主动式光学三维成像技术
3D成像原理探究
3D成像原理探究一、3D成像原理简介3D(Three-dimensional)成像技术是指通过其中一种方式,在平面上观察一个立体空间,使得观察者能够感知到该空间的深度和距离感。
在计算机图形学、医学成像、虚拟现实等领域中,3D成像技术被广泛应用。
下面将从物理、光学以及计算机技术角度分析3D成像的原理。
二、物理原理1.线性退化原理在真实的三维空间中,离观察者远近不同的物体在成像上表现出不同的大小和清晰度。
这是因为远离观察者的物体将产生线性透视退化,使得它们的像变小变模糊。
通过观察不同距离的物体在成像平面上的表现,可以使观察者感知到空间的深度。
2.视差原理视差是通过两个眼睛观察同一个目标产生的效果。
两个眼睛位于不同的位置,因此它们所看到的目标位置会有微小的偏移。
大脑通过这种偏移量计算出目标与眼睛之间的距离,从而产生了深度感知。
三、光学原理1.光学立体成像采用光学方法进行3D成像时,通常会采用不同的观察角度获取物体的多张图像,然后通过计算机算法进行处理,生成带有深度信息的图像。
这些图像可以使用特殊的3D眼镜或者3D显示设备观察,通过左右眼的分屏显示或者极化光的分离来实现观察者的深度感知。
2.雷达成像雷达成像是一种利用电磁波进行3D测量的技术。
雷达装置发射射频信号,当它们与物体相交时,部分信号将被反射回来。
通过分析反射信号的时延、幅度和波形,可以计算出目标物体与雷达的距离和形状等信息,从而实现3D成像。
四、计算机技术1.光线追踪光线追踪是计算机图形学中一种用于模拟光线与物体交互的技术。
通过跟踪光线在场景中的传播路径,可以计算出光线与物体表面的交点和相互作用,最终生成逼真的3D成像效果。
2.结构光成像结构光成像是一种将物体投射结构光,利用相机观测物体变形后的光斑位置变化,从而计算出物体的三维形状的方法。
该技术广泛应用于工业检测、虚拟现实、人机交互等领域。
3.体积绘制体积绘制是一种通过描述物体的体积信息进行3D成像的技术。
三维成像原理

三维成像原理三维成像技术是一种通过特定的设备和方法来获取并显示物体三维空间信息的技术。
它在医学影像、工业设计、虚拟现实等领域有着广泛的应用。
在三维成像技术中,成像原理是至关重要的,下面我们将详细介绍三维成像的原理。
首先,我们来了解一下三维成像的基本原理。
三维成像的基本原理是通过获取物体表面的几何信息,并将其转化为数字信号进行处理和显示。
常见的三维成像技术包括激光扫描成像、立体摄影成像、光学投影成像等。
这些技术都是基于物体表面的几何信息来实现三维成像的。
其次,我们来介绍一下激光扫描成像的原理。
激光扫描成像是一种常见的三维成像技术,它利用激光器发射激光束,通过扫描物体表面并测量激光束的反射或散射来获取物体表面的几何信息。
通过对激光束的反射或散射进行精确的测量和分析,可以得到物体表面的三维坐标信息,从而实现三维成像。
除了激光扫描成像,立体摄影成像也是一种常见的三维成像技术。
立体摄影成像利用多个摄像头同时拍摄物体,通过对摄像头拍摄的图像进行匹配和处理,可以获取物体表面的三维信息。
这种方法可以利用摄像头的立体视角来实现三维成像,具有成本低、效果好的特点。
另外,光学投影成像也是一种常见的三维成像技术。
光学投影成像利用投影仪将特定图案投射到物体表面,通过对投影图案的变形和变化进行分析,可以获取物体表面的三维信息。
这种方法可以实现对物体表面进行快速、准确的三维成像,具有广泛的应用前景。
总的来说,三维成像技术是一种通过获取物体表面的几何信息来实现三维成像的技术。
激光扫描成像、立体摄影成像、光学投影成像等都是常见的三维成像技术,它们都是基于物体表面的几何信息来实现三维成像的。
随着科学技术的不断发展,三维成像技术将会在更多的领域得到应用,为人们带来更多的便利和惊喜。
主动式双目视觉三维成像技术研究

图像中心完全重合,即 Cl 和 Cr 并不是左右视图的中心点。
在 图 中 共 有 三 个 坐 标 系: xlol yl , xror yr 和 XOY 。
xlol yl 为 左 摄 像 机 的 坐 标 系, 其 中 cl (clx ,cly ) , Pl ( X l ,Yl ) 为
ol 坐标原点。 xror yr 为右摄像机的坐标系,其中 cr (crx ,cry )
, Pr ( X r ,Yr ) 以 or 为坐标原点。 XOY 为世界坐标系,其中
P( X ,Y , Z ) 以 O 坐标原点。
根据三角形相似原理,我们可以得知: ∆PPl Pr ∆POO′ 。
