《增控增稳系统》PPT课件
控制系统的稳定性 现代控制理论 教学PPT课件

2021年4月30日
第5章第21页
工程上往往喜欢渐近稳 定,因为希望干扰除去后, 系统又会回到原来的工作状 态,这个状态正是我们设计 系统时所期望的,也就是前 面所说的平衡状态。
x2 x0
s(ε) s(δ)
x1
渐近稳定
无论是李雅普诺夫意义下的稳定、渐进稳定,都属于系 统在平衡状态附近一小范围内的局部性质。因为系统只要在 包围 xe 的小范围内,能找到δ和ε满足定义中条件即可。至于 从s(δ)外的状态出发的运动,却完全可以超出s(ε)。因此,上 面涉及的是小范围稳定或小范围渐近稳定。
2)根据内部稳定性的定义,有u =0,系统由任意非零初态x0引起的响应xu(t)为
xu (t) y2 (t) x0 eAt x0 , t 0
系统是内部稳定,即渐近稳定的充分必要条件是状态转移矩阵满足下式
lim eAt 0
t
对于线性定常系统,满足上式的条件是系统矩阵A的所有特征值全部 具有负实部。
第5章第7页
5.1.2内部稳定性
零输入条件下的系统称为自治系统,其自治状态方程为
x A(t) x, x(t0 ) = x0, t t0
内部稳定性完全由内部状态变化所定义,考虑的是系统的零输入响 应,适用于线性、非线性、定常、时变等系统。其定义为:系统由任意 非零初态x(t0)引起的响应xu(t)有界,并满足渐近属性
2021年4月30日
第5章第28页
例5.2 x Ax + bu
0 0 0 0
A 0 1
0
,
b
0 ,
x(0)
x0, t
0
0 0 2 2
解 令u=0,系统的平衡状态为
x Ax 0
增控增稳系统
s 1
此时尾桨控制规律
r
K y y
s s
1
y
第二节 增稳系统
增稳系统是在阻尼器的基础上发展起来的,阻尼比和自然振 荡频率是反映飞行品质的基本参数.
阻尼器只简单地利用直升机运动的角度增加对短周期运动的阻
尼,提高直升机的等效阻尼系数:( mx wx , my wy , mz wy )。若引入加 速度或迎角、侧滑角等反馈信号,增加短周期运动的自然振荡 频以率将,原相本当静于不提稳高定直的升系机统的变静成稳稳定定性系导统数。:my , mx , mz 。可
受外作用(干扰或控制)M作用下满足的力矩平衡方程
•
J z M M z阻
J
•
z TYG
8 r
z
M
拉氏变换:
(Js K)z (s) M (s)
z (s) 1 k M (s) Js K z s 1
K
TYG
8 r
k 1 K
z
J K
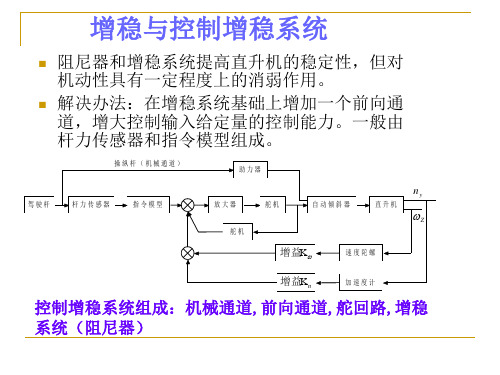
典型的一阶惯性环节,阶跃输入和响应 引入负反馈后结构方框图 , 阶跃响应近似于比例环节
直升机的滚转阻尼力 矩来自旋翼和尾桨。
旋翼产生的阻尼力矩 原因仍为具有陀螺定 轴性,旋翼锥体落后 于机身横向转动一个 角度,旋翼拉力对重 心构成一力矩,形成 滚转阻尼力矩 。
M xhu T z
尾桨产生阻尼力矩直升机右滚时,辅加相对气流会使尾桨桨叶迎角 增大,拉力增大,形成阻止向右滚转的阻尼力矩
❖引入俯仰角速度到纵向通道构成的直升机俯仰阻尼器
驾驶杆
操 纵 系 统 i1 -
自 动 倾 斜 器 i2
直 升 机 z
俯 仰 舵 回 路 Ki
放 大 器 KA
俯仰角速度
陀螺 Kz
第六章增稳与控制增稳系统2
XT (i) 为配平状态, U U (i) UT (i) 表示四个作动器相对于配平 位置的变化
假定:经历一个采样周期后,可使系统进入新的配平状态 X (i) X T (i) X (i 1) X (i) BD[U (i) UT (i)]
