2012ABU Robocon 比赛中文规则
机器人大赛主题及规则

2012年校内机器人大赛机器人大赛组委会2012-9-15大赛主题及规则一、比赛主题:追求卓越,再创辉煌二、比赛场地说明1)比赛场地区域为5000mm×5000m m的正方形区域。
2)比赛场地地面用2mm厚的密度板制成。
3)各区域中的杆是直径为90mm,高为600mm的圆柱体,公共栏杆高为1200mm。
4)比赛场地及每个区域具体示意如图所示。
(1)双方比赛区域A中各有一个面积为200mm×200mm的区域为小球仓库,仓库中放置的小球数量为9个。
(2)双方比赛区域B中各有一个面积为150mm×150mm的区域为小球仓库,仓库中允许1号机器人放置的小球数量最多为4个。
(3)机器人各启动区是450mm×450mm的方形区域。
二、比赛任务说明手动控制机器人:以下称1号机器人;自动控制机器人:以下称2号机器人;手动控制机器人运动区域:以下称区域A;自动控制机器人运动区域:以下称区域B;手动控制机器人运动区域的储球域:以下称仓库A;自动控制机器人运动区域的储球域:以下称仓库B;各参赛队具有两台机器人参加比赛,即具有1号机器人和2号机器人。
要求参赛队自行设计、制作机器人参加比赛,参赛的2号机器人必须是自主程序控制。
比赛分为两队进行,每队机器人总重量不得超过15Kg,数量不得超过2个。
双方机器人放在各自起始位置,比赛开始后,操作手可以操纵1号机器人,1号机器人(只能在区域A运行,机械手可以延伸到仓库B)将仓库A的小球抓取后,放置在仓库B。
仓库B的小球数量不能超过5个,即只有在5个以下(含5个)1号机器人才可以继续向仓库B放置小球。
当仓库B有小球,2号机器人(只能在区域B运行)可以开始抓取小球将其投入自己的篮筐中。
只有当2号机器人向自己的篮筐中投入的小球数量至少达到5个才可以向旗舰篮筐(公共篮筐,场地中最高的一个篮筐)中投入小球。
2号机器人抓取完小球后可沿杆爬行到一定高度后放置小球。
第十二青少机器人竞赛机器人综合技能高中组比赛须知 (1)
第十二届中国青少年机器人竞赛机器人综合技能高中组比赛须知⑴在准备区和比赛区不得用各种相机拍摄场地图或赛台。
⑵在2.5小时的准备时间内,可以在准备区和比赛区的赛台上进行调试,但每支参赛队不应长时间占用赛台。
在比赛区赛台上的调试必须在开始比赛前15分钟结束。
⑶根据本队使用的器材向裁判领取相应的编程软件光盘并自行安装到计算机上。
关于计算机使用方面的问题,可以要求裁判员或志愿者协助。
⑷ A、B、C三个赛台中央的8个拼装块的图形是完全一样的。
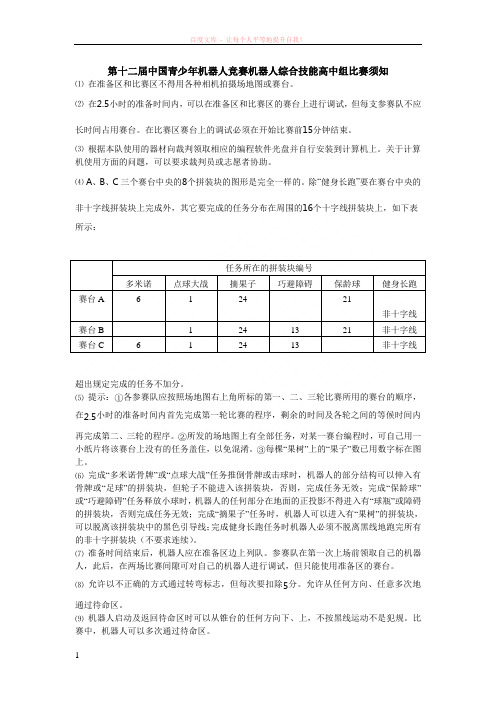
除“健身长跑”要在赛台中央的非十字线拼装块上完成外,其它要完成的任务分布在周围的16个十字线拼装块上,如下表所示:任务所在的拼装块编号多米诺点球大战摘果子巧避障碍保龄球健身长跑赛台A612421非十字线赛台B1241321非十字线赛台C612413非十字线超出规定完成的任务不加分。
⑸提示:①各参赛队应按照场地图右上角所标的第一、二、三轮比赛所用的赛台的顺序,在2.5小时的准备时间内首先完成第一轮比赛的程序,剩余的时间及各轮之间的等候时间内再完成第二、三轮的程序。
②所发的场地图上有全部任务,对某一赛台编程时,可自己用一小纸片将该赛台上没有的任务盖住,以免混淆。
③每棵“果树”上的“果子”数已用数字标在图上。
⑹完成“多米诺骨牌”或“点球大战”任务推倒骨牌或击球时,机器人的部分结构可以伸入有骨牌或“足球”的拼装块,但轮子不能进入该拼装块,否则,完成任务无效;完成“保龄球”或“巧避障碍”任务释放小球时,机器人的任何部分在地面的正投影不得进入有“球瓶”或障碍的拼装块,否则完成任务无效;完成“摘果子”任务时,机器人可以进入有“果树”的拼装块,可以脱离该拼装块中的黑色引导线;完成健身长跑任务时机器人必须不脱离黑线地跑完所有的非十字拼装块(不要求连续)。
