双闭环三相异步电动机调压调速系统的仿真设计
双闭环三相异步电机调压调速系统实验报告

“运动控制系统”专题实验r2 r2+Rs1 r2+Rs2 r2+Rs3sm sm1 sm2 s Tem图6-1整个调速系统采用了速度,电流两个反馈控制环。
这里的速度环作用基本上与直流调速系统相同而电流环的作用则有所不同。
在稳定运行情况下,电流环对电网振动仍有较大的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。
异步电机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正,反转,反接和能耗制动。
但在恒转矩负载下不能长时间低速运行,因低速运行时转差功率全部消耗在转子电阻中,使转子过热。
2.双闭环异步电机调压调速系统的机械特性。
转子变电阻时的机械特性:3.三相异步电机的调速方法三种类型:转差功率消耗型:调压、变电阻等调速方式,转速越低,转差功率消耗越大。
转差功率馈送型:控制绕线转子异步电机的转子电压,利用转差功率可实现调节转速的目的。
如串级调速。
转差功率不变型:转差功率很小,而且不随转速变换,如改变磁极对数调速,变频调速。
1)定子调压调速当负载转矩一定时,随着电机定子电压的降低,主磁通减少,转子感应电势减少,转(2)空载电压为200V时n/(r/min) 1281 1223 1184 1107 1045I G/A 0.10 0.11 0.12 0.13 0.13U G/V 182 179 176 166 157 M/(N·m) 0.2265 0.2458 0.2636 0.2814 0.28312.闭环系统静特性n/(r/min) 1420 1415 1418 1415 1416 1412I G/A 0.11 0.14 0.16 0.19 0.21 0.26U G/V 203 200 201 200 200 199 M/(N·m) 0.2394 0.2795 0.3080 0.3777 0.3496 0.4482 静特性曲线:与开环机械特性比较,闭环静特性比开环机械特性硬得多,且随着电压降低,开环特性越来越软。
异步电机调压调速系统设计与仿真

学 号 学生姓名 专业班级课程设计(论文)题目异步电动机调压调速系统的设计及仿真课程设计(论文)任务 课题完成的功能:分别完成异步电动机的开环、单闭环和双闭环调压调速系统的设计;在此基础上,开发开环调压调速系统的仿真软件,并进行仿真实验。
设计任务及要求:1、设计开环、单闭环和双闭环调压调速系统的结构原理图;2、设计开环、单闭环和双闭环调压调速系统的控制方案,并在实验室中分别实现开环、单闭环和双闭环调压调速系统;3、以开环调压调速系统为例,开发仿真软件,仿真实验的结果与理论分析和实物实验相一致; 技术参数:1、电动机的额定功率0.12Kw ,额定电压220V ,额定电流0.6A ,额定转速1380pm 。
2、速度控制系统的精度在±1%以内。
进度计划1、熟悉课程设计题目,查找及收集相关书籍、资料(2天);2、设计系统的结构原理图(2天);3、实现各种调速系统(3天);4、仿真软件开发(1天);5、撰写课设论文(1.5天);6、设计结果考核(0.5天);指导教师评语及成绩平时: 论文质量: 答辩:总成绩: 指导教师签字:年 月 日摘要简单介绍了异步电动机调压调速系统的几大组成部分,分析了异步电机调速的原理,在了解异步电动机调压调速的基本原理的基础上,依次设计了异步电动机开环、单闭环、双闭环调压调速系统的结构原理图、控制方案,并且在实验室实现了异步电动机调压调速系统。
以开环调压调速系统为例,基于Matlab语言开发仿真软件,并进行仿真实验,记录仿真数据。
关键词:异步电动机调压调速 Matlab 仿真目录第1章绪论 (1)第2章异步电动机调压调速系统 (2)2.1 三相异步电动机的结构与基本原理 (2)2.1.1 三相异步电动机定子 (2)2.1.2 三相异步电动机转子 (2)2.1.3 三相异步电动机气隙 (3)2.1.4 三相异步电动机的基本工作原理 (3)2.2 转差率 (4)2.3 异步电动机运行的三种状态 (4)第3章异步电动机调压调速系统的设计 (6)3.1 开环调压调速 (6)3.2 单闭环调压调速系统 (9)3.3 双闭环调压调速系统 (13)第4章开环调压调速系统仿真 (15)4.1 交流仿真调压程序 (15)4.2 各部分参数设置 (16)第5章课程设计总结 (22)参考文献 (23)第1章绪论目前,国外先进的工业国家生产直流传动的装置基本呈下降趋势,而交流变频调速装置的生产大幅度上升。
三相异步电动机变频调速系统设计及仿真

