利用leica激光跟踪仪对工业机器人现场标定的方法
Leica ALS60机载激光扫描仪检校方法浅析

Leica ALS60机载激光扫描仪检校方法浅析刘玉萍;李鹏【摘要】机载LiDAR(激光探测测距仪)是一款新型空间测量设备,通过在航空平台对地发射、接收激光脉冲,实现地表空间三维坐标快速、精确获取,通过机载POS数据解算,重构目标场景的3D离散化数据模型,再现地表的实时的、真实的形态特性。
因此被有些专家称为:“继GPS空间定位技术之后在测绘领域的又一项测绘技术新突破,是一种崭新的革命性的测量工具”。
由于LiDAR设备的物理特性,激光扫描仪的检校精度起着至关重要的作用,直接影响着激光点云的解算测量精度,现介绍和探讨 Leica ALS60机载激光扫描仪的相关检校方法,仅供同行参考。
【期刊名称】《测绘技术装备》【年(卷),期】2013(000)001【总页数】3页(P47-49)【关键词】LiDAR;点云精度;激光扫描仪检校参数;检校方法【作者】刘玉萍;李鹏【作者单位】河南省遥感测绘院河南郑州 450003;河南省遥感测绘院河南郑州450003【正文语种】中文Leica ALS60机载LiDAR主要由激光扫描仪、航空数码相机、POS单元(定位定姿惯性导航系统)及相关控制系统组成。
为了得到高精度的激光点云,需要在设备安装在飞机平台后,进行检校场飞行,须在合适航高下,完成反向飞行和十字交叉飞行,利用所获取的激光数据和检校场野外采集的地面检测点数据,经计算分析,测定出激光扫描仪的参数配置,其检校参数可应用于快速生成测区内的标准激光点云,以下对激光扫描仪各检校参数和检校方法具体介绍。
2.1 基本检校参数机载LiDAR激光扫描仪需检校的基本参数有:强度距离检校(IBRC)、脉冲转换频率、扫描镜角度检校。
2.1.1强度距离检校(IBRC)反映了激光在不同反射率下的速度纠正参数,激光从高反射率表面反射速度快,因此测得的高程会高于实际的高程。
激光从低反射率表面反射速度慢,因此测得的高程会低于实际的高程。
IBRC表(图1所示),包含了激光对于反射强度从0-255每一个级别的距离纠正值。
基于激光跟踪仪的机器人误差测量系统标定
基于激光跟踪仪的机器人误差测量系统标定摘要:机器人视觉被认为是机器人最重要的感知能力。
机器人视觉不仅具有视觉测量技术的优点,而且具有机器人运动范围大、柔性等特点,但其本体绝对定位精度低,使得机器人视觉测量系统的测量精度达不到要求。
为了测量出工业串联机器人的空间定位误差,根据工业机器人定位误差测量系统的特点,采用基于距离约束的方法实现了6自由度串联机器人Tool0坐标系与测量靶标坐标系之间的位置矩阵(机械手中心坐标系)的自动化标定过程,同时分步实现了机器人基坐标系与测量设备基坐标系之间的位姿矩阵(基坐标系)自动化标定过程;建立了基于激光跟踪仪的工业串联机器人空间定位误差测量系统,并根据测量数据具体标定出了涉及到的各个坐标系,验证了算法的有效性,为工业串联机器人空间定位误差的测量打下了基础。
关键词:基于激光跟踪仪;机器人;误差测量;系统标定前言一般工业机器人重复定位精度很高,但空间绝对定位精度很差。
为了提高机器人的性能及拓展工业机器人的应用范围,需要对机器人运动学模型的参数进行标定来降低它的绝对定位误差。
机器人标定一般分 4 个步骤进行:建模、测量、辨识与补偿。
为了测量出机器人在其工作空间内的各个测量点的定位误差,需要对测量靶标中心在机器人末端的位置(机械手中心坐标系)及机器人基坐标系与测量设备坐标系之间的转换矩阵(基坐标系)进行标定,以将直接从机器人中获取的末端法兰盘中心测量数据与测量设备测得的靶标中心的数据统一到一个坐标系下。
因此在工业机器人空间定位误差测量过程中涉及到串联机器人空间的位姿(位置及姿态)和基坐标系标定的问题。
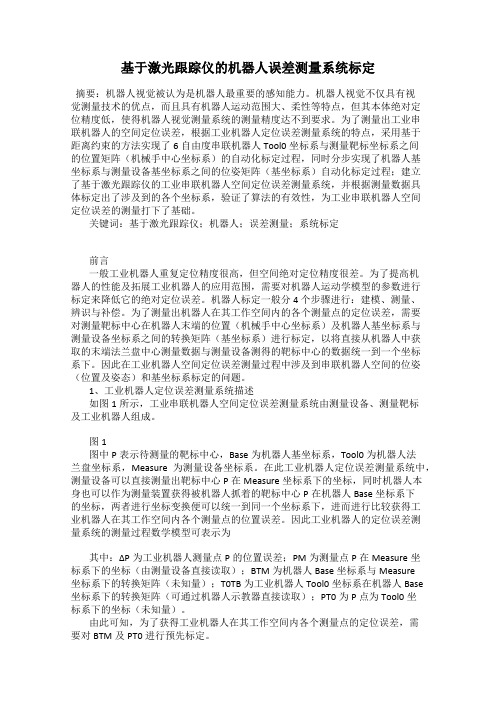
1、工业机器人定位误差测量系统描述如图1所示,工业串联机器人空间定位误差测量系统由测量设备、测量靶标及工业机器人组成。
图1图中P表示待测量的靶标中心,Base为机器人基坐标系,Tool0为机器人法兰盘坐标系,Measure为测量设备坐标系。
在此工业机器人定位误差测量系统中,测量设备可以直接测量出靶标中心P在Measure坐标系下的坐标,同时机器人本身也可以作为测量装置获得被机器人抓着的靶标中心P在机器人Base坐标系下的坐标,两者进行坐标变换便可以统一到同一个坐标系下,进而进行比较获得工业机器人在其工作空间内各个测量点的位置误差。
leica激光跟踪仪工作原理

leica激光跟踪仪工作原理
Leica激光跟踪仪的工作原理涉及激光技术和跟踪技术。
首先,激光技术利用激光器产生一束高度聚焦的激光束,这个激光束可以
被用来精确测量距离和位置。
其次,跟踪技术利用传感器和算法来
检测和跟踪特定目标的运动。
