基于DS证据理论的多源数据融合
基于D-S证据理论的多源遥感图像目标数据联合关联算法
基于D-S证据理论的多源遥感图像目标数据联合关联算法汤亚波;徐守时
【期刊名称】《中国科学技术大学学报》
【年(卷),期】2006(036)005
【摘要】以遥感图像目标识别结果为主,结合卡尔曼滤波器获得的目标运动状态估计结果,提出一种基于D-S证据理论的目标数据联合关联算法.蒙特卡罗模拟实验结果表明,该方法稳定性较强,适合于对海上船舶等遥感图像目标的持续跟踪.
【总页数】6页(P466-471)
【作者】汤亚波;徐守时
【作者单位】中国科学技术大学电子工程与信息科学系,安徽,合肥,230027;中国科学技术大学电子工程与信息科学系,安徽,合肥,230027
【正文语种】中文
【中图分类】TP751.1
【相关文献】
1.基于D-S证据理论的阵群目标数据关联算法 [J], 赵帮绪;杨宏文
2.基于D-S证据理论的无源航迹关联算法 [J], 颜坤玉;王杰贵;白日辉
3.基于证据理论的多特征联合数据关联算法研究 [J], 郑浩;王笛
4.基于证据理论的联合概率数据关联算法 [J], 康健;李一兵;林云;谢红
5.基于D-S证据理论的装备维修性多源数据融合方法 [J], 徐达;关矗;周诚
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DS证据理论的多源网络安全数据融合模型
现代电子技术Modern Electronics Technique2024年4月1日第47卷第7期Apr. 2024Vol. 47 No. 70 引 言市场监管领域中业务平台每天经过的流量大、涉及的域名多,在网络安全的防护过程中日志系统和警报系统每天都会产生大量的数据,难以分析和预处理。
同时,当今网络活动相当复杂,无论是单个入侵检测系统工作,还是多个入侵检测系统配合都容易出现误报、漏报和重复报警的问题,对于市场监管系统复杂的网络情况,难以快速准确地识别网络安全风险。
为减轻市场监管领域网络安全防控压力,本文提出一种基于异构日志和警报源的安全数据融合算法,利用DS (Dempster⁃Shafer )证据理论对攻击数据进行关联和融合,快速获取系统最关键的安全态势信息,辅助市场监管网络安全态势决策。
1 相关研究1.1 网络安全态势预测由于目前的网络环境复杂,网络安全形势非常严峻,并随着各个企业与部门对网络安全的关注程度不断基于DS 证据理论的多源网络安全数据融合模型黄智勇1,2, 林仁明2, 刘 宏2, 朱举异1, 李嘉坤1(1.电子科技大学 信息与软件工程学院, 四川 成都 610054;2.四川省市场监督管理局 信息中心, 四川 成都 610017)摘 要: 网络安全态势感知涉及大量的多源数据,其信息抽取难度高,是当前急需解决的问题。
文中结合现有的网络安全实践,针对流量传感器产生的数据,研究了基于DS 证据理论的多源网络安全数据融合方法。
该方法通过设计有效的融合模型,降低数据冗余性,实现关联性分析,并从时间、空间和事件等维度分析网络安全事件之间的关联性,形成关联后的融合数据,提高网络安全态势数据的有效性。
提出的融合模型不仅有效提取了关键信息,增强了网络安全态势数据的有效性,为网络安全监管提供了有力支持,而且在网络事件可能存在误报或漏报的情况下依然能够保持较高的有效性,具有重大的实际应用价值和推广意义。
基于D-S证据理论的多源信息融合方法在系留气球缆绳故障诊断中的应用研究
引言
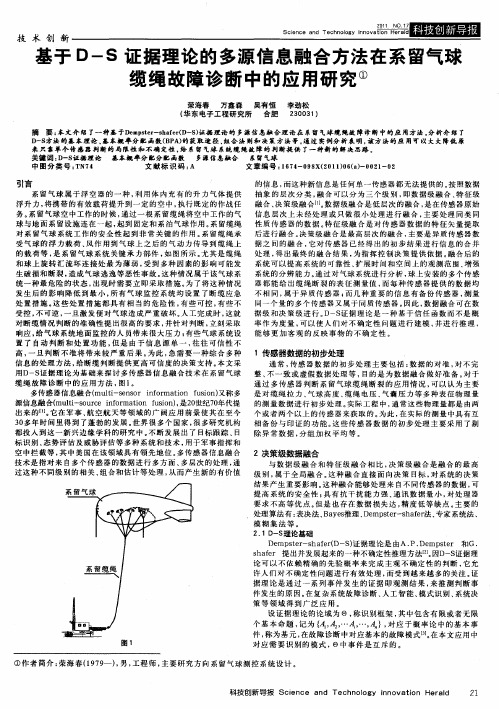