三相异步电动机变频调速系统设计及仿真引言:随着现代工业生产的不断发展,能源的需求也越来越大。
传统的电动机调速系统通常采用机械传动或者直接调节电压、频率等方式来实现调速,但是这些方法存在效率低、调速精度不高等问题。
为了解决这些问题,引入变频调速技术,可以通过改变电机供电频率来实现调速,不仅能够提高效率,还可以实现精确调速。
因此,本文设计了一种三相异步电动机变频调速系统,并进行了仿真验证。
一、系统框架设计本文设计的三相异步电动机变频调速系统主要包括三相异步电动机、变频器、控制器和传感器等几个主要组件。
其中,三相异步电动机作为执行部分,负责将电能转换成机械能,变频器作为调速部分,通过改变输入电压频率来控制电机转速。
控制器则负责监测和控制整个系统的工作状态,传感器则用来获取电机的实时状态信息,如电流、转速等。
二、电机模型建立为了进行仿真验证,需要建立电机的数学模型。
三相异步电动机可以通过电磁转矩方程来描述其动态特性。
根据电路分析和电磁场理论,可以得到如下电机转矩方程:T=(3*ρ*f*V^2*s)/(2*π*N_1)其中,T为电机转矩,ρ为极数,f为电机运行频率,V为电机定子端电压,N_1为电机定子匝数,s为滑差。
根据这个方程,可以通过调节频率和滑差来控制电机的转矩和转速。
三、变频器控制策略变频器是实现电机调速的关键设备,其工作原理是通过改变输入电压频率实现输出电压频率的调节。
常见的变频器控制策略有开环控制和闭环控制两种。
开环控制是根据电机的数学模型,通过计算期望转速和实际转速之间的误差,来调节输出电压频率;闭环控制则需要实时监测电机的转速,并将实际转速与期望转速进行比较,来调节输出电压频率。
四、系统仿真验证为了验证设计的变频调速系统的性能,需要进行仿真实验。
通过MATLAB/Simulink软件,可以搭建一个模拟的实验环境,获取电机的转速、电流等实时状态信息,并对比期望转速和实际转速之间的误差。
根据不同的控制策略,可以得到不同的调速结果,并通过比较分析来选择最优的控制策略。
双闭环三相异步电动机调压调速系统的仿真设计

吉林建筑大学城建学院课程设计报告题目名称双闭环三相异步电动机调压调速系统的仿真院(系)电气信息工程系课程名称电力拖动自动控制系统班级电气11-1学号*********学生姓名李林指导教师柏逢明起止日期2015.3.2-2015.3.13目录摘要 (I)ABSTRACT (II)第1章双闭环三相异步电动机调压调速系统 (1)1.1设计原理 (1)1.2工作原理 (2)1.2.1 控制电路 (2)1.2.2 移相触发电路 (2)第2章设计方案 (3)2.1 主电路设计 (3)2.1.1 调压电路 (3)2.1.2 开环调压调速 (3)2.1.3闭环调压调速 (4)2.2 控制回路设计 (5)2.2.1转速检测环节和电流检测环节的设计 (5)2.2.2调速系统的静态参数分析 (9)2.3 触发电路设计 (11)第3章仿真设计 (12)3.1 调压电路 (12)3.1.1 调压电器的仿真模型 (12)3.1.2 参数的设定 (13)3.1.3电阻负载的仿真图形 (14)3.2 异步电动机带风机泵类负载开环调压调速模块 (15)3.2.1 参数设定 (15)3.2.2闭环调压 (18)结论 (21)致谢 (22)参考文献 (23)摘要调压调速是变转差率调速的一种。
由电机原理可知当转差率s基本保持不变时,电动机的电磁转矩与定子电压的平方成正比,因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的。
改变加在定子上的电压是通过交流调压器实现的。
目前广泛采用的交流调压器由晶闸管等器件组成。
它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间,通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压。
晶闸管三相交流调压电路的连结方式很多,各有其特点。
双闭环调压调速特性以前用饱和电抗器,现在广泛采用晶闸管调压电路。
在前面所述的开环系统的调速中,其机械特性软,调速范围较窄。
加转速负反馈系统环节后成了调压调速的闭环控制系统。
双闭环三相异步电动机调压调速系统
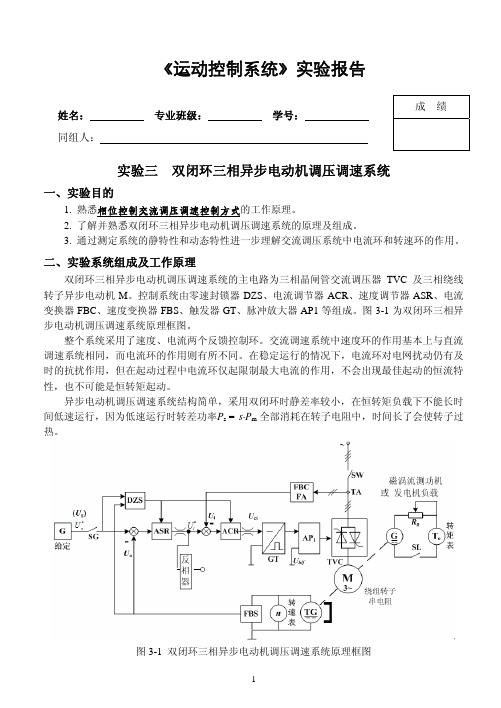
《运动控制系统》实验报告成绩姓名:专业班级:学号:同组人:实验三双闭环三相异步电动机调压调速系统一、实验目的1. 熟悉相位控制交流调压调速控制方式的工作原理。
2. 了解并熟悉双闭环三相异步电动机调压调速系统的原理及组成。
