自动控制原理结构图及等效变换
合集下载
自动控制原理方框图

[注意]:
相临的信号相加点位置可以互换;见下例
X1(s)
X2(s)
X3(s)
Y (s)
X1(s)
X3(s)
X 2 (s)
Y (s)
同一信号的分支点位置可以互换:见下例
X1(s)
X (s) G(s) Y (s)
X 2 (s)
X (s) G(s) Y (s)
X 2 (s)
X1(s)
相加点和分支点在一般情况下,不能互换。
§2-3 控制系统的结构图与信号流图
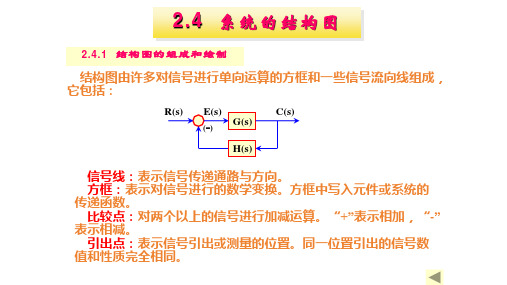
一、结构图的组成和绘制
1、结构图的组成 由四种基本图形符号组成
(1)函数方块
R(s) r(t) G(s)
C(s) c(t)
(2)信号线
R(s) r(t)
(3)分支点(引出点)
R(s) r(t)
R(s) r(t) R(s) r(t)
(4)综合点(比较点或相加点)
R(s)
R
R1Cs
2I
2
(s)
UI (cs)(s)
R2
R1
Uc (s)
U c (s)
I1 (s)
Uc (s)
几点说明:
(1)在结构图中,每一个方框中的传递函数都应是考虑了负 载效应后的传递函数。
(2)描述一个系统的结构图不是唯一的,选择不同的中间变 量得到不同的结构图;
(3)结构图中的方框与实际系统的元部件并非一定是一一对 应的;
X1(s) G(s) X2(s) N(s)
Y (s)
N(s) ? Y (s) [X1(s) X 2 (s)]G(s), 又 : Y (s) X (s)1G(s) X 2 (s)N(s), N(s) G(s)
把相加点从环节的输出端移到输入端:
自动控制原理控制系统的结构图

比较点后移
R(s)
G(s)
比较点前移
+
Q(s)
C(s)
R(s)
+
C(s) G(s)
比较点后移
Q(s)
R(s)
+
C(s) G(s)
Q(s)
C(s) R(s)G(s) Q(s)
[R(s) Q(s) ]G(s) G(s)
R(s)
C(s) G(s)
+
Q(s)
G(s)
C(s) [R(s) Q(s)]G(s)
R(s)G(s) Q(s)G(1s6 )
(5)引出点旳移动(前移、后移)
引出点前移
R(s)
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
将 C(s) E(s)G(s) 代入上式,消去G(s)即得:
E(s) R(s)
1
H
1 (s)G(s)
1
1 开环传递函数
31
N(s)
+ E(s)
++
C(s)
R(s)
G1(s)
G2 (s)
-
B(s)
H(s)
(1)
打开反馈
C(s) R(s)
1
G(s) H (s)G(s)
前向通路传递函数 1 开环传递函数
注意:进行相加减旳量,必须具有相同旳量纲。
X1 +
+
X1+X2 R1(s)
自动控制原理(2-2)
1 G(s)
B A
B
+
+
C
D
A
+
C
+
D
(a)
(b)
图2-17 相邻相加点的移动
A A
(a)
A A
A A
A A(b)AA源自图2-18 相邻分支点的移动
应当指出,在结构图简化过程中,两个相邻的相加
点和分支点不能轻易交换。 总之,根据实际系统中各环节(子系统)的结构图 和信息流向,可建立系统的结构图。在确定输入量
加,就可得到系统的总输出量。
系统对扰动N(s)的响应CN(s)为:
G2 ( s) CN ( s ) N ( s) 1 G1 ( s)G2 ( s) H ( s)
系统对参考输入量R(s)的响应CR(s)为:
G1 ( s )G2 ( s ) CR ( s ) R( s) 1 G1 ( s )G2 ( s ) H ( s )
X 3 ( s)
X 0 (s)
G1 ( s )G2 ( s )G3 ( s)
(b)
X 3 ( s)
图2-10 串联环节的简化
n个环节(每个环节的传递函数为Gi(s) ,i=1,2,3,…) 串联的等效传递函数等于各传递函数相乘。
G( s) G1 (s)G2 (s) Gn (s)
2.并联环节的简化
上式就是系统输出量C(s)和输入量R(s)之间的传递函 数,称为闭环传递函数。
闭环传递函数将闭环系统的动态特性与前向通道环 节和反馈通道环节的动态特性联系在一起。
