IR2104 + IRF540 MOS电机驱动全桥
IR2104 + IRF540 MOS电机驱动全桥

R2104 + IRF540 MOS电机驱动全桥学习与实践过程/bbs/article_1012_130178.html使用L293或L298等全桥芯片来控制直流电机虽然简便而且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。
在电动车上,马达控制芯片的内阻过大会导致车子的加速度变小。
本人设想在暑假制作一个大的轮式或者履带式机器人,并且希望它能跑到公交车那么快,于是开始研究如何使用MOS管来控制更大电流的电机。
首先,本人参考了《大功率直流马达的驱动——ABU ROBOCON 2005比赛之动力方案》一文中的电路图(原文地址 /article.php?sid=192 )按照这个原理图,我热转印制作了单个全桥的实验电路。
个别的电阻电容值有所变动。
上电并给予有效的持续高电平信号后发现电路不能驱动马达,而2104开始发烫,540没有任何反应。
于是更换2104,但仍出现同样的现象。
通过示波器检测发现,高端MOS没有被驱动,而低端MOS的G端信号正常,因而桥没有被导通。
更换信号方向,另外半桥仍然出现相同的现象。
本人开始怀疑是BOOTSTRAP电容的问题,于是实验了不同的电容值。
但无论怎么变换,问题仍然没有被解决。
由于手头没有4148,使用了IN5819作为续流二极管,按道理5819只会比4148更好,不应该成为问题的原因。
由于手头2104只有6片,而所有的都上电并且发热过,于是重新购买了一批2104。
在这里感谢周顺同学,那天刚好他毕业考考好,帮我到科技京城买了2104。
更换2104后,电路工作正常。
周顺看了看我原来的2104,恍然大悟:原来的芯片是97年前的旧货。
马达欢快地转了起来。
由于540的内阻要比298小很多,马达的加速度明显提高,变向时电刷更是发出了闪亮的火星。
回到家后用示波器开始研究高端MOS的G端驱动电压波形。
发现在EN端为高的初期,高端MOS的驱动电压突然升至比VCC高10V。
IR2101应用笔记(IR2101)(全桥)(MOS)
IR2101应用笔记(IR2101)(全桥)(MOS)
摘要:
IR2101是半桥驱动,当然IR也有全桥的驱动,但因为手上正好有IR2101,所以就用两片IR2101+4个NMOS做了一个全桥驱动。
介绍:
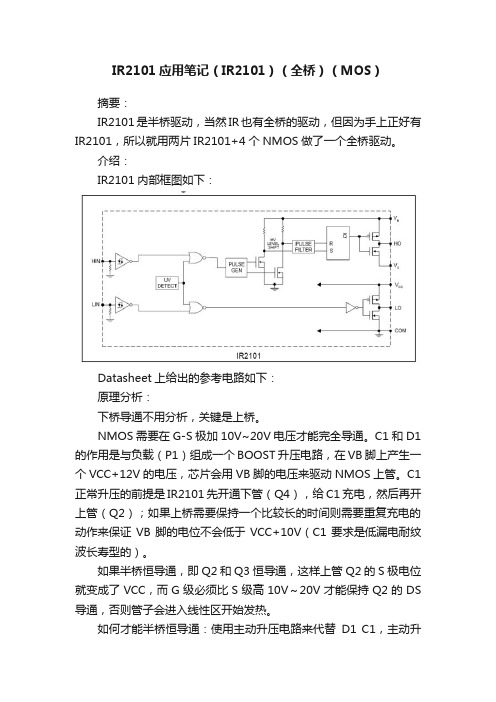
IR2101内部框图如下:
Datasheet上给出的参考电路如下:
原理分析:
下桥导通不用分析,关键是上桥。
NMOS需要在G-S极加10V~20V电压才能完全导通。
C1和D1的作用是与负载(P1)组成一个BOOST升压电路,在VB脚上产生一个VCC+12V的电压,芯片会用VB脚的电压来驱动NMOS上管。
C1正常升压的前提是IR2101先开通下管(Q4),给C1充电,然后再开上管(Q2);如果上桥需要保持一个比较长的时间则需要重复充电的动作来保证VB脚的电位不会低于VCC+10V(C1要求是低漏电耐纹波长寿型的)。
如果半桥恒导通,即Q2和Q3恒导通,这样上管Q2的S极电位就变成了VCC,而G级必须比S级高10V~20V才能保持Q2的DS 导通,否则管子会进入线性区开始发热。
如何才能半桥恒导通:使用主动升压电路来代替D1 C1,主动升
压到VCC+12V,输入IR2101的VB脚,C2保留D1去掉。
D3~D6的作用:关断时为快速泄放MOS管GS寄生电容上的电荷一般采取在限流电阻上并一个二极管的做法,这样可以加快关断速度。
IRF540中文资料