3. 通过测定系统的静特性和动态特性进一步理解交流调压系统中电流环和转速环的作用。
二、实验系统组成及工作原理双闭环三相异步电动机调压调速系统的主电路为三相晶闸管交流调压器TVC及三相绕线转子异步电动机M。
控制系统由零速封锁器DZS、电流调节器ACR、速度调节器ASR、电流变换器FBC、速度变换器FBS、触发器GT、脉冲放大器AP1等组成。
图3-1为双闭环三相异步电动机调压调速系统原理框图。
整个系统采用了速度、电流两个反馈控制环。
交流调速系统中速度环的作用基本上与直流调速系统相同,而电流环的作用则有所不同。
在稳定运行的情况下,电流环对电网扰动仍有及时的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。
异步电动机调压调速系统结构简单,采用双闭环时静差率较小,在恒转矩负载下不能长时间低速运行,因为低速运行时转差功率P s = s·P m 全部消耗在转子电阻中,时间长了会使转子过热。
图3-1 双闭环三相异步电动机调压调速系统原理框图三、实验注意事项1.绕线式异步电动机M09参数:P N=100W,U N=220V,I N=0.55A,n=1350r/min,Y接。
2.不允许突加给定信号起动电动机,给定信号尽可能从0缓慢起调,且须空载起动。
3.测取系统静特性时,须注意电动机电流不允许超过额定电流(0.55A)。
4.电动机低速时,实验时间应尽量短,以免串接的电阻器过热而引起电阻数值变化。
四、实验内容1. 测定系统控制特性电动机空载条件下(发电机或测功机负载回路开路),调节给定电压U n*,使电动机转速慢升至额定转速1350r/min,在0~1350 r/min之间记录几组转速n和给定电压U n*的数据,并在图3-2所示的坐标系中画出系统控制特性曲线。
双闭环三相异步电动机调压调速的系统设计与仿真课程设计

第1章绪论1.1 双闭环三相异步电动机调压调速系统的原理和组成调压调速即通过调节通入异步电动机的三相交流电压大小来调节转子转速的方法。
理论依据来自异步电动机的机械特性方程式:其中,p为电机的极对数;为定子电源角速度;w1U为定子电源相电压;1’为折算到定子侧的每相转子电阻;R2R为每相定子电阻;1为每相定子漏感;L11L为折算到定子侧的每相转子漏感;12S为转差率。
图1-1异步电动机在不同电压的机械特性由电机原理可知,当转差率s基本保持不变时,电动机的电磁转矩与定子电压的平方成正比。
因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的1.2 双闭环三相异步电动机调压调速系统的工作原理系统主电路采用3个双向晶闸管,具有体积小。
控制极接线简单等优点。
A.B.C 为交流输入端,A 3.B3.C3为输出端,接向异步电动机定子绕组。
为了保护晶闸管,在晶闸管两端接有阻容器吸收装置和压敏电阻。
1.2.1 控制电路速度给定指令电位器BP1所给出的电压,经运算放大器N组成的速度调节器送入移相触发电路。
同时,N还可以得到来自测速发电机的速度负反馈信号或来自电动机端电压的电压反馈信号,以构成闭环系统,提高调速系统的性能。
1.2.2 移相触发电路双向晶闸管有4种触发方式。
本系统采用负脉冲触发,即不论电源电压在正半周期还是负半周期,触发电路都输出负得触发脉冲。
负脉冲触发所需要的门极电压和电流较小,故容易保证足够大的触发功率,且触发电路简单。
TS是同步变压器,为保证触发电路在电源正负半波时都能可靠触发,又有足够的移相范围,TS采用DY11型接法。
移相触发电路采用锯齿波同步方式,可产生双脉冲并有强触发脉冲电源(+40V)经X31送到脉冲变压器的一次侧第2章 双闭环三相异步电动机调压调速系统的设计方案2.1 主电路设计2.1.1 调压电路改变加在定子上的电压是通过交流调压器实现的。
目前广泛采用的交流调压器由晶闸管等器件组成。
三相的异步电动机变频调速系统设计的及仿真

三相的异步电动机变频调速系统设计的及仿真引言:在现代工业生产中,电动机作为一种重要的动力设备,广泛应用于各种机器和设备中。
为了满足不同工艺和运行要求,需要调节电动机的运行速度。
传统的方法是通过改变电源的频率来达到调速的目的。
然而,这种方法存在一定的局限性,无法实现精确的调速效果。
因此,引入变频调速系统成为了提高电机调速性能的有效手段。
本文将对三相异步电动机变频调速系统的设计及仿真进行详细介绍。
一、系统设计:1.变频器设计:变频器是变频调速系统的核心部分,用于将输入电源的频率和电压变换成适合电动机工作的频率和电压。
变频器由整流器、滤波器和逆变器组成。
整流器将输入的交流电变换成直流电,滤波器用于平滑输出电压,逆变器将直流电转换成可控的交流电输出。
