基于ARM的汽车安全气囊控制系统设计
基于MATLAB的汽车动力性仿真分析毕业设计任务书

指导教师签字 负责教师签字
年 年
月 月
日 日
二级学院 专 班 学 业 级 生
机电工程学院
车辆工程
指导教师 负责教师
毕 业 设 计 (论 文 )任 务 书
毕业设计(论文)任务书毕业设计(论文)题目
基于 MATLAB 的汽车动力性仿真分析 毕业设计(论文)时间 2014 年 毕业设计(论文)进行地点 毕业设计(论文)内容及要求: (一)主要内容 1.根据所给参数,运用 MATLAB 软件绘制该车各项性能曲线。 2.运用汽车设计、汽车理论等相关知识,根据所绘曲线分析汽车各项性能。 3.利用 MATLAB 软件编制图形界面,实现界面输入参数,即完成部分曲线的自 动绘制。 4 .撰写设计说明书和英文资料翻译。 设计所需参数: 汽油发动机使用外特性的 Tq—n 曲线的拟合公式为 月 日至 2014 年 月 日
式
传动系机械效率 波动阻力系数 空气阻力系数×迎风面积 主减速器传动比 飞轮转功惯量 二前轮转动惯量 四后轮转功惯量 变速器传动比
η т =0.85 f=0.013 CDA=2.77 i0=5.83 If=0.218kg• Iw1=1.798kg• Iw2=3.598kg• ig(数据如下表)
轴距 质心至前铀距离(满载) 质心高(满载) (二)基本要求
机电工程学院
n n 2 n 3 n 4 Tq 19.13 295 .27( ) 165 .44( ) 40.874( ) 3.8445( ) 1000 1000 1000 1000
中, Tq 为发功机转矩(N•m);n 为发动机转速(r/min)。 发动机的最低转速 nmin=600r/min ,最高转速 nmax=4000 r/min 装载质量 整车整备质量 总质量 车轮半径 2000kg 1800kg 3880 kg 0.367 m
安全气囊控制模块 工作原理
安全气囊控制模块工作原理
安全气囊控制模块是一种电子控制单元,用于控制车辆的安全气囊系统。
它的工作原理如下:
1. 检测撞击:安全气囊控制模块通过安装在车辆中的各种传感器来检测车辆是否发生了碰撞或撞击。
传感器可以包括加速度传感器、车辆碰撞传感器等。
2. 信号处理:一旦传感器监测到碰撞或撞击事件,它会将相应的信号发送给安全气囊控制模块。
安全气囊控制模块会对接收到的信号进行处理和分析,以确定是否需要激活安全气囊系统。
3. 决策逻辑:根据处理后的信号,安全气囊控制模块会根据预设的决策逻辑来判断是否需要部署安全气囊。
决策逻辑可以包括判断碰撞的严重程度、车辆的速度、是否有乘客等因素。
4. 激活安全气囊:如果安全气囊控制模块判断需要部署安全气囊,它会通过车辆电气系统发送信号给相应的安全气囊装置。
安全气囊装置接收到信号后会迅速充气,填充气囊,以保护车辆乘客免受碰撞产生的冲击。
5. 事件记录:安全气囊控制模块还可以记录与碰撞相关的数据,如撞击强度、车速、安全气囊是否正常部署等信息,以供事故调查和保险索赔等用途。
总的来说,安全气囊控制模块通过检测车辆的碰撞事件,并且
根据事先设定的决策逻辑来决定是否部署安全气囊,以确保车辆乘客在碰撞事故中得到保护。
NXPS32K11632位ARMMCU通用汽车应用解决方案
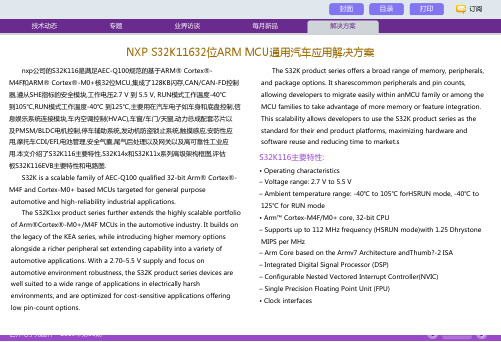
nxp公司的S32K116是满足AEC-Q100规范的基于ARM® Cortex®-M4F和ARM® Cortex®-M0+核32位MCU,集成了128KB闪存,CAN/CAN-FD控制器,遵从SHE指标的安全模块,工作电压2.7 V 到 5.5 V, RUN模式工作温度-40℃到105℃,RUN模式工作温度-40℃到125℃,主要用在汽车电子如车身和底盘控制,信息娱乐系统连接模块,车内空调控制(HVAC),车窗/车门/天窗,动力总成配套芯片以及PMSM/BLDC电机控制,停车辅助系统,发动机防盗锁止系统,触摸感应,安防性应用,摩托车CDI/EFI,电池管理,安全气囊,尾气后处理以及网关以及高可靠性工业应用.本文介绍了S32K116主要特性,S32K14x和S32K11x系列高级架构框图,评估板S32K116EVB主要特性和电路图.S32K is a scalable family of AEC-Q100 qualified 32-bit Arm® Cortex®-M4F and Cortex-M0+ based MCUs targeted for general purposeautomotive and high-reliability industrial applications.The S32K1xx product series further extends the highly scalable portfolio of Arm®Cortex®-M0+/M4F MCUs in the automotive industry. It builds on the legacy of the KEA series, while introducing higher memory optionsalongside a richer peripheral set extending capability into a variety ofautomotive applications. With a 2.70–5.5 V supply and focus onautomotive environment