侧向气动模型及航向控制增稳系统
耦合作用
v
p a
N
r
N
r v
N
r p
Nra
杆 系
串联 舵机
助力器
自动倾 斜器
r Nrr
伺服控 制器
权限限制
静稳定性
N
r
0
1 r 1
r s
s
阻尼
N
r r
kr
杆位移传感器
M (S)
指令模型
k
增稳与控制增稳系统工作原理
机械稳定装置
贝尔稳定杆,洛克希德稳定杆,杭尼韦尔稳定杆 适用小型及跷跷板式旋翼直升机 稳定裕量有限,不能在全飞行包线内提供 稳定杆及其联动装置增加旋翼阻力
a 加速度计
z
助力器
自动倾斜器
方块图
指令模型 杆力传感器 FP
FP=0系统只起增稳作用 FP>0 =e+j
M (s)
Kp
N (s)
校正网络
+
Km 机械逻辑
助力器
+
Ka
放大
R(s)
B1(s)
伺服机构 + e
•
速度陀螺
Kg
自动倾斜器
B2 (s)
G• (s)
K ny
两反馈通道提高稳定精度n 加速度计
增稳控制方法、装置、增稳系统及计算机存储介质与流程

增稳控制方法、装置、增稳系统及计算机存储介质与流程在现代控制中,增稳控制是一种常见的技术,它的主要目的是解决系统中出现的状况变化的问题,以保持系统的稳定性。
增稳控制方法有多种,其中包括反馈控制、前馈控制、预测控制等。
在本文中,我们将介绍一些常见的增稳控制方法、装置、增稳系统及计算机存储介质与流程。
增稳控制方法1. 反馈控制反馈控制是一种常见的增稳控制方法,它通过对系统的输出进行监测,并通过反馈器将系统的输出与期望输出进行比较,进而对系统的输入进行调整。
因此,反馈控制是一种根据系统实际行为来调整控制的方法。
2. 前馈控制前馈控制是指在系统输入之前,根据事先得到的预测结果进行控制。
在前馈控制中,如果检测到输入的干扰信号,控制系统会根据预测结果对输入进行调整,从而保持系统的稳定性。
前馈控制可以大幅度降低系统对干扰信号的敏感度,提高系统的响应速度和控制精度。
3. 预测控制预测控制是一种根据未来预测结果进行控制的方法。
在预测控制中,控制器通过对系统的输入和输出进行监测和记录,然后利用这些数据进行预测,进而根据预测结果对系统的输入进行控制。
预测控制可以大幅度降低系统响应时延,减小误差,提高控制精度。
增稳控制装置1. 增稳控制器增稳控制器是一种用于增稳控制的装置,它通过将传感器的信号转化为电信号,然后进行数学运算产生输出信号的方式来实现增稳控制。
增稳控制器通常包括数字信号处理器、功率放大器、滤波器和反馈器等组件。
2. 功率放大器功率放大器是一种用于放大控制信号的装置,它通常应用于驱动高功率负载的控制系统中。
功率放大器能够将较弱的控制信号转换为高功率的输出信号,从而驱动高功率负载。
3. 传感器传感器是一种用于将物理量或化学量转换为电信号的装置。
传感器可以测量温度、压力、湿度、流量等物理量,然后将这些物理量转换为相应的电信号,供增稳控制器进行处理。
增稳控制系统增稳控制系统一般由传感器、控制器、执行机构三部分组成。
控制系统的稳定性与快速培训课件

若Z=0,则闭环系统稳定,
Z 0 则闭环系统不稳定
Z为闭环特征方程正实部根旳个数。
例:如图5-17所示旳四种开环Bode曲线,试用Nyquist稳 定性判据, 判断系统旳稳定性。
已知P=0,在L(ω)≥0旳范围内,
N 1 N 1 N N N 0
Z P 2N 0
例5-7 设某控制系统旳特征方程为
s6 s5 2s4 3s3 7s2 4s 4 0
用Routh判据拟定系统正实部根旳个数。 解 列出Routh表
s6 1 2 7 4