变频器还包括控制模块,用于实现调速功能。
2.控制系统设计:控制系统包括速度传感器、PID控制器和功率放大器。
速度传感器用于实时测量电机转速,PID控制器根据设定转速和实际转速之间的差异,调节变频器的输出频率和电压,以实现电机的准确调速。
二、系统仿真:为了验证设计的可行性和调速性能,可以使用MATLAB/Simulink进行系统仿真。
具体的仿真流程如下:1. 搭建电机模型:根据电机的参数和等效电路,搭建电机的MATLAB/Simulink模型,包括电机的输入端口、输出端口和机械负载。
2. 设计控制系统:在Simulink中添加速度传感器、PID控制器和功率放大器,并与电机模型连接起来。
3.设定仿真参数:设置电机的参数、控制系统的参数和仿真时间等参数。
4.进行仿真实验:根据实际需求,设置不同的转速设定值,观察电机的响应情况,如稳态误差和调速时间等。
5.优化系统性能:根据仿真结果,调整参数和控制策略,优化系统的调速性能,如减小稳态误差和调速时间。
三、结论:三相异步电动机变频调速系统是一种能够实现精确调速的调速方案。
通过合理设计和仿真验证,可以得到一个性能稳定、调速精度高的变频调速系统。
双闭环三相异步电动机调压调速系统设计
交流调速课程设计题目:双闭环三相异步电动机调压调速系统设计学院:机械工程学院班级:机检0911姓名:武锦涛(21)、周元浩(22)谢美兰(23)、张丽萍(24)指导教师:孙宏昌目录摘要 (3)引言 (3)一、方案和系统结构框图 (3)电动机的选型 (3)二、主电路设计 (4)2.1晶闸管的选择 (4)2.2晶闸管的保护环节的设计 (5)2.3 主回路熔断器、接触器、热继电器选择 (7)2. 4主回路导线规格 (7)2. 5主回路欠电压、漏电流等保护环节设计 (7)三、控制电路设计 (9)3.1 电流调节器的设计 (9)3.2转速调节器ACR的设计 (12)3.3调速系统静态参数分析 (15)3.4控制回路导线规格 (16)四、系统电路控制图 (16)五、触发电路设计 (17)晶闸管的触发电路 (17)总结 (19)参考文献 (19)摘要:调压调速是异步电动机调速系统转差率s基本不变时,电动机的电磁转矩与定子电压的平方成正比,因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电机转速的目的。
异步电动机采用调压调速时,对普通异步电动机来说其调速范围很有限,而对力矩电机或绕线式异步电动机在转子中串入适当电阻后使机械特性变软其调速范围有所扩大,当电机低速运行时,负载或电压稍有波动,就会引起转速很大的变化,运行不稳定。
除此之外,在负载或电网电压波动情况下,其转速波动也比较严重,为了提高系统的稳定性,采用双闭环调速系统,以提高调压调速特性的硬度。
关键词:双闭环调压调速系统三相异步电动机晶闸管保护电路引言:异步电动机的转速恒小于旋转磁场的转速n1,只有这样,转子绕组才能产生电磁转矩,使电动机旋转。
如果n=n1,转子绕组与定子磁场之间无相对运动,则转子绕组中无感应电动势和感应电流产生,可见n<n1是异步电动机工作的必要条件。
由于电动机转速n与旋转磁场转速n1不同步,故称为异步电动机。
改变加在定子上的电压是通过交流调压器实现的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
吉林建筑大学城建学院课程设计报告题目名称双闭环三相异步电动机调压调速系统的仿真院(系) 电气信息工程系课程名称电力拖动自动控制系统班级电气11-1学号110090121学生姓名李林指导教师柏逢明起止日期2015.3.2-2015.3.13目录摘要 (I)ABSTRACT (II)第1章双闭环三相异步电动机调压调速系统 (1)1.1设计原理 (1)1.2工作原理………………………………………………………………21.2.1 控制电路 (2)1.2.2移相触发电路 (2)第2章设计方案 (3)2.1 主电路设计 (3)2.1.1 调压电路…………………………………………………………32.1.2开环调压调速ﻩ (3)2.1.3闭环调压调速................................................42.2控制回路设计 (5)5……………………………2.2.1转速检测环节和电流检测环节的设计ﻩ2.2.2调速系统的静态参数分析 (9)2.3触发电路设计……………………………………………………………11第3章仿真设计 (12)3.1 调压电路 (12)3.1.1 调压电器的仿真模型 (12)31………………………………………………………3.1.2 参数的设定ﻩ3.1.3电阻负载的仿真图形 (14)3.2 异步电动机带风机泵类负载开环调压调速模块 (1)53.2.1参数设定……………………………………………………………153.2.2闭环调压 (18)结论 (21)致谢 (22)参考文献 (23)摘要调压调速是变转差率调速的一种。
