【doc】硬件在环仿真在汽车控制系统开发中的应用
汽车电子电器硬件在环仿真实验系统的研究
汽 车 电子 电器硬 件在环 仿真实 验 系统 的 研究
曹和平 鄢兵 艳 江西洪州职业学院
摘要: 现在 的汽车让驾驶 者享受着便捷 的超控 、 更加轻松地 驾驶 。 这 主要得益于汽车电 子 电器硬件 变得更加智 能。 但是汽车电子 电器的智 能 化发展 , 让汽车的控制 系统更得越 来越 复杂, - t r _  ̄ . ' - a i 进 行各方 面的测试 变得更为重 要。 利 用环仿真 实试验 系统 对汽车电子电器进行检 测是一 项值
让 汽 车 电子 电 器 变 得 种 类 繁 多 、 结 构复 杂。 在这 种情 况下, 利 表 一 种 汽 车 的 工 况 , 对 汽车 的主要数 据 , 如 起动 机 、 发动 机 、 用 环 仿 真 实 验 系 统 对 汽 车 电子 电 器 进 行 检 测 越 来 越 受 到 汽 车 变 速 器 、 车轮 等都有一整套 的数 据库 。 硬 件 接 口在 将 这 些 数 据
厂家的重 视和欢 迎 。 1环 仿 真 实 验 系 统 的优 势
模 型 输 入 到 电子 电 器 上 后 , 又 将 电子 电 器 在 不 同模 型 状 态 下 的
反映采 集传输 回软件, 电 脑 在 计 算 后 给 出一 个 控 制 变 量 , 就会
带 来 电子 电 器 的 下一 步操 作 。
得 深 入 研 究的 课 题 。
关键 调 : 汽车电子 电器硬件
环 仿真 实验 系统
研 究
随 着 现 在硬 件 和 软 件 技 术 水 平 的 提 升 , 汽 车 电子 电器 技 术 矩 阵 实 验 室 软 件 进 行 连 接 后 , 能 够 通 过 软 件 来 代 替 传 导 汽 车 让 汽 车 的 很 多功 能 实 现 智 能 化 的 集 成 操 控 。 但 是 功 能 的 集 成 电子 电 器 在 正 常 行 驶 中 的 各 种 数 据 模 型 。 每 种 数 据 模 型 都 代
硬件在环仿真在汽车控制系统开发中的应用及关键技术
:
。 。
ll
l
( 大连理工大学 内燃机研究所, 辽宁 大连 1 o4 1 2) 6
l l_ ¨ - l 1 _ m
摘要 : 介绍硬件 在环仿真的概 念 、 系统组成和工作过程 以及在 汽车控制系统开发 中的应用实例 , 重点 阐述 了硬件在
维普资讯
第5 期
20 06年 1 O月
内 燃 机
Itr a o u t n E gn s ne n lC mb s o n i e i
No. 5
O t2 ( c . 0) 6
l硬件崔环仿真在汽车控髓暴缭拜凝 l
串的瘟蔫 及 关键接 “
Ab t a t I i p p r h o c p , y tm o o ig a d w r ig p o e so r wae— i sr c :n t s a e ,te c n e t s s h e c mp s n ok n rc s fHa d r n n—te— lo i l t n a e it — h o p S muai r nr o o
iutt . dte e cnl e ad a —i —t —l pSm ao pi t n l pt m hs nop sn. h c l sa d a yeh o g s f rw e n h o i u tna l ao e u e paio r et T e at l re n h k t o i oH r e l i p ci a s t e f s
基于硬件在环仿真的汽车制动控制器测试系统
1 制 动 控 制 H L 测试 系统 简 介 Is
H L 技 术在 制动控 制仿 真测试 中的应 用 主要 Is 包括控 制策 略 开 发 、 速 性 能 评 估 和 故 障模 拟 与 快
用 广泛 并为 消费 者所熟 知 的功 能如动 防 抱 死 系 统 ( B ) 电子 稳 定 控 E D) 制 AS和
制 器仿 真测 试 系统 。该 系 统 可 快 速 、 确地 进 行 电子 制 动 控 制 器 的 功 能 测 试 和 性 能 评 估 , 准 以及 故 障 在 线 模 拟 和 诊 断 。有 助 于在 产 品开 发 过 程 中及 时 发 现 设 计 缺 陷 和潜 在 问 题 , 指 导 实 车 测 试 , 一 步 提 高 产 品 的安 全 性 和 并 进 可 靠性 , 短 开 发 周 期 。 缩