Leica激光跟踪仪通过将激光束投射
到目标上并使用传感器来测量激光束的反射或散射,从而确定目标
的位置和运动轨迹。
这些数据可以被用来实现目标的跟踪和定位,
适用于各种应用领域,如工业制造、建筑测量、医学影像等。
通过
精密的激光技术和跟踪技术的结合,Leica激光跟踪仪能够实现高
精度的目标跟踪和定位。
基于非水平位移的激光跟踪仪测角误差标定方法

基于非水平位移的激光跟踪仪测角误差标定方法+李辉,伍嘉豪,赵伟康,马大智,周志龙,于斌超,刘巍(大连理工大学机械工程学院,辽宁大连116023)摘要:激光跟踪仪因测量范围大、精度高等优势被广泛应用于大型航空构件的大尺寸测量。
然而,随着测量范围的增大,其测量精度将受到测角误差的严重影响。
为了实现激光跟踪仪测角误差的准确评估,提出了一种基于非水平位移的激光跟踪仪测角误差标定方法。
以空间任意运动位移为约束,采用三坐标测量机与高精度位移台分别对空间任意位移的角度与长度进行高精求解,进而利用激光跟踪仪的干涉测长距离为约束,实现转角的有效表征,进而实现角度误差的高精标定。
通过实验室试验,实现了激光跟踪仪测角误差的有效标定。
关键词:测角误差;激光跟踪仪;角度标定;非水平位移;大尺寸测量中图分类号:TH744;TB922文献标志码:ACalibration Method of Angle Error of Laser Tracker based on Non-horizontal Displacement LI Hui,WU Jiahao,ZHAO Weikang,MA Dazhi,ZHOU Zhilong,YU Binchao,LIU Wei(College of Mechanical Engineering,Dalian University of Technology,Dalian116023,China) Abstract:Laser tracker was widely used in large-scale measurement of large aviation components due to its advantages oflargerangeandhighprecision However!withtheincreaseofmeasurementrange!the measurementaccuracy wasseri-ouslya f ectedbytheanglemeasurementerror Inordertorealizeaccurateevaluationofangleerror!acalibration methodof angleerroroflasertrackerbasedonnon-horizontaldisplacementwasproposed Theangleandlengthofarbitrarydisplace-mentinspaceweresolvedbythreecoordinatemeasuring machineandhighprecisiondisplacementplatformrespectivelywith theconstraintofarbitraryspatialmotiondisplacement Andthee f ectiverepresentationofanglewasrealizedbyusingthein-terferencemeasurementdistanceoflasertrackerasconstraint!thenthehigh-precisioncalibrationofangleerrorwas made Theexperimentalresultsshowedthattheangleerrorlasertrackerwascalibratede f ectivelyKey words:angle measurement error,laser tracker ,angle calibration ,non-horizontal displacement,large-scale measurement激光跟踪仪具有测量范围大、单点测量精度高等优点,被广泛应用于航空航天装备制造过程中的大尺寸几何测量&12'(随着大型构件尺寸与制造精度的极值化,测量精度和可靠性的要求愈发提高(为了有效评估几何量测量结果的可靠性,需要对测量仪器的系统误差进行评估激光跟踪仪为非正交测量系统,通过干涉测长与2个角度编码器的角度测量,实现了球坐标系下三维坐标的测量。
激光跟踪仪测量系统在SCARA机器人行业的应用

应用 Application激光跟踪仪测量系统在SCARA 机器人行业的应用叶勇(海克斯康测量技术(青岛)有限公司,山东省青岛市266000)1前言随着“中国制造2025”的有序推进,信息技术与制造技术深度融合的数字化、网络化和智能化制造成为行业 趋势,这也推动了中国智能机器人在制造业的广泛应用。