由电机原理可知当转差率s基本保持不变时,电动机的电磁转矩与定子电压的平方成正比,因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的。
改变加在定子上的电压是通过交流调压器实现的。
目前广泛采用的交流调压器由晶闸管等器件组成。
它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间,通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压。
晶闸管三相交流调压电路的连结方式很多,各有其特点。
双闭环调压调速特性以前用饱和电抗器,现在广泛采用晶闸管调压电路。
在前面所述的开环系统的调速中,其机械特性软,调速范围较窄。
加转速负反馈系统环节后成了调压调速的闭环控制系统。
调速范围变大了。
三相异步电动机的结构主要由定子和转子两大部分组成。
测速发电机TG测得电动机转速即测速发电机的u∝n,当n↑→u↑,将u与给定电压比较得到一个电压变化值,将这个变化值作为放大器的输入端,经放大后的输出为触发器的发出信号,使触发器发出发出一定相位的脉冲,晶闸管调压器就输出一定值的电压,调节给定电压的大小就可以得到不同输出电压,从而达到调速的目的。
本文基于matlab软件进行设计仿真。
关键词:调压调速;双闭环;三相异步电动机;matlabABSTRACTThe pressureregulatingspeed isavariable slipspeed.By the principleknown asmotor slip sremained basically unchanged, theelectromagnetic torque and stator voltage of the motor is directly proportional to the PingFangcheng,therefore, stator voltagecan beartificiallydifferent mechanical properties,so as to achieve the purpose of regulating the rotation speed of the motor.Altering the voltage in thestator is realized through AC voltageregulator.Nowwidely used inAC voltageregulator iscomposed of a thyristor devices. Itis the three bidirectional thyristorsare respectivelyconnectedtothethree-phaseAC power and three-phase stator winding,the termin alvoltage by adjusting thethyristor conduction angle toadjust the size of the added to the stator winding.Thyristor three-phase AC voltageregulating circuit connected inmanyways, each with its own characteristics.Doubleclosed loop variable voltageandspeedcharacteris ticspreviouslyused saturated reactor, is now widelyused thyristor voltageregulating circuit. Speedopen-loop system describedinthe preceding, themechanical characteristics of soft,narrowspeed range. Add speed negative feedback system link sinto aclosed loopvariable voltagespeedcontrolsys tem.Larger