三维激光扫描仪(VZ-400)
使用三维激光扫描仪进行视觉测量

使用三维激光扫描仪进行视觉测量随着科技的不断进步,三维激光扫描仪作为一种高精度、非接触式的测量设备,被广泛应用于各个领域。
它能够以快速、准确的方式获取物体表面的三维信息,为工程师和设计师提供宝贵的数据支持。
本文将通过对三维激光扫描仪的介绍以及其在不同领域中的应用,探讨其所带来的革命性变化。
首先,我们来了解一下三维激光扫描仪的基本原理。
该设备通过向目标物体表面投射激光束,然后测量激光束经过反射后的信息,从而建立起目标物体的三维模型。
其测量原理主要基于激光束的时差测量或相移测量,借助高速计算机和专业软件的支持,可以实现高精度的测量。
三维激光扫描仪具有许多独特的优点,使其在各个领域受到广泛的应用。
首先,它具备非接触式测量的能力。
相比传统的测量方法,如刻度尺、百分表等,激光扫描仪不需要直接接触物体即可进行测量,避免了物体表面的磨损和形变,保护了物体的完整性。
其次,三维激光扫描仪具备高速测量的特点。
它能够在短时间内快速获取物体的三维数据,大大提高了测量效率。
在工业生产线上,激光扫描仪可以实时监测产品质量,实现自动化生产,进一步提升了工业的生产效率。
此外,三维激光扫描仪具备高精度的测量能力。
通过精确的测量,它可以获取物体表面的微小变形、裂纹、凹凸等细节信息,为工程师和设计师提供准确的数据支持。
在制造业领域,激光扫描仪被广泛应用于产品设计、质量控制等方面。
除了工业领域,三维激光扫描仪还在文化艺术、建筑设计等领域有着广泛的应用。
例如,在文化保护和修复中,激光扫描仪可以帮助专家获取文物表面的精细数据,保护文化遗产的完整性。
在建筑设计中,激光扫描仪可以获取建筑物的实际尺寸以及精确的地形地貌数据,辅助设计师进行规划和设计。
此外,三维激光扫描仪还在医疗领域有着广泛的应用。
在口腔正畸领域,激光扫描仪可以帮助医生获取患者的牙齿模型,辅助进行牙齿矫正。
在外科手术中,激光扫描仪可以通过获取患者身体的三维信息,为医生提供准确的解剖结构,提高手术的安全性和精确性。
三维激光扫描仪参数设置指南

三维激光扫描仪参数设置指南1. 前言嘿,朋友们!今天咱们来聊聊三维激光扫描仪,听起来高大上对吧?别担心,我们会把这个复杂的东西说得简单易懂。
就像喝水一样,轻轻松松就能搞定!那么,准备好了吗?咱们开始吧!2. 了解三维激光扫描仪2.1 什么是三维激光扫描仪?三维激光扫描仪就像你手里的“魔法相机”,它能瞬间把现实世界的三维数据记录下来。
你只需把它摆好,轻轻一按,咔嚓,整个场景都在它的“脑海”里了。
这就像你拍照一样,不过这个相机可不简单,能捕捉到更详细的深度信息,帮你生成超精准的三维模型。
2.2 用途有哪些?说到用途,那可是多得数不清!不管是建筑设计、文化遗产保护,还是工业测量,三维激光扫描仪都能派上大用场。
想象一下,在一个古老的寺庙里,扫描一下就能完美记录下所有细节,真是太酷了吧!而且,未来再复原的时候就方便多了,简直就是时间旅行者的必备良品!3. 参数设置的基本要领3.1 扫描模式的选择好啦,进入正题,咱们得开始调整参数了。
首先,要选择合适的扫描模式。
这里有几个常见的选择:快速模式、高清模式和室内/室外模式。
快速模式适合赶时间的朋友,反正结果也不要求太精细;高清模式呢,就像你的高清电视,细节满满,适合那些喜欢“看得仔细”的人。
室内和室外模式各有千秋,别搞混了哦!在室内扫描时,光线和反射会影响结果,得小心翼翼。
而室外就更要考虑天气情况,风一吹,数据可就飞了!3.2 分辨率与扫描范围接下来,咱们得聊聊分辨率和扫描范围。
这两个参数就像是给你的激光扫描仪穿衣服,得根据需求来选择。
分辨率越高,数据越细致,但扫描速度可能就会慢一些。