robustness, the S32K product series devices are well suited to a wide range of applications in electrically harshenvironments, and are optimized for cost-sensitive applications offeringlow pin-count options.The S32K product series offers a broad range of memory, peripherals, and package options. It sharescommon peripherals and pin counts,allowing developers to migrate easily within anMCU family or among the MCU families to take advantage of more memory or feature integration. This scalability allows developers to use the S32K product series as the standard for their end product platforms, maximizing hardware andsoftware reuse and reducing time to market.sS32K116主要特性:• Operating characteristics– Voltage range: 2.7 V to 5.5 V– Ambient temperature range: -40℃ to 105℃ forHSRUN mode, -40℃ to 125℃ for RUN mode• Arm™ Cortex-M4F/M0+ core, 32-bit CPU– Supports up to 112 MHz frequency (HSRUN mode)with 1.25 Dhrystone MIPS per MHz– Arm Core based on the Armv7 Architecture andThumb?-2 ISA– Integrated Digital Signal Processor (DSP)– Configurable Nested Vectored Interrupt Controller(NVIC)– Single Precision Floating Point Unit (FPU)• Clock interfacesNXP S32K11632位ARM MCU通用汽车应用解决方案– 4 - 40 MHz fast external oscillator (SOSC) with upto 50 MHz DC external square input clock inexternal clock mode– 48 MHz Fast Internal RC oscillator (FIRC)– 8 MHz Slow Internal RC oscillator (SIRC)– 128 kHz Low Power Oscillator (LPO)– Up to 112 MHz (HSRUN) System Phased LockLoop (SPLL)– Up to 20 MHz TCLK and 25 MHz SWD_CLK– 32 kHz Real Time Counter external clock(RTC_CLKIN)• Power management– Low-power Arm Cortex-M4F/M0+ core withexcellent energy efficiency– Power Management Controller (PMC) with multiplepower modes: HSRUN, RUN, STOP, VLPR, andVLPS. Note: CSEc (Security) or EEPROM writes/erase will trigger error flags in HSRUN mode (112MHz) because this use case is not allowed toexecute simultaneously.The device will need toswitch to RUN mode (80 Mhz) to execute CSEc(Security) or EEPROM writes/erase.– Clock gating and low power operation supported onspecific peripherals.• Memory and memory interfaces– Up to 2 MB program flash memory with ECC– 64 KB FlexNVM for data flash memory with ECCand EEPROM emulation. – Up to 256 KB SRAM with ECC– Up to 4 KB of FlexRAM for use as SRAM orEEPROM emulation Note: CSEc (Security) orEEPROM writes/erase will trigger error flagsinHSRUN mode (112 MHz) because this use case isnot allowed to execute simultaneously. The devicewill need to switch to RUN mode (80 MHz)toexecute CSEc (Security) or EEPROM writes/erase.