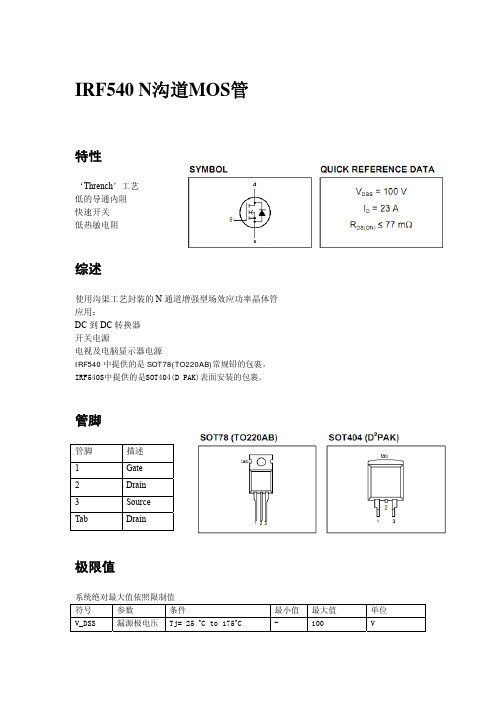
IRF540 N沟道MOS管特性‘Thrench’工艺低的导通内阻快速开关低热敏电阻综述使用沟渠工艺封装的N通道增强型场效应功率晶体管应用:DC到DC转换器开关电源电视及电脑显示器电源IRF540中提供的是SOT78(TO220AB)常规铅的包裹。
IRF540S中提供的是SOT404(D PAK)表面安装的包裹。
管脚管脚描述1 Gate2 Drain3 SourceTab Drain极限值系统绝对最大值依照限制值符号 参数 条件 最小值最大值 单位 V_DSS 漏源极电压 Tj= 25 ˚C to 175˚C - 100 VV_DGR V_GS I_D I_DM P_D Tj,Tsig漏门极电压 门源极电压 连续漏电流 脉冲漏电流 总功耗 操作点和存储温度Tj = 25 ˚C to 175˚C; RGS = 20 k Ω Tmb = 25 ˚C; VGS = 10 V Tmb = 100 ˚C; VGS = 10 V Tmb = 25 ˚C Tmb = 25 ˚C- - -- -- -55100 ±20 23 16 92 100 175V V A A A W ℃雪崩能量极限值符号 参数条件最小值最大值 单位AS E AS I非重复性雪崩能量最大非重复性雪崩电流Unclamped inductive load, IAS = 10 A; tp = 350 µs; Tj prior to avalanche = 25˚C; VDD ≤ 25 V; RGS = 50 Ω; VGS = 10 V; refer to fig:14- - 230 23mJ A热敏电阻符号参数条件最小值典型值 最大值 单位thj mb R - thj a R -安装底座交界处的热阻 周围环境热阻SOT78封装,自由空间SOT404封装,PCB 上- - -- 60 501.5 - -K/W K/W K/W电特性25℃ 除非另有说明 符号参数条件最小值 典型值 最大值单位 ()BR DSS V()GS TO V()DS ON R漏源极崩溃电压门阀电压漏源极导通电阻GS V =0V ;D I =0.25mATj = -55˚CDS V = ; ID = 1 mAGS V Tj = 175˚C Tj = -55˚CGS V = 10 V; ID = 17 ATj = 175˚C10089 21 - -- - 3 - - 49 132- - 4 - 6 77 193V V V V V m Ωm Ωfs g GSS I DSS I 向前跨导 门源极泄漏电流 0门极电压漏电流DS V =25V; D I =17A GS V =±20 V;DS V =0VVDS = 100 V; VGS = 0 VVDS=80V;VGS=0V;Tj= 175˚C 8.7 - - - 15.5 10 0.05 - - 100 10 250 S nA uA uA ()g tot Q gs Q gd Q 总共门极电荷 门源极电荷 门漏极电荷 ID = 17 A VDD = 80 V; VGS = 10 V- - - - - - 65 10 29 nC nC nC d on Tr T doff Tf T 开启延迟时间 开启上沿时间关闭延迟时间 关闭下沿时间 DD V = 50 V; D R = 2.2 Ω; DD V = 10 V; G R = 5.6 ΩResistive load- - - -8 39 26 24 - - - -ns ns ns ns d L d Ls L内部漏电感 内部漏电感内部源极电感Measured tab to centre of die Measured from drain lead to