的快速 测试 ; 相对 于虚 拟 仿 真 , 采 用 实 际物理 元 它
件 替代 系统模 型 中对测 试 精 度 和实 时性 影 响较 大
的关键 部件 , 以及 难 以准 确模 型化 的黑 匣 子部 件 , 从 而大 大提 高仿 真测试 的准 确性 ¨ 。
车 辆制 动控 制 器 属 于 底 盘 电 子 系 统 , 目前 应
【 src】 T ebaigcnrlret gss m bsdo ad aei lo m ltnietb Abtat h rkn ot l sn t ae nhrw r n ops uai s . oe t i y e i o s a
1s e a e n d PACE r a -i i l t n y tm n ri RT v h ce d n mi ot r . Th ih d b s d o S e ltme smu ai s se a d Ca sm e il y a c s fwa e o e f n t n ts n e f r n e e au t n o he ee ti r kig c nr le n al r n i e smu ain u c i e ta d p ro ma c v l ai ft l crc b a n o tolr a d fiu e o ln i lto o o a d d a n ssc n b are u u c l nd a c r t l I c n h l ofn e in d fc sa d p t n il n i g o i a e c rid o tq i ky a c u aey. t a ep t d d sg e e t n oe ta i p o l ms i h r c s fd v lp e t nd t n tu tv hil e tn o i r v t a ey a d r l — r b e n t e p o e so e e o m n ,a o isr c e c e tsi g t mp o e iss ft n e i a b l y a d t e u e t e de eo me tc c e ii n o r d c h v l p n y l . t
汽车稳定性控制系统硬件在环仿真试验台毕业设计
摘要汽车稳定性控制系统通过控制驱动轮滑转状态改善车辆在软弱附着路面的牵引性和操纵稳定性,汽车电控系统开发的实质是进行车辆控制原型及执行器间的性能匹配,但单纯计算机仿真难以完成这一任务。
随着相关技术的成熟,硬件在环仿真以其开发周期短、成本低和接近实际情况正成为汽车电控系统开发的主要研究手段。
本文主要研究利用LabVIEW软件模拟捷达车的稳定性控制系统中的控制器,通过用LabVIEW软件的编程和控制算法来实现对车轮的制动压力的分配以及完成对控制器硬件的检测任务。
试验台主要是把计算机和硬件,如:传感器,执行器连接到一起,形成一个完整的汽车稳定性控制系统。
基于LabVIEW软件平台建立了车辆驱动稳定性控制硬件在环仿真平台,通过该平台进行了控制器硬件在环仿真实验。
实验结果表明了控制器能够稳定工作,控制算法可以有效控制驱动轮的滑转,显著改善车辆的起步加速性能,为实车试验以及电控单元的进一步开发打下了基础。
关键词:稳定性;策略;仿真;侧偏角;横摆角速度ABSTRACTVehicle stability control system to switch the state by controlling the drive roller in the weak attachment to improve vehicle traction and road handling and stability, development of automotive electronic control system is essentially a prototype of the vehicle control and