SCARA 机器人作为一种快速、高效、安装方便和成本低 廉的方案,得到很多产业的青睐,特别是计算机、通信和消费性电子等产业尤其注重。
长期以来,SCARA 机器人的校准及测量一直缺少准确而高效的测量手段,也缺少相 关测试标准工具。
Leica 激光跟踪仪测量系统以其完善的 测量附件及快速高效的测量软件等给SCARA 机器人校准及测试树立了新的标准。
2 Leica 激光跟踪仪测量系统介绍Leica 公司是激光跟踪仪技术的开创者,如图1所示。
Leica AT960绝对激光跟踪仪是全新一代的便携式三坐标 测量系统,高度精密并易于使用的大空间尺寸测量解决方案,总体重量不足14 kg,运输便捷,几乎在任何地方都 可以快速开箱,迅速启动,并进行高性能的测量作业,可提供六自由度(6DoF )探测、扫描、自动化检测和反射球 测量的全面测量解决方案,帮助用户实现绝对速度、准确度和便携性。
Leica 绝对干涉仪(AIFM )能够对移动目标实现高度、高速度测量作业,而创新型Powerlock 功能能够确保在没有用户干涉的情况下实现断光续接,从而减轻 操作人员工作负荷并降低其训练要求。
直观的触摸屏控制 功能,可以最大程度降低用户错误的可能性。
设备具有自检和补偿功能,允许现场进行基本调整,其坚固耐用的设 计能够最大程度地减少校准和维护作业。
图1激光跟踪仪AT960的测量空间直径最高可以达到160 m,能够兼容T-Probe, T-Mac 和T-Scan 等各种测量附件,而对于 SCARA 机器人测试来说,主要使用的是Leica 专利技术 的SCE 超级猫眼反射球(见图2 )及TMAC 六维智能测头(见图3) o-60-******************.cn .应用 Application图2 SCE 超级猫眼反射球 图3 TMAC 六维智能测头TMAC 是Leica 公司针对机器人测试的专业智能六维测试工具,具备高效的六自由度测试能力,可以在一次采集即可获取准确的位置及角度准确度(优于0.01° ),同时可以动态最高1 kHz 采集运动姿态数据,高效便捷。
Leica AT402 角精度 0.5秒

无线设计
集成 WiFi 通讯技术及机载电池,系统可 工作于全无线状态
热交换电池系统(操作) 自动目标识别 (ATR) PowerLock 快速断光续接技术
久经验证的绝对测距技术
无需担心交流供电电源-测量系统可无间 断自动切换为电池供电
ATR 支持 320m(全量程)内不同反射镜持 续跟踪和定位
无需担心“断光”,跟踪仪可自动锁定 目标,较传统激光跟踪仪断光续接节省 20% 时间
Leica AT402 绝对激光跟踪仪 11
海克斯康计量为工业计量提供了完善的产品和服务,客户 遍及汽车、航空航天、能源和医疗等领域。从产品开发、 设计到加工、装配和最终验收,我们为用户提供贯穿产品 全生命周期的可操作测量信息。
凭借遍布全球的20多个测量产品制造基地、70多个提供技 术服务与方案展示的精密计量中心,以及分布于全球五大 洲的100多个分销合作伙伴所组成的网络,确保客户完全 掌控其制造流程、提升产品品质并实现制造效率的提升。
海克斯康测量技术(青岛)有限公司 青岛市株洲路 188 号 客户服务热线:400 6580 400
Leica计量精度最高的测距仪:ADM分辨 率为 0.1μm,最大测量不确定度 10μm
器更加 便于系统的定位与安装
预览相机
集成预览相机便于在线锁定大空间内固 定目标
集成环境传感器
自动读取及更新的环境参数传感器确保 测量数据的实时修正
Leica 计量专用绝对细分系统
具有0.07的分辨率的绝对角度编码器,
角度精度 确保可溯源ISO17123-3 的 0.5” 精度
以太网供电
基 于 系 统 的 低 耗 电 , 设 备 使 用 P OE + 技 术,可以对激光跟踪仪传输数据和供电
基于激光跟踪仪的机器人运动学参数标定方法讲解
第 40卷第 2期 2007年 2月天津大学学报 Journa l of T i a n ji n Un i versity Vol . 40 No . 2Feb . 2007收稿日期 :2006203210; 修回日期 :2006209206.基金项目 :天津市应用基础研究重点资助项目 (05YFJZJC01700 .作者简介 :叶声华 (1934— , 男 , 中国工程院院士 , shhuaye@tju . edu . cn .基于激光跟踪仪的机器人运动学参数标定方法叶声华 , 王一 , 任永杰 , 李定坤(天津大学精密测试技术及仪器国家重点实验室 , 天津 300072摘要 :工业机器人的连杆参数误差是影响其绝对定位精度的最主要因素 , 为改善机器人的绝对定位精度 , 借助了高精度且可以实现绝对坐标测量的先进测量仪器———激光跟踪仪 , 以及功能强大的 C AM2M easure 4. 