– Up to 4 KB Code cache to minimize performanceimpact of memory access latencies– QuadSPI with HyperBus™ support• Mixed-signal analog– Up to two 12-bit Analog-to-Digital Converter(ADC) with up to 32 channel analog inputs permodule– One Analog Comparator (CMP) with internal 8-bitDigital to AnalogConverter (DAC)• Debug functionality– Serial Wire JTAG Debug Port (SWJ-DP) combines– Debug Watchpoint and Trace (DWT)– Instrumentation Trace Macrocell (ITM)– Test Port Interface Unit (TPIU)– Flash Patch and Breakpoint (FPB) Unit• Human-machine interface (HMI)– Up to 156 GPIO pins with interrupt functionality– Non-Maskable Interrupt (NMI)• Communications interfaces– Up to three Low Power Universal Asynchronous Receiver/Transmitter(LPUART/LIN) modules with DMA supportand low power availability– Up to three Low Power Serial Peripheral Interface (LPSPI) modules with DMA support and low power availability– Up to two Low Power Inter-Integrated Circuit (LPI2C) modules with DMA support and low power availability– Up to three FlexCAN modules (with optional CAN-FD support)– FlexIO module for emulation of communication protocols and peripherals (UART, I2C, SPI, I2S, LIN, PWM, etc).– Up to one 10/100Mbps Ethernet with IEEE1588 support and twoSynchronous Audio Interface (SAI) modules.• Safety and Security– Cryptographic Services Engine (CSEc) implements a comprehensive set of cryptographic functions as described in theSHE (Secure HardwareExtension) Functional Specification. Note: CSEc (Security) or EEPROMwrites/erase willtrigger error flags in HSRUN mode (112 MHz) because this use case is not allowed to execute simultaneously.Thedevice will need to switch to RUN mode (80 MHz) to execute CSEc(Security) or EEPROM writes/erase.– 128-bit Unique Identification (ID) number– Error-Correcting Code (ECC) on flash and SRAM memories– System Memory Protection Unit (System MPU)– Cyclic Redundancy Check (CRC) module– Internal watchdog (WDOG)– External Watchdog monitor (EWM) module• Timing and control– Up to eight independent 16-bit FlexTimers (FTM) modules, offering up to 64 standard channels (IC/OC/PWM)– One 16-bit Low Power Timer (LPTMR) with flexible