⑺准备时间结束后,机器人应在准备区边上列队。
参赛队在第一次上场前领取自己的机器人,此后,在两场比赛间隙可对自己的机器人进行调试,但只能使用准备区的赛台。
2012赛事细则zt(1)
谁与争锋赢在安利 2012伯乐王挑战赛赛事细则三参季安排1)每四个月为一赛季,本届赛事共分为三个赛季:第一赛季为 2012年 2月 --- 5 月第二赛季为 2012年 6 月— 9 月第三赛季为 2012年 10月 ---- 2013年 1月2)参赛选手在赛季内:☆优惠顾客成功申请成为销售代表并使用70元电子优惠券或业绩达480元净营业额,则参赛个人可获加0.5分;☆每成功推荐加入一位销售代表并使用70元电子优惠券,则参赛个人可获加0.5 分;☆在赛季内新加入者如有一个月业绩达2300元净营业额,则参赛个人可再获加0.5 分;有一个月业绩达6900元净营业额以上,则参赛个人可获加 2 分;☆在总赛事内新加入销售代表业绩符合准经销商或经销商申请资格,获得公司《营销意向邀请函》,则参赛个人可获加 3 分;☆在赛季内,被推荐者参与金砖计划第一季活动者,则参赛个人可获加0.2分;☆每个参赛组组长的参赛得分均可双倍计算在小组总得分内,在个人排名时不予双倍计算;☆在赛季内,参赛小组的每个组员如若都有产生0.5分以上,该组的赛季总分可获加活力分 15分。
例:在赛季内成功推荐加入一位销售代表并使用70元电子优惠券,同时该新销售代表有一个月业绩达6900元净营业额,且购买了金砖计划第一季换购,即可获得 0.5 + 2 + 0.2 =2.7 分;如该新销售代表在总赛事结束前获得公司《营销意向邀请函》,可再获加 3 分。
3)每赛季得分为零分或排名末位的小组,将予以淘汰。
4)大赛将在文晖、江城、临安、富阳、金华、义乌六家店铺设置“伯乐王挑战赛参赛窗口”为参赛者办理新人加入手续,公司以该窗口受理的加入申请为积分依据。
四大赛奖项(每一赛季)1)小组伯乐王奖 10名:总积分最高的前十个小组为获胜小组。
“伯乐王”小组金奖 1 名:可获邀参加为期两天的特别培训“伯乐王”小组银奖 3 名:可获邀参加为期一天的特别培训“伯乐王”小组铜奖 6 名:可获邀参加为期半天的特别培训☆获得“伯乐王小组铜奖”的本赛季总得分需不少于75分;☆培训嘉宾可为社会专业人士、资深营销领导人及ACTI名师;2)个人伯乐王奖 60名:个人总积分最高的前60位参赛选手获胜。
助老机器人服务项目创新赛2012竞赛规则
助老机器人服务项目创新赛2012年比赛规则一、竞赛总体要求:1,公平竞争。
2,在完成基本项目的同时着重创新。
评分标准中只有36分为基础分,其他均为创新得分。
3,以老人起居服务为主题,可按照主题采用各种技术及扩展。
二、场地要求:2.1场地环境室内环境为平整地面,全部场景模拟墙壁环绕的两个房间,其中卧室包含自动控制的门,可通过无线网络发送门的开关指令。
卧室内包含床及桌椅。
地面铺设循迹线。
出发点为十字循迹线标记。
2.2移动线路说明比赛场景中,循迹线为白色或黑色(选取与场地颜色相反的颜色)5mm宽。
移动线路可遵循循迹线也可通过其他算法不遵循循迹线。
2.3预先确定的方位房间大小、门窗的位置、床的位置、桌子的位置以及循迹线为固定位置。
圆柱形的实心圆凳作为障碍物随机出现。
可能出现在线路正中,也可能出现在线路一侧。
2.4 场地图三、竞赛规则3.1 对机器人尺寸和外观的要求机器人初始规格尺寸要求平面投影不超过500mm*500mm的矩形、初始高度不高于1200mm。
以老人坐姿状态下,交互方便为设计要求。
外观要求电路板、电池等均在机器人内部,不能直接观察到。
液晶屏、机械臂、无线网卡等设备可安装在上部结构上。
要求外观美观、材料合理。
机器人不对人员造成危害。
机器人不对环境、家具及其他道具造成危害。
电源开关或应急按钮安装在机器人上部易操作位置。
3.2 辅助设备要求门窗均为可通过无线进行控制的智能系统。
