(完整word版)《现代控制理论》第3版课后习题答案
现代控制理论答案第三版
解:由图,令 i1
= x1 , i2 = x 2 , u c = x3 ,输出量 y = R2 x 2 x1 = − x2 = − x3 = −
• • •
R1 x1 + L1 x1 + x3 = u
有电路原理可知: L2
•
R1 1 1 x1 − x3 + u L1 L1 L1 R2 1 x2 + x3 L2 L2
−1
⎡0 ⎢b ⎢ 1 ⎢0 ⎢ ⎣0
0⎤ 0⎥ ⎥ 0⎥ ⎥ b2 ⎦ 0 0 s a4 0⎤ a6 ⎥ ⎥ − 1⎥ ⎥ a3 ⎦
−1
−1 ⎡s ⎢a s + a 1 Wuy ( s ) = C ( sI − A) −1 B = [1 0 1 0]⎢ 2 ⎢− 1 0 ⎢ a5 ⎣0
1-5 系统的动态特性由下列微分方程描述
1 0 ⎤ ⎡ p13 ⎤ ⎡ 0 ⎡ p13 ⎤ ⎢ ⎥ ⎢ ⎥ 当 λ1 = −3 时, 3 0 2 p23 = −3⎢ p23 ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢− 12 − 7 − 6⎦ ⎥⎣ ⎢ p33 ⎦ ⎥ ⎢ p33 ⎦ ⎥ ⎣ ⎣
解得:
p23 = −3 p13 , p33 = 3 p13
⎡0 ⎢b ⎢ 1 ⎢0 ⎢ ⎣0
0⎤ 0⎥ ⎥ 0⎥ ⎥ b2 ⎦
(2) y + 5 y + 7 y + 3 y = u + 3 u + 2u
列写其相应的状态空间表达式,并画出相应的模拟结构图。 解:令
. ..
K
..
.
..
.
x1 = y , x 2 = y , x 3 = y
,则有
⎡ 。⎤ 1⎥ 1 0 ⎤ ⎡ x1 ⎤ ⎡0⎤ ⎡0 ⎢x 。 ⎢ ⎥ ⎢ ⎥ ⎢x ⎥ = ⎢ 0 0 1⎥ 2 ⎥ ⎢ x 2 ⎥ + ⎢0 ⎥ u ⎢。 ⎥ ⎢ ⎢ x3 ⎥ ⎢ ⎣− 3 − 7 − 5⎥ ⎦⎢ ⎣ x3 ⎥ ⎦ ⎢ ⎣1 ⎥ ⎦ ⎢ ⎦ ⎥ ⎣ ⎡ x1 ⎤ ⎥ y = [2 3 1]⎢ ⎢ x2 ⎥ ⎢ ⎣ x3 ⎥ ⎦