performance matching between the actuator, but the simple computer simulation is difficult to To accomplish this task. With the maturity of relevant technologies, hardware in loop simulation in its development cycle is short, low cost and close to the actual situation is the development of automotive electronic control system, the main research tool.This paper studies the use LabVIEW software to simulate the Jetta cars stability control system controller, through the use of LabVIEW software, programming and control algorithms to realize the wheel brake pressure distribution and the completion of the controller hardware detection task. Test stand is mainly to computers and hardware, such as: sensors, actuators connected together to form a complete vehicle stability control system.LabVIEW software platform based on the establishment of a vehicle driving stability control hardware in the loop simulation platform, through the platform of the controller hardware in the loop simulation. The results Biaoming the controller stability, control algorithm Keyiyouxiao driving wheel of the slip control significantly improve the Ju Liang's start Jiasuxingneng, for the Shi vehicle testing and electrical units and lay the foundation of Jin Yibu development.Keywords:Stability; Strategy; Simulation; Slip Angle; Yaw Rate目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 概述 (1)1.2 汽车稳定性控制系统硬件在环仿真试验台的国内外研究现状 (1)1.2.1国外研究现状 (1)1.2.2国内研究现状 (2)1.3 研究汽车稳定性控制系统硬件在环仿真实验台的目的和意义 (3)1.4汽车稳定性控制系统硬件在环仿真试验台的核心问题及研究热点 (4)1.5 汽车稳定性控制系统硬件在环仿真试验台的发展前景 (4)第2章试验台的组成和原理及控制策略 (6)2.1 汽车稳定性控制硬件在环仿真试验台的组成 (6)2.2 汽车稳定性控制系统的理论基础与工作原理 (6)2.2.1 汽车稳定性控制系统的理论基础 (6)2.2.2 汽车稳定性控制系统的工作原理 (7)2.3 汽车稳定性控制系统的控制策略 (7)2.3.1 过度转向时的控制措施 (7)2.3.2不足转向时的控制措施 (8)2.4 本章小结 (8)第3章汽车稳定性控制系统的控制算法 (9)3.1 汽车失稳的原因 (9)3.2 横摆角速度对汽车稳定性的影响 (9)3.3 推导理想二自由度的汽车模型 (10)3.4 车辆稳定性控制理想目标的确定 (12)3.4.1 理想横摆角速度的计算 (12)3.4.2 理想质心侧偏角的计算 (12)3.5控制算法 (14)3.6 本章小结 (14)第4章汽车稳定性控制系统硬件在环仿真试验台硬件设计 (15)4.1硬件系统 (15)4.1.1 计算机 (15)4.1.2传感器及执行器 (16)4.1.3 采集卡 (18)4.2 本章小结 (20)第5章ESP硬件在环仿真试验台软件设计 (21)5.1 LabVIEW软件介绍 (21)5.1.1软件简介 (21)5.1.2主要特点 (21)5.2 ESP系统软件设计 (26)5.2.1 系统软件框图 (26)5.3本章小结 (26)第6章汽车稳定性控制系统仿真分析 (27)6.1 ESP系统仿真试验台 (27)6.2捷达汽车动力学模型的基本参数 (27)6.3汽车稳定性控制系统控制算法的验证 (28)6.4 进行仿真试验 (28)6.5 仿真结果 (31)结论 (32)参考文献 (34)致谢 (35)附录A 外文文献 (36)附录B 外文文献的中文译文 (42)第1章绪论1.1 概述汽车电子稳定程序控制系统又称为汽车稳定性控制系统,英文缩写为ESP(Electronic Stability Progrom),但车型不同,其缩写有所不同。
硬件在环技术在汽车上的应用研究
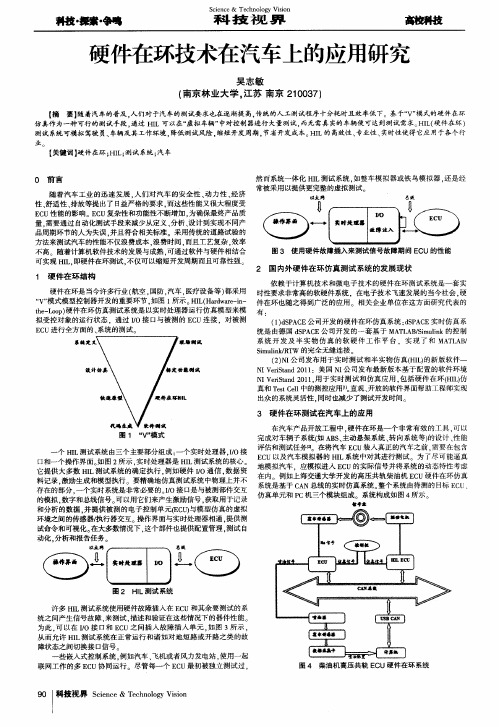
在汽车产品开放工程 中. 硬件在环是 一个 非常有效的工具 , 可以 完成对车辆子系统 口A B S 、 主动悬架系统 、 转 向系统等) 的设计 、 性能 评估和测试任务[ 2 1 在将汽车 E C U装入真正的汽车之前 , 需要 在包含 E C U以及汽车模拟器 的 H I L系统 中对其进行测试 。为 了尽可 能逼真 地模拟汽车 .应模拟进入 E C U的实际信号并将系统的动态特性考虑 在内 例如上海交通大学开发 的高压共轨柴油机 E C U硬件在环仿真 系统是基于 C AN总线的实 时仿真系统。 整个系统由待测 的 目标 E C U、 仿 真单元和 P C机三个模块组成 。系统构成如 图 4所示。
● t●
④
。
许多 H I L 测试 系统使用硬件故障插 入在 E C U和其余要测试 的系 统之 间产生信号故障 . 来测试 . 描述和验证在这些情况下 的器件性能 。 为此 . 可 以在 I / O接 口和 E C U之 间插入故 障插 入单元 , 如图 3所示 , 从而允许 H I L测试 系统在正常运行和诸 如对 地短路或开路之类 的故 障状态之间切换接 口信号 些嵌入式控制系统 . 例如汽车、 飞机或者风力发电站 , 使用一起 联网工作的多 E C U协同运行 。尽管每一个 E C U最初被独 立测试 过 ,
④
图 3 使用硬件故障插入来测试信号故障期间 E C U的性能
2 国 内外硬 件在 环 仿 真 测试 系统 的 发 展现 状
依赖于计算机技术和微 电子技术 的硬件在环测试系统是一套 实 硬件在环是当今许 多行业 ( 航空 , 国防 , 汽车 , 医疗设备等 ) 都采用 时性要求非常高的软硬件系统 .在电子技术飞速发展的当今社会 . 硬 “ v” 模式模 型控制器开发的重要环节 . 如图 i 所示 。 H I L ( Ha r d w a r e — i n — 件在环也 随之得到广泛 的应用 相 关企业单位在这方面研究代表 的 t h e 一 p ) 硬件在环仿真测试系统是 以实时处理器运行仿真模型来模 有 : 拟受控对象的运行状态 .通 过 I / 0接 口与被测的 E C U连接 .对被测 ( 1 ) d S P AC E公司开发的硬件在环仿真系统 : d S P A C E实时仿 真系 E C U进 行 全 方 面 的 、 系 统 的 测试 。 统是由德 国 d S P A C E公司开发 的一 套基于 MA T L A B / S i mu l i n k的控制 系统 开 发及 半实 物 仿 真 的软硬 件 工作 平 台 ,实 现 了和 M A T L A B / j I境定