可由比赛组委会提供也可自行提供。
门窗均为电机控制。
人工标记,可使用其他人工标记。
需要比赛前与裁判说明并进行布置。
比赛提供局域网,也可自行准备。
3.3 规则流程及评分点阶段一:定时启动机器人(10分)基础设计:根据裁判组指定时间机器人自动启动3分,平稳移动3分。
创新设计:如采用语音或灯光等方式启动机器人最高可得10分阶段二:智能判断门状态并控制门的开关(10分)基础设计:机器人移动到门前,检测门的状态,如门为关闭状态,则发送指令打开房门,并继续进入。
2012中国机器人大赛暨RoboCup公开赛水中机器人全局视觉组比赛规则
机器鱼控制平台 ..................................................................................................................... 4 照明以及全局视觉系统 ......................................................................................................... 5
2012 中国机器人大赛暨 Robocup 公开赛 水中机器人全局视觉组规则
北京大学智能控制实验室 2012 年 8 月
目
1.
录
比赛场地及设备.............................................................................................................................. 1 1.1. 比赛场地 ................................................................................................................................. 1
无线通信 ................................................................................................................................. 5
比赛项目.......................................................................................................................................... 5 2.1. 全局视觉水球(1:1) /全局视觉水球(2:2) ................................................................................ 5
【2012版高尔夫规则】定义

比杆赛的形式(Forms of Stroke Play)
个人赛(Individual):每名比赛者均以个人形式进行的比赛。
四人二球赛(Foursomes):两名比赛者以伙伴形式进行的比赛,他们只打一个球。
四球赛(Four-Ball):两名比赛者以伙伴形式进行的比赛,他们各自打自己的球。杆数较低的那名伙伴的成绩为他们在该洞的成绩。伙伴中有一人没有完成一个球洞的比赛并不会受到处罚。
如果球员在开始一个球洞的比赛时从发球区外打了球,或者他在试图纠正这一错误时从发球区外打了球,这个球不是使用中球,此时规则11-4或11-5适用。否则,使用中球包括球员选择或被要求从发球区进行下一次击球时从发球区外打的球。
比洞赛中的例外:如果球员在开始一个球洞的比赛时从发球区外打了球而对手并没有按照规则11-4a要求取消该次击球,则使用中球包括该球员从发球区外打的这个球。