系 留气 球 属 于 浮 空 器 的一 种 , 用 体 内 充 有 的 升 力 气体 提 供 利 浮 升 力 , 携 带 的 有 效 载 荷 提 升 到 一定 的空 中 , 行 既 定 的作 战任 将 执 务 。 留 气球 空 中 工作 的 时 候 , 系 通过 一 根 系 留缆 绳 将 空 中工 作 的 气 球 与 地 面 系 留 设施 连 在 一 起 , 到 固 定 和 系 泊 气球 作 用 。 留 缆 绳 起 系 对 系 留气 球 系统 工 作 的 安 全 性 起 到 非 常 关 键 的 作 用 。 留缆 绳 承 系 受 气 球 的 浮 力载 荷 、 作 用 到 气 球 上 之 后 的 气 动 力 传 导 到 缆 绳 上 风 的 载 荷 等 , 系 留气 球 系统 关键 承 力 部 件 , 图所 示 。 其 是 缆 绳 是 如 尤 和球上旋转 汇流环连接处最为薄弱 , 受到 多 种 因 素 的 影 响 可 能发 生破 损和 断 裂 , 成 气球 逃 逸 等恶 性 事 故 。 种 情 况 属 于 该 气球 系 造 这 统一 种 最 危险 的状 态 , 现时 需 要 立 即采 取 措 施 。 了将 这种 情 况 出 为 发生 后 的 影 响 降 低 到 最 小 , 有 气 球 监 控 系统 均 设 置 了断 缆 应 急 所 处 置 措 施 。 些 处 置 措 施 都 具 有 相 当 的 危 险 性 , 些 可控 , 些 不 这 有 有 受控 , 不可 逆 , 旦 激发 便 对 气球 造 成 严 重 破 坏 。 工 完 成时 , 就 一 人 这 对 断 缆 情 况 判 断 的 准 确 性提 出很 高 的要 求 , 针 对 判断 , 刻 采 取 并 立 响应 , 气 球 系 统地 面监 控 的 人 员带 来 很 大 压 力 ; 些 气球 系统 设 给 有 置 了 自动 判 断 和 处 置 功 能 , 是 由于 信 息 源 单 一 , 往 可 信 性 不 但 往 高 , 旦 判 断 不 准 将 带 来 较 严 重 后 果 。 此 , 需 要 一 种 综 合 多种 一 为 急 信 息 的 处 理 方 法 , 断 缆 判 断 提 供 更 高 可 信 度 的 决 策 支持 。 文 采 给 本 用 D 证 据 理 论 为 基 础 来 探 讨 多 传 感 器 信 息 融 合技 术在 系 留 气球 —S 缆 绳 故 障 诊 断 中 的 应 用 方 法 , 1 图 。 多传 感 器信 息融 合( l - e s r i f r t n u i n 又称 多 mu t sn o n o ma i f s ) i o o 源信 息融 合( l — o re if r t n f s n , 2 世 纪7 年 代提 mut s u c n o ma i u i )是 0 i o o O 出 来 的 n。 在军 事 、 空航 天等 领域 的 广 阔 应 用 前 景 使 其 在 至 今 】它 航 3 多年 时 间里 得 到 了蓬 勃 的发 展 。 界 很 多 个 国 家 , 多 研 究 机构 0 世 很 都投 入 到这 一 新 兴 边 缘 学 科 的 研 究 中 。 断 发 展 出 了 目标 跟 踪 、 不 目 标 识 别 、 势 评 估 及 威 胁 评 估 等 多种 系统 和技 术 , 于 军 事 指 挥 和 态 用 空 中拦 截 等 , 中 美 国 在 该 领域 具 有 领 先 地 位 。 传 感 器 信 息 融 合 其 多 技 术 是 指 对 来 自多 个 传 感 器 的 数据 进 行 多 方面 、 多层 次 的 处 理 , 通 过这 种 不 同级 别的 相 关 、 合和 估计 等处 理 , 而 产 生 新 的 有价 值 组 从