centre of die (SOT78 package only)Measured from source lead to source bond pad--- 3.5 4.5 7.5- - -nH nH nHiSS C oSS C rSS C输入电容 输出电容 反馈电容GS V = 0 V; S D V = 25 V; f = 1 MHz- - -890 139 831187 167 109pF pF pF反向二极管极限值及特性符号 参数条件最小值典型值最大值单位S I SM IDS V连续源极电流脉冲源极电流二极管正向电压F I =28A ; GS V =0V- - - - - 0.94 23 92 1.5 A A V t rrrr Q反向恢复之间反向恢复命令F I =17A ;=0V;GS V -d F I /dt=100A/us;=25VR V - -61 200- -ns nC底座温度-自然功率降低百分比图1:自然功率损耗底座温度-漏电流降低百分比图2 :自然持续漏电流漏源极电压-脉冲漏极电流峰值图3 :安全操作区域脉宽-瞬态热阻抗图4:瞬态热阻抗漏源极电压-漏极电流图5:典型输出特性漏极电流-漏源极导通阻抗图6:典型导通阻抗图7:典型传递特性图8:典型跨导图9:漏源极导通阻抗图10:门阀电压图11:阈漏极电流图12:典型电容值图13:典型的反向二极管电流图14:最大允许非重复性雪崩电流(IAS)和雪崩的时间。
基于MOS管驱动芯片IR2104介绍
基于MOS管驱动芯片IR2104介绍
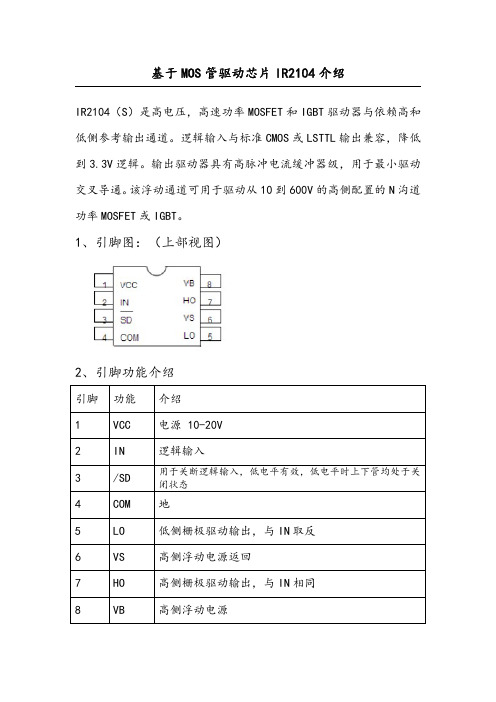
IR2104(S)是高电压,高速功率MOSFET和IGBT驱动器与依赖高和低侧参考输出通道。
逻辑输入与标准CMOS或LSTTL输出兼容,降低到3.3V逻辑。
输出驱动器具有高脉冲电流缓冲器级,用于最小驱动交叉导通。
该浮动通道可用于驱动从10到600V的高侧配置的N沟道功率MOSFET或IGBT。
1、引脚图:(上部视图)
2、引脚功能介绍
引脚功能介绍
1VCC电源10-20V
2IN逻辑输入
3/SD用于关断逻辑输入,低电平有效,低电平时上下管均处于关闭状态
4COM地
5LO低侧栅极驱动输出,与IN取反
6VS高侧浮动电源返回
7HO高侧栅极驱动输出,与IN相同
8VB高侧浮动电源
3、MOS管内部原理
4、时序图
当/SD为1时,HO=IN;LO取反IN,
当/SD为0时,不管IN输入什么,HO和LO都为0。
5、典型连接
其中:二极管可以选用1N5819,左侧电容可以选用10UF,右侧电容可以选用1.5uf,两个电阻可选用20R。
STM32+IR2104S的H桥电机驱动电路详解

STM32+IR2104S的H桥电机驱动电路详解电机:俗称“马达”,依据电磁感应定律实现电能转换或传递的一种电磁装置。
包括:电动机和发电机。
电动机在电路中是用字母M表示,它的主要作用是产生驱动转矩;作为用电器或各种机械的动力源,发电机在电路中用字母G表示,它的主要作用是利用机械能转化为电能。
电机控制:对电机的启动、加速、运转、减速及停止进行的控制。
1.直流有刷电机直流有刷电机(Brushed DC,简称BDC),由于其结构简单,操控方便,成本低廉,具有良好的扁动和调速性能等优势,被广泛应用于各种动力器件中,小到玩具,按钮调节式汽车座椅,大到印刷机械等生产机械中都能看到它的身影。
直流电源的电能通过电刷和换向器进入电枢绕组,产生电枢电流,电枢电流产生的磁场与主磁场相互作用产生电磁转矩,使电机旋转带动负载。
优点:价格低、控制方便缺点:由于电刷和换向器的存在,有刷电机的结构复杂,可靠性差,故障多,维护工作量大,寿命短,换向火花易产生电磁干扰。