wake up control– Two Programmable Delay Blocks (PDB) with flexible trigger system– One 32-bit Low Power Interrupt Timer (LPIT) with 4 channels– 32-bit Real Time Counter (RTC)• Package– 32-pin QFN, 48-pin LQFP, 64-pin LQFP, 100-pin LQFP, 100-pin MAPBGA, 144-pin LQFP, 176-pin LQFP packageoptions• 16 channel DMA with up to 63 request sources usingDMAMUXapplications, which include but not limited to:• Exterior and interior lighting• HVAC• Door/Window/Wiper/Seat controller• BLDC/PMSM motor control• Park assistant• E-shifter• TPMS• Real time control in infotainment system• Battery management system• Human machine interface such as touch sense control • Secured vehicle data transfer• Safety controller• Over the air update图1:S32K14x系列高级架构框图图2:S32K11x系列高级架构框图。
基于ARM的汽车CAN总线控制系统的研究与实现

3 基于 A 的嵌入式系统 I
31 AR 体 系 . M A M ( d a c dR S a h n s R A v n e ICM c i e )是 微 处 理 器 行 业 的一 家
种可加载的 内核模块 ,具有高 的优先级 。另外,所有的中
断都先 由 R — iu TL nx来 处理 , 之后才 由标准 的内核来处理 。 非 实时任务通过 R — i u T L n x提供的 F F 一种透明的管道 )与 IO( 实时任务通信 。
需要进行数据交换 。
u - iu C L n x系统和 Ln x系统一样,属于类 U i iu n x系统 , 有很高 的可靠性与 网络特性 ,但实 时性不强 ,针对车辆仪表 对实行性 的严格要求 ,因此必须解决实时性 的问题 ,本系统 采取打入 R T补丁的方法。 R — iu T L n x是美 国N T大学对标准 L n x M iu 的一个实时扩展
Ab ta t CAN ly ar l f o s c: r pa o e o mmu ia n , x h n e i f r t n b t e c n c t g e c a g n o ma i ewe n ECUs n c r S n n o m a o o n sc u sst a i o a . o ma y i f r t n p i t o re h t i i t e ea e h g n w u e d Th s a e u y t a k n d a mg s f h r r J h a d l b s p e . i p p rs d t a i g a v n e ARM ’ h e o m a c n df a o , sn o s t h t o S i h p r r n ea d mo i c t n u i g ARM o b g f i i t e t e c ri f r t n c n r lra d n ta e Daa c u d b a e n l c H o l r o r ia i n Th s a h a o ma o o t e eg t . t o l e s r d a d a e sc u d wo k i c o d n t . i c n i r v u f ce c . n i o n h l n o mp o eb se i in y
汽车电子控制技术第8章电子控制安全气囊系统

在点火器引爆点火剂的瞬间,点火剂会产 生大量热量,氮化钠受热立即分解释放氮气, 并从充气孔充入气囊。
(2) 点火器 点火器外包铝箔,安装在气体发生器内部 中央位置,其分解图如图8.10所示。 点火剂包括引爆炸药和引药,引出导线与 气囊连接器插头连接,连接器中没有短路片(铜 质弹簧片)。
当连接器插头拔下或插头与连接器未完全 结合时,短路片将两根引线短接,防止静电或 导电将电热丝电路接通而造成气囊误膨开。
当汽车遭受碰撞且减速度达到设定值时, SRS ECU发出控制指令将气囊组件中的点火器 (电雷管)电路接通,电雷管引爆使点火剂(引药) 受热爆炸(即电热处通电发热引爆炸药)。 点火剂引爆时,迅速产生大量热量,使充 气剂(叠氮化钠固体药片)受热分解并释放出大 量氦气充入气囊,气囊便冲开气囊组件上的装 饰盖板鼓向驾驶员和乘员; 使驾驶员和乘员面部和胸部压靠在充满气 体的气囊上,在人体与车内构件之间铺垫一个 气垫,将人体与车内构件之间的碰撞变为弹性 碰撞。
汽车电子控制技术
第8章 电子控制安全气囊系统
8.1 概 述