而扫描范围就像你拉开窗帘,看得越远,越能看到大千世界。
要是你只想扫描个小房间,范围就没必要设得太大,省电又省时间。
不过,记得适度哦,别像拿着放大镜看蚂蚁,哈哈!4. 实际操作小技巧4.1 数据存储与管理嘿,朋友们,数据存储也很重要!扫描完成后,数据会像一堆小星星,得好好管理。
建议你用外接硬盘,确保数据不丢失。
数字三维建模激光扫描仪RIEGL VZ-400参数

VZ-400 具有轻便、坚固耐用等显著优点,其安装和操 作也极其简单:通过自带的控制面板即可设置参数,控制 扫描,无需携带笔记本电脑,并可使用 iPhone 或 PDA 进行 远距离的遥控操作,将全部数据都储存在设备附带的存储
卡中。 设备本身具备内部数据存储能力
显示屏,防刮防反射并配备多语言菜单。 防水抗污键盘,按钮设计便于控制。 通过扩音器可获取声音信号。
建筑和正射影像测量 建立考古和文化遗产档案 隧道测量 土木工程应用及工程监测 城市三维建模 数字城市建模和车载激光扫描成像系统
Terrestrial Laser Scanning
一级安全激光制造依照IEC60825-1:2007
The following clause applies for instruments delivered into the United States: Complies with 21 CFR 1040.10 and 1040.11 except for deviations pursuant to Laser Notice No. 50, dated July 26, 2001.
扫描数据存储
内置 32 G 闪存存储 外部有 USB 2.0 存储驱动接口(可接 U 盘 /
移动硬盘)
WLAN 天线
搬运手柄
高分辨率TFT彩色液晶显示屏
控制面板
电源接口,LAN数据接口10/100 MBit/s,电源开关
GPS 天线接口
数码相机安装接口 数码码相机 USB 接口 GPS 天线接口 WLAN 天线接口 USB 2.0接口,用于插入其 他的外部存储器 LAN接口,10/100/1000 MBit/s,用于快速下载扫描 数据
Riegl三维激光扫描仪简单入门操作过程
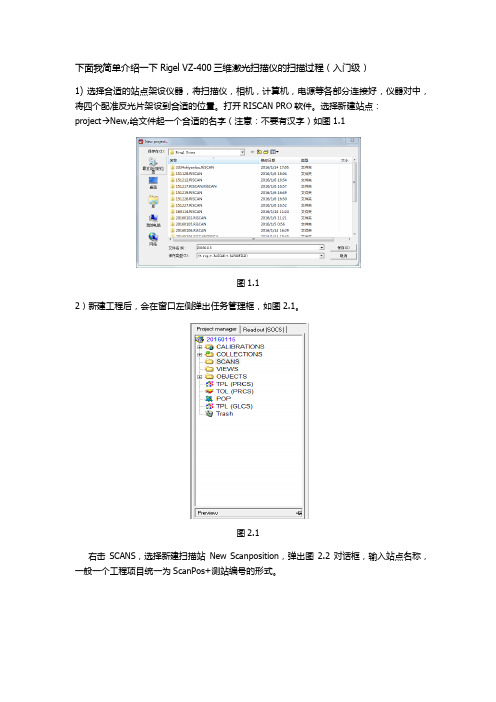
下面我简单介绍一下Rigel VZ-400三维激光扫描仪的扫描过程(入门级)1) 选择合适的站点架设仪器,将扫描仪,相机,计算机,电源等各部分连接好,仪器对中,将四个配准反光片架设到合适的位置。
打开RISCAN PRO软件。
选择新建站点:project New,给文件起一个合适的名字(注意:不要有汉字)如图1.1图1.12)新建工程后,会在窗口左侧弹出任务管理框,如图2.1。
图2.1右击SCANS,选择新建扫描站New Scanposition,弹出图2.2对话框,输入站点名称,一般一个工程项目统一为ScanPos+测站编号的形式。
图2.2点击OK,则在SCANS文件目录下,建立新的扫描站点文件,如图2.3图2.33)右键单击新建的ScanPos001站点,选择New single scan,弹出对话框图3.1图3.1单击Panorama(全景扫描),设置全景扫描参数,将Resolution[deg]分辨率改为合适的数值。
(校园三维模型建设我们用的是0.1的分辨率,我觉得这里跟点云的采集频率有关,直接影响采集数据量的大小),改为0.1后,点击右边”=”,此时Est.time估计扫描时间为1’26’’在右下角勾选Image acquisition,这样在全景扫描完后,相机会自动拍摄相片。
设置完成后,点击OK,弹出configuration扫描仪当前配置框,点击OK,扫描仪开始工作,进行全景扫描。