当用立桩来标定侧面水障碍区的界线时,这些立桩位于该侧面水障碍区之内,且该障碍区的界线由这些立桩在地面最靠近外侧的点决定。当同时用立桩和 线来标示侧面水障碍区时,立桩作为该侧面水障碍区的识别标志,而线则决定了该侧面水障碍区的界线。当用地面上的一条线来标定侧面水障碍区的界线时,这条线 本身即位于该侧面水障碍区内。侧面水障碍区的界线垂直向上、下延伸。
同组比赛者(Fellow-Competitor)
参见“比赛者(Competitor)”。
旗杆(Flagstick)
“旗杆”是一个插在球洞中央以标示其位置的可移动的直的标志物,上面可附有旗布或其他物品(也可没有)。旗杆的横断面必须呈圆形。禁止使用可能会对球的运动产生不适当影响的软垫或减震材料。
散置障碍物(Loose Impediments)
“散置障碍物”是自然物体,它包括:
2012亚太大学生机器人国内选拔赛规则

附件12012亚太大学生机器人国内选拔赛规则1.每个队伍允许使用:一个手动机器人、一个自动机器人和一个收集机器人。
2.比赛场地和物体2.1 比赛场地尺寸为 13000mm*13000mm ,被高100mm厚度为50mm 的木头栅栏所包围。
木头栅栏用螺钉固定。
场地被高 100m m厚 50mm 的母头栅栏平均分成两半,分别给红、蓝两队(图表 1-4 )。
2.2 场地包括一个自动机器人区域、手动机器人区域、起始位置、重置位置、装载地、公共区域和投放台。
场地的标识符例如 A C M L1 L2 L3 S1 S2 不必标识在真实的场地上。
2.3 启动位置2.3.1 手动机器人必须从手动机器人启动位置( M) 开始。
2.3.2 收集机器人放在收集机器人启动位置(C), 收集机器人会被手动机器人带走(装载)。
2.3.3 自动机器人必须从自动机器人启动位置( A) 开始(图表 1)2.4 公共区域2.4.1 公共区域是颜色为黄色,高 100mm 的矩形,长为1985mm,宽为 500mm 的区域。
两个深度为 12mm 直径为 452mm的槽口放置在公共区域的表面。
比赛开始前两个槽口分别放上一个篮筐。
每个队伍只能在公共区域取一个篮筐。
(图表2 、13 )3. 比赛步骤和任务3.1 在比赛开始之前,手动机器人的操作者骑上手动机器人。
3.2 手动机器人操作者驾驶手动机器人从始发区到存放幸运币地点。
3.3 手动机器人拿起幸运币并携带它。
3.4 手动机器人的操作者驾驶手动机器人到达隧道处。
3.5 到达隧道处,手动机器人将幸运币插入幸运币盒子。
手动机器人的任何部分不允许接触幸运币盒子。
第一次穿过隧道时在没有将幸运币投放到盒子中之前,手动机器人不允许开始前进穿过隧道。
3.6 当幸运币被完全放入盒子时,裁判给以开始信号,自动机器人才可以自动启动,也可以由操作者按下开始按键。
自动机器人可以抓起存放在公共区的篮筐将其放在手动区的任何位置。
2012亚太大学生机器人大赛规则中文版
2012亚太大学生机器人大赛规则1.机器人的准备1.1 每只参赛队伍要求有三台机器人:一台手动机器人,一台自动机器人和一台收集机器人。
方块表面有两个直径452mm,深12mm的圆形凹痕,用来放置两个篮子,每支队伍只能拿其中的一个。
(图2,13)2.6篮子2.6.1两个篮子分别放在公共区的两个圆形凹痕处,每个篮子由三部分组成:一个直径450mm高400mm,用HIPS片和塑料网或是尼龙网(内有有六根螺纹杆)做成的篮子,一个直径450mm,HIPS材料的底座,一个直径80mm高388mm 的圆筒(PVC管材),整个篮子的重量为2.85Kg。
(图8、11)500mm,深12mm的圆形凹痕,用来放置篮子,放置篮子由手动机器人完成。
(图2、13)2.9装载区2.9.1装载区1(L1)长1965mm,宽1520mm位于手动机器人区,在自动机器人启动区(A)的旁边。
2.9.2装载区2(L2)是一个长1500mm,宽1500mm,高200mm的台子,位于小岛的一边,相当于一个登上小岛的台阶。
