的EPROM和2片8KB的RAM,采用地址译码法,画出硬件连接图,并指出各芯片的地址范围。
解:硬件连接电路图如图4.18所示。
各芯片的地址范围为:2764(1#):0000H~1FFFH 2764(2#):2000H~3FFFH6264(1#):4000H~5FFFH 6264(2#):6000H~7FFFH图4.18 4.18题硬件连接电路图21.8255A的端口地址为7F00H~7F03H,试编程对8255A初始化,使A口按方式0输入,B口按方式1输出。
解:程序如下:ORG 0000HLJMP STARTORG 0030HSTART:MOV SP, #60HMOV DPTR,#7F03HMOV A,#10010100BMOVX @DPTR,ASJMP $END25.使用8255A或者8155的B端口驱动红色和绿色发光二极管各4只,且红、绿发光二极管轮流发光各1s,不断循环,试画出包括地址译码器、8255A或8155与发光管部分的接口电路图,并编写控制程序。
解:使用8255A,电路连接图如图4.25所示。
图4.25 4.25题硬件连接电路图其中,PB0~PB3接红色发光二极管,PB4~PB7接绿色发光二极管。
设MCS-51单片机主频为12MHz。
程序如下:ORG 0000HLJMP STARTORG 0030HSTART:MOV SP, #60HMOV DPTR, #7FFFH ; 数据指针指向8255A控制口MOV A, #80HMOVX @DPTR, A ; 工作方式字送8255A控制口MOV DPTR, #7FFDH ; 数据指针指向8255A 的B口MOV A, #0FH ; 置红色发光二极管亮LP1:MOVX @DPTR, A ; 置红色发光二极管亮LCALL DELAY ; 调用1S延时子程序CPL A ; 置发光二极管亮反色SJMP LP1 ; 循环执行DELAY:MOV R7,#10 ; 1s延时子程序D1:MOV R6,#200D2:MOV R5,#248D3:NOPDJNZ R5,D3DJNZ R6,D2DJNZ R7,D1RETEND采用定时器T0方式1中断实现1s定时。
单片机原理及应用教程(C语言版)-第4章 单片机C语言及程序设计

4.3.2 C51变量的存储类型
三、外部存储
外部(存储)变量:用extern声明的变量为外 部变量,是在其它文件定义过的全局变量。 用 extern声明后,便可以在所声明的文件中使用。
需要注意的是:在定义变量时,即便是全局变 量,也不能使用extern修饰。
4.3.2 C51变量的存储类型
四、寄存器存储
动态(存储)变量:用auto定义的为动态变量, 也叫自动变量。
作用范围:在定义它的函数内或复合语句内部 当定义它的函数或复合语句执行时,C51才为 变量分配存储空间,结束时所占用的存储空间释放。 定义变量时,auto可以省略,或者说如果省略 了存储类型项,则认为是动态变量。动态变量一般 分配使用寄存器或堆栈。
“C51”概念:为了与ANSI C区别,把“单片 机C语言”称为“C51”,也称为“Keil C”。
4.1.1 C语言编程的优势
在编程方面,使用C51较汇编语言有诸多优势: 1)编程容易 2)容易实现复杂的数值计算 3)容易阅读与交流 4)容易调试与维护 5)容易实现模块化开发 6)程序可移植性好
本 无符号整型 unsigned int 2字节 0~65535 有符号整型 signed int 2字节 -32768~32767
类 无符号长整型 unsigned long 4字节 0~4294967295
型 有符号长整型 signed long 4字节 -2147483648~2147483647
MCS-51单片机有四个存储空间,分成三类, 它们是片内数据存储空间、片外数据存储空间和 程序存储空间。
MCS-51单片机有更多的存储区域:由于片内 数据存储器和片外数据存储器又分成不同的区域, 所以单片机的变量有更多的存储区域。
第4章单片机原理及应用(C51编程)

4.3 C51的函数
4.3.1
返回值类型 { 函数体 }
C51函数的定义