2.步进电机步进电机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器接收到个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。
我们可以通过控制脉事的个数来控制电机的角位移量,从而达到精确定位的目的;.同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
优点:控制简单,低速扭矩大,成本低;缺点:步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声;同时,步进电机是开环控制,控制精度和速度都没有伺服电机那么高。
3.伺服电机伺狠电机广泛应用于各种控制系统中,能将输入的电压信号(或者脉冲数)“转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。
伺服电机系统见下图。
一般地,、要求转矩能通过控制器输出的电流进行控制;电机的反映要快、体积要小、控制功率要小。
伺服电机主要应用在各种运动控制系统中,尤其是随动系统。
mos管的驱动电路设计ir2104

mos管的驱动电路设计ir2104
IR2104是一款由Infineon T echnologies公司生产的mos管驱动器集成电路,适用于开关电源和驱动大型mosfet的应用。
以下是一种基本的IR2104驱动电路设计,用于驱动一个N沟道mosfet:
1. 电源电压:
IR2104的工作电源电压范围为10V到20V。
选择一个适合的电源电压。
2. 输入端:
IR2104有两个输入端:HIN(High-Side Input)和LIN(Low-Side Input)。
将HIN接地,将LIN连接到一个适当的输入信号源,例如微控制器的数字输出引脚。
3. 驱动电压:
IR2104通过VBAT引脚提供驱动电压给mosfet的门极。
通常,mosfet的门极电压取决于所使用的mosfet的VGS(Gate-to-Source Voltage)特性曲线。
使用一个适当的电阻分压电路将VBAT与GND连接,以设置所需的驱动电压。
4. mosfet的输出电流测量:
IR2104具有一个驱动输出(HO)和一个反相驱动输出(LO)。
它们分别连接到mosfet的上源和下源端。
为了测量mosfet的输出电流,可以使用一个电流传感器来测量这两个输出之间的电流差异,例如霍尔效应电流传感器。
5. 辅助组件:
为了确保IR2104的工作稳定性,还需要添加适当的陶瓷电容和电源去耦电容来滤除噪声。
请注意,上述电路仅用于基本指导。
在设计实际驱动电路时,请注意考虑所用mosfet的电压、电流和功率特性,以确保整个驱动电路的安全和可靠性。
此外,在设计和布局电路板时,请遵循相关的安全和EMC规范。
ir2104驱动电路原理

ir2104驱动电路原理IR2104驱动电路原理。
IR2104是一款高性能MOSFET和IGBT驱动器芯片,其内部集成了高低侧驱动器,可用于直流至直流(DC-DC)转换器、半桥和全桥逆变器、电机驱动器以及其他高频开关应用。
本文将介绍IR2104驱动电路的原理及其在电子领域中的应用。
IR2104驱动电路的原理。
IR2104采用了高低侧驱动器的设计,能够有效地控制功率器件的开关。
其内部包含了两个独立的驱动器,分别用于控制功率器件的高侧和低侧。
在工作时,高低侧驱动器通过外部电容器进行互补,以保证两个驱动器之间的互补性。
通过外部电阻和电容器的组合,可以调整IR2104的输出特性,以满足不同功率器件的驱动需求。