图3.24)全景扫描和影像获取结束后,就要开始对四个反光片进行精扫。
右击扫完后新生成的点云文件,例如图4.1中的160101_170812形式的文件。
图4.1选择Find reflectors,寻找反射片。
如图4.2图4.2在name prefix出更改合适的名称前缀,点击OK 。
图4.2之后点击Arrange windows vertically图标,将窗口按列排列,如图4.3图4.3将右侧2D视图最大化,点击Show/hide all tie points ,选择Show TPL SOCS显示反光片.视图中除安置的四个反光片之外的强反射处都是多余的,要删除这些多余的强反光处,才可以进行反光片精扫工作。
利用三维激光扫描探测建筑物裂缝的方法研究

利用三维激光扫描探测建筑物裂缝的方法研究摘要:本文首先介绍了VZ-400三维激光扫描仪的工作原理,再从实验的角度分析建筑物裂缝宽度、深度、走向以及仪器扫描视角等各项技术参数对探测的影响,将理论模型与实验成果相比较,通过分析实验结果,修正裂缝探测的理论模型,从而得到一个较为准确的理论模型。
关键词:三维激光扫描仪;建筑物裂缝1研究背景若发现建筑物有裂缝,应立即对裂缝进行观测,测定建筑物上的裂缝分布位置,裂缝的走向、长度、宽度及其变化程度。
以便根据这些资料分析其产生裂缝的原因以及它对建筑物安全的影响,及时地采取有效措施加以处理。
对于数量不多,易于量测的裂缝,可视标志型式不同,用小钢尺或游标卡尺等工具定期量出标志间距离求得裂缝变位值,或用方格网板定期读取“坐标差”计算裂缝变化值;对于较大面积且不便于人工量测的众多裂缝宜采用近景摄影测量方法;当需连续监测裂缝变化时,还可采用测缝计或传感器自动测记方法观测。
三维激光扫描技术作为一项新兴的测量技术,与传统测量手段相比具有自动化测量、测量速度快、穿透性强、精度高、非接触式测量、特别适合表面复杂物体及其细节的测量以及可以建立目标三维模型等特点。
激光扫描在变形监测领域中有着广泛的应用,利用激光扫描仪探测建筑裂缝是变形监测领域的新课题。
但大多数只对裂缝探测提出一个定性的描述,而没有对具体的探测条件做一个定量分析,因此,这一方面还有大量值得我们研究的内容。
2激光扫描仪的测量原理及数据处理2.1激光扫描仪的测量原理一套完整的三维激光扫描系统由扫描仪、控制中心、电源组成。
三维激光扫描仪的测量介质是由自身发射的一组激光束,该系统包括激光测距系统和激光扫描系统,仪器以极高的速度发射激光束,按照一定顺序扫描观测区域,然后返回包括距离、天顶距、斜率和反射率等信息,通过这些信息,仪器便可测出被测物体某一点的三维坐标信息。
通过对采集到的所有三维坐标信息进行排序整理,即可得到三维激光扫描的成果,即点云。
三维激光扫描仪原理
三维激光扫描仪原理
三维激光扫描仪是一种利用激光技术对物体进行三维扫描的设备,它能够快速、精确地获取物体表面的三维形状信息,被广泛应用于工业设计、文物保护、医学影像等领域。
其原理主要包括激光发射、光束聚焦、光斑定位、数据采集和数据处理等环节。
首先,激光扫描仪通过激光器发射一束单色、准直的激光光束,然后利用光学
系统对激光光束进行聚焦,使其成为一束细小的光斑。
这个过程需要确保激光的稳定性和光斑的清晰度,以保证后续扫描的准确性和精度。
接着,光斑被照射到待扫描物体的表面,光斑在物体表面投射出一个二维的图像,激光扫描仪通过控制光斑的移动和旋转,可以扫描整个物体表面,并且在扫描的同时记录下光斑的位置信息。
这个过程需要激光扫描仪具备高速、高精度的运动控制系统,以确保光斑的定位和扫描的连续性。
随后,激光扫描仪将记录下的光斑位置信息转化为数字信号,并通过高速数据