G( s) C (s) R( s ) 1 G( s) H ( s)
可见,闭环系统的输出量取决于闭环传递函数和输 入量的性质。
自动控制原理第二章3
Uc(s)
第三节控制系统的结构图和信号流图
N(s) R(s) C(s) G1(s) G2(s)
+ _
H(s) 典型反馈控制系统方框图 1)信号线:带单向箭头,表示信号流向 信号线:带单向箭头, 2)引出点:信号从引出点分开,大小和性质相同 引出点:信号从引出点分开, 3)比较点:两个或两个以上的信号相加减 比较点: 4)方框:对信号进行数学变换,方框中写入环节的传递函数 方框:对信号进行数学变换,
R1 C2S 1 C(S) 1 1 R2 +R1C R2 +1)C2S C2S2S
R(s)
_
1 R1C1S+1 R1C2S
1 R2C2S+1
C(s)
第三节控制系统的结构图和信号流图
三、控制系统的信号流图: 控制系统的信号流图:
1、定义 、 一组线性代数方程式变量间传递关系的图形表示, 一组线性代数方程式变量间传递关系的图形表示,由节 支路和支路增益组成。 点、支路和支路增益组成。 y1 典型的信号流图 x1 1 x2 a e a y2=ay1 d x3 b f x4 c x5 g 1 x6 y2
第三节控制系统的结构图和信号流图
绘制动态结构图的一般步骤为: 绘制动态结构图的一般步骤为 (1)确定系统中各元件或环节的传递函数。 )确定系统中各元件或环节的传递函数。 (2)绘出各环节的方框,方框中标出其传 )绘出各环节的方框, 递函数、输入量和输出量。 递函数、输入量和输出量。 (3)根据信号在系统中的流向,依次将各 )根据信号在系统中的流向, 方框连接起来。 方框连接起来。
p1 = abc
L1与L3
p2 = d
L3 = g L2与L3
L1 = ae
L2 = bf
第三节控制系统的结构图和信号流图
N(s) R(s) C(s) G1(s) G2(s)
+ _
H(s) 典型反馈控制系统方框图 1)信号线:带单向箭头,表示信号流向 信号线:带单向箭头, 2)引出点:信号从引出点分开,大小和性质相同 引出点:信号从引出点分开, 3)比较点:两个或两个以上的信号相加减 比较点: 4)方框:对信号进行数学变换,方框中写入环节的传递函数 方框:对信号进行数学变换,
R1 C2S 1 C(S) 1 1 R2 +R1C R2 +1)C2S C2S2S
R(s)
_
1 R1C1S+1 R1C2S
1 R2C2S+1
C(s)
第三节控制系统的结构图和信号流图
三、控制系统的信号流图: 控制系统的信号流图:
1、定义 、 一组线性代数方程式变量间传递关系的图形表示, 一组线性代数方程式变量间传递关系的图形表示,由节 支路和支路增益组成。 点、支路和支路增益组成。 y1 典型的信号流图 x1 1 x2 a e a y2=ay1 d x3 b f x4 c x5 g 1 x6 y2
第三节控制系统的结构图和信号流图
绘制动态结构图的一般步骤为: 绘制动态结构图的一般步骤为 (1)确定系统中各元件或环节的传递函数。 )确定系统中各元件或环节的传递函数。 (2)绘出各环节的方框,方框中标出其传 )绘出各环节的方框, 递函数、输入量和输出量。 递函数、输入量和输出量。 (3)根据信号在系统中的流向,依次将各 )根据信号在系统中的流向, 方框连接起来。 方框连接起来。
p1 = abc
L1与L3
p2 = d
L3 = g L2与L3
L1 = ae
L2 = bf
自动控制原理 控制系统的结构图

其他变化(比较点的移动、引出点的移动)以此三种 基本形式的等效法则为基础。
12
(1)串联连接
R( s )
U (s) 1
G (s) 1
G (s) 2
C( s )
R(s)
C(s)
G(s)
(a)
(b)
特点:前一环节的输出量就是后一环节的输入量
U1(s) G1(s)R(s) C(s) G2 (s)U1(s) G2 (s)G1(s)R(s)
注意:进行相加减的量,必须具有相同的量纲。
X1 +
+
X1+X2 R1(s)
-
R1(s)R2(s)
X1
X2
R2(s)
X3
X1-X2 +X3 -
X2
4
(4) 引出点(分支点、测量点) 表示信号测量或引出的位置
R(s)
G (s) 1
X(s)
G (s) 2
C(s)
X(s) 引出点示意图