函数名(形式参数列表)[编译模式][reentrant][interrupt n][using n]
一般形式:
编译模式为SMALL、COPACT或LARGE reentrant用于定义可重入函数 interrupt n 用于定义中断函数,n为中断号,可以为0~31 using n 确定工作寄存器组,取值为0~3
从而使DBYTE用于以字节形式对data区访问,可以写成:
与此类似: CBYTE用于以字节形式对code区进行访问; PBYTE用于以字节形式对pdata区进行访问; XBYTE用于以字节形式对xdata区进行访问。
CWORD、DWORD、PWORD和XWORD用于以字形式对 code区、data区、pdata区和xdata区进行访问。
4.2.4
C51程序编写示例
C51源程序
C51编译器
浮动目标码模块 系统库 连接器
列表文件 用户库
绝对定位目标码文件
映像文件
软件模拟器
转换器
硬件仿真器
OMF51格式文件 写入程序存储器 编程器
【例4-1】将30H至3FH共16个RAM单元初始化为“55H”。 #include <reg52.h> #include <absacc.h> void main(void) { unsigned char i; for (i=0;i<=15;i++) { DBYTE[0x30+i]=0x55; } while(1); } 编译系统自动连接了 startup.a51生成代码 一是将内部RAM的 00H~7FH清0; 二是设置堆栈指针SP。 有全局变量赋值时 编译系统会自动连接 init.a51生成代码
单片机原理与接口技术第版李晓林

30.06.2020 单片机原理与接口技术(第3版).李晓林.电子工业出版社
返回目录
3
本章目录
4.4 C51结构化程序设计 4.4.1 顺序结构程序 4.4.2 选择结构程序 4.4.3 循环结构程序
4.5 C51程序设计实例 4.5.1 查表程序 4.5.2 单片机内/外部资源应用
程序设计 4.5.3 C51语言和MCS-51汇编
2) 程序由若干函数组成,具有良好的模块化结构、可移植 性好、便于项目维护管理;
3) 有丰富的子程序库可直接引用,从而大大减少用户编程 工作量,提高编程效率;
4) 与汇编语言交叉编程。用汇编语言编写与硬件有关的程 序,用C51编写与硬件无关的运算程序,充分发挥两种语言的长 处,提高开发效率。
30.06.2020 单片机原理与接口技术(第34.2.1 标识符和关键字
----关键字列表
30.06.2020 单片机原理与接口技术(第3版).李晓林.电子工业出版社
返回目录
13
4.2.2 数据类型
----C51的数据类型
C51具有ANSI C的所有标准数据类型。
其基本数据类型包括:char、int、short、 long、float和double。
关键字则是编程语言保留的特殊标识符,它们具有固定的 名称和含义,在程序编写中不允许将关键字另做他用。C51中的 关键字除了有ANSI C标准的32个关键字外,还根据MCS-51单 片机的特点扩展了相关的关键字。C51关键字如表5-1所示。
在C51的文本编辑器中编写C程序,系统可以把保留关键字 以不同颜色显示,如int关键字的默认颜色为天蓝色。
30.06.2020 单片机原理与接口技术(第3版).李晓林.电子工业出版社
单片机微型计算机原理及接口技术课后习题答案第4章
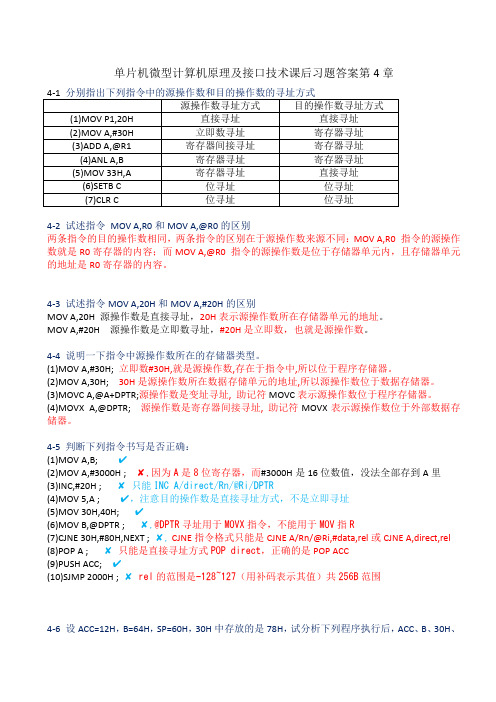
单片机微型计算机原理及接口技术课后习题答案第4章4-2 试述指令MOV A,R0和MOV A,@R0的区别两条指令的目的操作数相同,两条指令的区别在于源操作数来源不同:MOV A,R0 指令的源操作数就是R0寄存器的内容;而MOV A,@R0 指令的源操作数是位于存储器单元内,且存储器单元的地址是R0寄存器的内容。
4-3 试述指令MOV A,20H和MOV A,#20H的区别MOV A,20H 源操作数是直接寻址,20H表示源操作数所在存储器单元的地址。
MOV A,#20H 源操作数是立即数寻址,#20H是立即数,也就是源操作数。