基于dSPACE硬件在环仿真的纯电动汽车整车控制器开发

能 需 求 及 控 制 策 略 ;未 建 立 良好 的 软 硬 件 平 台 等 。本课 题 期 望 基 于车 辆行 驶 性 、安 全 性 、舒 适 性 、等 多种 性能 的考虑 ,评审 并 制订 V U的控制 C 策略 ,将 VC U各 控 制单 元进 行 模块 化 设计 ,结合 硬件在 环仿 真实 验 ,满 足 电动汽 车基本 性能 指标 。 本 文仅 以某公 司新 上市 某款 纯 电动 轿 车作 为
整 车控 制 的功 能 ,各 分布 式 控 制器 向整 车控 制 网
级 电容控制 器 以实现 车辆各 种工 作模式 。 V U是 电动 汽 车 的核 心 控制 单 元 ,它采集 加 C
络 做 出 回馈 。高 效 性 能 、低 廉 成本 及 高 可靠 性 是
国家 “ 6 ”节能与新能源汽车重大资助项 目 ( 83 编号 :2 0 A 1 3 ) 0 8 A1A19
收 稿 日期 :2 1 0 2—0 2—2 2
自动化
—
—
机械 连接
( )外 嗣芯 片选 用 :多 采川 2
一业 级 ( 4 ℃ ~+ 5 )模 数 转 L 一0 8 换 片选 用 A 5 2 , 实 时 时 钟 D 63 芯 片 选 用 D 19 ,逻 辑 门 芯 片 S30 选 择 N P公 司 的 产 品 ,隔 离 电 X
中 图 分类 号 :U 8 3 42 文 献 标 识 码 :A 文章 编 号 : 10 0 9—9 9 2 1) 8—0 0 一O 4 2(0 2 0 01 6
一一一 一一一 ~一 一一 一 ~一~ 一 ~一 一一~ e 一一 ~ 一 ~~ 一一~ 一
控 制 器硬 件 设计 需 要 考 虑 的几 个重 要 指 标1 目 3J -。 4 前 我 国 电动 汽 车 整 车控 制器 还 无 法全 面 满 足 电动 汽 车 的行 驶 要求 ,主要 表现 在 :未解 决 完 整 的功
车用电机硬件在环实时仿真与测试平台

车用电机硬件在环实时仿真与测试平台高瑾;黄洋;宋石阳;姜淑影;黄苏融【摘要】车用内置式永磁电机功率密度高,参数非线性变化显著.针对此情况,本文在高速FPGA芯片上建立车用永磁电机的非线性模型,与真实控制器连接,构建了硬件在环半实物实时仿真与测试平台(HIL-bench).利用两台产品级车用永磁电机组成共直流母线互馈对拖平台(M/G-bench),与所构建的实时仿真测试平台进行对比.测试转速范围从恒转矩区到弱磁区,测试转矩从轻载到额定负载.对比结果表明,在高速指标方面,HIL-bench系统仿真步长已达到1μs;在逼近现实工况指标方面,两个平台的平均误差为4.15%.【期刊名称】《电工技术学报》【年(卷),期】2014(029)011【总页数】8页(P99-106)【关键词】车用永磁电机;硬件在环;非线性;对拖【作者】高瑾;黄洋;宋石阳;姜淑影;黄苏融【作者单位】上海大学机电工程与自动化学院上海 200072;上海大学机电工程与自动化学院上海 200072;上海大学机电工程与自动化学院上海 200072;上海大学机电工程与自动化学院上海 200072;上海大学机电工程与自动化学院上海200072【正文语种】中文【中图分类】TM3151 引言内置式永磁同步电机(IPMSM)在当前电动汽车驱动中的应用是比较广泛的[1,2]。
IPMSM 的参数非线性变化是影响其性能的一个重要原因,电流[3]、温度[4,5]等因素对参数的非线性都有不同程度的影响,且随着转速的增加,这种非线性的变化更加明显。
为了提高仿真的可信度,取得逼近现实的仿真结果,上述非线性问题在建模时应予以考虑,这无疑增大了建模的复杂性。
半实物实时仿真技术已广泛应用于无人机自动测试跟踪[6]、飞行器姿态控制[7]及飞船太空舱的水平和垂直自由度的控制[8]等航空领域,它是将系统的一部分用仿真模型来等效,保留了另一部分实物,两者连接后实时运行。
半实物实时仿真目前分为两大类:快速控制原型(Rapid Control Prototype,RCP)与硬件在环(Hardware-in-Loop,HIL)。
硬件在环仿真的汽车制动控制器测试系统

硬件在环仿真的汽车制动控制器测试系统摘要:伴随着我国经济发展,我国汽车产业也在不断的创新与发展,与此相关的车辆电子控制系统技术也在迅速的成长和发展。