(图13)3.比赛过程和任务3.1比赛开始前,手动机器人操作手要骑在手动机器人上。
3.2手动机器人操作手操纵手动机器人从启动点到硬币架。
3.3手动机器人从硬币架上拿起硬币。
3.4手动机器人操作手操纵手动机器人到达隧道。
由自动机器人发射非无线电信号启动,或者收集机器人靠自身启动。
3.18当手动机器人搬起收集机器人并有物理接触时,手动机器人允许与收集机器人通过非射频的方式通信。
3.19收集机器人脱离手动机器人,能够自身直立在小岛上时,可以自己夹取包山上的包子放到篮子中。
只有当包子被夹取并完全放到篮子中,才被认为抢包成功。
掉落在场地上的包子不可以被再次使用。
4.4自动机器人启动点(A)(自动机器人离开自动机器人启动点之后)4.4.1如果自动机器人未能成功的从公共区搬起篮子,或是未能放置到手动区,自动机器人须从自动机器人启动点(A)重新启动,篮子将会被放回到公共区原位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012年亚太机器人大赛规则&主题Peng On Dai Gat追求繁荣和平向导1.每个参赛队有一个手动机器人,一个自动机器人以及一个馒头机器人。
2.手动操作上驾驶手动机器人到通行证站。
3.手动机器人拿起通行证到隧道口。
4.手动机器人将通行证放入隧道口的通行证盒子中。
5.自动机器人拿起公共区的篮筐放入手动区域。
6.手动机器人穿过隧道携带馒头机器人。
7.手动机器人在L1卸下馒头机器人。
自动机器人携带馒头机器人穿过桥,将馒头机器人卸载到L2或L3。
8.手动机器人拿起篮筐并放在岛上篮筐区域。
9.馒头机器人可以脱离自动机器人从L2爬上岛上的台阶,也可以从L3被手动机器人举起。
10.馒头机器人拿起底层和中间层的馒头并放入篮筐里。
11.下面2层每层至少有一个馒头已经放入篮筐,馒头机器人可以在被手动机器人举起的时候接触馒头塔顶层的馒头。
12.在比赛的最后一分钟,手动机器人可以伸长自己的手臂,直接去拿馒头塔最底层的馒头,并放入篮筐。
13.馒头机器人在将馒头塔下面2层每层至少一个馒头成功放入篮筐后,一旦成功的将顶层馒头放入篮筐,比赛立即结束。
这种类型的完成被称为“Peng On Dai Gat”。
14.如果任何一个队伍在3分钟之内都没有达成“Peng On Dai Gat”,则得分多的队伍获胜。
15.每场比赛3分钟。
比赛规则1.机器人设置1.1每个队伍允许使用:一个手动机器人、一个自动机器人和一个馒头机器人。
1.2在比赛开始之前有一分钟的时间让每个队伍设置机器人。
1.3每个队只允许有三名的操作手(包括手动操作手)能够上场设置机器人。
任何一个在规定一分钟时间内不能完成机器人设置的参赛队,可在比赛开始以后继续对机器人进行设置。
2比赛场地和道具2.1比赛场地尺寸为13000mm*13000mm,被高100mm、厚度为50mm的木栅栏所包围。
木栅栏用螺钉固定。
场地被高100mm、厚50mm的木栅栏平均分成两半,分别给红、蓝两队(图表1-4)。
2.2场地包括手动区、自动区、启动区、重启区、装卸区、公共区域和一个岛区。
场地的标识符例如A、C、M、L1、L2、L3、S1、S2不必标识在真实的场地上。
2.3手动区和自动区2.3.1自动区贴宽30mm无光泽贴纸制作的的白线。
白色贴纸包围区域每边长470mm,自动区和手动区由高100mm,厚50mm的木栅栏隔开(图表2、3)。
2.4启动区2.4.1手动机器人必须从手动机器人启动区(M)启动。
2.4.2馒头机器人放在馒头机器人启动区(C),稍后会被手动机器人带走。
2.4.3自动机器人必须从自动机器人启动区(A)启动(图表1)。
2.5公共区域2.5.1公共区域是颜色为黄色,高100mm,长1985mm,宽500mm 的矩形区域。
在公共区域的表面有两个深度12mm直径452mm的凹槽。