《改进D-S证据理论的决策融合算法研究及应用》
《改进D-S证据理论的决策融合算法研究及应用》篇一一、引言在当今信息化时代,多源信息融合技术在决策支持系统、智能控制系统以及机器智能领域的应用日益广泛。
其中,决策融合算法作为多源信息融合的核心技术之一,对于提高决策的准确性和可靠性具有重要意义。
D-S(Dempster-Shafer)证据理论作为一种重要的决策融合算法,因其能够处理不确定性和不完全性信息而备受关注。
然而,传统的D-S证据理论在某些情况下仍存在融合精度不高、计算复杂度大等问题。
因此,本文旨在研究改进D-S证据理论的决策融合算法,并探讨其在实际应用中的效果。
二、D-S证据理论概述D-S证据理论是一种基于概率论的决策融合算法,通过将不同来源的证据进行融合,得到一个全局决策结果。
它能够处理不确定性和不完全性信息,具有一定的容错性和鲁棒性。
然而,传统的D-S证据理论在处理复杂问题时仍存在一些问题,如易陷入局部最优解、计算复杂度大等。
三、改进的D-S证据理论决策融合算法针对传统D-S证据理论的不足,本文提出了一种改进的决策融合算法。
该算法通过引入新的权重分配策略、优化基本概率分配函数以及采用多级融合策略等方法,提高了算法的融合精度和计算效率。
具体来说,我们的算法主要分为以下步骤:1. 权重分配策略:我们设计了一种基于证据可靠性的权重分配策略,根据不同来源证据的可靠性和重要性程度,为其分配不同的权重。
这样可以在一定程度上减少因不同来源证据质量差异导致的融合误差。
2. 优化基本概率分配函数:我们通过引入新的基本概率分配函数,对原始数据进行预处理和归一化处理,以减少数据噪声和冗余信息对融合结果的影响。
此外,我们还采用了概率平滑技术,以避免因某些事件的概率过于集中而导致的信息损失。
3. 多级融合策略:我们采用了多级融合策略,将原始数据进行多级融合处理。
这样可以更好地整合不同来源的信息,提高算法的容错性和鲁棒性。
在每一级融合过程中,我们都会根据上一步的融合结果进行下一级的权重分配和基本概率分配函数的调整。
《改进D-S证据理论的决策融合算法研究及应用》范文
《改进D-S证据理论的决策融合算法研究及应用》篇一一、引言决策融合算法在多源信息处理和决策支持系统中发挥着重要作用。
D-S(Dempster-Shafer)证据理论作为一种重要的决策融合方法,能够有效地融合来自不同信息源的数据,提高决策的准确性和可靠性。
然而,传统的D-S证据理论在处理复杂决策问题时仍存在一定局限性。
本文旨在研究改进D-S证据理论的决策融合算法,并探讨其在实际应用中的效果。
二、D-S证据理论概述D-S证据理论是一种基于概率的决策融合方法,通过将不同信息源的证据进行融合,得到一个综合的决策结果。
该方法具有简单、直观、易于实现等优点,在多源信息处理和决策支持系统中得到广泛应用。
然而,传统的D-S证据理论在处理复杂决策问题时,可能存在信息丢失、计算复杂度高、对先验概率敏感等问题。
三、改进D-S证据理论的决策融合算法针对传统D-S证据理论的局限性,本文提出一种改进的决策融合算法。
该算法通过引入新的信息度量方式、优化融合规则和降低计算复杂度等手段,提高决策融合的准确性和效率。
1. 引入新的信息度量方式:传统的D-S证据理论主要基于概率进行信息度量,容易受到主观因素的影响。
本文提出一种基于熵的信息度量方式,能够更准确地反映信息的价值和不确定性。
2. 优化融合规则:针对传统D-S证据理论中融合规则的局限性,本文提出一种基于加权平均的融合规则。
通过引入权重因子,对不同信息源的证据进行加权平均,以更好地反映各信息源的重要性和可靠性。