4-4 说明一下指令中源操作数所在的存储器类型。
(1)MOV A,#30H; 立即数#30H,就是源操作数,存在于指令中,所以位于程序存储器。
(2)MOV A,30H; 30H是源操作数所在数据存储单元的地址,所以源操作数位于数据存储器。
(3)MOVC A,@A+DPTR;源操作数是变址寻址, 助记符MOVC表示源操作数位于程序存储器。
(4)MOVX A,@DPTR; 源操作数是寄存器间接寻址, 助记符MOVX表示源操作数位于外部数据存储器。
4-5 判断下列指令书写是否正确:(1)MOV A,B; ✔(2)MOV A,#3000H ; ✘,因为A是8位寄存器,而#3000H是16位数值,没法全部存到A里(3)INC,#20H ; ✘只能INC A/direct/Rn/@Ri/DPTR(4)MOV 5,A ; ✔,注意目的操作数是直接寻址方式,不是立即寻址(5)MOV 30H,40H; ✔(6)MOV B,@DPTR ; ✘,@DPTR寻址用于MOVX指令,不能用于MOV指R(7)CJNE 30H,#80H,NEXT ; ✘,CJNE指令格式只能是CJNE A/Rn/@Ri,#data,rel或CJNE A,direct,rel(8)POP A ; ✘只能是直接寻址方式POP direct,正确的是POP ACC(9)PUSH ACC; ✔(10)SJMP 2000H ; ✘rel的范围是-128~127(用补码表示其值)共256B范围4-6 设ACC=12H,B=64H,SP=60H,30H中存放的是78H,试分析下列程序执行后,ACC、B、30H、SP中的内容分别为多少,并画出堆栈示意图。
(单片机完整课件PPT)第四章
访问 SFR 的 数据类型
例:
bit a1; unsigned char a2; unsigned int a3; unsigned char *a4; unsigned int *a5; a1=0; //位a1为0 a2=0x20; //字节变量a2=20h a3=0x1234; //整型(字)变量a3=1234h a4=0x30; //a4指向内RAM30h单元 a5=0x2000; //a5指向外RAM2000h单元
注意:
Unsigned char code a[10]={0,1,4,9,16,25,36,49,64,81}; Main() {unsigned char x,y; x=3; y=a[x];
a[3]=5;
定义表格数据, 存放在ROM里
}
Unsigned char a[10]={0,1,4,9,16,25,36,49,64,81}; Main() {unsigned char x,y; x=3; y=a[x]; a[3]=5; }
单片机原理与应用技术
厦门理工学院电子与电气工程系 陈志英
第四章 单片机C语言程序设计
4.1 C51的一般格式 4.2 51单片机的C51定义 4.3 C51程序设计简单举例
4.1 C51的一般格式
C程序(.C) 汇编程序(.ASM) 指令代码(.BIN)
C编译器 汇编器
C编译器
C51
FRANKLIN C51 KEIL C51 格式基本相同,可以兼容
数 据 类 型 data/idata/pdata 指针型 code/xdata 通用指针 sbit SFR SFR16
长度/位 8 16 24 1 8 16
字节数 1 2 3 — 1 2
PIC18F452单片机原理及编程实践(第四章)PIC的端口编程

端口A:RA(7线) 端口B:RB(8线) 端口C:RC(8线) 端口D:RD(8线) 端口E:RE(3线)
注: ①只列出引脚的基本功能; ②28脚芯片只有RA、 RB 和RC端口。
4
4.1 PIC 单片机的I/O端口编程
与其它单片机(如:MCS-51)不同:每一个端口都对 应三个SFR。其中: Out Data Latch x:--------------端口输出数据锁存器; TRIS Latch x: -------端口数据传送方向控制寄存器;
2017/8/29
5
4.1.1 TRIS x 寄存器的作用
1. 2.