0配套软件 , 从机器人自身的运动约束出发 , 构建起实际的 D 2H 模型坐标系 , 进而对运动学参数进行了修正 , 获得了关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系 . 结果表明 , 400/0以上 , 且该方法易于实现 , 通用性强 , 能明显改善精度 .关键词 :工业机器人 ; 绝对定位精度 ; 激光跟踪仪 ; D 2H 模型 ; 中图分类号 :TP243. 2文献标志码 :A 02li ti c Param eters sed on La ser Tracker YE Sheng 2hua, WANG Yi, RE N Yong 2jie, L ID ing 2kun(State Key Laborat ory of Precisi on Measuring Technol ogy and I nstru ments, Tianjin University, Tianjin 300072, ChinaAbstract :L ink parameter err ors of the industrial robot contribute t o the most influence on its accuracy . I n or 2der t o i m p rove the accuracy of the robot, a laser tracker, which can i m p lement highly accurate measurement and abs olute distance measurement (ADM , as well as the corres ponding CAM2Measure 4. 0s oft w are were em 2p loyed . Based on the movements constrain of the r obot itself, the actual D 2H model coordinate frames were re 2built . Accordingly, the kinematic parameters were identified and p recise mapp ing from the joint variables t o the center positi on of the end 2effector in the base frame was obtained . Results show that mean error and r oot mean sguare err or are i mp r oved more than 400/0. The p roposed calibrati on method is p ractical and generic . In addition, it can achieve better accuracy .Keywords :industrial robot; abs olute accuracy; laser tracker; D 2H model; movements constrain工业机器人的运动精度对于它在生产中的应用可靠性起着至关重要的作用 . 机器人各连杆的几何参数误差是造成机器人定位误差的最主要环节 , 它主要是由于制造和安装过程中产生的连杆实际几何参数与理论参数值之间的偏差造成的 , 一般被视为系统误差 . 除此之外 , 其他影响因素还包括由环境 (例如温度的变化、对运动参数的不确切认知、齿轮传动误差以及由于负重、应力和磨损等引起的机械变形误差等等 , 这些一般被视为随机误差 . 机器人的重复性精度只与随机误差有关 , 可以保证在 0. 1mm 以下 ; 绝对定位精度与系统误差有关 , 可以达到 2~3mm , 甚至更大 [1]. 国内外的许多学者就机器人运动学参数识别和标定问题进行了大量研究 [2— 8]. 通常采用的方法是先建立适当的运动学模型 , 然后精确测量几组位姿 , 接着推导参数识别算法或建立机构误差模型 , 最后获得实际模型参数并运用正向运动学求解真实位姿 [9]. 最近 , 世界著名工业机器人生厂商 ABB 公司运用了莱卡激光跟踪仪以保证其产品的精度 . 使用激光跟踪仪标定机器人不再需要其他的测量工具 , 从而也就省去了标定测量工具的繁琐工作 ; 同时 , 这一方法是对机器人的各个运动学参数进行修正 , 结果会使机器人在整个工作空间内的位姿得到校准 , 而不会像用迭代求解的方法那样 , 只是对某些测量姿态进行优化拟合 , 可能会造成在非测量点处残留相对较大的误差 ; 再者 , 随着机器人的机械磨损 , 机器人的运动学参数需要重新标定 , 而激光跟踪仪测量系统配置起来简单 , 特别适合于工业现场标定 . 