采集系统进行采集和存储。
在数据采集过程中,需要考虑信噪比、采样率、数据传输速度等因素,以保证采集到的数据具有足够的准确性和完整性。
最后,激光扫描仪利用数据处理软件对采集到的数据进行处理和重建,通过三
维重建算法将二维的光斑图像转化为物体表面的三维点云数据,然后根据点云数据生成三维模型。
在数据处理的过程中,需要考虑数据配准、滤波、拼接、曲面重建等算法,以获取高质量的三维模型数据。
综上所述,三维激光扫描仪通过激光发射、光束聚焦、光斑定位、数据采集和
数据处理等环节,实现了对物体表面的快速、精确扫描,为工业设计、文物保护、医学影像等领域的应用提供了重要的技术支持。
随着激光技术的不断发展和进步,相信三维激光扫描仪在未来会有更广阔的应用前景。
徕卡ScanStation 2和Riegl VZ400的比较
相机
3R (对人眼有害) , 操作员必须带眼防护 罩,不能在施工现场 使用 内置一个 100 万的傻 4 瓜相机( 1024X102 1024X1024 像素) ,镜头不可更 换扫描的发展趋势 是采用对人眼安全的 激光 配置并且精密校对过 的专业单反数码相机 0 (尼康或佳能)120 1200 万以上像素,根据场 景的远近,可更换镜 头,以提高影像的分 辨率。 Riegl 设 备的 影像 能 0 够 直 接 生 成 1 : 10 100 的正射影像图,分辨 率 高 达 1-3mm 的 影 像细节,直接用于三 维建模。
点密度 水平 X 垂直扫描角度
0.2 mm (10 米距离) 3600X1000--3600 Riegl 产 品借 助于 扫 描云台来提高垂直方 向的扫描角度,即避 免了广角畸变,又能 够增加视窗角,远优
于徕卡的设计。 接收信号数目 1个 几十个到无穷多个 模拟信号到数字型号 的飞跃变化
激光器安全等级
四、
激光扫描速度
国内和国外用户指 出,其扫描速度远低 于此指标。 0 6 秒(采集 120,00 0 4 秒(采集 5,200,00 0 全景 360 扫描最快速 29 296 120,000 5,200,000 度 激光点) 激光点) 测量精度 4-6 mm (50m 的 距 2 mm (350m 的 距 离) 离),德国著名的 Friberg 大 学 在 地 下 矿井的测试报告证实 测量距离 300 米 (90%反射率), 德国著名的洪堡大学 测试报告指出,在 150 米外的徕卡 HD S HDS 标靶 (90% 反射率 ) 测 试,已经接收不到信 号 1 mm (10 米距离) 3600X2700 360 X270 500 米 (80% 反 射 率), 实际山坡和建筑 0 物测量射程超过 55 550 米。
三维激光扫描仪的使用教程及效果展示

三维激光扫描仪的使用教程及效果展示现如今,随着科技的不断进步与发展,我们生活的方方面面都得益于现代科技的蓬勃发展。
其中,三维激光扫描仪作为一种先进的测量工具,正在被广泛应用于各行业中。
本文将为您详细介绍三维激光扫描仪的使用教程,并通过实际案例展示其出色的效果。
一、三维激光扫描仪简介三维激光扫描仪是一种使用激光测距原理进行三维信息采集与处理的仪器。
它通过发射激光束来扫描物体表面,通过接收激光反射回来的信号来测量物体的位置与形状,从而实现对物体的全方位测量与重建。
相比传统的测量工具,三维激光扫描仪具有测量速度快、精度高、操作简便等优势,被广泛应用于建筑、工程、制造、文化遗产保护等领域。
二、三维激光扫描仪的使用教程1. 准备工作在使用三维激光扫描仪之前,首先需要进行一些准备工作。
确保仪器处于正常工作状态,检查扫描仪的设备连接,确保电源充足,以便正常进行扫描操作。