安全气囊(Supplemental Restraint System, SRS),也称辅助乘员保护系统。 它是一种当汽车遇到冲撞而急剧减速时能 很快膨胀的缓冲垫,可以保护车内乘员不致撞 到车厢内部,是一种被动安全装置,具有不受 约束、使用方便和美观等优点。 近年来随着世界汽车市场的竞争愈演愈烈, 以及安全气囊制造成本的降低,以往只在高档 轿车作为选装件的安全气囊,现已逐步发展到
作为标准件安装到一些小型、紧凑型轿车上。
8.1.1 安全气囊的分类 1. 按碰撞类型分 根据碰撞类型的不同,安全气囊可分为正 面碰撞防护安全气囊系统、侧面碰撞防护安全 气囊系统和顶部碰撞防护安全气囊系统。 正面碰撞防护安全气囊系统在欧美轿车的 驾驶员和副驾驶员处有较高的安装率。 实际交通事故统计表明,安全气囊与三点 式安全带配合使用,对正面碰撞事故中的乘员 具有更好的保护效果。
分析汽车安全气囊控制

分析汽车安全气囊控制分析汽车安全气囊控制1安全气囊点火控制的几种算法1)加速度法该算法是通过测量汽车碰撞时的加速度(减速度),当加速度超过预先设定的阈值就弹出安全气囊。
2)速度变量法该算法是通过对汽车加速度进行积分从而得到加速度变化量,当加速度变化量超过预先设定的阈值时就弹出安全气囊。
3)加速度坡度法该方法是对加速度进行求导得到加速度的变化量作为判断是否点火的指标。
4)移动窗积分算法[2]对加速度曲线在一定时间内进行积分,当积分值超过预先设置的阈值时,就发出点火信号。
1.1移动窗积分算法下面具体介绍一下移动窗积分算法,选定以下几个观察量作为气囊点火的条件指标。
①汽车碰撞时的水平方向加速度(或减速度)ax。
ax是直接反映碰撞激烈程度的信号,而且ax在最佳点火时刻的选取中起关键作用。
②汽车碰撞时垂直方向的加速度ay,气囊控制系统加入ay对非碰撞信号能起到很大的抗干扰作用,当汽车发生正向碰撞时,ay与ax有很大的不一致性[3];而当汽车受到路面干扰,例如汽车与较高的台阶直接相撞时,ay与ax有很大的一致性[3],可以由此来判别干扰信号。
结合这几个量,得出一个判断气囊点火的最佳指标。
需要采样一个时间段(从碰撞开始)ax的值,根据这一系列的值才能判断碰撞的激烈程度.气囊点火控制算法应在发生碰撞后20~30ms内做出点火判断,因为气囊膨胀到最大需要时间大概为30ms[4],在碰撞初速度为28.4km/h时,人体向前移动5inch到达接触气囊的时间大概为70ms,则目标点火时刻为70-30=40ms,所以气囊打开应该在碰撞后的40ms时刻,所以算法必须在20~30ms内做出点火决定。
这样可以采样碰撞后的20个加速度值(频率是1kHZ)作为算法的输入值。
而对于垂直方向也可以如此采样。
则可得两组值:ax(1),ax(2)……ax(20);ay(1),ay(2)……ay(20).移动窗算法中对ax的处理为(1)式:(1)图2移动窗口算法示意图其中t为当前时刻,w为时间窗宽度(采样时间宽度),对ax(t)进行积分,得到指标S(t,w),当S(t,w)超过预先设定值时,则发出点火信号。
汽车安全气囊系统

汽车安全气囊系统汽车安全气囊系统的毕业论文[摘要]安全气囊是现代轿车上引人注U的新技术装置。
汽车安全气囊系统的包括传感器总成、充气、折叠气囊、点火器、固态氮、警告灯等。
当汽车受到前方一定角度内的高速碰撞时,装在车前端的碰撞传感器和装汽车中部的安全传感器,就可以检测到车突然减速,并将这一信号在0.01秒之内速度传递给安全气囊系统的控制电脑。
电脑在经过分析确认之后,立即引爆气囊包内的电热点火器(即电雷管),使其发生爆炸,这一过程一般只需0.05秒左右。
点火器引爆之后,固态氮粒迅速气化,大量氮气化,大量氮气立即吹涨气粪,并在强大的冲击力之下,气粪冲开方向盘上的盖而安全展开。
主要研究内容和章节有:安全气囊的作用、安全气囊的类型、两次动作的双气囊系统工作原理、系统主要部件中央传感器、安全传感器、电子控制器、安全气襄的功能、气囊在车内的标识、气囊系统的丄作原理、使用注意参项、安全气囊的维护等。
[关键词]安全气囊传感器安全[Abstract]The safe air sac is a modern car to ascend the new technique in eye-catcher equips・The safe air sac in car system includes to spread to feel the machine is total, the spirit of air , fold the air sac and order firearms, solid nitrogen, warning signa 1.・・etc・・When the car suffers the certain angle in front inside super-speed to hit, packing the collision in car head spreads to feel the machine spreads to feel with the safety that pack the car central part machine, can examine the car to deceleratesuddenly, combine this signal in 0. 