TRISx寄存器控制对应端口、 对应位 数据传送的方向; TRIS x寄存器的宽度(bit)与PORT x的宽度一致; TRIS x寄存器某一位=1,对应PORT x对应位为输入; TRIS x寄存器某一位=0,对应PORT x对应位为输出。
TTL 电平输 入缓冲器
CK /Q
Tris Latch
RD TRIS
Q
RD PORT
D
Data Input Latch
EN
返回上次
2017/8/29 8
PIC18端口的两类主要操作
数据的输出:来自内部的数据总线送至Data Latch的D端, 再经/Q端输出经门电路和场效应管送至I/O引脚。 数据的输入:来自I/O引脚的数据经TTL电平输入缓冲器送 到Input Latch的D端,由Q端经三态门送内部数据总线。
2017/8/29
2
4.0 PIC18单片机的I/O端口简介
以DIP40脚的PIC18F458/452为例。具有5个并行端口、 共占据34个芯片引脚: PORTA ------ 7bit PORTB ------ 8bit
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对精益求精者来说,使用哪条指令更好还是有推敲余地的。
• (6)对片内RAM的间址寄存器是R0和R1,而R2~R7不可以! 外部存储器间的数据交换,可通过R0和R1、DPTR和PC实现,
而且对它们的操作只有间接寻址一种方式。
单片机原理及程序设计 第4章
• R0和R1的间址范围为0~FFH,只有两种指令形式:
• ;(A)=ADH+9DH=4AH,P、OV、AC、CY均为1
A,#00H A,#4CH A,#01H ;(A)=4BH,P=0 ;(A)=FFH, AC、CY为1 ;(A)=00H, CY为1
单片机原理及程序设计 第4章
• 解:第1条指令执行后,(A)=ADH中,由于ADH 中共有5个 “1”,因此,奇偶标志位P为“1”,PSW中其它状态位不变。 • ADH = 173(无符号数)或-83(有符号数:补码); • 9DH = 157(无符号数)或-99(有符号数)。
单片机原理及程序设计 第4章
单片机原理及程序设计 第4章
• 4.3.3 MCS-51的寻址方式
• 所谓寻址方式,就是CPU寻找操作数的方式。51机有以下几种寻 址方式: • 1.立即寻址:操作数直接包含在指令中。符号“#”表示其后的 数据为立即数。如: • MOV • MOV A,#40H DPTR,#1000 ;将8位二进制数40H赋予A ;将1000赋予数据指针DPTR
单片机原理及程序设计 第4章
2.计算机“智慧”的来源 计算机(单片机)系统能完成一项具体的、复杂
的工作,说明它有思维的能力。它的“智慧”是从哪
来的呢?答案是人赋予它的。
单片机原理及程序设计 第4章
3.计算机的加工原料 • 计算机的加工原料是数据且只有数据。
单片机原理及程序设计 第4章
4.2 机器码-汇编语言-到高级语言 计算机的CPU只能识别的二进制代码。计算机发 明之初,程序是由编程者直接输入机器码使计算机工 作的。 机器码是计算机最底层的可执行的代码。由于难 于理解、编程工作量大,而效率极低,直接输入机器 码的方法只适于专业计算机软件人员,不利于计算机 的发展和普及。
•
•
执行加法运算后,符号位(b7),出错或但结果不正确时,
OV=1。 ④ 带进位加法指令(ADDC)中的累加器A除了加源操作 数外,还需要加上进位标志Cy。