注意:同一位置引出的信号大小和性质完全一样
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
C(s) R(s)
G1(s)G2
(s)
G(s)
结论:
n
G(s) Gi (s) n为相串联的环节数 i 1
串联环节的等效传递函数等于所有传递函数的乘积
13
(2)并联连接
G1 (s)
12
(1)串联连接
R( s )
U (s) 1
G (s) 1
G (s) 2
C( s )
R(s)
C(s)
G(s)
(a)
(b)
特点:前一环节的输出量就是后一环节的输入量
U1(s) G1(s)R(s) C(s) G2 (s)U1(s) G2 (s)G1(s)R(s)
注意:进行相加减的量,必须具有相同的量纲。
X1 +
+
X1+X2 R1(s)
-
R1(s)R2(s)
X1
X2
R2(s)
X3
X1-X2 +X3 -
X2
4
(4) 引出点(分支点、测量点) 表示信号测量或引出的位置
R(s)
G (s) 1
X(s)
G (s) 2
C(s)
X(s) 引出点示意图
注意:同一位置引出的信号大小和性质完全一样
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
C(s) R(s)
G1(s)G2
(s)
G(s)
结论:
n
G(s) Gi (s) n为相串联的环节数 i 1
串联环节的等效传递函数等于所有传递函数的乘积
13
(2)并联连接
G1 (s)
自动控制原理--系统的结构图
R(s)
C(s)
G(s)
(-)
B(s)
R(s) G(s)
B(s) G(s)
C(s) (-)
•相 加 点 的 移 动
3. 交换或合并相加点
C(s)=E1(s)+V2(s) = R(s)-V1(s)+V2(s) = R(s)+V2(s)-V1(s)
V2(s)
R(s)
E1(s)
C(s)
(-) V1(s)
系统动态结构图
定义:将系统中所有的环节用方框图表示, 图中标明其传递函数,并且按照在系统中各 环节之间的联系,将方框图连接起来。
系统动态结构图的绘制步骤:
● (1)首先按照系统的结构和工作原理,分解出各环 节并写出它的传递函数。
● (2)绘出各环节的动态方框图,方框图中标明它的 传递函数,并以箭头和字母符号表明其输入量和输 出量,按照信号的传递方向把各方框图依次连接起 来,就构成了系统结构图。
C(s)
G(s)
R(s)
1 G(s)H(s)
• 例2.9
R(s) G1(s)
G2(s)
(-)
G3(s)
(-)
C(s) G6(s)
G4(s) G5(s)
G 236 (G 2 G 3 )G 6
G 54 G 5 G 4
G
1
G 236 G 236G 54
G1
● 比较点和引出点的移动: 等效原则:前向通道和反馈通道传递函数都不变。
G4
(a)
(b)
•其 它 等 价 法 则
1. 等效为单位反馈系统
R(s)
C(s)
G(s)
(-)
H(s)
R(s) 1
2.3自动控制原理

自动控制原理
自动控制原理
自动控制原理
2.4 系统结构图的变换和简化
等效变换的原则:变换前后的变量之间关系保持不变 一、典型连接的等效传递函数
(1)串联等效 R(s) U (s) C (s) G1 ( s) G 2
G1 ( s)G 2 ( s)
C (s)
G1 ( s )
自动控制原理
三 信号流图
3.1信号流图的常用术语 : 节点:用以表示变量或信号的点称为节点,用 “o”表示。 传输:两节点间的增益或传递函数称为传输。 支路:连接两节点并标有信号流向的定向线段 支路的增益即为传输。 源点:只有输出支路而无输入支路的节点(与 系统的输入信号相对应)。
x1 a x2 c b x3 1 x4
X2 X3
相加点前移,在移动支路中串入所越过的传递函数的倒 数方框 (2) 相加点后移
x1 x3 x2 x1 x3 G(s) G(s) x2
G(s)
相加点后移,在移动支路中串入所越过的传递函数方框。
自动控制原理
3.方框图的简化原则
(1) 前向通道中各串联函数方框的传函乘积保持不变 ; (2) 各反馈回路所含函数方框的传函之积保持不变。
G(s)
C (s)
C(s) G(s)E(s) G(s)[R(s) B(s)] G(s)R(s) G(s)H (s)C(s)