现代控制理论课后习题答案Word版
绪论为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。
根据老师要求,本次任务分组化,责任到个人。
我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。
2.题解详略得当,老师要求的步骤必须写上。
3.遇到一题多解,要尽量写出多种方法。
本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。
我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。
在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三!这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。
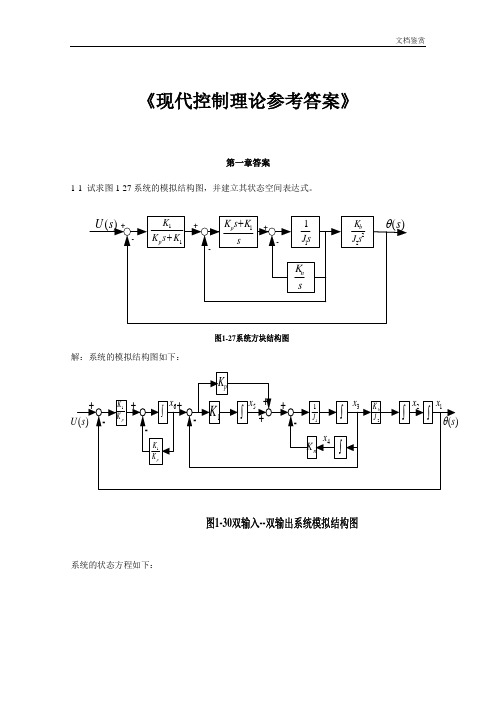
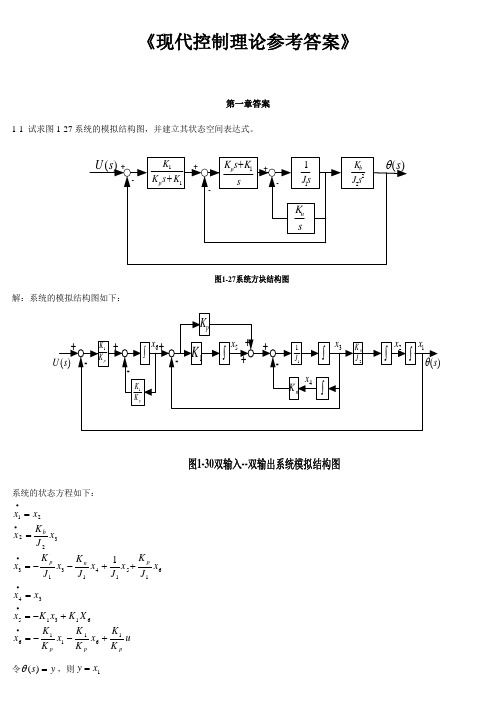
本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正!2014年6月2日第一章 控制系统的状态空间表达式1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
《现代控制理论》第3版课后习题答案.
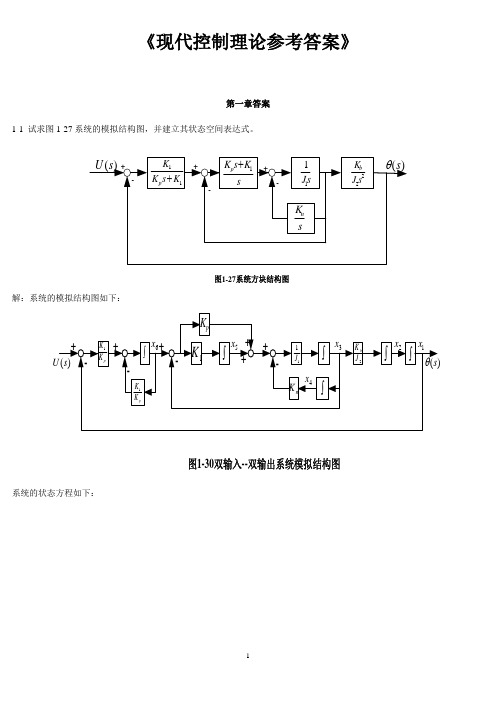
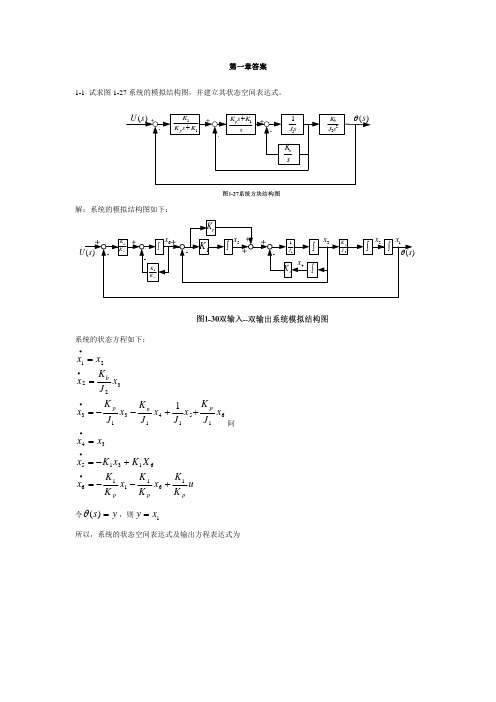
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第三版_.习题答案
K1
0 0 K1
K p
B 0 0 0 0 0
K1
T
K p
C 1 0 0 0 0 0;
1-3.