s5 1 3 4
s4 1 3 4 辅助方程为 s3 0 0 0
(辅助方程A(s)=0系数)
A(s) s4 3s2 4 0
假如系统不能恢复稳定状态,则以为系统不 稳定。
mF F
单摆系统稳定
倒摆系统不稳定
a b
e d
c
The concept of stability
o
cF
b
a
M
o
The balance of a pendulum
The balance of a small ball
A necessary and sufficient condition for a feedback
n
A(s) a0 (s pi ) i 1
由多重根旳韦达定理得:
a1 a0
( p1
p2
pn )
a2 a0
( p1 p2
p1 p3
pn1 pn )
a3 a0
( p1 p2 p3 p1 p2 p4 pn2 pn1 pn )
an a0
(1)n ( p1 p2 p3 pn )
直升机飞行控制第3章
第三章 直升机的增稳与控制增稳系统直升机作为控制对象与固定翼飞机相比有更复杂的动力学。
除了应考虑机体的六自由度运动以外,还必需考虑旋翼及尾桨相对于机身的旋转,以及桨叶相对于挥舞铰的运动。
这些决定了直升机具有较差的稳定性与操纵性。
早期的直升机由于执行任务比较简单,性能要求也比较低,直升机的不稳定运动模态发散周期比较长,驾驶员可以对这种不稳定的发散模态进行不断的人工修正。
随着直升机性能不断提高,以及执行的任务越来越复杂,特别是武装直升机不仅要执行反潜,对地攻击,对空射击,而且要完成超低空贴地飞行,进行地形跟随与地形回避机动,还需要抵御阵风扰动等,再加上直升机固有的不稳定性,仅依靠人工操纵已十分困难,所以与固定翼飞机相比,更需采用增稳系统(SAS )、控制增稳系统(CSAS )或自动飞行控制系统(AFCS ),并不断引入主动控制技术,向着电传操纵(FBW )及光传操纵方向发展。
本章将论述在人工操纵状态下的各工作通道的增稳及控制增稳系统基本工作原理、典型结构及设计方法。
为便于论述工作原理、便于设计和仿真,本章首先构建了以结构图形式给出的直升机四通道线性动力学模型。
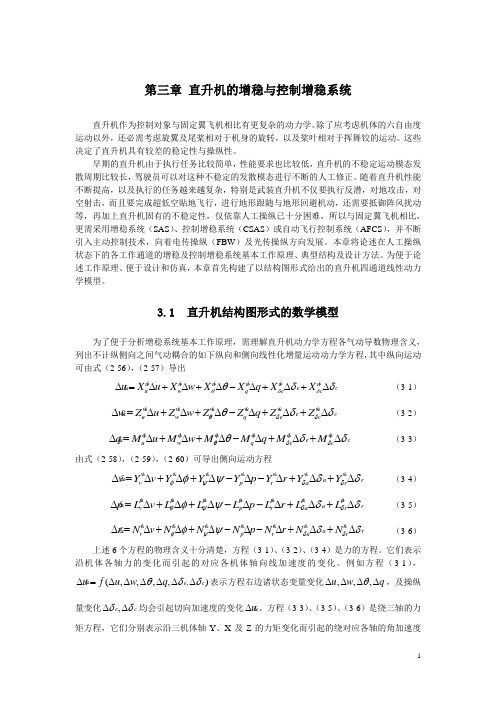
3.1 直升机结构图形式的数学模型为了便于分析增稳系统基本工作原理,需理解直升机动力学方程各气动导数物理含义,列出不计纵侧向之间气动耦合的如下纵向和侧向线性化增量运动动力学方程,其中纵向运动可由式(2-56),(2-57)导出u u u u u ue c u w q e c uX u X w X X q X X θδδθδδ∆=∆+∆+∆-∆+∆+∆ (3-1) w w w w w we c u w q e c w Z u Z w Z Z q Z Z θδδθδδ∆=∆+∆+∆-∆+∆+∆ (3-2) q q q q q q e c u w q e c q M u M w M M q M M θδδθδδ∆=∆+∆+∆-∆+∆+∆ (3-3)由式(2-58),(2-59),(2-60)可导出侧向运动方程v v v v v v v a r v p r a r vY v Y Y Y p Y r Y Y φψδδφψδδ∆=∆+∆+∆-∆-∆+∆+∆ (3-4) p p p p p p p a r v p r a r p L v L L L p L r L L φψδδφψδδ∆=∆+∆+∆-∆-∆+∆+∆ (3-5) r r r r r r r a r v p r a r r N v N N N p N r N N φψδδφψδδ∆=∆+∆+∆-∆-∆+∆+∆ (3-6)上述6个方程的物理含义十分清楚,方程(3-1)、(3-2)、(3-4)是力的方程。