01 control for inside speed delivering to safe air sac systems computer .The computer set off immediately after confirming through analysis the air sac electricity in the pack heat light the firearms ( give or get an electric shock namely thunder tube), making its occurrence exploded, the general in this processneeds 0.05 or so. After lighting the firearms set off, the solid nitrogen grain is quick to gasify, the nitrogen of large quantity gasifies, the large quantity nitrogen spirit blows to rise the air sac immediately, and in the mighty impact dint under, the air sac hurtles to open the co ver on the steer device but the safety launches・[Keywords] Safe air sac Spread to feel machine Safety目录刖言..................................................................... ....... 3 1概述..................................................................... ....... 4 1. 1安全气粪的作用........................................................... 4 1.2安全气囊的类型 (4)2两次动作的双气囊系统丄作原理.......................................... 5 3系统主要部件..................................................................... ..5 3. 1前方传感器 (5)3. 2中央传感器 ............................. (6)3. 3安全传感器 (6)3. 4电子控制器 (6)4安全气襄的功能................................................................. 8 5气粪在车内的标识 (9)5. 1气囊系统的工作原理 (9)5. 2使用注意参项.............................................................. 10 5.3安全气囊的维护........................................................... 11结论............ 12谢辞............ 13参考文献....................................................................... ..14前言安全气囊,也称辅助乘员保护系统。
汽车安全气囊毕业论文
安徽现代信息工程职业学院毕业论文题目:安全气囊的应用与发展姓名:赵开洋院系: 机电工程系专业:汽车检测与维修技术届别: 2013届学号:指导教师:张坤目录汽车安全气囊的发展与应用学生:赵开洋指导老师:张坤安信院机电系汽检1001班[摘要]安全气囊是现代轿车上引人注目的新技术装置。
汽车安全气囊系统的包括传感器总成、充气、折叠气囊、点火器、固态氮、警告灯等。
当汽车受到前方一定角度内的高速碰撞时,装在车前端的碰撞传感器和装在汽车中部的安全传感器,就可以检测到车突然减速,并将这一信号在0.01秒之内速度传递给安全气囊系统的控制电脑。
因此,确保汽车行驶的安全性,解决乘车人员的安全越来越受到人们的重视。
而在汽车上装配安全气囊就是一种有效的解决方法。
本文主要介绍安全气囊的作用、安全气囊的类型、安全气囊的发展、系统主要部件、气囊在车内的应用、气囊系统的工作原理、使用注意参项、安全气囊的维护等。
[关键词] 安全气囊;传感器;安全;发展;应用近几年来,汽车作为一种便捷的现代化交通工具,给人们带来了不少的方便,但是因为交通事故也给人们造成不少严重的损失。
因此汽车的安全问题便一直伴随在我们身边。
随着高科技的发展,新型的汽车安全部件诞生了,即汽车安全囊。
安全气囊对乘员的保护效果是非常明显的,被称为驾驶员的“救命袋”,它可以保护人在汽车发生事故所引发的安全问题,同时也给汽车工业带来了繁荣,而汽车安全气囊它在当今时代又如何的去发展和应用呢?一、汽车安全气囊的发展(一)、国外汽车安全气囊的发展最早发展安全气囊系统的国家是美国,是美国机械工程师约翰·赫缀克(John w.Hertrick)于1953年发明的,并获得了题为“汽车缓冲安全装置(Safety Cushion Assembly For Automotive Vehicles)”的美国专利US2649311。
它的发展历史过程可以概括为:发明于50年代,开发于60年代,应用于70年代,发展于80年代,推广与于90年代。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图3点火触发电路原理图
