机械原理答案重点(课后习题)
机械原理 课后习题答案
⎛ ⎜ ⎝
m / s2 mm
⎞ ⎟ ⎠
作加速度图
C
2
3
D
B
p(d) 4
(c3)
b2 (b1) (b3)
题3-8 c) 解(续2)
[解]
(3)加速度分析 aB 2 (= aB1) → aB3 → aC 3
1) 求aB2
A 1 ω1
2) 求aB3
aB3
=
an B3D
+
at B3D
=
aB
2
+
ak B3B2
得d点
p(c3)
E
vD = μv pd = 0.005 × 44.6 = 0.223 (m / s)
作 de ⊥ bc2
并使
de = DE = lDE = 40 bd BD lBD 50
得e点
vE = μv pe = 0.005 × 32.0 = 0.16 (m / s)
3) 求ω2
ω2
=
vC 2B lBC
p' = 2p'l + p'h − 3n' = 2 × 3 + 0 − 3× 2 = 0
p' = 2p'l + p'h − 3n' = 2 ×10 + 0 − 3×6 = 2
F = 3n − (2pl + ph − p') − F' = 3 × 11 − (2 × 17 + 0 − 2) − 0 =1
P24
B P23
3
2A
P12
1
4
D
P14
vE
=
vB
P13 E P13B
《机械原理》课后习题附答案
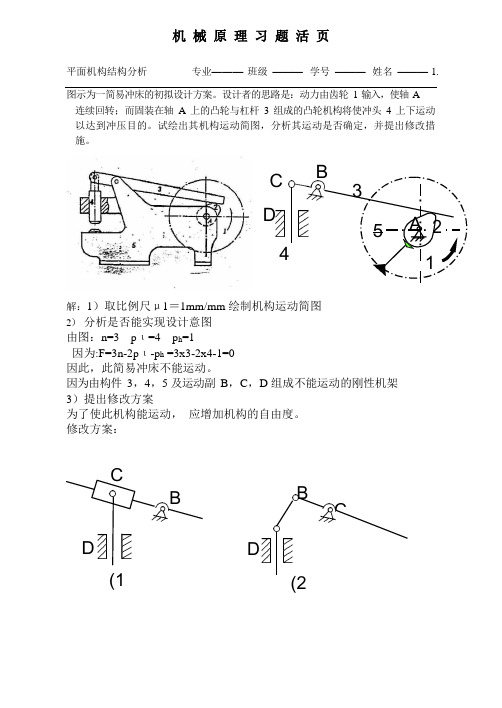
CB D BC平面机构结构分析专业———班级———学号———姓名——— 1.图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1 输入,使轴A连续回转;而固装在轴A 上的凸轮与杠杆3 组成的凸轮机构将使冲头4 上下运动以达到冲压目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
C B 35 A 24 1解:1)取比例尺μ1=1mm/mm 绘制机构运动简图2)分析是否能实现设计意图由图:n=3 pι=4 p h=1因为:F=3n-2pι-p h =3x3-2x4-1=0因此,此简易冲床不能运动。
因为由构件3,4,5 及运动副B,C,D 组成不能运动的刚性机架3)提出修改方案为了使此机构能运动,应增加机构的自由度。
修改方案:D(1 (2DG7D 64C EF9 38B 2 A122如图所示为一小型压力机。
图中齿轮 1与偏心轮 1’为同一构件,绕固定轴心 o 连续转动。
在齿轮 5上开有凸轮凹槽,摆杆 4上的滚子 6嵌在凹槽中,从而使摆杆 4 绕 C 轴上下摆动。
同时,又通过偏心轮 1’、连杆 2、滑杆 3使 C 轴上下移动。
最后通过在摆杆 4的叉槽中的滑块 7和铰链 G 使冲头 8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
b)解:计算该机构的自由度n=7, p ι=9, p h =2 F=3n-2p e -p h =3x7-2x8-2=13. 试计算下列二图所示齿轮连杆组合机构的自由度。
图中相切的圆周表示一对齿轮传动的节圆;凡局部自由度、复合铰链和虚约束均需明确指出。
解:a )解n=4 P ι=5 Ph=1F=3x4-2x5-1=134 C A复合铰链1a)BD 5b)解:n=6 Pι=7 Ph=3F=3×6-2×7-3=14.试计算下列二图所示压榨机的自由度。
图a 中,左右两半完全对称;图b 中,CD = FI = KL = KM = FJ = CE,LI =KF = MJ = JE = FC = ID。
机械原理课后习题答案(朱理)
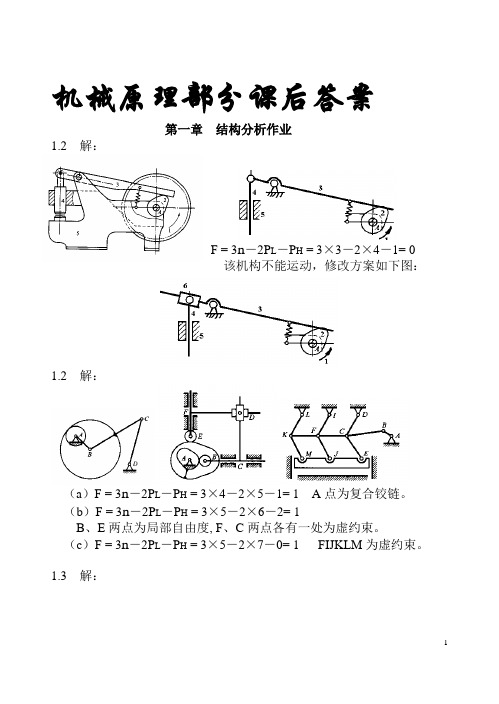
机械原理部分课后答案第一章结构分析作业1.2 解:F = 3n-2P L-P H = 3×3-2×4-1= 0该机构不能运动,修改方案如下图:1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:F = 3n-2P L-P H = 3×7-2×10-0= 11)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。
2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。
3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。
(a) (b) (c)第二章 运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s rad l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3s rad l V BC B /2.212327033===ω5. 求n B a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BC n B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mm s mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mme 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