比赛开始前两个凹槽分别放上一个篮筐。
每个队伍只能在公共区域收集一个篮筐。
(图表2、13)2.6篮筐2.6.1两个篮筐分别放在公共区域的两个凹槽上。
篮筐由三部分组成:篮筐用直径450mm,高400mm的高抗冲聚苯乙烯的薄片和塑料网或尼龙网(加入低碳钢,阳螺纹杆)制成。
基座用直径450mm高抗冲聚苯乙烯的薄片,圆柱用直径80mm、高388mm的PVC管制成。
篮筐的重量是2.85kg(图表8和11)2.7馒头塔2.7.1馒头塔放置在正方形的投放台上,即小岛。
它包含3层。
具体每部分的细节如下:2.7.1.1各层的馒头数量2.7.1.1.1顶层:2个顶层馒头(一个是蓝队一个是红队的)2.7.1.1.2中间层:6个馒头(三个是蓝队的三个是红队的)2.7.1.1.3底层:8个馒头(四个是蓝队的,四个是红队的)2.7.1.2馒头的重量2.7.1.2.1顶层馒头:105g2.7.1.2.2中间层和底层馒头:47g2.7.1.3馒头的尺寸2.7.1.3.1顶层馒头:直径200mm,高150mm2.7.1.3.2中间层和底层馒头:直径150mm,高100mm2.7.1.4三层的直径2.7.1.4.1顶层:500mm2.7.1.4.2中间层:850mm2.7.1.4.3底层:1200mm2.7.1.5馒头塔的高度2.7.1.5.1塔总高1850mm(从小岛上表面测量)2.7.1.5.2三层表面到小岛表面的高度:顶层:1500mm中间层:1000mm底层:500mm2.7.1.5.3馒头塔基座的高度是497mm(从小岛的上表面到基座的下表面)2.7.2馒头塔的每层放置同一个中心圆上放置馒头。
2.7.3每层馒头放置的角度不同于其它层。
2.8岛区2.8.1岛区放在一个高400mm,宽3030mm,长3050mm的平台上,它等分成红蓝两部分,每部分包含馒头塔的一半和一个拐角处的篮筐区,篮筐区深12mm,直径500mm,手动机器人将篮筐放到篮筐区。
2.9装载区2.9.1装载区1(L1)在手动区临近自动机器人的启动区,长1965mm,宽1520mm。
2.9.2装载区2(L2),它提供一个台阶到小岛,它是一个正方形的平台,高200mm,长1500mm。
在小岛的旁边。
2.9.3装载区3(L3)在隧道的旁边,它是一个矩形的平台,高200mm,长1550mm,宽1000mm。
(图2,3,13)2.10隧道和通行证盒子2.10.1隧道在手动区,隧道内部尺寸长2040mm,宽1200mm,最高点高1600mm,隧道的顶棚是拱形的。
(图7)2.10.2通行证盒子放在隧道的边上,通行证盒子投掷口宽100mm,长400mm。
(图6)2.11通行证2.11.1通行证放置在通行证杆上,通行证直径300mm,厚度20mm,重170g。
2.11.2通行证是由两面贴有贴纸的低密度的聚苯乙烯粘合制成。
通行证两面绘制的每支队伍的设计方案,在国际比赛中,2012年亚太机器人大赛主办方将为每队粘贴标签,代表队向主办方提供他们的通行证软件设计方案,详细内容将以后给出。
2.12通行证杆2.12.1通行证杆放置在手动区,它包含三个部分:一个构架,一个杆和一个底座,弧形框架采用低碳钢制成,里面有凹槽。
2.12.2框架的厚度是40mm,凹槽宽度是22mm,通行证杆直径40mm,高度742mm,通行证杆的基座是直径350mm,厚度3mm的低碳钢制成。
2.13桥2.13.1桥在自动机器人区,它是一个梯形体,长3500mm,宽1970mm,高300mm。
2.14障碍物2.14.1木制障碍物高100mm,厚50mm,放置在手动区和自动区,机器人必须在障碍物提供的Z形路径里行驶。
3比赛步骤和任务3.1在比赛开始之前,手动操作手骑在手动机器人上。
3.2手动操作手驾驶手动机器人从手动机器人启动区到通行证站。
3.3手动机器人取走门票。
3.4手动操作手驾驶手动机器人到达隧道处。
3.5到达隧道处,手动机器人将通行证插入通行证盒子里。