在使用IR2104时,需要注意以下几点原理:1. 输入信号,IR2104的输入信号为逻辑电平,可直接由微控制器或其他数字电路输出。
输入信号的频率和占空比将直接影响到功率器件的开关速度和工作效率。
2. 输出驱动,IR2104的输出驱动能力较强,可直接驱动功率MOSFET和IGBT,无需外部驱动器。
同时,IR2104的输出端还包含了反馈信号,可用于监测功率器件的工作状态。
3. 死区时间,IR2104内部集成了可调的死区时间电路,用于防止高低侧驱动器同时导通,避免功率器件出现短路故障。
通过外部电容器的调节,可以实现死区时间的精确控制。
IR2104在电子领域中的应用。
IR2104作为一款高性能的驱动器芯片,广泛应用于电子领域中的高频开关电路。
其主要应用包括但不限于以下几个方面:1. 电源转换器,IR2104可用于直流至直流(DC-DC)转换器的控制电路,实现高效率的能量转换。
其高低侧驱动器的设计,能够有效地降低功率损耗,提高系统的整体效率。
2. 逆变器,IR2104可用于半桥和全桥逆变器的驱动电路,实现直流到交流的转换。
通过精确控制开关频率和占空比,可以实现对交流电压的高效控制。
3. 电机驱动器,IR2104可用于电机驱动器的控制电路,实现对电机的高效驱动。
基于MOS管驱动芯片IR2104介绍

基于MOS管驱动芯片IR2104介绍IR2104是一款高性能、低成本的MOSFET和IGBT驱动器芯片。
它具有高速开关功能和内置保护功能,广泛应用于各种工业和汽车电子系统中。
IR2104采用了高度集成的设计,将电源、驱动电路和保护电路集成在一个小型的引脚脚位的封装中。
这种设计可以降低系统的复杂性和成本,并提高系统的可靠性和稳定性。
IR2104的主要特点包括:1.高速开关:IR2104具有高驱动电流和高驱动电压能力,能够实现快速开关和关断MOS管或IGBT。
这使得IR2104适用于高速开关应用,在开关频率较高的系统中表现出优秀的性能。
2.高性能保护功能:IR2104集成了多种保护措施,可以有效地保护MOS管或IGBT免受过电流、过温、过压和欠压等故障的损害。
这些保护功能可以大大提高系统的可靠性和稳定性。
3.低功耗设计:IR2104采用了低功耗设计,能够在工作时实现高效能力,从而降低系统的能耗。
这对于应用于电池供电系统或对能耗要求较高的系统中尤为重要。
4.宽工作电压范围:IR2104的工作电压范围广泛,可以适应各种不同的电源电压需求。
这使得IR2104可以灵活应用于不同的系统设计中。
5.强大的输出驱动能力:IR2104具有高驱动电流和高驱动电压能力,能够控制大功率MOS管或IGBT的开关。
这使得IR2104成为驱动高功率负载的理想选择,适用于各种不同的应用场景。
除了以上的特点之外,IR2104还具有其他一些优势。
例如,它具有高噪声抑制能力,可以有效地减少系统中的噪声干扰;它还具有高温稳定性,可以在高温环境下长时间稳定地工作。
总的来说,IR2104是一款功能强大、性能优越的MOSFET和IGBT驱动器芯片。
它的高速开关功能、内置保护功能和低功耗设计使它成为工业和汽车电子系统中的理想选择。
无论是在高速开关应用、大功率负载控制还是电能转换系统中,IR2104都能够以稳定、可靠的方式驱动MOS管或IGBT,并提供高质量的电源和保护功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
R2104 + IRF540 MOS电机驱动全桥学习与实践过程
/bbs/article_1012_130178.html
使用L293或L298等全桥芯片来控制直流电机虽然简便而且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。