2.3系统的软件设计 系统采用Cortex—M3内核处理器简化了软件开发环境。
针对LM3S1138等一系列的微控制器,TI官方免费提供了基 于C语言(符合ANSI C标准)的驱动库,它包含了众多固件 函数库,对每一个外设都有相应例程,可以很方便地根据应 用需要进行修改和移植。因此在软件编程时,无需汇编程序的 软件管理,完全可以用驱动库C语言函数进行编程开发。开 发应用程序时,利用驱动库的例程进行模块化设计,不仅程序 编写方便,而且代码简洁且可读性强。对编写大型程序而言, 采用驱动库能增强可靠性和安全性,同时降低维护成本。故本 系统软件程序利用TI公司提供的驱动库例程进行模块化程序 设计,把整个系统程序分为若干个小程序或模块,分别进行 独立设计、编程和测试。最后将各模块构建一个完整的工程,
LM3S1138处理器内置8通道10位ADC,采样速率可达 1M/s,精度足够用于安全气囊。传感器测得加速度后,从相 应的输出管脚输出电压值。通过LM3S1138处理器内置的 ADC对电压值进行模数转换,再存人到软件设定的数组中。 加速度测量电路的硬件原理图如图2所示。
本系统只使用MMA7260三轴加速度传感的X和z两轴 来进行水平方向的碰撞判断。X轴方向测量汽车正面碰撞的 加速度,Z轴方向测量汽车垂直方向的加速度。当汽车高速驶 过沟、坎路面时,会导致传感器即使在没有发生碰撞的情况 下,也产生较大信号。此信号叠加在低速碰撞的碰撞波形上, 导致微控制器误认为高速碰撞,进而发生误启爆n]。鉴于此, 当汽车z轴(垂直方向)产生较大的加速度时,无论X轴方 向加速度如何,安全气囊均设计为不启爆。避免了因为汽车高 速驶过地面路障时,安全气囊引爆所造成的不必要的损失,增 强了路面抗干扰性。 2.2.2点火触发电路
由于气囊气体发生器的点爆时需20mA电流脉冲。若直接 用LM3S1138的I/O口输出高电平进行引爆,驱动过小,无法
满足要求。系统选用电磁式继电器,在LM3S1138输出口的控 制下可驱动大功率的负载。由于继电器会产生较明显的干扰, 故在继电器周围加抗干扰电路的同时与光电耦合器配合使用, 使得处理器与触发电路光电隔离。当碰撞发生时,安全气囊对 身材过于矮小的成年人或儿童不但没有保护作用,引爆的巨大 冲击力甚至会将其弹死。为了更好地实现安全点火和智能化点 火,系统在触发同路上设置一个座位压力感应装置。如果有成 年人人座,则装置闭合,点火电路可正常工作。相反,如果装 置断开,则表明无人入座或只有矮小成年人或儿童入座,触发 电路不能形成回路。此时,即使汽车发生碰撞且算法发出点火 信号,安全气囊也不爆破。这样,既防止在无人入座的状态下 引爆气囊而造成的经济损失,又避免了气囊对矮小成年人和儿 童造成的伤害。点火触发电路的原理图如图3所示。
关键词:ARM Cortex—M3内核;微控制器;安全气囊;控制系统
Automotive Airbag Control System Based on
the Microcontroller with ARM Cortex~M3 Kernel
GUO B01,Guan Juhual,Li Jie2
(1.School of Science and Technology,Nanchang University,Nanchang 330029,China; 2.School of Power and Energy,Northwestern Polytechnical University,Xi'an 710072,China) Abstract:In view of the high—volume computing and high real—time features of automotive airbag control system,a design based on the microcontr01ler with ARM Cortex—M3 Kernel is provided in this paper. Industrial—grade 32一bit high—performance microcontroller LM3S1 1 38 based on ARM Cortex—M3 core with embeded uC/OS—II operating system and blasting algorithm based on moving integration window 8re used tO built the automotive airbag control system.The modular design method which use Tl's official driver libraries greatly re— duce the development cycle.As the LM3S1138 microcontroller integrates a number of peripherals and has a wealth of i/o ports,this system has high integration and strong expandability.Test results show that the system can accurately control the best ignition time of the air bag, which verify the feasibility of this design.