3. 降低计算复杂度:针对传统D-S证据理论计算复杂度高的问题,本文采用一些优化手段降低计算复杂度。
例如,通过减少迭代次数、优化数据结构、并行计算等方式,提高算法的计算效率。
四、改进D-S证据理论的应用改进的D-S证据理论在多个领域得到应用,如军事决策、智能系统、医疗诊断等。
本文以智能系统为例,探讨改进D-S证据理论在智能系统中的应用效果。
在智能系统中,多个传感器和算法可以提供关于同一目标的多种信息。
《基于DS证据理论的多传感器数据融合算法研究与应用》

《基于DS证据理论的多传感器数据融合算法研究与应用》篇一一、引言在众多复杂系统和智能技术中,数据扮演着至关重要的角色。
在现实生活中,很多场景都需要通过多传感器系统来获取和融合数据。
这些传感器可能会产生不同的数据类型和观点,如何有效地融合这些数据,提高系统的整体性能,就变得至关重要。
本文主要研究了基于DS(Dempster-Shafer)证据理论的多传感器数据融合算法。
通过分析该算法的理论基础,探究其在各种实际场景中的应用,以及面临的挑战和解决方案。
二、DS证据理论的基础DS证据理论是一种用于处理不确定性和不完全性问题的决策理论。
它通过组合多个证据或数据源的信息,来得出更全面、更准确的结论。
该理论基于概率论和信念函数,具有强大的数据处理能力。
在DS证据理论中,每个传感器或数据源都被视为一个独立的证据,它们提供的信息被视为一个假设空间中的不同假设的概率分布。
通过将这些概率分布进行组合,可以得到一个综合的假设概率分布,这就是我们所需的融合结果。
三、多传感器数据融合算法基于DS证据理论的多传感器数据融合算法主要包含以下几个步骤:1. 数据预处理:对各个传感器的数据进行清洗、转换和标准化处理,以便进行后续的融合处理。
2. 特征提取:从预处理后的数据中提取出有用的特征信息,这些特征信息将被用于后续的假设空间构建。
3. 假设空间构建:根据提取的特征信息,构建一个假设空间,每个假设对应一个可能的融合结果。
4. 概率分配:根据每个传感器或数据源提供的信息,将概率分配给每个假设。
这一步是DS证据理论的核心步骤。
5. 概率组合:通过DS组合规则,将各个传感器的概率分布进行组合,得到一个综合的假设概率分布。
6. 决策输出:根据综合的假设概率分布,得出最终的决策结果。
四、应用场景基于DS证据理论的多传感器数据融合算法在许多领域都有广泛的应用。
例如:1. 智能交通系统:通过融合来自摄像头、雷达、激光雷达等传感器的数据,提高车辆对环境的感知能力,从而提升交通系统的安全性和效率。
基于D—S证据理论的信息融合算法
f o r ma t i o n t o d e t e r mi n e t h e p r o b a b i l i t y i n h i g h l e v e l i n f o m a r t i o n f u s i o n . An d t h e a l g o r i t h m g i v e s t h e c o r r e c t i v e a l g o r i t h m
第 4 0卷 第 l 1 A期 2 0 1 3年 1 1 月
计
算
机
பைடு நூலகம்
科
学
Vo 1 . 4 0 No . 1 1 A
No v 2 01 3
Co mp u t e r S c i e n c e
基于 D - S证 据 理 论 的信 息 融合 算 法
江 涛
( 国家数 字交换 系统 工程技 术研 究 中心 NDS C 郑州 4 5 0 0 0 2 )
h i g h .