在电动车上,马达控制芯片的内阻过大会导致车子的加速度变小。
本人设想在暑假制作一个大的轮式或者履带式机器人,并且希望它能跑到公交车那么快,于是开始研究如何使用MOS管来控制更大电流的电机。
首先,本人参考了《大功率直流马达的驱动——ABU ROBOCON 2005比赛之动力方案》一文中的电路图(原文地址 /article.php?sid=192 )
按照这个原理图,我热转印制作了单个全桥的实验电路。
个别的电阻电容值有所变动。
上电并给予有效的持续高电平信号后发现电路不能驱动马达,而2104开始发烫,540没有任何反应。
于是更换2104,但仍出现同样的现象。
通过示波器检测发现,高端MOS没有被驱动,而低端MOS的G端信号正常,因而桥没有被导通。
更换信号方向,另外半桥仍然出现相同的现象。
本人开始怀疑是BOOTSTRAP电容的问题,于是实验了不同的电容值。
但无论怎么变换,问题仍然没有被解决。
由于手头没有4148,使用了IN5819作为续流二极管,按道理5819只会比4148更好,不应该成为问题的原因。
由于手头2104只有6片,而所有的都上电并且发热过,于是重新购买了一批2104。
在这里感谢周顺同学,那天刚好他毕业考考好,帮我到科技京城买了2104。
更换2104后,电路工作正常。
周顺看了看我原来的2104,恍然大悟:原来的芯片是97年前的旧货。
马达欢快地转了起来。
由于540的内阻要比298小很多,马达的加速度明显提高,变向时电刷更是发出了闪亮的火星。
回到家后用示波器开始研究高端MOS的G端驱动电压波形。
发现在EN端为高的初期,高端MOS的驱动电压突然升至比VCC高10V。
此时强推动作用起效。
但随着时间的流逝,该电压逐渐衰减为VCC,MOS的导通程度越来越不完全。
直到下一个脉冲到来,G端电压又恢复为VCC+10V,但又逐渐衰减。
也就是说,用持续的高电平信号来驱动MOS会导致MOS不能被完全导通,致使MOS 发热,马达的实际功率低下。
使用PWM信号则可以解决这个问题,它使BOOTSTRAP电容反复充电放电,使高端驱动电压始终维持在一个比较高的水平。
倘若想让马达全速前进,不能使用持续的高
电平,而需要用3%左右占空比的PWM,这是驱动2104与驱动298等全桥芯片的最大差别。
不同的BOOTSTRAP电容值适应于不同频率的PWM信号与不同的MOS。
电容值大的充电和放电时间都比较大,电压衰减得也比较慢,因而适合较低频率的PWM;电容值小的充电放电时间比较短,适合于较高频率的PWM。
虽然IR给出过一个BOOTSTRAP电容的计算公式,但本人更倾向于通过实验来寻找合适的电容值。
这样做既避免了繁杂的计算,又可以通过实验来了解它的工作原理,而且还可以适应板载电容。
通过实验,本人确定了1UF的电容值。
该电容采用了旦电容,以减少漏电。
但如果没有旦电容,其他漏电较大的电容影响也并非很大。
相对于高频的PWM,在如此短的时间内漏电的影响是微乎其微的。
但从理论上来说,BOOTSTRAP电容漏电会导致高端MOS的导通电阻变大。
总结了以上经验,本人又制作了一块双电机的MOS驱动电路。
电路没有太大的改变,只是把续流二极管改为原图所说的4148,把阻容换成了贴片封装,并且采用了1UF旦电容作为BOOTSTRAP
电容。
点击此处下载热转印用PCB文档(DXP)
该电路制作好后成功地驱动了我的机器人小车。
小车在全速启动以及突然反向运动时的性能明显比使用298要好。
主要原因为突然变向的电流很大,而298的驱动能力有限,导致变向的电流较小,加速度较小。
实验并没有发现该电路有什么问题,于是电路基本定型,转向于研究设计印刷电路板。