另外,还需选择合适的扫描场景与扫描模式,根据实际需求确定扫描范围与精度。
2. 扫描操作开始扫描之前,我们需要将三维激光扫描仪放置在固定位置,并确保其稳定。
接着,在扫描软件中设置扫描参数,例如分辨率、角度等。
然后,根据扫描仪的指示,将激光束对准目标物体进行扫描。
在扫描过程中,需保持稳定的手持,保持扫描过程的连贯性和准确性。
3. 数据处理与重建一旦扫描完成,我们可以将扫描的数据导入到计算机中进行进一步处理与重建。
主要的数据处理步骤包括点云配准、深度图像处理、三维模型生成等。
通过配准技术,可以将多次扫描的数据进行对齐,形成一个完整的三维模型。
根据实际需求,可以对三维模型进行编辑、修复、优化等操作,以得到更加精确的模型。
三、三维激光扫描仪的效果展示随着三维激光扫描仪的普及与应用,其出色的效果也逐渐展现出来。
下面将通过几个实际案例展示三维激光扫描仪的应用效果。
1. 建筑测量与设计三维激光扫描仪可以快速准确地获取建筑物的外部结构与内部空间信息,方便进行建筑测量与设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数据处理
Octree:从原点起算,把空间分割成无数个立方体,立方体的大小 是输入的X、Y、Z值,每个这样的立方体内只保留一个测量点。 如上图:这个立方体沿X方向的长是0.5m,沿Y方向的宽是1m,沿Z方 向的高是0.2m。
Point filter(Step 5):保留数据的1/x,x是输入的数值,这里 输入5,既保留原来数据的1/5,是一种随机抽吸。
二、仪器认识
二、仪器认识
三维激光测量基本原理
三、Riscan Pro软件
• 连接仪器注意修改本地连接IP地址: 192.168.0.X(除7外) 255.255.255.0 192.168.0.1 • 新建工程修改IP并选择仪器型号:IP改为 192.168.0.125
Riscan Pro软件
Riscan Pro软件
• • • • • 菜单栏 工具栏 Project manager & Readout【socs】 Object inspector Properties
四、作业流程
• 数据获取 • 数据处理
数据抽吸 数据加工
• 生成成果及成果输出
三维激光扫描仪作业流程
实际环境
点云
竣工 3D CAD 模 型
(2)城市建筑(建立面,数字城市)
(3)土木工程(包括森林评价、监测、程序自动化 、地形学、隧道调查) (4)水利工程、岩土工程等各种工程地形测量。
考古测量
成吉思汗雕像
山西考古墓坑
建筑立面
佛山祖庙 罗湖联检大楼
土木应用
大榕树点云
大榕树信息
地形应用
六、注意问题
1、在某些视图下支持的最大点云数量是800万,这时候就需要把点云数据分割后 处理 2、注意仪器安全,接通电源时注意正负极。不使用时要注意机身干燥 3、仪器不运行的常见原因: ①仪器IP地址和工程IP地址。 ②各种线的连接。 ③查看电池电量。 ④保险丝烧掉,连接电源的线头上的保险丝和机器本身的保险丝均有可能。 ⑤周围环境温度过低,在西北,东北比较常见。 4、不要直接对准棱镜扫描,以免损坏镜头。 5、工程中,测量煤堆时站与站之间距离不应过远。
数据抽吸注意事项: • 数据抽吸之前先对冗余数据进行删除。
• 数据抽吸的方法不局限于一种,根据情况而定。
数据处理
• 数据加工 : 特征点提取
•
• •
选择需要的点,批量导出。
已某地形图为例: 目的--导出CASS软件支持的数据格式dat格式。
1. 数据整理好后,数据右键点EXPORT,选择ASCLL(*.*)数据格式。
数据获取
高精度
高精度 高精度
地面激光扫描仪 高精度 高精度
被测量物
数据处理