正是鉴于以上优点 , 笔者采用激光跟踪仪作为测量工具去修正机器人的运动学参数 .1机器人模型的建立标定对象是 ABB 公司生产的 6自由度 I RB2400/10型串联机器人 , 测量工具是 F ARO 公司的 X i 型激光跟踪仪 , 该仪器测量绝对距离的精度为10μm +0. 4μm /m. D 2型 [10]. 为遵从这一模型 , (1 确定 z i 轴 . z i i 1的轴向 .(2 O i . :O i 在过 z i -1和 z i 轴的公法线上 .(3 确定 x i 轴 . 基本原则是 :x i 轴过 z i -1和 z i 轴的公法线方向 , 从 z i -1指向 z i .(4 确定 y i 轴 . 基本原则是 :y i =z i ×x i , 使坐标系为右手坐标系 . 这样就能建立起如图 1所示的坐标系系统.图 1机器人的 D 2H 模型坐标系F i g . 1 D 2H coord i n a te fram es of the robotD 2H 参数的定义如下 :杆件长度 a i 定义为从 x i -1到 x i 的距离 , 沿 x i 轴指向为正 ; 杆件扭角αi 定义为从 z i -1到 z i 的转角 , 绕x i 轴正向转动为正 , 且规定αi ∈ (-π, π];关节距离 d i 定义为从 x i -1到 x i 的距离 ,沿 z i -1轴指向为正 ; 关节转角θi 定义为从 x i -1到 x i 的转角 , 绕 x i -1轴正向转动为正 , 且规定θi ∈ (-π, π].有了这样的定义 , 可以得到相邻关节之间的齐次坐标变换矩阵[10]为i -1A i =Trans z (d i Rot z (θi Trans x (a i Rot x (αi =c i -c αi s i s αi s i a i c is ic αi c i -s αi c ia i s i 0s αi c αi d i1i =1, 3, 4, 5, 6然而 , 当相邻 2根轴线平行或近乎平行时 , 末端法兰盘的位置误差并不能通过修正 D 2H 参数来消除 . 为了避免这种数值不稳定的奇异性 , 再引入一个绕 y 轴的转角参数 , 记作β[11].i -1A i =Trans z (d i Rot z (θi Trans x (a i Rot x (αi ・Rot y (βiy (i =ii 10-sin βi0cos βii =2最后 , 根据正向运动学求解可以得到末端法兰盘坐标系到机器人基坐标系的坐标变换矩阵 0A 6=A 11A 22A 33A 44A 55A 6.2标定原理与数据测量机器人标定的目的是提高其绝对定位精度 , 也就是确定从关节变量到末端执行器在工作空间内真实位置的更为精确的函数关系 . 在本文中 , 实际模型参数的获得是通过建立真实的机器人 D 2H 坐标系实现的 , 其中的关键任务是确定机器人各根转轴的相互位置 . 一个点绕不经过它的直线旋转一周后 , 会在空间内形成一个圆周轨迹 , 圆周所在的平面与轴线垂直且圆心位于轴线上 . 据此 , 令机器人的某一根轴从零位位姿开始作步进转动 , 并保持其余 5根轴不转动 , 这样 , 各个姿态时的法兰盘中心点就位于同一条圆弧上 , 那么过该圆弧圆心且与圆弧所在平面垂直的直线方向 (或是相反方向就是转动轴的轴线方向 . 考虑到各种噪声的混入 , 采取最小二乘法拟合圆弧及其所在平面 . 为了减小噪声的影响 , 应该测量尽可能多的目标点 . 测量时 , 激光束会遇到机器人本体的阻挡 , 所以在末端关节上增加了辅助支架以扩大测量范围 . 该支架的引入只会造成旋转半径的变化 , 而不会影响到轴线位置的确定 . 因此 , 支架只要具有一定刚性 , 并通过简单的螺纹装配即可 , 并无其他设计和精度上的要求 . 同时 , 轴 4和轴6的圆弧半径显著增大 , 减小了扰动对测量结果的影响 .测量过程中还需要注意 3个问题 . 第一 , 轴 1会影・302・ 2007年 2月叶声华等 :基于激光跟踪仪的机器人运动学参数标定方法响到基坐标系原点的确定 , 作用尤为重要 , 所以应尽量使轴 1能够转动出整个圆周轨迹 ; 解决方法是调整机器人姿态 (而不是相对于零位位姿 , 使轴 1可以转动 ±180°. 第二 , 由于四杆机构的存在 , 轴 2的转动会使得轴 3也相应转动 , 从而将轴 3的误差带入到测量结果 ; 为了解决这一问题 , 可以在连杆 2上牢固地胶粘一个靶标球座 , 并将靶标球置于其上 , 这样测量结果中就不再包含轴 3的影响 . 第三 , 激光跟踪仪的测量精度与测量距离有关 , 测量距离越大则精度越低 . 所以 , 在保证一定测量范围的同时应尽量减小跟踪仪与机器人间的距离 . 