由于TO-220封装的MOS管直立很占空间,而且还需要散热器,于是本人决定采用贴片的D2PAK封装的IRF540,其他元件也都改为贴片封状。
另外为了散热,本人还在芯片的上面设计了散热器和风扇。
降低MOS温度可以大大提高工作效率。
一周后我拿到了印刷电路板,同时我也去购买贴片元件。
IRF540S(S是贴片,N是TO-220)并没有买到正品,而是买到了打磨后重新刻字的拆机件,其他元件都买到了正品。
回家焊接好后,电路工作正常,绿的散热器很漂亮。
点击此处下载PCB以及SCH
虽然该电路工作正常,但总感觉拆机的MOS管发热很大。
于是我决定将TO220的正品540改为D2PAK封装,以做对比实验。
首先,用凿子将BACK凿到合适的位置
剪去一个脚
用老虎钳弯到合适的位置再剪到合适的长短
改装好的540与D2PAK封装的7805对比
我将这些改装好的正品540焊接到了电路上,而且没有安装散热器。
由于急于想看到实验结果,在使用完焊锡膏后我没有洗板就上电了,结果2104突然冒火,被烧成两半。
我急忙断电,但为时已晚。
更换2104后,电路仍不能正常工作。
通过检测发现,问题出在74HC00上。
更换74HC00并洗板后,电路工作正常。
我突然意识到74HC00的剩余引脚没有接地,而焊锡膏则可能导致漏电。
因而我将这次事故的主要原因归结为:CMOS剩余引脚没有接地,而焊锡膏漏电导致惨剧发生。
电路修理好后,通过驱动同一马达,我发现正品540没有任何感觉得到的升温,而拆机540则明显升温。
我断定,拆机540并非540,而是其他电流较小的MOS打磨后冒充540。
我来到科技京城,到处寻找IRF540S,但所有的商家都告诉我,只有假的,真的没有。
而其他的贴片MOS,电流都比较小。
因此我意识到只能采用手工加工540N的办法来获得540S。
真是无奈啊。
回家后我开始实验较大电流的驱动,我将驱动电压和2104工作电压设为同路的12V,由一个2A的稳压电源供电,并且将限流开到最大。
驱动信号为97%高电平的PWM,每隔1秒反转马达。
当马达反转时,意想不到的事情发生了:马达停了下来,电流却被限制在了2A!此时板上的元件一定开始发热了!我迅速地将电源关闭。
摸了下2104,滚烫!不过还好没有烧毁。
重新上电驱动小马达一切正常。
但一反转大马达,同样的事情再次发生。
经过反复思考,我将该问题归结于电源的限流。
由于马达反转时电流巨大,拉低了电压,使2104工作电压低于了正常范围(10V-20V),最低甚至到达了3V,而此时外围电路却在继续工作,2104极有可能发生错乱而导致发热。
因此本人建议:2104的VCC最好能单独供电,千万不能因为马达而拉低电压,否则后果很可能是毁灭性的!
解决了该问题后,我想到电路的设计电流过小,50MIL的线顶多只能通过5A的电流,而540却能驱动30个安培,该电路对它的驱动能力造成了极大的浪费,因此决定重新设计。
在重新设计的电路板上,我没有改变任何的电路,而是把心思放在了走线以及散热上。
我在每个MOS的正面和反面都采用了长方形的敷铜充当散热片,并且在MOS安装的地方用数量众多的过孔将两片敷铜连接起来,使正面的热量能够迅速传递到反面进行散热。
另外在大电流的网络中,我还运用了SOLDER层去除阻焊层,使之能够镀锡以提供更大的电流。
昨天我拿到了PCB板,迫不及待地进行了焊接,洗板以及上电实验,一切顺利。
电路自身的散热性能极佳。
可以看到MOS反面的散热敷铜以及热传导用的过孔
焊接好的板子(正面)
焊接好的板子(反面)
MOS的研究基本上告以段落,因此作该文以分享我研究过程中的经验以及快乐。
有一些多余的打印好的热转印纸和5张第一板的PCB可以送给大家,请需要的人跟贴。
前提是你在索取之前已经进行过一些相关的学习和实验,并乐意将自己的快乐与大家分享。