机械原理课后习题答案部分)

第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
(完整版)机械原理课后全部习题答案

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后习题答案

机械原理课后习题答案1. 两个质量分别为m1和m2的物体,它们分别靠在光滑水平面上的两个弹簧上,两个弹簧的弹性系数分别为k1和k2。
求当两个物体分别受到的外力分别为F1和F2时,两个物体的加速度分别是多少?答,根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
根据这个公式,可以得出两个物体的加速度分别为a1=F1/m1,a2=F2/m2。
2. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,物体的加速度是多少?答,同样根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
根据这个公式,可以得出物体的加速度为a=F/m。
3. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的位移是多少?答,根据胡克定律,弹簧的位移与受到的外力成正比,即F=kx,其中x为弹簧的位移。
解出x=F/k,即弹簧的位移与外力成反比。
4. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的振动周期是多少?答,根据弹簧的振动周期公式T=2π√(m/k),可以得出弹簧的振动周期与物体的质量和弹簧的弹性系数有关,与受到的外力无关。
5. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的振幅是多少?答,根据弹簧振动的公式x=Acos(ωt+φ),可以得出弹簧的振幅与受到的外力无关,只与弹簧的弹性系数和物体的质量有关。
求当物体受到外力F时,弹簧的振动频率是多少?答,根据弹簧振动的公式f=1/2π√(k/m),可以得出弹簧的振动频率与受到的外力无关,只与弹簧的弹性系数和物体的质量有关。
7. 一个半径为r的圆盘,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当圆盘受到外力F时,圆盘的加速度是多少?答,根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
机械原理课后全部习题解答

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理答案重点(课后习题)
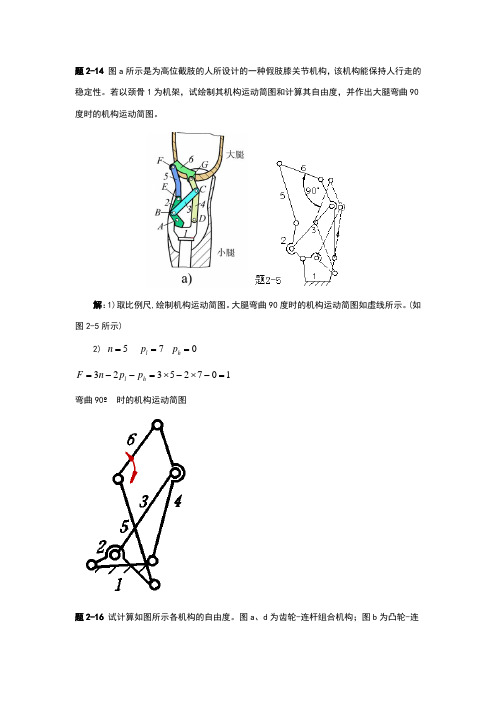
题2-14 图a 所示是为高位截肢的人所设计的一种假肢膝关节机构,该机构能保持人行走的稳定性。
若以颈骨1为机架,试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90度时的机构运动简图。
解:1)取比例尺,绘制机构运动简图。
大腿弯曲90度时的机构运动简图如虚线所示。
(如图2-5所示)2) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n F弯曲90º 时的机构运动简图题2-16 试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同为什么解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n F A 处为复合铰链b) 解法一:5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F解法二:7=n 8=l p 2=h p 虚约束0='p 局部自由度 2='F12)0282(73)2(3=--+⨯-⨯='-'-+-=F p p p n F h l 2、4处存在局部自由度c) 解法一:5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n F解法二:11=n 17=l p 0=h p虚约束263010232=⨯-+⨯='-'+'='n p p p hl 局部自由度 0='F 10)20172(113)2(3=--+⨯-⨯='-'-+-=F p p p n F h l C 、F 、K 处存在复合铰链d) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题2-14 图a 所示是为高位截肢的人所设计的一种假肢膝关节机构,该机构能保持人行走的稳定性。
若以颈骨1为机架,试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90度时的机构运动简图。
解:1)取比例尺,绘制机构运动简图。
大腿弯曲90度时的机构运动简图如虚线所示。
(如图2-5所示)