5.3控制增稳系统
z
并假定指令模型为
M ( s) = k M
代入传递函数(5-47)后,写成
& ( s ) = ( k j + k p kδ k M )k Z G B ( s ) ∆q
lim f (t ) = lim sF ( s )
t →0 s →∞
根据拉普拉斯变换的初始定理和终值定理可知, 初始值满足关系式
& (t ) = lim( k j + k p kδ k M )k Z ⋅ s ⋅ lim ∆q
可见,机械通道(不可逆助力操纵系统) 杆力梯度是与纵向的量纲导数 和短周期固有频率
Zα 、 M δ
e
ω sp
有关的。
2控制增稳系统的杆力特性(将增稳系统及 电气前馈通道接通)
∆nZ ( s ) = [k j + k p kδ M ( s )] nZ nZ q ∆Fy ( s ) + ky 1 + kδ ka [k y Gq ( s )]k z Gδqe ( s ) = [k j + k p kδ M ( s )]kZ 1 nZ + k k k k ] z δ a y [1 + nZ nZ nZ q Gδ e ( s )Gq ( s ) k y Gq ( s )
5.3 控制增稳系统
阻尼器和增稳系统的局限性: 1.阻尼器与增稳系统能提高阻尼比和固有频率,却 牺牲了操纵性; 2.阻尼器和增稳系统无法解决非线性操纵指令问 题,即当大机动飞行时,要求飞机具有较高的操 纵灵敏度,而小机动飞行时,则要求有较小的操 纵灵敏度。(眼镜蛇机动与空中加油)
z
MIG-29-OVT战斗机眼镜蛇机动
q 57.3gk y
k V
nZ y
控制增稳与电传控制律7-8
三、控制增稳系统对飞机稳定性和操纵品质的影响
飞机的稳定性和操纵性
飞机的稳定性又称为安定性,它是飞机本身固有的一种运动属性。从气动力学的观 点看,飞机稳定性主要是由恢复力矩和阻尼力矩决定的,在实际中,稳定性又分为静稳 定性和动稳定性。所谓静稳定性是指飞机平衡状态受到扰动,在扰动消失后,飞机本身 具有恢复原平衡状态趋势的能力。动稳定性是指飞机的受扰运动在扰动源撤销后,飞行 员不操纵飞机,飞机能渐近地回到扰动前的运动状态。静稳定性和动稳定性的区别是: 静稳定性研究的仅是飞机受到扰动后初始反应的趋势; 而动稳定性研究飞机受扰动后的 全过程。 飞机的操纵性指飞机(包含控制系统)对驾驶员操纵输入的响应特性, 即按照驾驶员 操纵意图(指令信号),在一定时间内能迅速改变其飞行状态的能力,或简单说飞机听从 驾驶杆的能力。操纵性表现为驾驶员对杆力/杆位移的感觉和飞行状态改变快慢的视觉 等两方面。如果当飞机对操纵意图的反应特性既迅速又准确地复现了,则称飞机的操纵 性好。从操纵功用而言,飞机应具有机动能力(使飞机实现最大法向过载,最大滚转速 度的能力)和配平能力(对起飞着陆、平飞)。
e
2)控制增稳系统杆力特性 :
传递函数为(将增稳系统及电气前馈通道接通):
n z s Fy s
k p M s
kj k
q 1s ky 1 s 1 s 1 nz 3 1 k k y a nz nz nz k k z G e s 2 s 1 k y Gq s
一、控制增稳系统的构成与工作原理
二、俯仰控制增稳系统的控制律
比例控制律为:
q y
其中:
e K q K nz kz k p M s k Fy kz k j Fy
第五章-1 阻尼器与增稳系统解读
如何解决飞机水平转弯,引起附加俯仰角速度增量的问题?