因此:
Pl Pr OO′
=
Z
− Z
f
98 | 电子制作 2018 年 4 月
实验研究
即:
实验研究
主动式双目视觉三维成像技术研究
牟科瀚,王泽勇 (西南交通大学物理科学与技术学院光电工程研究所,四川成都,610031)
摘要:本文引入结构光投影,通过投影随机散斑的方式,增加目标物体的特征点。实验结果表明,投影能有效的增加匹配点数、提高匹配 精度。将该方法用于列车底部件的三维成像,得到了较好的三维成像结果。 关键词:双目视觉;SIFT特征;结构光投影
双目视觉三维成像的数学模型如下图所示。为了数学 推导的简便,这先做两个假设:①透镜成像无畸变;②两 摄 像 机 成 像 是 行 对 准 的。 基 于 这 两 个 假 设, 得 到 空 间 点 P( X ,Y , Z ) 的深度与该店在左右视图中的坐标点 Pl ( Xl ,Yl ) 和 Pr ( X r ,Yr ) 的数学关系。
图 1 双目视觉系统数学模型
下面基于以上两个假设,进行数学推导。
sect3_3_主动光学_
使用主动光学的望远镜需要在光 路中分出一束光线,将其引入沙 克-哈特曼光栏检测装置。计算 机检测出像差,计算准泽尼克多 项式的系数,利用其与预先校 正值之差来调整各促动器施力大 小,并实时反馈。有的望远镜也 备有开环改正机制,需要了解望 远镜的受力和位置,适用于引导 星亮度不足或是检测装置失灵等 情况下的使用。
控制和补偿由于大气湍流引入的像畸变的技术称为自适应光学adaptiveoptics主动光学和自适应光学合在一起简称ao主动光学是在1980年代发展起来的它是在薄型主镜后方设有上百个计算机控制的促动器随时监测并抵消重力变形风力干扰和温度波动对成像的影响调整频率约001至1赫自适应光学主要补偿的则是大气湍动调整频率可达每秒上百次调整的对象也非主镜而是光路中专门设置的一块变形辅助镜大口径主镜难以承受高频调整
昴星团望远镜的自适应光学变形镜系统, 安装在卡塞格林焦点处(图片提供:NAOJ)
激光引导星和多共轭点( Multi-Conjugate ) 自 适 应光学系统。前者是向大 气中间层发射激光,激发 钠原子辐射出黄光,产生 人工引导星。目前凯克、 双子、昴星团、加拿大法国-夏威夷望远镜 、欧 洲南方天文台等处均配备 了激光引导星系统。至于 后者,是在光路中设置数 个变形镜来增大视场。另 外大口径变形镜也正在开 发中。
主动光学系统工作原理图 (Ed JanssenVLT主镜的促动器
Gemini N主镜(8.1m)厚仅20厘米,镜后有120个促动器,能单独上下移动万分之一到 千分之一头发丝厚度,只有咖啡杯大小。另外60个促动器压在主镜的周边。
主动式3D立体技术在LED显示屏中的应用

2 控 制 系统 设 计
3 显 示 屏 D
主 动 式 3 高 清 显 示 系 统 需 要 前 端 主 机 输 出 D
1 9 0 X 10 0 0 z的 D l 号 , E 显 示 屏 ,2 ,8 @1 H 2 V 信 LD 控 制 系 统 必 须 具 备 接 收 此 信 号 的 能 力 。 受 限 于
屏 体 的 闪烁 感 。 同时 ,液 晶眼镜 的透 光 率 一般 都 在 6 % 以 内 , 体 亮度 也 必须 保 持在 一 个合 适 的 数值 , 0 屏 以保证 观看 时 画面 的清晰 。综合 考虑 以上 因素 , 用 采
带 P M 功 能 的恒 流 驱 动 芯 片 可 以解 决 上 述 问题 , W
吴 星华 : 动 式 3 立 体 技 术 在 L D 显示 屏 中 的应 用 主 D E
曰成d l器 ■■ 蛐蛐 合I 啡 麟
图 1
应 用 于 舞 台背 景 和 户 外 显 示 。在 针 对 L D 主 动 发 E 光 器 件 的 3 显 示 方 面 , 合 考 虑 显 示 效 果 、 造 D 综 制