为此,我们也在寻找一个相对准确,快速便捷的测试系统。
硬件在环仿真(HILS)的技术也就此而生,对我国汽车制动控制系统的测试起到了极大的帮助。
关键词:汽车产业;硬件在环仿真;制动控制;测试系统1 引言随着电子信息技术的日渐发展,我们已经不满足与传统的实车道路测试,转而寻找一种新型的,准确的实验方法,希望能够取代传统的测试方法。
而硬件在环仿真(HILS)技术的诞生,恰恰满足了我们对新型测试技术的需求。
不同于传统实车道路测试,硬件在环仿真(HILS)技术运用仿真技术模拟实际的工作环境,它可以不受时间限制和环境限制,按照特定的指令,进行有目的的可控可循环的测试。
2 硬件在环仿真技术的作用原有系统中的测试精确度,和对影响测试环境的部件,黑匣子部件的测试准确度都远远不及硬件在环仿真(HILS)技术。
硬件在环仿真(HILS)技术运用采用物理元件的代替原有测试系统部件,仿真测试可以大大提高测试的准确度。
车辆制动控制系统隶属于车辆底盘的电子系统,就目前而言,大众常常较为熟悉的是制动防抱死系统(ABS),电子制动力分配(EBD)以及电子稳定控制系统(ESC)等。
硬件在环仿真(HILS)技术已经成为产品生产重要的辅助技术,如在包含两个季节的实际车辆测试,受着气候影响和多种道路等多重影响下的制动防抱死系统(ABS)中;在难度大,时间长的牵引控制能力,影响车辆速度等方面的电子稳定控制系统(ESC)中等。
除此之外硬件在环仿真(HILS)技术还有辅助上坡起步作用,紧急制动作用等延展性的辅助作用,硬件在环仿真(HILS)技术只会越来越丰富多彩,以生产方满足对产品生产的技术需求,使硬件在环仿真(HILS)技术成为重要的生产基础和不断的发展。
3 汽车制动系统的硬件在环仿真(HILS)的测试系统简介制动控制在环仿真(HILS)测试系统主要包括了故障模拟与诊断、快速性能评估和控制策略开发,这几个方面主要由以下四个方面组成:(1)上机位(2)制动控制器(3)DSPACE仿真器(4)测试台架辅助设备制动控制在环仿真(HILS)系统如图一所示:图一制动控制在环仿真(HILS)测试系统原理图3.1 上机位车辆模型的构造会大量运用到上机位,比如以下几点:(1)输出输入的控制(2)动态地显示(3)数据的采集(4)仿真测试的结果(5)数据的储存(6)后台的处理分析MSC公司专门设计了CARSIM软件,是多种车辆的仿真处理工具,CARSIM软件可以和MATLAB/SIMULINK等软件进行连接,通过RT FOR DSPACE扩展模块,建立车辆动态仿真运动,可以使车辆的物理元件与控制台进行数据的传输与互动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
硬件在环仿真在汽车控制系统开发中的应用].\'谢十.计算.研究'硬件在环仿真在汽车控制系统开发中的应用清华大学朱辉北京轻型汽车有限公司面北京理工大学程昌圻6争【Abstract]The}1ardware—in—the一1o0psimdationtechnicsmaybeadopindevdopmentofamamo~h~mtrol systemtotthesoftwareandha|doftheamtrolsystem.Thehardware—in—the—lov9simulationisalsoclassifiedandseveraXt)tpjapplicat[ortexamplesofthehm-dwat-e—in—the—l∞psimulation81"egivninthe..uofdevelopmtmt.ftheautomobilecontrolsystem.【摘要】在汽车控制系统开发中.采用硬件在环仿真技术可以对控制系统软硬件进行测试.对硬件在环仿真进行了分类,给出了汽车控制系统开发过程中硬件在环仿真几种典型应用实例. Topicwords:Simulation-Controlsystem.概述主题电等毳控制输入输出汽车是一个高度复杂的系统,对该系统进行综台控制已成为技术发展的必然趋势.采用动态仿真和硬件在环仿真技术可提高重复设计的效率.纯软件动态仿真是优化系统设计的最佳方案.