典型舵回路 位置反馈:使控制信号与舵机输出信号成比例关系。 速度反馈:增大舵回路的阻尼,改善舵回路动态特性。
概述---典型飞行控制系统的构成
三个反馈回路:舵回路、稳定回路和控制(制导)回路
典型稳定回路 测量部件+舵回路=自动驾驶仪 自动驾驶仪+飞机=稳定回路---稳定和控制飞机姿态
概述---典型飞行控制系统的构成
水平转弯时俯仰角速度增量为低频信号可以应用配平舵机并加入清洗网络高通滤波器滤掉速率陀螺输出信号的稳定分量使稳定水平盘旋或者转弯飞行时产生不影响俯仰阻尼器工作
第五章 典型飞行控 制系统分析
概述 阻尼器与增稳系统
南京航空航天大学金城学院 赵宾 2010,11
概述---典型飞行控制系统的构成
三个反馈回路:舵回路、稳定回路和控制(制导)回路
阻尼器
以飞机的角速度作为反馈信号,稳定飞机的角速度,相当 于增大飞机的阻尼,抑制振荡,改善飞机的性能。 飞机的姿态运动分解为绕三个机体轴的角运动,因此以姿 态角变化量为被控变量的阻尼器也分为俯仰阻尼器、滚转 阻尼器和偏航阻尼器。
飞机俯仰阻尼器系统的方框图
阻尼器
俯仰阻尼器
主要作用:改善飞机的纵向短周期运动的阻尼特性。 工作原理和控制规律:
性能分析:
无阻尼器传递函数:
无阻尼器静态增益:
阻尼器
俯仰阻尼器
性能分析:
有阻尼器传递函数:
有阻尼器静态增益: 固有频率:
阻尼比:
阻尼器
俯仰阻尼器
性能分析: 适当选择阻尼器的控制率增益 改善飞机的阻尼特性。 可增大阻尼比 ,
【精选】提高系统静态稳定性的措施PPT资料
面着手。下面分别从这几方面分析,提出 3因.此减,小总系的统来各看元,件提的高电电抗力以系提统高的功静率态极稳限定性,主要在于提高稳定功率极限,也就是提高传输功率极限。
提高系统静态稳定性的措施
1.提高系统电压U
功(率2)极减限小值变越压高器,电静抗态。稳定储备越大,业技术学院
提高系统静态稳定性的措施
由式
Kp
PM P0 P0
100%
可知,发电机稳定
功率极限值越高,静态稳定储备越大,则系 统的静态稳定性越高。因此,总的来看,提 高电力系统的静态稳定性,主要在于提高稳 定功率极限,也就是提高传输功率极限。
由式
(1)减小发电机电抗。
提3.高减系小统系静统态各稳元定件性的的电措抗施以提高功率极限
极(限1)值减,小可发以电从机提电高抗系。统电压、发电机的端电势E0和减少系统各元件的电抗这三方面着手。
端电势E 和减少系统各元件的电抗这三方 2功.率提极高限发值电越机高的,端静电态势稳E定0 储备越大,则系统的静态稳定性越高。
0 13..提减高小系系统统电各压元U件的电抗以提高功率极限
PM
EqU xd
可知,要提高功率