Ke y wo r d s I n f o r ma t i o n f u s i o n, D- S e v i d e n c e t h e o r y , Hi e r a r c h i c a l f u s i o n, Pr o i ma x t e c a l c u l a t i o n, E v i d e n c e c o n f l i c t
关键词 信息融合 , D - S证 据 理 论 , 层 次 式 融合 , 近似计算 , 证 据 冲 突 T N9 1 5 . 0 8 文献标识码 A 中图 法 分 类 号
I nf o r ma t i o n Fu s i o n Al g o r i t hm Ba s e d o n D- S Ev i d e n c e The o r y J I ANG Ta o
基于D-S证据理论的多传感器目标识别信息融合方法
冲突因子 k 客观地反 映了证 据间冲突 的程度 , 多传感 从 器 目标识别 系统角度来说 , 它代表各个传感 器所提供 信息的 冲突程度 , 如何处 理证据 问 的冲突 , 是运用 D S证据 理论准 - 确进 行 目标识 别 的关 键 。0 ≤1 当 =1时 , 表 两个证 ≤k , 代 据 间完全 冲突。D— S证据理 论通 过归 一 化因 子 ( 1一k 忽 ) 略了证据 问的冲突 , 但是 当信息 源之 问 的冲突非 常显著 时 , 其组合的最后结果可能产生有悖常理 的结论 。 例 1 设识 别框 架 为 H={ B, , 2个 证据 m A, C)有 和
, An C H
同类 的传感 器提供的信息加以综合 , 弥补 了单一传 感器 的局
A1n N A 1= A
限… 。多个传感器 中的信 息往 往含 有一定 的不确 定性 和模
糊性 , 甚至 由于传感器特性 的不一 , 同一个 目标 , 对 不同特性
其 中 , 为 冲 突 因 子 , 达 式 为 = A l, ∑nC H m A ) 表 , ( … ^
1 D- 据 推 理 理 论 S证
1 1 D S融 合 准 则 . —
D m s r 16 首 先 提 出 J 构 造 不 确 定 性 模 型 的 一 e pt 于 9 7年 e ,
m,A = 0 IlB) = 0O , ( ) =0 9 () ,/( T , . 1 m1 C .9 由式 ( ) — 1 D S组 合 规 则 计 算 得 : ( m A)=m( C)=0 , m( )=1 显然 这 个 结 论 是 不 合 理 的 , 为 2个 证 据 对 B 的 。 因
该 方 法 在 用 于 多 传 感 器 目标 识 别 系 统 的有 效 性 和 优 越 性 。
基于D-S证据理论的多传感器数据融合
基于D-S证据理论的多传感器数据融合崔智军;王庆春【期刊名称】《现代电子技术》【年(卷),期】2011(34)12【摘要】D-S证据理论可以有效地处理不确定信息,是有效的数据融合方法之一,但在证据高度冲突时,其归一化过程会产生有悖常理的结果.针对这个问题,国内外的学者提出了许多不同的改进方法,基本上可分为两类:修改组合规则和修改融合模型.在此总结分析了相关的国内外典型文献的改进思想,并进行系统务理的分析,为证据理论的发展和改进提供了有价值的参考.%D-S evidence method can effectively processing imperfect information, and is widely used in data fusion system.However, it involves counter-intuitive behavious when the high conflict infonnation exists. Generally there are two modification ideas: the modification of evidence sources and the modification of combination rules. The improved methods in typical literatures both here and abroad are analyzed. On the basis of general analysis and summary, some valuable reference for the development and improvement of evidence method are provided.【总页数】4页(P201-204)【作者】崔智军;王庆春【作者单位】安康学院,陕西安康725000;安康学院,陕西安康725000【正文语种】中文【中图分类】TN911-34【相关文献】1.D-S证据理论在多传感器数据融合中的应用 [J], 黄瑛;陶云刚;周洁敏;苏登军2.基于模糊证据理论的多传感器数据融合算法 [J], 璩晶磊;李少波;张成龙3.基于D-S证据理论的多传感器数据融合监控系统 [J], 赵立波;王平4.用D-S证据理论方法实现多传感器数据融合 [J], 孙慧影;张彦军;崔平远5.应用证据理论(D-S方法)解多传感器数据融合问题 [J], 宁云晖;田盛丰;宁培泰因版权原因,仅展示原文概要,查看原文内容请购买。