speed range.The structureofthethree-phaseasynchronousmotor is composed oftwoparts of stator and rotor.Tachometergenera tor T G measured mo to r spe ed is n u t ach oge ne rator, relax, w hen n u u w ith th e given vol tage w ill decrea se, co mp ared to get a change of vo ltag e value , the cha nge of value as th e inp uts o f the ampli fier , the ampli fied outp ut si gnal is sued for fli p flops, make the hair o f ce rtain tr igger pul se ph ase t he r eg ul ator ou tp ut vo ltage, h av e certa in value of thy ris tor re gula tin g volta ge , g iv en the size of t he ou tpu t vol tage can be obtain ed , so as to achie ve the purp os e of speed . This pape r desig n an d sim ulati on ba sed on MA TLAB softwa re.K eyw ords : v ariable voltage speed co nt rol; doub le cl ose d-loop; three -phase asynch ron ous motor; MAT LAB第1章 双闭环三相异步电动机调压调速系统1.1设计原理对于可调速的电力拖动系统,工程上往往把它分为直流调速系统和交流调速系统两类。
所谓交流调速系统,就是以交流电动机作为电能—机械能的转换装置,并对其进行控制以产生所需要的转速。
交流异步电动机机械特性的参数表达式如下:变压调速是异步电动机调速方法中的一种,由三相异步电动机机械特性参()()⎥⎦⎤⎢⎣⎡+++=2'21'1'23lr ls r S r s L L S R R S R U T ωω数表达式可知,当异步电动机等效电路的参数不变时,在相同点的转速下,电磁转矩e T 与定子电压S U 的平方成正比,因此,改变定子外加电压就可以机械特性的函数关系,从而改变电动机在一定负载转矩下的转速。
本实验即采用定子调压调速系统,就是在恒定交流电源与交流电动机之间接入晶闸管作为交流电压控制器,即改变定子电压调速。
如下图画出了定子电压为1U 、'1U 、"1U ('"111U U U >>)时的机械特性。
图1-1 异步电动机在不同电压的机械特性由电机原理可知,当转差率s 基本保持不变时,电动机的电磁转矩与定子电压的平方成正比。
因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的。
1.2工作原理系统主电路采用3个双向晶闸管,具有体积小。
控制极接线简单等优点。
A .B.C为交流输入端,A 3.B 3.C3为输出端,接向异步电动机定子绕组。
为了保护晶闸管,在晶闸管两端接有阻容器吸收装置和压敏电阻。
1.2.1 控制电路速度给定指令电位器BP1所给出的电压,经运算放大器N组成的速度调节器送入移相触发电路。
同时,N 还可以得到来自测速发电机的速度负反馈信号或来自电动机端电压的电压反馈信号,以构成闭环系统,提高调速系统的性能。
1.2.2 移相触发电路双向晶闸管有4种触发方式。
本系统采用负脉冲触发,即不论电源电压在正半周期还是负半周期,触发电路都输出负得触发脉冲。
负脉冲触发所需要的门极电压和电流较小,故容易保证足够大的触发功率,且触发电路简单。
TS是同步变压器,为保证触发电路在电源正负半波时都能可靠触发,又有足够的移相范围,TS 采用DY11型接法。
移相触发电路采用锯齿波同步方式,可产生双脉冲并有强触发脉冲电源(+40V)经X31送到脉冲变压器的一次侧。
ﻬ第2章设计方案2.1 主电路设计2.1.1 调压电路改变加在定子上的电压是通过交流调压器实现的。
目前广泛采用的交流调压器由晶闸管等器件组成。
它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压。
这里采用三相全波星型联接的调压电路。