• 数据抽吸:采集回来的数据拼接完整后就是进行抽吸和冗余点删除。RiSCAN PRO软件提供了多种抽吸方法。如下图:
数据处理
Range gate:保留两个距离之间的数据,比如我保留距离扫描仪50米到 350米之间的数据,而小于50米和大于350米的数据都会被删除。
2. 选择数据的保存位置,保存的数据改成.csv
数据处理
• 3.打开导出的csv格式数据,在点号和X数据之间插入一列,保存
•
其他几种数据格式导出与此似,根据需要的信息选择导出数据属性。
数据成果
数据成果大概分为以下5种,RiSCAN PRO软件基本都能实现,某些 专业的领域还需要配合第三方软件来完成,比如隧道、考古、模 具等。
数据处理
2.5D raster:首先要建立一个平面,平面的走向根据需要而定,已 我们要做等高线来定,我们在数据的下方建立一个XY方向的平面, 我们可以选择一定的间隔保留一个点,保留的这个点可以在选择点 云的上方、中间或者下方的点;因为是固定间隔保留点,所以这个 点不一定是原始数据上的点。
数据处理
• • • • •
特征点 线画图 截面线 截面 三维模型
数据成果
已某个矿山建模,生成等高线为例,采集数据如下:
数据成果
数据冗余点删除,抽吸成间隔1米如下:
数据成果
在数据下方建立一个XY走向的平面,进行建模,模型建立如下
数据成果
在测区内进行测量,施工方不会因为我们作业而停止工作,这样在 扫描过程中难免会因为空中有灰尘造成一定程度的噪音点,软件 中提供自动过滤三角网的功能----数据平滑
数据成果
平滑后的模型如下图
数据成果
生成等高线
成果展示
二维成果展示:
成果展示可以在不同的软件中实现,目前常用的如CAD、Arcgis等, 可以打印出不同类型的成果格式。
三维成果展示
三维成果可以通过录制视频,或者在软件中进行漫游,录制出AVI 等格式视频,在相关播放软件中浏览。
五、集 扫描实际环境
3D 模型建造
筛选
Auto CAD软件 可以得出二维图, 3D max形成三维图
数据输出 Riscan pro
数据获取
• 数据获取应该注意的事项:
RIEGL扫描仪倾斜补偿±10°,所以在摆放三角架时要注意扫描仪倾斜不要超 过10°
地形测量时,扫描仪尽量架设在制高点上,视野比较开阔,同时应该注意扫描 仪周围20米内尽量不要有遮挡物;扫描分辨率不要设置太大,点云过多处理起 来会比较费时 立面测量时,受扫描仪垂直方向视场角的限制,扫描仪和被测建筑之间的距离 尽量大些,被测建筑点与点间隔控制在1cm之内 雕塑、佛像等建模时,要注意数据扫描的完整性,并且分辨率设置要大些,点 间隔尽量控制在3mm以内,如果扫描点不完整的话,后续处理会比较繁琐
数据获取
• 数据拼接注意事项:
• 站与站之间距离在100米之内时,我们一般用RIGEL专用标靶来拼接。标靶的摆 放位置既要两站都扫描到又不要在同一个平面内。
• 坐标拼接: • 如果仪器架设在控制点上,或者仪器上部外置GPS时,标靶既为后视点,这样 标靶尽量用10cm以上的,并且距离测站点尽量远些。(类似全站仪后视定向) • 仪器不架设在控制点上时,在仪器周围要至少放置3个标靶,这三个标靶要均 匀的并且尽量距离远的放置在仪器周围。 (示意图在如下) • 附:国内坐标系X是北方向,和软件是相反的,在处理数据时要注意不要把X、 Y混淆。
三维激光扫描仪系统
VZ-400
目录
• • • • • • • 一、概述 二、仪器认识 三、软件介绍 四、作业流程 五、应用领域 六、注意问题 七、外业展示
一、概述
• 三维激光扫描测量的方法就是大面积高分 辨率地快速获取被测对象表面的三维坐标 数据。它的特点就是快速性,不接触性, 实时、动态、高密度、高精度获取信息。