基于DS证据理论的多传感器数据融合方法研究
基于DS证据理论的多传感器数据融合方法研究基于DS证据理论的多传感器数据融合方法研究摘要:随着科学技术的快速发展,多传感器数据融合已成为极具潜力的研究领域。
本文旨在研究基于DS证据理论的多传感器数据融合方法,通过案例分析与实验验证,证明该方法的有效性和可行性。
1. 介绍多传感器数据融合是通过结合不同传感器获取的数据来提高系统性能和信息提取准确性的过程。
传统的数据融合方法主要基于概率论和统计学,但在面对模糊、不确定和矛盾信息时存在一定的局限性。
DS证据理论作为一种新兴的数据融合方法,能够有效地处理不确定和模糊信息,因此在多传感器数据融合中得到广泛的应用。
2. DS证据理论DS证据理论源于贝叶斯决策理论和Dempster-Shafer理论的发展,通过引入证据函数和信任度函数来描述不确定和模糊信息。
DS证据理论的核心思想是将不同证据的信任度进行组合,得到更为可靠的信息结果。
具体而言,DS证据理论包括证据提取、证据组合和决策三个重要步骤。
3. 多传感器数据融合方法基于DS证据理论的多传感器数据融合方法首先需要对各传感器进行校准和特征提取,以确保数据的准确性和可比性。
其次,对于每个传感器获取的数据,需要利用DS证据理论进行证据提取,将其转化为信任度函数。
然后,通过证据组合,将各个传感器的信任度进行融合,得到整体的信任度函数。
最后,基于融合后的信任度函数,可以进行决策和信息提取。
4. 案例分析为了验证基于DS证据理论的多传感器数据融合方法的有效性,选择了一个车辆目标跟踪的案例。
该案例中,利用了视频传感器和雷达传感器获得的车辆位置和速度信息。
首先,对两种传感器获取的数据进行校准和特征提取。
然后,通过DS证据理论进行证据提取,将车辆位置和速度的不确定性转化为信任度函数。
通过证据组合,将两个传感器的信任度进行融合得到目标跟踪的整体信任度函数。
最后根据整体信任度函数进行决策,完成车辆目标跟踪任务。
5. 实验验证为了评估基于DS证据理论的多传感器数据融合方法的性能,进行了一系列的实验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈尔滨工程大学本科毕业设计答辩毕设题目:基于证据理论的数据融合方法及DSP实现院(系所):信息与通信工程学院专业:通信工程姓名:郭静学号:2009021134指导老师:叶方副教授答辩日期:2013-06-22利用多传感器进行数据融合的必要性论文完成的主要内容基于kalman滤波单传感系统仿真基于D-S证据理论多传感系统仿真DSP硬件程序开发及结果分析系统的GUI可视化界面设计结论和展望k k k k W ΓX F X +=+1k kk k k V X H Z +=X 是k 时刻系统的n 维状态向量,Z 是系统的m 维观测向量,W 是p 维系统过程的噪声序列,V 是m 维观测噪声序列,F 是系统的状态转移矩阵,是过程演化噪声矩阵,H 是观测矩阵。
W ~ N(0,Q )V ~ N(0,R )Γ正态分布方差为,还与初始状态相互独立的为,均值也服从初状态二者000P X X 基于kalman 滤波单传感系统仿真kalman滤波算法:1.状态转移方程和观测方程建立四维跟踪模型单传感系统11111101000010001-----+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=k k k k k k k k k k vy y vx x T T vy y vx x W X kk k k k k k k vy y vx x y x VZ +⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=0100012.状态初始化R 、Q 、P 、X[]T3.042.050=X ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0.0100 0.0500 0.0100 0.0500 0.0500 0.2500 0.0500 0.2500 0.0100 0.0500 0.0100 0.0500 0.0500 0.2500 0.0500 0.2500 0P ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0.0001 0.0010 0.0001 0.0010 0.0010 0.0100 0.0010 0.0100 0.0001 0.0010 0.0001 0.0010 0.0010 0.0100 0.0010 0.0100 Q ⎥⎦⎤⎢⎣⎡= 0.1 0.01 0.01 0.1R 3.