本系统微处理器选用TI公司基于ARM Cortex—M3内核 的LM3S1138工业级微控制器。其工作温度范围是~40~ 85℃,并具有良好的电磁兼容特性,可应用于汽车电子 领域¨]。
2 系统工作原理与设计
2.1 系统的工作原理 安全气囊控制系统主要由传感器、自检电路、触发电路、
万方数据
中华测控网 chinamca.corn
气囊控制系统可分为机械式、模拟电子式和嵌入式3种类 型。对于机械式和模拟电子式控制系统,由于硬件的局限,灵 活性受到很大限制,应用日益减少[1]。新一代的气囊控制系统 均为带微控制器的嵌入式控制系统。嵌人式控制系统的控制算 法由软件实现,极大地提高了系统的灵活性,并具有记录事故 数据和与上位机进行通讯的功能。
摘要:针对汽车安全气囊控制系统实时性要求高、运算量大的特点,提出了基于ARMCortex—M3内核微控制器的设计方案;方案 选用基于ARMCortex—M3内核的-I=业级32位高性能微控制器LM3S1138,嵌入“c/os一Ⅱ操作系统,运用移动积分窗爆破算法。构建 了汽车安全气囊控制系统;系统软件设计部分使用TI公司官方提供的驱动库进行模块化设计,大大缩短了开发周期。由于LM3S1138微 控制器是片上系统(SoC),集成了众多外设并具有丰富的I/0口,故该系统具有集成度高、体积小及可扩展性强的特点;台车试验和实 车试验表明,系统可较为准确地控制气囊的最佳点火时刻,从而验证了方案的可行性。
·2092·
计箅机测量与控制
通讯电路和报警电路组成,如图l所示。
其工作原理为:上电后,系统进行自检,确定触发电路是
否可以正常工作。若触发电路存在故障,报警电路进行声光报
警,表明系统无法正常工作,通知驾驶员及时修理。当自检正
常时,通过32位微处理器LM3S1138不断对加速度传感器
MMA7260测得的信号进行采样。当汽车受到一定角度内的高
速碰撞时,系统在经过算法分析确认之后,立即触发气囊包内
的点火器,气囊迅速充满气体,阻挡驾驶员与汽车构件之间可
能发生的碰撞,通过气囊七排气孑L的节流阻尼作用来缓冲吸收
cl
…~
驾驶员动能,从而达到保护驾驶员安全的目的。
第18卷
图2数据采集电路原理图
图1安全气囊控制系统结构图
2.2系统的硬件设计 2.2.1加速度测量电路
中华测控网
chinamca.tom
万方数据
第9期
郭波.等:基于ARM的汽车安全气囊控制系统设计
·2093·
完成应用程序设计。将整个工程分成了主程序、启动任务、定 时采样任务和串行通信任务等4大模块。流程图如图4所示。
— (8)主程序(b)启动任务
3性能试验
目前汽车业内普遍采用的是5英寸(1英寸=2.54cm) 30ms准则来确定安全气囊的最佳点火时刻[5]。在汽车碰撞过 程中,乘员相对于车体向前移动5英寸时刻的前30ms是气囊 的最佳点火时刻。其依据是大多数已系好安全带的轿车乘员与 转向盘之间的间距为12英寸,气囊充气后的厚度为约为7英 寸,气囊从点爆到充满气体的时间为30ms。当气袋充满气体 的时刻乘员恰好与气袋接触,气囊保护作用最佳。若气囊点火 过早,当乘员接触到气囊时,气囊已泄气,起不到保护作用。 当气囊点火过晚,乘员由于惯性前移,气囊会把乘员打伤甚至 致死。所以最佳点火时间是设计安全气囊控制器的关键。而本 系统利用积分窗算法和ARM Cortex处理器相结合,取得了较 好的效果,试验结果和该准则基本吻合。 3.1台车试验
汽车的安全气囊要求能在一个极短的时间内检测到汽车碰 撞事故的发生并控制气囊启爆。为了实现上述目标,要求安全 气囊控制系统的微控制器运算能力强、I/O口充足。基于此, 选择高性能的32位微控制器,研究并开发出较为实用的汽车 安全气囊控制系统,具有一定的应用和参考价值。本文在对国
收稿日期:2010一OZ一23;修回日期:2010一04一03。 基金项目:南昌大学自然科学基金项目资助(2008YKY一004)。 作者简介:郭波(1981一),男,山东沾化人,讲师,硕士,主要从 事嵌人式系统方向的研究。