单片机原理及程序设计 第4章
• 2)减法指令 • • • • • • 特点:结果在A中。寻址方式同加法影响标志位: Cy:为1,表示被减数小于减数,产生借位; OV:对带符号数OV为1,结果不正确。 Ac:如果b3位向b4位借位,则为1;反之为0。 P:累加器A中“1”的个数为奇数时,P为1。 只有带借位的减法指令,因此,用减法指令前,往往需通
单片机原理及程序设计 第4章
Powerpoint 制作:
五邑大学信息工程学院
刘焕成
电话:0750-3299035(O)
课程主讲:XXX
单片机原理及程序设计 第4章
第4章 单片机应用系统编程基础内容: 从源程序到可执行代码
机器码-汇编语言-高级语言
MCS-51汇编语言指令分析
汇编语言程序组成与结构
从C语言过渡到C51 程序设计举例
• ;执行后(A)=85H,(20H)=4EH,(R0)不变
• XCHD A,@R0 • ;执行后(A)=8EH,(20H)=45H,(R0)不变 • SWAP A • ;执行后(A)=E8H,(20H)、(R0)不变
• 解:答案见注释。
单片机原理及程序设计 第4章
• 2.算术运算类指令 • 算术运算指令是对寄存器及存储器单元进行“+”、
• 2.直接寻址:可访问SFR、内部RAM、位。如:
• MOV
• ANL • MOV
TH0,A
70H,#48H C,bit ;直接寻址,也属于立即寻址
单片机原理及程序设计 第4章
• 3.寄存器寻址:对象为R0~R7、A、B、DPTR等。
• 如MOV • MUL • MOV A,R3 AB @Ri,A ;i =0,1只有R0、R1可作间址寄存器
过“CLR C”指令,将进位标志Cy清零。
单片机原理及程序设计 第4章
• 【例4-3】试分析:在下列程序段指令顺序执行后,PSW中各
标志位的状态。 • MOV • ADD • ADDC • SUBB • ADD A,#10101101B
• ;把ADH送A中,P=1,PSW的其它位均为0 A,#10011101B
“-”、“×”、“÷”这四种基本运算的指令。
• 表4-3 为MCS-51的算术运算类指令集。
单片机原理及程序设计 第4章
单片机原理及程序设计 第4章
单片机原理及程序设计 第4章
• 1.加法指令的特点:
(1)目的操作数均是累加器A。寄存器、直接、寄存器间接、 立即等四种寻址方式,结果在A中; (2) 影响进位标志Cy、OV、Ac及P。 (3) 溢出标志OV为1的条件是:
•
• • •
MOV
MOV MOV MOV
R1,0E0H
B,@R1 @R1,P1 P址
;(B)=50H,间接寻址 ;(40H)=0CAH,间接寻址 ;(P2)=0CAH(P2为输出)
• 解:答案见注释。
单片机原理及程序设计 第4章
• 【例4-3】设(R0)=20H,(A)=4EH,片内RAM(20H) =85H。下列指令顺序执行,所涉及的单元(寄存器和存储器) 的内容如何变化? • XCH A,@R0
单片机原理及程序设计 第4章
• 4.1 从源程序到可执行代码 • 1.CPU的工作方式
• 计算机工作时,CPU总是周而复始地做取指——解释
指令——下达命令这一项工作。在每个指令周期中,
CPU先取指令代码,再对指令进行解析,产生决策,
由系统完成指令的功能。 • 指令代码是什么?它是怎样形成的?又是如何放入单 片机系统中的?