2) 5=n 7=l p 0=h p
10725323=-⨯-⨯=--=h l p p n F
弯曲90º 时的机构运动简图
题2-16 试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?
解: a) 4=n 5=l p 1=h p
11524323=-⨯-⨯=--=h l p p n F A 处为复合铰链
b) 解法一:5=n 6=l p 2=h p
12625323=-⨯-⨯=--=h l p p n F
解法二:7=n 8=l p 2=h p 虚约束0='p 局部自由度 2='F
12)0282(73)2(3=--+⨯-⨯='-'-+-=F p p p n F h l 2、4处存在局部自由度
c) 解法一:5=n 7=l p 0=h p
10725323=-⨯-⨯=--=h l p p n F
解法二:11=n 17=l p 0=h p
虚约束263010232=⨯-+⨯='-'+'='n p p p h
l 局部自由度 0='F 10)20172(113)2(3=--+⨯-⨯='-'-+-=F p p p n F h l C 、F 、K 处存在复合铰链
d) 6=n 7=l p 3=h p
13726323=-⨯-⨯=--=h l p p n F
齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1
个约束。
齿条7与齿轮5的啮合为高副(因中心距未被约束,故应为双侧接触)将提供2个约束。
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上)
(a)
(b)
答:
答:
(10分)
(d)
(10分)
3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
答:1)瞬新的数目:
K=N(N-1)/2=6(6-1)/2=15
2)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置
3)
ω1/ω3= P 36P 13/P 16P 13=DK/AK
由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。
3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求:
1)当φ=165°时,点的速度vc ;
2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小;
3)当V C =0时,φ角之值(有两个解)。
解:1)以选定的比例尺μ机械运动简图(图b )
2)求vc 定出瞬心p12的位置(图b ) 因p 13为构件3的绝对瞬心,则有
ω3=v B /lBp 13=ω2l AB /μl .Bp 13=10×0.06/0.003×78=2.56(rad/s)
v c =μc p 13ω3=0.003×52×2.56=0.4(m/s)
3)定出构件3的BC 线上速度最小的点E 的位置,因BC 线上速度最小的点必与p13点的距离
最近,故丛p13引BC 线的垂线交于点E ,由图可得
v E =μl.p 13E ω3=0.003×46.5×2.56=0.357(m/s)
(2分)
(3分)
4)定出vc=0时机构的两个位置(图c )量出
φ1=26.4°
φ2=226.6°
题5-8
解:此题是判断机构的自锁条件,因为该机构简单,故可选用多种方法进行求解。
解法一:根据反行程时0≤'η的条件来确定。
反行程时(楔块3退出)取楔块3为分离体,其受工件1、1′和夹具2作用的总反力F R13和F R23以及支持力F ′。
各力方向如图5-5(a )、(b)所示 ,根据楔块3的平衡条件,作力矢量三角形如图5-5(c )所示 。
由正弦定理可得 ()φαφ
2sin cos 23-'=F F R 当0=φ时,αsin 230F F R '=
于是此机构反行程的效率为 ()α
φαηsin 2sin 32320-=='R R F F 令0≤'η,可得自锁条件为:φα2≤ 。
2
1
3F R23
F R13F'v 31α
φφ
F R23F R13
F'
αφ
φF R23F 图5-8(a)
(b)(c)
α-2φ90°+φ
解法二:根据反行程时生产阻力小于或等于零的条件来确定。
根据楔块3的力矢量三角形如图5-5(c ),由正弦定理可得
()φφαcos 2sin 23-='R F F 若楔块不自动松脱,则应使0≤'F 即得自锁条件为:φα2≤ 解法三:根据运动副的自锁条件来确定。
由于工件被夹紧后F ′力就被撤消,故楔块3的受力如图5-5(b)所示,楔块3就如同受到F R23(此时为驱动力)作用而沿水平面移动的滑块。
故只要F R23作用在摩擦角φ之内,楔块3即发生自锁。
即 φφα≤- ,由此可得自锁条件为:φα2≤ 。
讨论:本题的关键是要弄清反行程时F R23为驱动力。
用三种方法来解,可以了解求解这类问题的不同途径。
8-6如图所示,设己知四杆机构各构件的长度为240a mm =,600b =mm ,400,500c mm d mm ==。
试问:
1)当取杆4为机架时,是否有曲柄存在?