设计者可以通过改变控制系统参数来观察系统性能的变化.模型实时执行实现了硬件在环仿真.通过将系统中关键硬件与复杂的仿真模型集成,可进行各种测试和性能评估.纯软件的动态仿真和硬件在环仿真技术的结台是传统工程试验方法的重大发展.硬件在环仿真是指被仿真环节中存在实物硬件的实时动态仿真技术,与一般动态仿真的区别是: a.硬件在环仿真模型的时间标尺t相等,需要采用实时仿真算法,而动态仿真则不用.b.硬件在环仿真对硬件系统性能要求高,需要有信号输入,输出接口.而动态仿真则不用.硬件在环仿真的主要类型是控制系统硬件在环仿真,如发动机电子控制单元硬件在环仿真是以发动机为计算模型,电子控制单元为实物;防抱死电子控制单元硬件在环仿真是以防抱死系统中的液力执行机构为计算模型.电子控制单元为实物.蚰年代初,发动机控制单元(简称ECU)基本上采用8位微处理器.只能控制发动机空燃比,点火正时等发动机最基本的参数L1J.到9O年代.已开始使用多个32位微处理器进行动力和传动系统控制,控制器不仅要执行更加复杂的控制算法.而且要同时进行多个系统的综合控制.控制软件不仅要进行数据输入,输出测试,还要进行信息输入输出的测试及1998年第l2期信号的类型和正时关系比较复杂,信号发生器的信号源不能满足要求.而在实际被控对象上进行测试存在费用高,时间长,条件不确定等因素.随着计算机技术的发展,开始使用硬件在环仿真技术进行控制系统软硬件的开发和测试L4J.由于采用现代化软件工程方法.使ECU硬件在环仿真技术的应用渗透到ECU软件开发的各个阶段.ECU硬件在环仿真系统成为ECU开发过程中的主要开发工具之一. 图1是以发动机电子控制单元为例对ECU开发过程及其各阶段所用工具的简单概括.ECU开发在不同的设计阶段需要不同形式的仿真.在控制系统原理性设计阶段.为了减少仿真费用与难度,可以进行非实时性全数字动态仿真【5l6J.由图1可见,在ECU使用之前必须进行台架试验和整车试验,以获取标定数据和对系统软硬件进行最后确认.进行ECU硬件在环仿真可以降低试验费用,缩短ECU开发周期.ECU硬件在环仿真的作用有以下几点:a.进行ECU软硬件测试和验证.b.提供试验系统实时监测数据.监控试验对象,执行器,传感器等的动态特性.e.可以进行在实际中不可能或不易进行的试验,如故障模拟,故障诊断软件测试及紧急状况的处理等.d.可以研究不同控制算法对控制器品质的影响.设计?计算?研究开始发动机,传动系,控制系统夸数字仿真控制系统原型开发ECU硬件在环实时仿真卜学摸1=—=:塑笙!I—1兰三竺竺h巫环仿真系统lL二.二=二二二1.台架试验获得ECUlI1.发动机台架试I卜一所需发动机优化数据I--I验用控制系统H第四阶段2.ECU台架试睦Il2.DcU开发系统I求I图1ECU开发过程及所用开发工具e.试验重复性好.可以分别研究每个参数变化对性能的影响.图2为硬件在环仿真的构成形式.ECU为实物.发动机,驱动系,传感器,执行器等为模型,主要用于ECU的开发与测试.可以将部分或全部执行器以实物的形式参与仿真,用于研究传感器,执行器的实际性能对系统整体性能的影响以及测试信号处理电路与执行器驱动电路的动态特性.图2硬件在环仿真的构成2应用实例2.1测试汽油机的ECU系统德国勃朗施威格工业大学电子测量技术和基础电子技术学院的威施明(U.Varchmin)教授等人开发了汽车信号发生器(简称M0SIG),90年代第一次发表文章_7J简要介绍了MOSIG的功能及其硬件结构,M0SIG即可以与PC机通过RS一232串行通讯口联机使用,也可独立使用.其CPU是l6位的M一96系列单片机.1994年在MTZ上发表文章L8J再一次介绍MOSIG,MOSIG的硬件结构没变, 只是增加了PC机上软件的功能.其发动机模型是基于三维特性图的准线性模型,通过查表与插值来计算发动机输出参数,并且在PC机上可以利用数学表达式来产生所需要的信号形式.2.2测试柴油机的ECu系统北京理工大学于1997年研制出柴油机ECu硬件在环仿真系统L9J,其目的是为柴油机ECU软硬件的开发与测试提供性能良好的开发工具,把DCu 在发动机试验台上所做的工作转换到计算机室,通过ECU硬件在环仿真来完成,可节省资金,面且缩短了开发周期.HILSS是以PC机作为宿主计算机的紧密耦合多处理器并行系统,整个系统由三个子系统组成:发动机模型实时计算系统,接口管理系统和监控系统, 如图3所示.