• 第2条指令执行的计算式如图4-2(a)所示。
单片机原理及程序设计 第4章
单片机原理及程序设计 第4章
作为无符号数,两数之和为14AH,即330,正确。 但结果超出FFH,进位的“1”自然丢失,寄存器A的
内容为4AH。进位值在CY中。
作为有符号数,两数之和应为-182。结果是4AH或
14AH都不对,此时,OV=1,说明“和”超出了值域,
• 4.寄存器间接寻址:可访问片内、外RAM。如:
• 5.变址寻址:由偏移量寄存器A和基址寄存器DPTR或PC的 “和”作为地址的寻址方式。如:
• MOVC • MOVC • JMP A,@A+DPTR A,@A+PC @A+DPTR ;MOVC专对ROM操作
单片机原理及程序设计 第4章
• 6.相对寻址:以PC的内容为加上指令中的偏移量作为转移地
构中的数据指针的变化方向。
• 例如: • INC INC R0 DPTR ;或INC R1
当操作数为FFH时,再加1,操作数将回到00H,而当操作 数为00H时,再减1,操作数将回到FFH。这一特点可形成8位 循环控制计数。 注意:DEC DPTR非法
单片机原理及程序设计 第4章
• 4)乘法和除法指令 • • • 只有MUL AB一条。功能如下: A 被乘数 × B 乘数 = B 积高8位 A 低 8位
• (4)写出基于CJNE指令实现判断两个正整数数量关系(大于、 等于、小于)的程序段。
• (5)说明定位汇编主程序0000H的道理及方法。又为什么主 程序的第一条指令通常都是跳转指令?
单片机原理及程序设计 第4章
• 数据传送指令包括: – (1) 内部RAM与SFR之间的数据传送,这类指令用 “MOV”作为指令助记符。 – (2) 外部RAM与A之间的数据传送,这类指令用
– 逻辑运算类。
– 控制转移类。 – 位操作类。 • 1.数据传送与互换类指令 • 数据传送与互换类指令列于表4-2中。
单片机原理及程序设计 第4章
单片机原理及程序设计 第4章
单片机原理及程序设计 第4章
• 第4章补充作业: • (1) 描述MOV A,Rn和MOV @Ri,A两条指令的功能。 • (2) 作图示意用RLC A指令,将3字节长度的正整数左移一 位的过程,进而再将这个数再左移一位,预测其结果。由此得 到结论:一个正整数左移一位数值变化的规律及保证正确的条 件是什么? • (3) 写出实现片将内30H中的内容求反的程序段。
单片机原理及程序设计 第4章
• 4.3.1 MCS-51汇编语言格式 • MCS-51系列单片机汇编语言格式如下:
• [标号]:<操作码助记符> [第一操作数],[第二操作数] ;注释
• 例如:
RET
;无第一操作数
CLP
MOV
A
;有第一操作数
A,75H ;有第1及第2操作数
4.3.2 MCS-51指令中的符号说明
• MOVX • MOVX • MOVX A,@Ri @Ri,A A,@DPTR
• 从时间、空间效率上讲,完全可用以下两条指令实现:
• MOVX
@ DPTR,A
一般情况下,对外部RAM操作用DPTR作为数据指针。 R0和R1只有在外部数据指针不够用,且这些数据位于第一 页(0~FFH)时,才使用它们。注:DPTR不能作为片内 RAM的数据指针。 • (7)数据传送指令不影响PSW内容,只是当数据送入A时才 影响奇偶标志位P。
单片机原理及程序设计 第4章
• 【例4-1】 设51机片内RAM中30H单元的内容为40H,而40H
单元的内容为50H。P1口作为输入口,数据为0CAH,下列指 令顺序执行时,相关单元的内容为何值? • • MOV MOV R0,#30H A,@R0 ;(R0)=30H,立即寻址 ;(A)=40H,间接寻址,P=1。