2)若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?
3)若a 、b ﹑c 三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d 的取值范围为何值? : 解 (1)因a+b=240+600=840≤900=400+500=c+d 且最短杆 1为连架轩.故当取杆4为机架时,有曲柄存在。
(2)、能。
要使此此机构成为双曲柄机构,则应取1杆为机架;两使此机构成为双摇杆机构,则应取杆3为机架。
(3)要获得曲柄摇杆机构, d 的取值范围应为440~760mm 。
8-7图示为一偏置曲柄滑块机构,试求杆AB 为曲柄的条件。
若偏距e=0,则杆AB 为曲柄的条件是什么?
解 (1)如果杆AB 能通过其垂直于滑块导路的两位置时,则转动副A 为周转副,故杆AB
为曲柄的条件是AB+e ≤BC 。
(2)若偏距e=0, 则杆AB 为曲柄的条件是AB≤BC
9—7 试标出题9—6a 图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90º后推杆的位移;并标出题9—6b 图推杆从图示位置升高位移s 时,凸轮的转角和凸轮机构的压力角。
解 如图 (a)所示,用直线连接圆盘凸轮圆心A 和滚子中心B ,则直线AB 与推杆导路之间所夹的锐角为图示位置时凸轮机构的压力角。
以A 为圆心, AB 为半径作圆, 得凸轮的理论廓线圆。
连接A 与凸轮的转动中心O 并延长,交于凸轮的理论廓线于C 点。
以O 为圆心.以OC 为半径作圆得凸轮的基圆。
以O 为圆心, 以O 点到推杆导路的距离OD 为半径作圆得推杆的偏距圆;。
延长推杆导路线交基圆于G-点,以直线连接OG 。
过O 点作OG 的垂线,交基圆于E 点。
过E
点在偏距圆的下侧作切线.切点为H点.交理论廓线于F点,则线段EF的长即为凸轮从图示位置转过90后推杆的位移s。
方法同前,在图(b)中分别作出凸轮的理论廓线、基圆、推杆的偏距圆。
延长推杆导路线交基圆于G点,以直线连接OG。
以O为圆心,以滚子中心升高s 后滚子的转动中心K到O点的距离OK为半径作圆弧,交理论廓线于F点。
过F点作偏距圆的切线,交基圆于E点,切点为H。
则∠GO E为推杆从图示位置升高位移s时-凸轮的转角,∠AFH为此时凸轮机构的压力角。
(a) (b)
9—8在图示凸轮机构中,圆弧底摆动推杆与凸轮在B点接触。
当凸轮从图示位置逆时针转过90。
时,试用图解法标出:
1)推杆在凸轮上的接触点;
2)摆杆位移角的大小;
3)凸轮机构的压力角。
解如图所示,以O为圆心,以O点到推杆转动中心A的距离AO为半径作圆,得推杆转动中心反转位置圆。
过O点怍OA的垂线,交推杆转动中心反转位置圆于D点。
以O`为圆心.以O`点到推杆圆弧圆心C的距离CO’为半径作圆.得凸轮的理论廓线。
以O为圆心,作圆内切于凸轮的理论廓线圆,得凸轮的基圆。
以D为圆心,以AC为半径作圆弧,交凸轮的理论廓线于E点,交凸轮的圆于G点。
用直线连接EO’,交凸轮的实际廓线于F点,此即为推杆在凸轮上的接触点;而∠GDE即为摆杆的位移角;过E点并垂直于DE的直线与直线EF间所夹
的锐角即为此时凸轮机构的压力角。