每个子系统由一个独立的处理器来完成.该系统具有以下功能:a.可使ECU硬件在环情况下进行发动机稳态工况与过渡工况的实时仿真.b.可进行ECU及齿杆位移执行器和齿杆位置传感器在环的实时仿真.c.可选择发动机状态参数和控制参数进行图形化和数字化实时显示.d.可对仿真结果进行有选择地存储.并可进行离线处理.e.ECU可以以模型形式参与仿真构成软件在环仿真系统.f.可对仿真结果数据文件及结果曲线进行打印输出.图3HILSS的组成系统枝准后,对BN493柴油机分配泵电控单元进行了两种类型的硬件在环仿真试验.试验1:ECU硬件在环仿真ECU与HILSS的信号联接关系如图4所示,可用于无外加信号驱动调理电路的情况下直接对ECU进行软硬件测试.汽车技术设计-计算-研究试验2:ECU和执行器硬件在环仿真信号联接关系如图5.该类型试验中所用电控系统完全等同于发动机台架试验所用电拉系统,因此该仿真试验可以在实际发动机台架试验前对电控系统进行测试,可在试验中发现并解决出现的问题, 为实际台架试验做好准备,这是其它调试方法无法做到的.圉4ECU与HILSS的信号联接圉5试验2信号联接圉3结束语在汽车控制系统的开发过程中采用硬件在环仿真技术可以进行控制系统软硬件的测试,帮助设计者了解系统的动态特性,进行极端条件的测试并准确分析每一个参数独立变化对系统特性的影响,缩短了产品的开发周期,降低了开发费用.目前,我国已经开发出用于硬件在环仿真的高性能价格比的实时处理系.硬件在环仿真可以应用于科研与工程试验的各个方面,是传统工程试验方法的重大发展,必将在汽车控制系统的开发过程中得到广泛应用.参考文献lWrightC.D.AutomotiveApplicationofElecmmicsProc IEEEWorl~hoponAutmmotiveAp#icad~m0fElectronicsDeartxx~MichigmaPP.49—53October23—24.19862KelleyDsh~ffll'lonG.FAutomotiveElectronicsaI1dEn- gineMangagementsystem—AReviewlourr~0fElectrical andElectronicsEngineeringAustraliaV ot10No.4PP286—299,19903WoodB.JAppli~VerficadonaI1dValidationtoAutomo—tSoftwareDevelopmentSAEPaper90l72l4Sava~tioC.Hardware—in—LoopSmulatlon—AnEngine ControllerImplementationSAEPaper9302046HaraldKro}~nVictorGheot~iuHalxiWal"e—in一Sim—niatlonforanElectx~nicClutchManagementS~temSAE Papez9504207U.Vat&rainT.№gD.NeumannAnEngineSgT1a1 SimulatorMicroprocemlngandMicroprogrmmaivg28 (1989)I:'219—2228DddN1ⅡmnBc~mrdBkandJn—Uw~Varcim~in AnUniversalRealtimeSimulatorforEnginesMIX,l9949朱辉.柴油机电控单元硬件在环仿真系统研究.北京理工大学博士论文.1997l0朱辉等.高性能价格比的实时处理系统.计算机应用研究,1998(1)(责任编辑维云)修改稿收到日期为1998年8月2,5日.(上接第3页)c.小红旗是首家匹配安全气囊的国产轿车.匹配SRS-40系统以后,驾驶员头颈部伤害指标较不装气囊时有显着下降,完全实现了预期目标.1998年第l2期圉3参考文献lBergfrledDeta1.ElectronicCrashSenso~forRestraint System.Imper901136(责任编辑路』,1原稿收到日期为1998年6月2日.——9——。