Ab t c :l t i ril,w e d s r e a e s r t n hs atce a e c i n w c ie s e e s o i D e h oo y i L b a t t r o c pc 3 t c n lg n ED v ds ly T e k y o hss s e i t e ip t3 i n l hc h ud b n lz d f s . e ipa . h e ft i y t m s h u D HD sg a ihs o l ea ay e i t Th n w r r q i m e t f ld ds ly a e hg e r s a e a d hg ry s ae w h n w a c ig 3 e ur e n s o e ipa r ih r fe h rt n ih g a c l e t hn D vd o . d i i sn e r ig t c n lg hc us it o lt n i ds ly ie s An s u ig a n w d i n e h oo y w ih i p le w d h m dua i n ipa t v S o u i o i p o et ef eig o iw e s nt t s m rv h e l fve n r. Ke wo d : E ipa ; c ies e e s o i 3 y r s L D ds ly a t t r o c pc D; ipa ; e r s a e P M ; ry c l v HD ds ly rfe hr t ; W g a s ae
光学三维测量技术应用举例并解析

光学三维测量技术应用举例并解析
光学三维测量技术是一种通过光学原理和数学模型来测量物体三维形态和位置的技术,可以应用于很多领域。
以下是一些光学三维测量技术的应用举例:
1. 航空航天:光学三维测量技术可以用于飞机、火箭、卫星等的设计、制造和维护中。
例如,利用激光三角测量法和相移法可以快速测量飞机机翼、机身的形态尺寸和表面粗糙度;利用三维扫描仪可以对航空设备进行三维建模,方便进行数字化制造。
2. 汽车制造:光学三维测量技术可以应用于汽车设计、制造、测试和维护中。
例如,在汽车制造过程中,可以利用激光三角测量仪对车身各部位进行快速、高精度的三维测量,以保证车身的精度和稳定性;利用三维扫描仪可以对汽车零部件进行三维建模。
3. 医疗领域:光学三维测量技术可以用于医学成像、手术导航和矫形医疗等领域。
例如,在牙科矫形过程中,利用激光三角测量仪可以快速,准确地测量牙齿位置和尺寸,以确定矫形方案。
4. 文化遗产保护:光学三维测量技术可以应用于文化遗产保护,如对文物、建筑、遗址等进行三维测量和数字化保护。
例如,利用三维激光扫描仪可以对文物、
建筑等进行全面而精确的三维数字化保护,方便后续保护、修复和展示。
总之,光学三维测量技术是一种非常实用的测量技术,可以在各个领域得到广泛应用,为很多工作带来了便利和效率提高。
分析激光雷达的三维成像方法
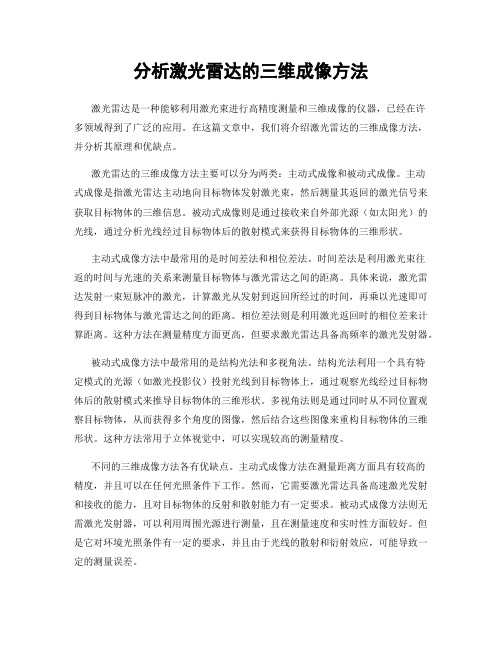
分析激光雷达的三维成像方法激光雷达是一种能够利用激光束进行高精度测量和三维成像的仪器,已经在许多领域得到了广泛的应用。
在这篇文章中,我们将介绍激光雷达的三维成像方法,并分析其原理和优缺点。
激光雷达的三维成像方法主要可以分为两类:主动式成像和被动式成像。
主动式成像是指激光雷达主动地向目标物体发射激光束,然后测量其返回的激光信号来获取目标物体的三维信息。
被动式成像则是通过接收来自外部光源(如太阳光)的光线,通过分析光线经过目标物体后的散射模式来获得目标物体的三维形状。
主动式成像方法中最常用的是时间差法和相位差法。
时间差法是利用激光束往返的时间与光速的关系来测量目标物体与激光雷达之间的距离。
具体来说,激光雷达发射一束短脉冲的激光,计算激光从发射到返回所经过的时间,再乘以光速即可得到目标物体与激光雷达之间的距离。
相位差法则是利用激光返回时的相位差来计算距离。
这种方法在测量精度方面更高,但要求激光雷达具备高频率的激光发射器。
被动式成像方法中最常用的是结构光法和多视角法。
结构光法利用一个具有特定模式的光源(如激光投影仪)投射光线到目标物体上,通过观察光线经过目标物体后的散射模式来推导目标物体的三维形状。
多视角法则是通过同时从不同位置观察目标物体,从而获得多个角度的图像,然后结合这些图像来重构目标物体的三维形状。
这种方法常用于立体视觉中,可以实现较高的测量精度。
不同的三维成像方法各有优缺点。
主动式成像方法在测量距离方面具有较高的精度,并且可以在任何光照条件下工作。
然而,它需要激光雷达具备高速激光发射和接收的能力,且对目标物体的反射和散射能力有一定要求。
被动式成像方法则无需激光发射器,可以利用周围光源进行测量,且在测量速度和实时性方面较好。
但是它对环境光照条件有一定的要求,并且由于光线的散射和衍射效应,可能导致一定的测量误差。
总体而言,激光雷达的三维成像方法在测量和建模方面具有很高的精度和准确性,已经在许多领域得到了广泛的应用。
生命科学中的三维成像技术