提下高面系 分统别静从态这稳几定方性面的分措析施,提出提高电力系统静态稳定性的措施。
极限值,可以从提高系统电压、发电机的 因a)此采,用总分的裂来导看线,提高电力系统的静态稳定性,主要在于提高稳定功率极限,也就是提高传输功率极限。
a提)高采系用统分静裂态导稳线定性的措施
意义的一种途径。 a)采用分裂导线 b)采用串联电容补偿
感谢观看
提高电力系统静态稳定性的措施。 21..提提高高系发统电电机压的U端电势E0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直升机的自然安定性: 直升机在俯仰转动过程中受到阻尼力矩,主要是旋翼 产生。直升机突然受扰,机头上仰的瞬间,由于旋翼 具有陀螺的定轴性,旋翼锥体瞬间不变。当机头已上 仰角度后,旋翼锥体才以角速度开始随机头上仰而向 后倾斜,即直升机在上仰过程中.旋翼锥体后倾始终 比机身转动迟后一个角度,直到转动停止。
阻尼器只简单地利用直升机运动的角度增加对短周期运动的阻 尼,提高直升机的等效阻尼系数:( mx wx , my wy , mz wy )。若引入加 速度或迎角、侧滑角等反馈信号,增加短周期运动的自然振荡 频以率将,原相本当静于不提稳高定直的升系机统的变静成稳稳定定性系导统数。:my , mx , mz 。可
同理,当直升机向右偏转时,桨叶迎角减小,拉力减小,形成阻止机头向右 偏转的阻尼力矩。 一旦停止偏转转动时,阻尼力矩也就自然消失。
偏航阻尼器结构原理方块图
脚蹬 操纵系统
-
自 动 倾 斜 器 r 直 升 机 z
航向舵回路
放大器
航向角速度 陀螺
控制规律
r
K
y
y
y
直升机悬停、前 飞、垂直飞行时 工作正常。
增稳系统含有: 俯仰增稳系统; 滚转增稳系统; 航向增稳系统。
一、俯仰增稳系统
直升机受扰机头上仰,由于机身迎角变化,旋翼桨叶迎角随之变化, 机头上仰使旋翼迎角由小变大,由于旋翼迎角变化,飞行速度垂直于 旋转平面的分量w在任意方位上都减小 ,而桨叶此面迎角增大。前飞 时,构造平面上的周向来流速度分布不均,前行桨叶来流速度大,升 力增多,后行桨叶来流速度小,升力减小,导致桨叶平面更加后倾, 产生附加的抬头力矩,直升机继续上仰,使迎角静不稳定,迎角的变 化对桨盘动作的影响相当于正反馈。
直升机进行稳定转弯时,由于需要建立倾斜角,会在Y 轴上得到分量。
y cos
尾桨变距量导致侧滑角增大
r
K
y
y
cos
解决办法是引入高通滤波器 s
s 1
此时尾桨控制规律
r
K y y
s s
1
y
第二节 增稳系统
增稳系统是在阻尼器的基础上发展起来的,阻尼比和自然振 荡频率是反映飞行品质的基本参数.