手动机器人的任何部分不允许接触通行证盒子。
第一次穿过隧道时在没有将通行证投放到盒子中之前,手动机器人不允许穿过隧道。
3.6当通行证被完全放入盒子时,裁判给以开始信号,自动机器人才可以自动或者由一个操作者按下开始按键启动。
自动机器人可以抓起存放在公共区的篮筐将其放在手动区的任何位置。
自动机器人也可以延后启动作为策略。
当篮筐被放在手动区,篮筐的底部坐立在该区域时,这项任务被认为完成。
此时,篮筐和手动机器人、自动机器人不接触。
3.7每个参赛队的自动机器人只允许接触存放在公共区的两个篮筐的一个,并且参赛队仅仅可以抓起之前接触过的篮筐。
3.8手动机器人穿过隧道进入馒头机器人启动区。
3.9手动机器人在馒头机器人启动区装载馒头机器人。
3.10手动机器人携带馒头机器人穿过Z字形路。
3.11当手动机器人的所有接触面完全进入装卸区1时,手动机器人可以将馒头机器人卸下。
仅仅在在卸下馒头机器人时,手动机器人可以延伸其机构在自动机器人启动区的上方。
在卸载过程中馒头机器人不允许接触任何比赛场地。
3.12当馒头机器人完全与手动机器人分离并且被转移到自动机器人上时,自动机器人可以自动启动也可以由操作手通过按键启动。
没有规定自动机器人抓起篮筐和馒头机器人的顺序。
参赛队可以同时抓起。
3.13自动机器人携带馒头机器人穿过桥到达L2区或者L3区。
3.14在将馒头机器人转移到自动机器人上后,手动机器人才允许抓起存放在手动区的篮筐并将其放在岛上的篮筐区。
当篮筐放在该区后不允许任何机器人接触该篮筐。
3.15自动机器人必须在L2或者L3区将馒头机器人卸下,在被卸下之前馒头机器人不允许接触比赛场地。
3.16馒头机器人可以离开自动机器人并从L2区爬上岛旁边的台阶,也可以在L3区被手动机器人举高到岛上。
3.17馒头机器人可以由按钮被自动机器人或手动机器人开启,或者由自动机器人或馒头机器人发送非射频信号使馒头机器人自启动。
3.18当手动机器人举起馒头机器人并和馒头机器人接触时,馒头机器人可以接收手动机器人的命令。
在接触时,允许手动机器人与馒头机器人以非射频通信方式通讯。
3.19当馒头机器人在岛上并且未与手动机器人接触时,馒头机器人可以把在中间层和底层的馒头拿起并放到篮筐里,馒头只有被拿起并明确放入篮筐,馒头才算有效。
如果馒头掉到了地上,则不能再用。
3.20馒头机器人只能拿馒头塔上属于自己这边的馒头,如果拿对方塔那边的馒头或者进入对方的区域上空,将视为违规;3.21手动机器人可以在比赛的最后一分钟直接从馒头塔的底层拿起馒头,所以比赛开始的2分钟不允许从上部两层拿馒头;3.22至少各有一个馒头从底层和中间层被馒头机器人拿起并放入篮筐里之后,这时馒头机器人可以被手动机器人从岛上举起去接触最顶层的馒头。
3.23只有馒头放到比赛所用的篮筐里时才有效;3.24一旦馒头机器人成功把顶层馒头放入篮筐,并且在这之前至少各有一个馒头从底层和中间层被拿起并放入篮筐里,比赛立即结束。
这叫做“Peng On Dai Gat”.假如两队在3分钟内都没有完成“Peng On Dai Gat”.那么在比赛中得分多的队伍获胜。
4.重启区4.1在机械故障或任务的失败的情况下,机器人可以带回其重新启动,重新启动须经裁判的同意。
重启区设置如下:4.2手动机器人重启区M(手动机器人离开手动机器人的启动区(M)后)。
4.2.1如果通行证没有成功放入通行证盒子,手动机器人需要重新回到手动机器人启动区(M)重新启动,通行证放回原处。
4.2.2手动机器人必须使用M区,直到它已完全进入S1。
4.3手动机器人重启区S1(手动机器人成功地通过隧道后)4.3.1如果手动机器人转移馒头机器人到自动机器人上失败,手动机器人必须在重启区S1重新启动,馒头机器人被放回馒头机器人启动区(C)。
4.3.2手动机器人如果没有拿起篮筐或者没有成功把篮筐放到岛上的篮筐区,手动机器人必须在重启区S1重启。