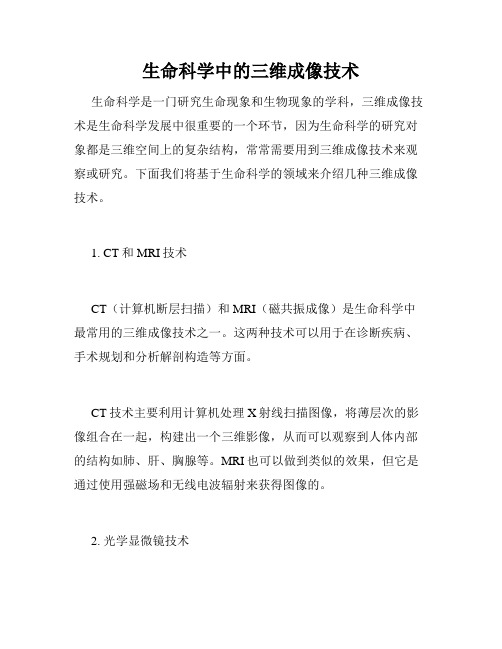
生命科学中的三维成像技术生命科学是一门研究生命现象和生物现象的学科,三维成像技术是生命科学发展中很重要的一个环节,因为生命科学的研究对象都是三维空间上的复杂结构,常常需要用到三维成像技术来观察或研究。
下面我们将基于生命科学的领域来介绍几种三维成像技术。
1. CT和MRI技术CT(计算机断层扫描)和MRI(磁共振成像)是生命科学中最常用的三维成像技术之一。
这两种技术可以用于在诊断疾病、手术规划和分析解剖构造等方面。
CT技术主要利用计算机处理X射线扫描图像,将薄层次的影像组合在一起,构建出一个三维影像,从而可以观察到人体内部的结构如肺、肝、胸腺等。
MRI也可以做到类似的效果,但它是通过使用强磁场和无线电波辐射来获得图像的。
2. 光学显微镜技术光学显微镜是生命科学中一种非常重要的三维成像技术。
它利用光学原理观察样本的形态和结构。
如果你看过昆虫的图片,你就会发现昆虫的视觉器官非常复杂,光学显微镜的应用使得我们可以观察到这样的细节。
除了普通的显微镜外,还有更为复杂的光学显微镜技术,如共焦显微镜、荧光显微镜、双光子激光显微镜等。
这些技术能够利用不同的物理原理,以不同的方式来构建出三维图像。
3. 电子显微镜技术电子显微镜是一种高分辨率的成像技术,也是生命科学中一种非常重要的技术。
通过使用以电子束为图像形成光源的电子显微镜,可以获得非常高分辨率的三维图像。
具体来说,我们常常使用常规的散射电镜(TEM)或透射电镜(SEM)进行成像。
电子显微镜可以让我们看到大量的结构和细节,例如细胞核、病毒、蛋白质等,我们甚至可以观察到原子水平的结构。
总结三维成像技术在生命科学中扮演着非常重要的角色。
无论是CT和MRI技术、光学显微镜技术还是电子显微镜技术,都是帮助我们更加深入地了解生命现象和生物现象,以及探索无限的可能性的技术。
这些技术的不断发展,会使我们有机会在一个更清晰、更准确、更有意义的层次上理解我们周围的世界。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
万方数据
万方数据
主动式光学三维成像技术
作者:周海波, 任秋实, 李万荣
作者单位:上海交通大学激光与光子生物医学研究所,上海,200030
刊名:
激光与光电子学进展
英文刊名:LASER & OPTOELECTRONICS PROGRESS
年,卷(期):2004,41(10)
被引用次数:6次
1.Noguchi M;Nayar S K Microscopic shape from focus using active illumination[外文会议] 1994(01)
2.Cohen F S;Patel M A A new approach for extracting shape from texture,Intelligent Control,1990 1990
3.Nayar S K;Watanabe M;Noguchi M Real-time focus range sensor[外文期刊] 1996(12)
4.Ghita O;Whelan P F A bin picking system based on depth from defocus[外文期刊] 2003(04)
5.POSDAMER J L;Altschuler M D Surface measurement by space-encoded projected beam systems[外文期刊] 1982(01)
6.WOODHAM R J Photometric method for determining surface orientation from multiple images 1980(01)
7.Miyasaka T;Kuroda K;Hirose M High speed 3-D measurement system using incoherent light source for human performance analysis 2000
8.Carrihill B;Hummel R Experiments with the intensity ratio depth sensor 1985
9.Maruyama M;Abe S Range sensing by projecting multiple slits with random cuts[外文期刊] 1993(06)