图
1-29
机械系统。M1
M
受外力
2
作用 f1 f2作用,求M1 M 2运动速度输出的
状态空间表达式。
解:微分方程 M1 y1 f1 K1(c1 c2 ) B1( y1 y2 )
M 2 y2 f2 K2c2 B2 y2 K1(c1 c2 ) B1( y1 y2 )
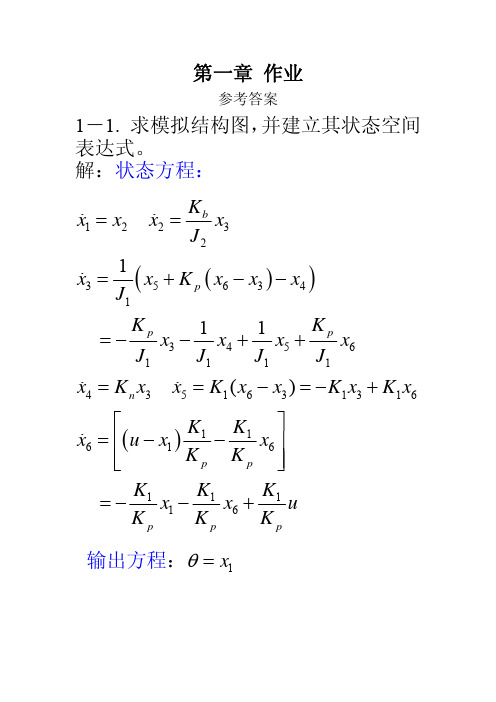
第一章 作业
参考答案
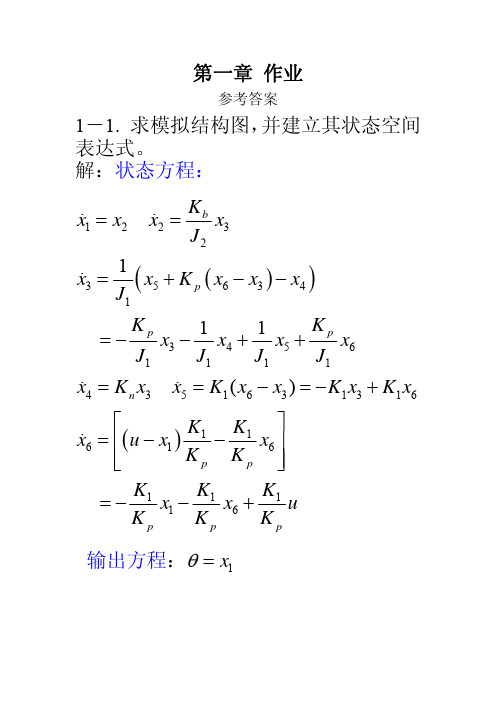
1-1. 求模拟结构图,并建立其状态空间 表达式。 解:状态方程:
x1 x2
x2
Kb J2
x3
x3
1 J1
x5 K p x6 x3 x4
Kp J1
x3
1 J1
x4
1 J1
x5
Kp J1
x6
x4 Kn x3 x5 K1(x6 x3 ) K1x3 K1x6
x 6
设状态变量 x = c1 c2 y1 y2 T
y y1 y2 T ,u f1 f2 T
令 x1 c1, x2 c2, x3 y1, x4 y2
x1 x3 x2 x4
x3
K1 M1
x1
K1 M1
x2
B1 M1
x3
B1 M1
x4
1 M1
f1
x4
K1 M2
x1
K1 K2 M2
第二章 作业
参考答案
2-4. 用三种方法计算eAt (定义法,约 当标准型,拉氏反变换,凯莱哈密顿)
(1)
A
0 4
1 0
直接法(不提倡使用,除非针对一些特
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
实用文档之《现代控制理论》第3版课后习题答案

实用文档之"《现代控制理论参考答案》"第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第3版(刘豹唐万生)课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
1u 2u 图1-30双输入--双输出系统模拟结构图解:系统的状态空间表达式如下所示:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡432121432134561243210101000000010*******x x x x y u b b x x x x a a a a a a xx x x⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-3456121010001)(a a a s a as a sA sI ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-=--211345612100000001010001)()(b b a a a s a as a sB A sI s W ux []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-=--2113456121000000010100010101)()(b b a a a s a as a sB A sIC s W uy1-5系统的动态特性由下列微分方程描述u u u y y y y 23375)2(......++=+++列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡321321321132100573100010x x x y u x x x x x x 。
相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡432143214321313310411100000020*********x x x x y u x x x x x x x x1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W )1)(2)(3()3(2)3(2+++=+++=-s s s s s s A sI()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=--)2)(1(150)3()3(2033)1)(2)(3(1)(21s s s s s s s s s s s s A sI()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=-=-)3)(12()3()3()1)(2)(3(1210)2)(1(150)3()3(2033)1)(2)(3(1)()(21s s s s s s s s s s s s s s s s s s s s B A sI s W ux[])1)(2()12()1)(2)(3(1)3)(12()3()3(100)()(1+++=+++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=-=-s s s s s s s s s s s B A sI C s W uy1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P (或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P )当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P ) 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 1,332,1==λλ当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=101201011T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-1102112101T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-4325183572131102112101B T⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=302413101201011110021CT约旦标准型x ~y ux ~x ~⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3024134325181000300131-10 已知两系统的传递函数分别为W 1(s)和W 2(s)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=2102111)(1s s s s s W ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=0114131)(2s s s s W试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++==)2)(1(1)1(1)4)(3)(2(75)3)(1(121021110114131)()()(2212s s s s s s s s s s s s s s s s s s W s W s W(2)并联联结⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++±⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=±=01141312102111)()()(11s s s s s s s s W s W s W1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=210111)(1s s s s W ⎥⎦⎤⎢⎣⎡=10012)s (W求系统的闭环传递函数 解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=2101111001210111)()(211s s s s s s s W s W ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-++=+2301121001210111)()(1s s s s s s s s I s W s W I []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++++=+-320)3(1211212331)()(121s s s s s s s s s s s s s s s W s W I[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-+++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++++=+=-310)3(1211101)1)(2(3312111112012331)()()()(1121s s s s s s s s s s s s s ss s s s s s s s s s W s W s W I s W1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=2121111s s s )s (W ⎥⎦⎤⎢⎣⎡=10012)s (W求系统的闭环传递函数 解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=212111100121211111s s s s s s )s (W )s (W⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=+232112100121211111s s s s s s s s )s (W )s (W I []⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++=+-1221232512111s s s s s s s )s (s )s (W )s (W I[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-++++++++-+++++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++-++++-++++-++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++=+=-252)25)(2(66251)25()2()83()1(1121)2(222)2(1)2(32)2(325)1(2112112212325)1()()()()(222322222221111s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s ss s s s s s s s s s s s W s W s W I s W1-12 已知差分方程为)(3)1(2)(2)1(3)2(k u k u k y k y k y ++=++++试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为 (1)⎥⎦⎤⎢⎣⎡=11b 解法1:21112332)(2+++=+++=z z z z z z W )(11)(2001)1(k u k x k x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=+ [])(11)(k x k y =解法2:)(2)(3)()(3)(2)1()()1(2121221k x k x k y u k x k x k x k x k x +=+--=+=+ [])(23)()(10)(3210)1(k x k y k u k x k x =⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=+求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡=-15041011321010111AT T [][]13101123-=⎥⎦⎤⎢⎣⎡-=CT所以,状态空间表达式为[])(13)()(11)(1504)1(k z k y k u k z k z -=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=+第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。