标定现场如图 2所示 . 按照表 1对机器人进行编程、测量 , 共获得 428组数据.图 2实验设备配置F i g . 2 Conf i gura ti on of the exper i m en t a l setup 表 1数据的获得Tab . 1 Da t a acqu i re m en t序号范围 /(°递增 /(°测量点数1-180, 1805732-100, 1103713-60, 602614-200, 2005815-120, 1203816-180, 180661在实际操作中 , 除了基坐标系以外 , 所有的中间坐标系都能唯一地确定下来 . 为了确定基坐标系 , 在这里先简要说明一下机器人的装配过程 :先用基准尺构造两个互相垂直的平面 (水平面和竖直面 , 机器人基平面平行于水平面 , 基坐标系 z 轴位于竖直面内 ; 然后在外部工具的帮助下使机器人的各根轴处于横平竖直的姿态 , 此时安装电机编码盘并调零 , 且认为这时的姿态就是零位姿 , 以后的电机转动都以编码盘读数为准 ; 最后以基坐标系 z 轴与基平面的交点为坐标原点 , 由坐标原点指向法兰盘中心在基平面上投影点的直线方向为 x 轴的方向 . 由此 , 按照以下步骤确定基坐标系 .步骤 1确定基平面 . 直接使用靶标球对机器人的安装平面进行测量 , 尽可能在平面上分布地多取些点 , 以获得平面的真实面貌 . 由于安装平面并不与基平面重合或是平行 , 可以多测量几组 , 然后挑选出最佳的一组作为基平面 . 步骤2确定基坐标系的原点 . 轴 1与基平面的交点作为基坐标系的原点 . 步骤 3确定基坐标系 x 轴的方向 . 因为机器人的重复性定位精度很高 , 所以在建模时也按照机器人在装配时定义 x 轴的方法那样确定 x 轴方向 .3 , 利用 CAM2Measure 4. , 拟2所示 , 修正前后运动学参数的对比见表 3和表 4. 表 2平面和圆弧的拟合误差Tab . 2 Pl ane and arc f it errors on m ea sured da t a mm序号平面拟合误差弧度拟合误差10. 02990. 031820. 00870. 036630. 02630. 029440. 01370. 008650. 01220. 030860. 01250. 0271基平面0. 1206表 3 D 2H 参数的名义值Tab . 3 No m i n a l k i n e ma ti c param eters序号a i /mmαi /(°d i /mmθi /(°βi /(°1100-906150270500-9003135-90004090755050900180685・402・天津大学学报第 40卷第 2期表 4 D 2H 参数的修正值Tab . 4 I den ti f i ed k i n ema ti c param eters序号a i /mmαi /(° d i /mmθi /(° βi /(° 1100. 050-90. 010614. 7150. 001 2705. 554-0. 0200. 003-90. 060-0. 03 3135. 456-89. 99000. 02040. 15690. 017754. 918-0. 01050. 11089. 980-0. 102179. 96060. 0300. 01084. 940-0. 010注:β2 为 z1到 z2轴的转角 , 绕 y1轴正方向为正 .为了对修正结果进行验证 , 又另外随机测量了 30个点 , 由表 5可以看出 , 标定之后平均误差较之前改善了 41. 870/0,均方根误差改善了 42. 440/0. 这里的均方根误差e RM S =∑mi =1(pr-p n 2i(m =30 , p r际坐标向量 , pn5Tab . 5 Va li da ti of the ca li bra ti on result mm 验证参数标定前标定后 (不带β参数标定后 (带β参数最大误差 1. 711. 330. 99平均误差 1. 060. 910. 62均方根误差 1. 160. 960. 664结语通过参数所起的作用进一步证明了将其引入的必要性 , 而且在进一步的工作中可以尝试再次引入其他模型参数 , 如沿 y 轴方向的平移参数 , 以期待有更加满意的标定效果 . 同时也可以看出 , 由于基平面的测量是通过安装平面的测量间接实现的 , 而安装平面并没有达到精加工的程度 , 故相比之下拟合误差比较大 , 有望提高安装平面的加工水平或是采取新的测量方法以减小基平面的拟合误差 .参考文献 :[1]韩翔宇 , 都东 , 陈强 , 等 . 基于运动学分析的工业机器人轨迹精度测量的研究 [J ].机器人 , 2002, 24(1 :12 5.Han Xiangyu, Du Dong, Chen Q iang, et al . Study of mea 2sure ment of traject ory p recisi on f or industrial r obot based on kinematics analysis[J ].R obot, 2002, 24(1 :125(in Chi 2 nese .[2] Gong Chunhe, Yuan J ingxia, N i Jun . Nongeometric err or identificati on and compensati on f or r obotic syste m by inverse calibrati on [J ].International Journal of M achine Tools & M anufacture, 2000, 40(14 :211922137.[3]刘振宇 , 陈英林 , 曲道奎 , 等 . 机器人标定技术研究 [J ].机器人 , 2002,24(5 :4472450.L iu Zhenyu, Chen Yinglin, Qu Daokui, et al . Research on r obot calibration[J ].Robot, 2002, 24(5 :4472450(in Chi 2 nese .[4] Motta J M S T, de Carvalho G C, M c Master R S . Robot ca 2 librati using a 3D visi on ment syste m with a single J Integrated M anu 2[m er C E, Horning R J, et al . Calibra 2 a Mot oman P8r obot based on laser tracking [C ]∥ Proceedings of the 2000IEEE International Conference on Robotics &A uto m ation . San Francisco, C A, 2000:35972 3602.[6] Bai Ying, Zhuang Hanqi, Roth Zvi S . Experi m ent study of P UMA r obot calibrati on using a laser tracking syste m [C ]∥ Proceedings of the 2003IEEE InternationalW orkshop on Soft Co m puting in Industrial A pplications . B ingha m t on, New York, 2003:1392144.[7]张建忠 . 机器人连杆参数的视觉标定 [J ].制造业自动化 , 2004,26(11 :32234.Zhang J ianzhong . V isual de marcating f or link para meters of a r obot[J ].M anufacturing A uto m ation, 2004, 26(11 :322 34(in Chinese .[8] Gursel A lici, B ijan Shirinzadeh . A syste matic technique t o esti m ate positi oning err ors for r obot accuracy i m p r ove ment using laser interfer ometry based sensing[J ].M echanis m and M achine Theory, 2005, 40(8 :8792906.[9] Roth Zvi S, Mooring Benja m in W , Ravanil Bahra m. An overvie w of r obot calibrati on [J ].IEEE Journal of R obotics and A uto m ation, 1987, RA 23(5 :3772385.[10] Denavit J, Hartenberg R S . A kine matic notati on f or l ower 2 pair mechanis m s based on matrices[J ].Journal of A pplied M echanics, 1955, 22(2 :2152221.[11] Hayati S A. Robot ar m geometric link para meter esti m ati on [C ]∥Proceedings of 22th IEEE D ecision and Control Confe 2 rence . San Ant oni o, T X, US A, 1983:147721483.・ 5 0 2・2007年 2月叶声华等 :基于激光跟踪仪的机器人运动学参数标定方法。