10.Caspi D;Kiryati N;Shamir J Range imaging with adaptive color structured light[外文期刊] 1998(05)
11.Horn E;Kiryati N Toward optimal structured light patterns[外文期刊] 1999(02)
12.Rocchini C;Cignoni P;Montani M A low cost 3D scanner based on structured light 2001(03)
13.Inokuchi S;Sato K;Matsuda F Range imaging system for 3-D object recognition 1984
14.Horn B K P;Brooks M Shape from Shading 1989
15.Schubert E Fast 3D object recognition using multiple color coded illumination[外文会议] 1997
16.Pulli K Acquisition and visualization of colored 3D objects[外文会议] 1998
17.Sato K;Inokuchi S Three-dimensional surface measurement by space encoding range imaging 1985(02)
18.Daniel Scharstein;Richard Szeliski High-Accuracy Stereo Depth Maps Using Structured Light[外文会议] 2003
19.Batlle J;Mouaddib E;Salvi J Recent progress in coded structured light as a technique to solve the correspondence problem: a survey[外文期刊] 1998(07)
20.Yoshizawa T The recent trend of moiremetrology 1991(03)
21.Li Zhang;Curless B;Seitz S M Rapid Shape Acquisition Using Color Structured Light and Multi-pass Dynamic Programming[外文会议] 2002
22.Sato T Multispectral pattern projection range finder 1999
23.EL-Hakim S F;Beraldin J A;Blais F A Comparative Evaluation of the Performance of Passive and Active 3-D Vision Systems 1995
1.欧阳俊华.OUYANG Jun-hua近距离三维激光扫描技术[期刊论文]-红外2006,27(3)
2.蔡喜平.李惠民.刘剑波.高劭宏.CAI Xi-ping.LI Hui-min.LIU Jian-bo.GAO Shao-hong主动式光学三维成像技术概述[期刊论文]-激光与红外2007,37(1)
1.王忠东.李国华.龚振宇.吴建忠.陈炜.刘亚雄.凌均棨.吴纪楠应用反求工程方法重建残冠和(或)残根的三维数字模型[期刊论文]-中华口腔医学研究杂志(电子版) 2011(4)
2.袁红照.李勇.何方三维点云数据获取技术[期刊论文]-安阳师范学院学报 2009(2)
3.王芳荣.赵丁选.尚涛.李晓天应用计算机视觉技术进行物体三维重构[期刊论文]-吉林大学学报(工学版)
2008(6)
4.胡江.高勃.韩彦峰.周玥序.吴江3DSS-Ⅱ彩色结构光扫描系统测量重建基牙预备体的可靠性和准确性研究[期刊论文]-实用口腔医学杂志 2007(3)
5.蔡喜平.李惠民.刘剑波.高劭宏主动式光学三维成像技术概述[期刊论文]-激光与红外 2007(1)
6.冯秋峰.任秋实.李万荣Inspeck成像扫描仪的三维成像技术[期刊论文]-激光与光电子学进展 2006(4)
7.郝平基于图像灰度的自由曲面重构算法研究[学位论文]博士 2005
本文链接:/Periodical_jgygdzxjz200410001.aspx。