K z z
s s
1
z
为高通滤波器时间常数。
(二)滚转阻尼器
用于提高直升机绕纵轴滚转运动的阻尼。
旋翼产生阻尼力矩源于旋翼的陀螺定轴性,当直升机机 体绕纵轴滚转时, 旋翼锥体落后于机身横向转动的角度。
直升机的滚转阻尼力 矩来自旋翼和尾桨。
旋翼产生的阻尼力矩 原因仍为具有陀螺定 轴性,旋翼锥体落后 于机身横向转动一个 角度,旋翼拉力对重 心构成一力矩,形成 滚转阻尼力矩 。
受外作用(干扰或控制)M作用下满足的力矩平衡方程
J z M M z阻
J
z TYG
8 r
z
M
拉氏变换:
(Js K)z (s) M (s)
z (s) 1 k M (s) Js K z s 1
K
TYG
8 r
k 1 K
z
J K
典型的一阶惯性环节,阶跃输入和响应 引入负反馈后结构方框图 , 阶跃响应近似于比例环节
等效传递函数:
k
k
z (s) s 1
k
M (s) 1 kK s 1 K
1 kK
s 1
s 1
1 kK
z (s)
M (s)
k' 's 1
k'
k' k 1 kK
'
1 kK
'
当直升机受到外扰M后,就可立即产生俯仰角速度,也就使
滚转舵回路
放大器
滚转角速度 陀螺
控制规律
a
K
x
x
x
(三)偏航阻尼器
偏航阻尼器用于提高直升机绕竖轴滚转运动的阻尼。 直升机在偏航转动过程中会产生阻尼力矩,偏航阻尼力矩主要来源于 尾桨。
当直升机受扰后,以角速度y向左偏转,尾桨以y.Lj切线速 度向右摆动。轴向来流从尾桨右侧向左流过,轴向来流方向与尾 桨诱导速度的方向相反,使尾桨桨叶的迎角增加,拉力增大,从 而形成阻尼力矩阻止机头向左偏转。
M xhu T z
尾桨产生阻尼力矩直升机右滚时,辅加相对气流会使尾桨桨叶迎角 增大,拉力增大,形成阻止向右滚转的阻尼力矩
M xhu Twj Ywj
当直升机左滚时,尾桨桨叶迎角减小,拉力减小,形成 阻止向左滚转的阻尼力矩。
滚转阻尼器结构原理方块图
驾驶杆
-
操纵系统
自 动 倾 斜 器 a 直 升 机 x
第六章 直升机阻尼、 增稳和控制增稳
阻尼器与增稳系统都是用来改善直升机稳定性的 装置。
阻尼器是用来增大直升机的角速度阻尼,使直升 机运动时的角速度振荡衰减。阻尼器是一种最简单 的增稳装置。
第一节 阻尼器系统
阻尼器按其所阻尼的运动不同,分为俯仰阻尼器, 滚转阻尼器和偏航阻尼器.
(一)俯仰阻尼器
Kz K AKii1i2
当直升机稳定转弯时,由于直升机绕X轴滚转角度,沿z轴有分量, 此时尽管直升机没有绕Z轴俯仰,角速度陀螺仍能感受此分量,导致 自动倾斜器纵向偏转一个角度。
解决办法:高通滤波器即洗出电路
传递函数为:
U出(s) s U入 (s) s 1
控制规律为:
e
阻尼力矩 M 向稳定性。
立刻产生,来抑制外扰,从而提高直升机的纵
z阻
引入俯仰角速度到纵向通道构成的直升机俯仰阻尼器
ห้องสมุดไป่ตู้
驾驶杆
操 纵 系 统 i1 -
自 动 倾 斜 器 i2
直 升 机 z
俯 仰 舵 回 路 Ki
放 大 器 KA
俯仰角速度
陀螺 Kz
对应控制规律为:
e
K
z
z
z
K z z
俯仰转动过程受阻情况
桨盘落后角为:
8z
z 直升机俯仰角速度
旋翼转动角速度
C
y
bR4
桨叶质量特性系数
2Ib
I b 桨叶绕水平铰的质量惯性矩
旋翼拉力对直升机重心构成一个阻止机头上仰的阻尼力矩
M z阻 T sin YG T YG
旋翼拉力一定时,旋翼产生的阻尼力矩与俯仰角速度成正比。显然,增大 俯仰角速度对增加旋翼的阻尼有益。可提高直升机遇到外干扰时纵向运动 的稳定性。但是直升机运动具有惯性,当遇到外作用时,不能立即产生, 也就不能立即产生应有的阻尼力矩,故需要采取措施。