仿真结果(-6db)10203040506070809010051015202530X 真实值滤波值量测值10203040506070809010005101520253035Y 真实值滤波值量测值010********607080901000.020.030.040.05X 滤波方差值01020304050607080901000.020.030.040.05Y 滤波方差值010203040506070809010000.51X 量测误差X 滤波误差10203040506070809010000.51Y 量测误差Y 滤波误差均方误差对-6db 单传感系统X 滤波均方误差0.0441X 测量均方误差0.2655X 滤波改善效果 6.0141Y 滤波均方误差0.0441Y 测量均方误差0.2642Y 滤波改善效果 5.9852正弦波信号单传感系统1.状态转移方程和观测方程建立3)(=t f sintX+=XWkk-1=Z+XVkk2.状态初始化P=0.025,Q=0.2,R=0.1。
状态值X的初始值可设为0,取1000个点。
3.仿真结果(-6db)01002003004005006007008009001000-505真实值量测值1002003004005006007008009001000-505真实值滤波值10020030040050060070080090010000.0690.070.0710.0720.0730.0740.075滤波误差方差值100200300400500600700800900100000.20.40.60.81量测误差滤波误差均方误差-6db 单传感系统滤波均方误差0.1431测量均方误差0.2477滤波改善效果1.7301K 代表组合证据的冲突程度K-⨯=⊕∑=1)()()(2121ZY X Y mX m Z m m ∑∅=⨯=K Y X Y m X m )()(21m1:m1({B , F}) = 0.7 ,m1(Θ) = 0.3m2:m2({B}) = 0.9 ,m2(Θ) = 0.1m3:m3({B}) = 0.95 ,m3(Θ) = 0.05m 2({B}) = 0.9m 2(Q ) = 0.1m 1({B , F}) = 0.7{B} 0.63{ B , F } 0.07m 1(Q ) = 0.3{B} 0.27{Q }0.03基于D-S 证据理论多传感系统仿真m 1Åm ({B})0.90m 1Åm 2({B ,F})0.07m 1Åm 2({Q })0.03m 3({A}) = 0.950.8550.0665{A} 0.0285m 3(Q ) = 0.05{B} 0.045{B , F} 0.0035{Q }0.0015Κ= 0.855 + 0.0665 = 0.9215)(=∅m XA A q K A p A m ,),()()(∅≠**+=ε)1()()()(εε-+**+=K X q K X p X m 0)(=∅m ∅≠∀*+=A A q K A p A m ),()()(其中)()()(21jAB A iB m A m A p j i *=∑= ∑==21)(21)(i i A m A q Ke-=εKm(A)m(B)m(C)m(D)D-S 0.999010010Yeger 0.99901000.000990.99901孙全0.999010.3210.0030.1880.488李弼程0.999010.6260.00670.3673],,[C B A =Q 01.0)(,01.0)(,98.0)(:1111===C m B m A m m 99.0)(,01.0)(,0)(:2222===C m B m A m m 1.0)(,0)(,9.0)(:3333===C m B m A m m四维跟踪模型多传感系统1.状态转移方程和观测方程建立,状态初始化2.求各个传感器的信任值传感器1传感器2传感器3测量值7.70457.459 6.8765滤波值7.5095 6.9992 6.86传感器1传感器2传感器3测量mass值0.34960.33840.312滤波mass值0.35140.32760.3213.仿真结果传感器1传感器2传感器3信任值0.36800.33200.3000均方误差对-6db单传感系统对-8db单传感系统对-10db单传感系统X位置滤波均方误差0.04520.01940.0159 X数据融合均方误差0.00900.00750.0077X改善效果 5.0222 2.5789 2.0600Y位置滤波均方误差0.04520.01940.0159Y数据融合均方误差0.00930.00740.0076 Y改善效果 4.8602 2.6394 2.077801002003004005006007008009001000-505X 真实值滤波值1002003004005006007008009001000-4-2024X 真实值融合值均方误差对-6db 单传感系统对-8db 单传感系统对-10db 单传感系统滤波均方误差0.14100.09270.0585数据融合均方误差0.04960.05470.0539数据融合改善效果2.84271.69321.0850融合效果差由证据的冲突引起信噪比的降低证据冲突时算法改进的仿真结果01002003004005006007008009001000-505X 