R(s) G (s) C (s) R( s) ( s) R( s) 1 G ( s) H (s)
H (s)
G (s) 1 G (s) H (s)
不存在互不接触回路 1 ( L1 L2 L3 L4 L5 ) 1 G1G 2 H 1 G1G 2 G 3 G 2 G 3 H 2 G 4 H 2 G1G 4 五个回路均与 1 和P2 接触 P 1 1 2 1 C(S) 1 P P1 1 P2 2 R(S) G 1G 2 G 3 G 1G 4 1 G1G 2 H 1 G1G 2 G 3 G 2 G 3 H 2 G 4 H 2 G1G 4
自动控制原理控制系统的结构图
I1(s)
I2 (s)
CR1s
7
i2
C
i
i1 R1
ui
R2
uo
(3)
I(s) I1(s) I2 (s)
I2 (s)
I (s)
I1(s)
(4)U o (s) R2 I (s)
I (s)
Uo (s)
R2
8
(1)Ui (s)
(3)
- Uo(s)
I2 (s)
(2)
1
I1(s)
I1(s)
I2 (s)
- Uo (s)
(d)
将图(b)和(c)组合起来即得到图(d),图(d)为该 一阶RC网络的方框图。
11
2.3.3 系统结构图的等效变换和简化
为了由系统的方框图方便地写出它的闭环传递函 数,通常需要对方框图进行等效变换。
方框图的等效变换必须遵守一个原则,即: 变换前后各变量之间的传递函数保持不变
在控制系统中,任何复杂系统的方框图都主要由 串联、并联和反馈三种基本形式连接而成。
u
o
idt c
对其进行拉氏变换得:
I (s)
U
o
(s)
U
i (s)
I (s) sC
U R
o
(s)
(1) (2)
10
I (s)
U
o
(s)
U
i (s)
I (s) sC
U R
o
(s)
(1) (2)
Ui (s)
I(s)
(b)
Uo (s)
I(s)
(c)
Uo (s)
Ui (s)
I(s)
Uo (s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K2 (s
1)
ua (s) u2 (s)
K3
u1(s) K2(s 1) u2 (s)
u2(s)K3 ua (s)
Wednesday, November 18, 2020
3
反馈环节:
u f (s) (s)
K
f
(s)
Kf
u f (s)
电动机环节: 返回例2-6
(Tms 1)(s) Kuua (s) KmMc (s)
相加点和分支点在一般情况下,不能互换。
X (s)
Xቤተ መጻሕፍቲ ባይዱ3 (s)
G(s)
X (s)
X 3 (s)
G(s)
X 2 (s)
X 2 (s)
所以,一般情况下,相加点向相加点移动,分支点向分支
点移动。
Wednesday, November 18, 2020
12
结构图的化简, 应注意以下两点:
1. 化简的关键是解除环路与环路的交叉,或形成大环套小环的 形式.
把相加点从环节的输入端移到输出端
X1(s) X2(s)
G(s) Y (s)
Wednesday, November 18, 2020
X1(s) G(s) X 2(s) N(s)
N(s) G(s)
Y (s)
8
信号相加点的移动和互换
把相加点从环节的输出端移到输入端:
X1(s) G(s) X 2 (s)
第三节 结构图及其等效变换
Wednesday, November 18, 2020
1
结构图的基本概念
一、结构图的基本概念:
我们可以用方块图表示系统的组成和信号流向。在引入传 递函数后,可以把环节的传递函数标在方块图的方块里,并把 输入量和输出量用拉氏变换表示。这时Y(s)=G(s)X(s)的关系可 以在结构图中体现出来。
X (s) G1(s) …
Y (s) Gn (s)
环节的并联:
G1 ( s )
X (s)
Y (s)
G(s)
Y (s) X (s)
n i 1
Gi (s)
反馈联接:
X (s) E(s) G(s) Y (s)
Gn (s)
Y (s) E(s)G(s)
H (s)
Y (s) n
G(s) X (s) i1 Gi (s)
2
结构图的基本概念
[例2-10]求例2-5所示的速度控制统的结 构图。各部分传递函数见例2-6.