激光跟踪仪与机器人坐标系转换方法研究

激光跟踪仪与机器人坐标系转换方法研究向民志;范百兴;李祥云;隆昌宇【摘要】In order to solve the conversion parameters of the laser tracker and the robot coordinate system quickly and accurately,a coordinate transformation method based on tool calibration and common point conversion is proposed.Firstly,the target ball was fixed on the robot end tool,the robot was taught to teach six different positions,and the center coordinates were measured by the laser tracker.Then,the position of the target ball in the robot coordinate system was calculated based on the distance constraint method;Finally,the least squares iteration based on Rodrigue matrix was adopted to coordinate transformation.The experimental results show that this method is simple and can avoid the influence of fitting error and improve the precision of coordinate transformation.%为了快速准确求解激光跟踪仪与机器人坐标系转换参数,提出了一种基于工具标定与公共点转换相结合的坐标转换方法.首先,将靶球固定在机器人末端工具上,控制机器人示教6个不同位置,并同时用激光跟踪仪测量球心坐标;然后,采用基于距离约束的方法计算靶球在机器人基坐标系中的位置;最后,采用基于罗德里格矩阵的最小二乘迭代法进行坐标转换.试验表明:该方法操作简单,能够避免拟合误差的影响,提高坐标转换精度.【期刊名称】《航空制造技术》【年(卷),期】2018(061)001【总页数】4页(P98-101)【关键词】激光跟踪仪;机器人坐标系;罗德里格矩阵;坐标转换;定位误差【作者】向民志;范百兴;李祥云;隆昌宇【作者单位】解放军信息工程大学,郑州450001;解放军信息工程大学,郑州450001;解放军信息工程大学,郑州450001;北京卫星环境工程研究所,北京100094【正文语种】中文一般工业机器人重复定位精度很高,但绝对定位精度较差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用leica激光跟踪仪对工业机器人现场标定的方法
利用Leica激光跟踪仪对工业机器人现场标定的方法如下:
1. 准备工作:安装好Leica激光跟踪仪,并确保其与工业机器
人的工作范围相符合。
同时,确保机器人末端工具与激光探测器末端工具夹具接口量具的安装正确。
2. 连接与校准:将激光跟踪仪与计算机或控制器连接,确保两者能够正常通讯。
接下来,校准激光跟踪仪,以确保其测量准确性。
3. 机器人末端安装:将激光探测器安装在工业机器人的末端工具上,并确保其位置和姿态与机器人末端工具的实际位置一致。
4. 数据采集:使用Leica激光跟踪仪,按照指定的路径和位置,开始采集机器人末端工具的位置和姿态数据。
5. 数据处理:将采集到的数据导入计算机或控制器,并通过相应的软件进行处理和计算。
这些软件通常会使用标定算法来计算机器人末端工具和激光探测器之间的变换矩阵。
6. 标定结果验证:将计算得到的变换矩阵应用于机器人的运动控制中,然后进行标定结果的验证。
可以通过将机器人末端工具移动到一系列已知位置,并检查其与实际位置之间的误差来验证标定的准确性。
7. 调整和重复:根据验证结果,进行必要的调整和重复上述步骤,直到达到满意的标定效果。
以上是利用Leica激光跟踪仪对工业机器人现场标定的一般方法。
具体操作步骤可能会根据激光跟踪仪和机器人的型号以及使用的软件而有所不同。
因此,在进行标定之前,建议参考相应的设备和软件使用手册,以确保正确操作。