真实值DS 融合值1002003004005006007008009001000-505X 真实值冲突规则融合对-6db 单传感系统滤波均方误差0.1476数据融合均方误差0.0554冲突改进均方误差0.0552数据融合改进效果 2.6634冲突改进改善效果2.6719信噪比降低第501个点传感器1传感器2传感器3测量值0.1233-0.06820.0436-0.0188滤波值0.054-0.08910.0308第501个点传感器1传感器2传感器3信任值0.47290.43180.0953由于信噪比的降低,使得用数据归一化的方法产生mass值计算得到的信任值与实际传感器的信任不相符,解决的方法就是对最终得到的信任值进行权值的修正。
权值修正的仿真结果01002003004005006007008009001000-4-2024X 真实值DS 融合值01002003004005006007008009001000-4-2024X 真实值权值修正融合值均方误差对-6db 单传感系统对-8db 单传感系统对-10db 单传感系统滤波均方误差0.15390.09600.0541数据融合均方误差0.05390.05540.0496数据融合改善效果 2.8565 1.7321 1.0910权值修正均方误差0.03450.03270.0297权值修正改善效果 4.46592.93761.8195CCS程序开发•毕设中遇到的问题及解决方法•两个模型的单(多)传感系统开发1. DSP 存储空间问题软件使用注意事项CCS V5工程中会自带CMD 文件,只是给代码段、数据段等分配逻辑上的地址空间,需要手动分配堆和栈的实际物理空间,可以直接在CMD文件中加入下面两句代码:也可以在工程的properties 中的linker 中修改堆和栈的大小如下图-stack0x8000;-heap0x80002. 仿真器设置本课题中使用的是TMS320 C6416的开发板,仿真器使用的是Wintechdigital xds560 V2,在选好仿真器和开发板后要导入gel文件用来初始化DSP的cpu两个模型的单(多)传感系统开发从MATLAB 程序到C 语言程序的转化过程中,最繁琐的就是有关矩阵的处理,在MATLAB 中可以直接实现矩阵的加减乘和求逆、转置,函数的返回值也可以直接是一个矩阵。
而C 语言中函数只能返回一个值,对矩阵的运算只能通过数组来逐个进行。
1. 四维跟踪系统矩阵求逆*11A A A=-对二维方阵⎥⎦⎤⎢⎣⎡=d c b a A ⎥⎦⎤⎢⎣⎡--=a c b d *A bcad -=A矩阵乘法for(i=0;i<4;i++){for(j=0;j<2;j++){for(k=0;k<4;k++){cc[i][j]+=aa[i][k]*bb[k][j];}}}kalman函数返回值void kalman(float measure[],float x_ini[],float p_ini[][4])DSP 得到的数据在MATLAB 中的处理结果(-6db 系统)0102030405060708090100510152025 X 真实值滤波值融合值01020304050607080901005101520253035 Y 真实值滤波值融合值010203040506070809010000.51X 融合误差X 滤波误差010203040506070809010000.51 Y 融合误差Y 滤波误差对-6db 单传感系统(M)对-6db 单传感系统(DSP)X 位置滤波均方误差0.04520.0496X 数据融合均方误差0.00900.0092X 改善效果 5.0222 5.3913Y 位置滤波均方误差0.04520.0496Y 数据融合均方误差0.00930.0092Y 改善效果 4.86025.39132. 正弦波信号DSP 得到的数据在MATLAB 中的处理结果(-6db 系统)050100150200250300350400450500-505真实值滤波值050100150200250300350400450500-505真实值融合值对-6db 单传感系统(M)对-6db 单传感系统(DSP)滤波均方误差0.14100.1502数据融合均方误差0.04960.0528改善效果 2.8427 2.8447系统GUI 可视化界面设计•控件的handles使用很关键•各控件的tag,编辑框的string,Axes的nextplot属性❿plot(handles.plot1,x_true(1,:),'r');set(handles.plot1, 'NextPlot', 'add')set(handles.plot1, 'NextPlot', 'replace')❿set(handles.Xsm,'String',num2str(X_meas_mean_squ) );❿四维跟踪系统是一个线性动态系统,信噪比较高,其滤波效果和融合效果都很好,就均方误差而言滤波值比起测量值改善了6倍左右,融合值比起滤波值改善了5倍左右(-6db单传感系统)。