比较环节:
ue (s) ug (s) u f (s)
ug (s) ue (s) u f (s)
运放Ⅰ:
u1 ( s) ue (s)
K1,
ue (s) K1 u1(s)
运放Ⅱ:
功放环节:
u2 (s) u1(s)
Wednesday, November 18, 2020
E(s) X (s) H (s)Y (s),
G(s)
Y (s) X (s)
1
G(s) G(s)H (s)
7
信号相加点的移动
(二)信号相加点和分支点的移动和互换:
如果上述三种连接交叉在一起而无法化简,则要考虑移动某 些信号的相加点和分支点。 ①信号相加点的移动:
Mc (s)
Km Tms 1
Ua (s)
Ku Tms 1
- (s)
将上面几部分按照逻辑连接起来,形成下页所示的完 整结构图。
Wednesday, November 18, 2020
4
结构图的基本概念
M c (s) Km (Tas 1)
TaTms Tms 1
ug (s)
ue (s)
K1
u1(s) K2(s 1) u2 (s)
K3
ua (s)
Ku TaTms Tms 1
u f (s)
Kf
- (s)
在结构图中,不仅能反映系统的组成和信号流向,还能表 示信号传递过程中的数学关系。系统结构图也是系统的数学模 型,是复域的数学模型。
Wednesday, November 18, 2020
5
结构图的等效变换
二、结构图的等效变换:
Y (s)
X1(s)
X2(s) N(s)
G(s) Y (s)
N(s) ? Y (s) X1(s)G(s) X 2(s), Y (s) X1(s)G(s) X 2(s)N(s)G(s), N(s) 1
G(s)
Wednesday, November 18, 2020
9
信号分支点的移动和互换
X3(s)
Y (s)
X1(s)
X3(s)
X 2 (s)
Y (s)
Wednesday, November 18, 2020
11
信号相加点和分支点的移动和互换
同一信号的分支点位置可以互换:见下例
X1(s)
X (s) G(s) Y (s)
X 2 (s)
X (s) G(s) Y (s)
X 2 (s)
X1(s)
2. 解除交叉连接的有效方法是移动相加点或分支点.
Wednesday, November 18, 2020
13
结构图等效变换例子||例2-11
[例2-11]利用结构图等效变换讨论两级RC串联电路的传递函数。
R1
R2
ui
i1
i, u
C1i2 C2
[解]:不能把左图简单地看成两个
i2
uo
[定义]:表示变量之间数学关系的方块图称为动态结构图或结 构图。
[例]:结构: X(t) 放大器 结Y(构t) 图:
X(s)
Y(s)
G(s)=K
微分方程:y(t)=kx(t)
若已知系统的组成和各部分的传递函数,则可以画出各个部 分的结构图并连成整个系统的结构图。
Wednesday, November 18, 2020
分支点从环节的输出端移到输入端:
X1(s) G(s) Y (s) Y (s)
X1(s) G(s) Y (s) N(s) Y (s)
N(s) ? X1(s)G(s) Y(s), X1(s)N(s) Y(s),N(s) G(s)
[注意]:
相临的信号相加点位置可以互换;见下例
X1(s)
X2(s)
②信号分支点的移动: 分支点从环节的输入端移到输出端
X1(s) G(s) Y (s)
X1(s)
X1(s) G(s)
Y (s)
N(s) X1(s)
N(s) ?
X1(s)G(s)N (s)
X1(s), N (s)
1 G(s)
Wednesday, November 18, 2020
10
信号相加点和分支点的移动和互换
[定义]:在结构图上进行数学方程的代数运算。 [原则]:变换前后环节的数学关系保持不变。
[类型]:①环节的合并; --串联 --并联 --反馈连接
②信号分支点或相加点的移动。
Wednesday, November 18, 2020
6
环节的合并
(一)环节的合并:有串联、并联和反馈三种形式。
环节的串联: