H桥式电机驱动电路
H桥驱动电路(通用)
一、背景此问题一直想留给做小车的同学去研讨,期望他们在制作过程中能够悟出其中的道理。
可无奈等至今日也未见一文半字 : ( 却接到了无数的质询:你为何要用分立元件构建 H 桥驱动?为何不选择 L298 集成电路桥?为何要使用 MOS 管?等等……,逐个回复太累了,只好整理一下,汇总于此,供参考,有不妥之处望指正,更望能有人提出进一步的分析。
二、分析内容界定本文只涉及有刷直流电机 H 桥驱动部分的电路,不讨论如何控制 H 桥?如何实现 PWM?以及如何实现过流保护等;而且主要讨论构成 H 桥 4 个桥臂对性能的影响。
三、H桥原理简述所谓 H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下:从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关 A、D接通,电机为正向转动,则开关B、C接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
借助这 4 个开关还可以产生电机的另外 2 个工作状态:A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。
B)惰行—— 4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。
以上只是从原理上描述了H 桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。
细分下来,晶体管有双极性和MOS管之分,而集成电路只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。
双极性晶体管构成的 H 桥:MOS管构成的 H 桥:以下就分析一下这些电路的性能差异。
四、几种典型 H 桥驱动电路分析分析之前,首先要确定 H 桥要关注那些性能:A)效率——所谓驱动效率高,就是要将输入的能量尽量多的输出给负载,而驱动电路本身最好不消耗或少消耗能量,具体到H桥上,也就是4个桥臂在导通时最好没有压降,越小越好。
直流电机H桥驱动电路

直流电机H桥驱动电路H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动。
一、H桥驱动电路所谓 H 桥驱动电路是为直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下:从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关A、D接通,电机为正向转动,则开关B、C 接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
借助这4个开关还可以产生电机的另外2个工作状态:A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。
B)惰行——4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。
以上只是从原理上描述了H桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。
细分下来,晶体管有双极性和MOS管之分,而集成电路(例如L298)只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。
双极性晶体管构成的 H 桥:MOS管构成的 H 桥:二、使能控制和方向逻辑驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管TA和TB同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
大功率直流电机H桥驱动电路设计方案

大功率直流电机H桥驱动电路设计方案在直流电机驱动电路的设计中,主要考虑一下几点:1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4 个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2. 性能:对于PWM 调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H 桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或光电耦合器实现隔离。
4)对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5)可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
H桥驱动电路:H桥式电机驱动电路包括4个三极管和一个电机,因其外形酷似字母‘H',所以称作H桥驱动电路。
要使电机M运转,必须使对角线上的一对三极管导通。
例如当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
电机顺时针转动。
当三极管Q2和Q3导通时,电流将从右至左流过电机,驱动电机逆时针方向转动。
完整的晶体管H桥驱动电路,PWM1,PWM2,为电机方向控制输入端,PWM1=1,PWM2=0时正转,PWM=0,PWM2=1时电机反转。
PWM1,PWM2同时也是电机调速的脉宽输入端。
晶体管是最为廉价的控制方法,但在晶体管上有明显的压降,会产生功率的损耗,效率不高,适宜应用在低电压,小功率的场合。
H桥电路原理图
H桥电路原理图————————————————————————————————作者:————————————————————————————————日期:H 桥电路原理及直流电机驱动编程标签:h 桥电路原理 分类: MCS-51单片机上图中所示为一个典型的直流电机控制电路。
电路得名于“H 桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
要使电机运转,必须使对角线上的一对三极管导通。
例如,如下图所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
上图所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
典型的H桥驱动电路如下:PWM1为1,PWM2为1时,Q1和Q2导通,节点1和2都是低电平,Q15和Q16导通,电机不工作PWM1为0,PWM2为0时,Q1和Q2不导通,节点1和2都是高电平,Q13和Q14导通,电机不工作PWM1为1,PWM2为0时,Q1导通而Q2不导通,节点1是低电平而2是高电平,Q14和Q15导通,电机逆时针旋转PWM1为0,PWM2为1时,Q1不导通而Q2导通,节点1是高电平而2是低电平,Q13和Q16导通,电机顺时针旋转C语言代码:功能:能是电机正转,逆转,停止。
H桥式电机驱动电路

本文摘自:《机器人探索》一、H桥式电机驱动电路图4.12中所示为一个典型的直流电机控制电路。
电路得名于“H桥式驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图4.12 H桥式电机驱动电路要使电机运转,必须使对角线上的一对三极管导通。
例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图4.14 H桥电路驱动电机逆时针转动二、使能控制和方向逻辑驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图4.155所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
而2个非门通过提供(与本节前面的示意图一样,一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
电机h桥驱动电路工作原理
电机h桥驱动电路工作原理电机H桥驱动电路是电机驱动的一种重要方式,电子系统中经常会使用到,比如机器人、车辆控制等等。
本文将详细介绍电机H桥驱动电路的工作原理,以及应用场景。
一、H桥驱动电路概述H桥指的是由四个开关管或者MOS管组成的桥式电路。
这种电路有多种电机驱动方式,其中最常见的是单向直流电机的正反转控制。
通过对四个开关管进行控制,可以实现电机的正反转和制动等功能。
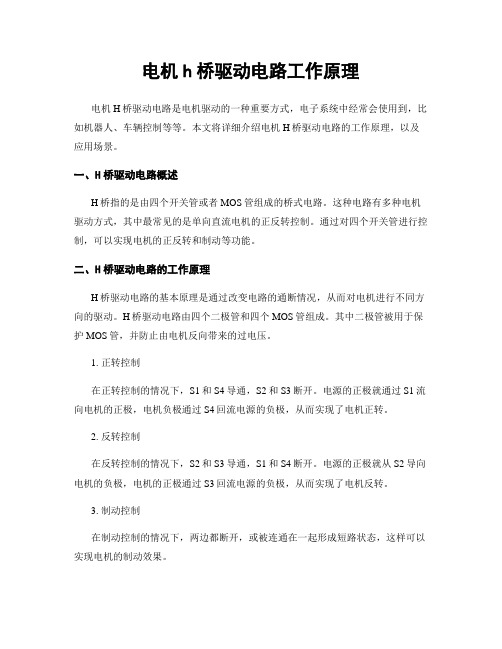
二、H桥驱动电路的工作原理H桥驱动电路的基本原理是通过改变电路的通断情况,从而对电机进行不同方向的驱动。
H桥驱动电路由四个二极管和四个MOS管组成。
其中二极管被用于保护MOS管,并防止由电机反向带来的过电压。
1. 正转控制在正转控制的情况下,S1和S4导通,S2和S3断开。
电源的正极就通过S1流向电机的正极,电机负极通过S4回流电源的负极,从而实现了电机正转。
2. 反转控制在反转控制的情况下,S2和S3导通,S1和S4断开。
电源的正极就从S2导向电机的负极,电机的正极通过S3回流电源的负极,从而实现了电机反转。
3. 制动控制在制动控制的情况下,两边都断开,或被连通在一起形成短路状态,这样可以实现电机的制动效果。
4. 制动后反转如果电机在制动状态下需要反转,那么可以先将电机停下,再进行反转操作,这样可以得到较好的反转效果。
三、H桥驱动电路的应用场景H桥驱动电路广泛应用于机器人、车辆、船舶等控制系统中,在这些应用场景中,电机是控制系统的一个非常关键的组成部分。
H桥驱动电路不仅可以实现电机的正反转控制,还可以用于调速控制、测速控制等多种应用场景中。
1. 机器人应用机器人在工业自动化、医疗保健、家庭助理、智能安防等众多领域都有广泛的应用。
机器人的驱动系统主要是电机驱动,而H桥驱动电路是机器人驱动系统中的重要组成部分。
机器人需要精准的控制,以实现复杂的动作,H桥驱动电路可以实现电机的正反转控制,同时还能同时控制多个电机,实现机器人的多自由度自由移动。
H桥电路原理图
H桥电路原理及直流电机驱动编程分类:MCS-51单片机标签:h桥电路原理上图中所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H.4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
要使电机运转,必须使对角线上的一对三极管导通。
例如,如下图所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经 Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动.当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
上图所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向).典型的H桥驱动电路如下:PWM1为1,PWM2为1时,Q1和Q2导通,节点1和2都是低电平,Q15和Q16导通,电机不工作PWM1为0,PWM2为0时,Q1和Q2不导通,节点1和2都是高电平,Q13和Q14导通,电机不工作PWM1为1,PWM2为0时,Q1导通而Q2不导通,节点1是低电平而2是高电平,Q14和Q15导通,电机逆时针旋转PWM1为0,PWM2为1时,Q1不导通而Q2导通,节点1是高电平而2是低电平,Q13和Q16导通,电机顺时针旋转C语言代码:功能:能是电机正转,逆转,停止。
#include<AT89X52。
h〉#define uchar unsigned char#define uint unsigned intsbit Key_UP=P3^2; //正转按键sbit Key_DOWN=P3^3; //反转按键sbit Key_STOP=P3^4; //停止按键sbit ZZ=P1^0; //控制端,用单片机的P1.0口sbit FZ=P1^1; //控制端,用单片机的P1。
h桥驱动电路工作原理
h桥驱动电路工作原理嗨,小伙伴!今天咱们来唠唠这个超有趣的H桥驱动电路的工作原理哈。
你可以把H桥驱动电路想象成一个超级交通枢纽,就像那种有好多条路可以走的大十字路口。
这个电路主要是用来控制电机的,不管是直流电机正转、反转还是刹车,它都能搞定呢。
咱先说说这个H桥的结构吧。
它长得就像一个字母“H”,所以才叫H桥。
这个“H”的四条“腿”呢,可都是很有讲究的。
每一条“腿”上都连接着一个电子元件,一般是晶体管之类的,就像每个路口都有一个小交警在指挥交通一样。
当我们想要电机正转的时候呀,就像是要让车朝着一个方向顺利行驶。
这时候呢,H桥的其中两个对角线上的元件就开始工作啦。
比如说左上角和右下角的元件就像是打开了绿灯,电流就从电源经过这两个元件,然后顺利地流到电机里面,电机就欢快地正转起来啦。
这个过程就好像是给电机注入了一股正能量,让它朝着我们期望的方向转动。
那要是想让电机反转呢?这就像让车掉头往回开。
这时候就轮到另外两个对角线的元件大显身手啦,也就是右上角和左下角的元件开始工作。
电流就会改变方向,从电源经过这两个元件再到电机,电机就会按照相反的方向转动起来。
是不是很神奇呢?就像这个电路有魔法一样,能轻松改变电机的转动方向。
还有刹车的情况呢。
这就好比是突然在路中间设置了一个大障碍物,让车停下来。
在H桥驱动电路里,要实现刹车,就是让电机的两端都接到电源或者地,这样电机就没有办法转动啦。
就像是电机突然被定住了一样,它想动也动不了咯。
这个H桥驱动电路在很多地方都超级有用呢。
比如说在那些小小的遥控汽车里面,就是靠这个电路来控制汽车前进、后退的。
还有那些电动小风扇,如果想要它能正反转来调节风向,也可以用到H桥驱动电路。
不过呢,这个电路也不是没有小脾气的。
在实际应用的时候呀,要特别注意元件的选择。
如果选的晶体管功率不够大,就像小交警没有足够的力气指挥交通一样,可能就没办法让电机正常工作啦。
而且呢,在切换电机正反转的时候,也要小心一点,就像车辆掉头的时候要注意周围的情况一样,要是切换得太快或者太突然,可能会对电路或者电机造成不好的影响呢。
h桥直流电机驱动电路
h桥直流电机驱动电路H桥直流电机驱动电路是一种常用的电子电路,用于控制直流电机的转动方向和速度。
它由四个开关器件和一个直流电源组成,能够根据输入信号来控制电机的正转、反转以及停止。
本文将详细介绍H桥直流电机驱动电路的工作原理和应用。
我们来了解一下H桥直流电机驱动电路的基本结构。
H桥电路由四个开关器件组成,通常使用晶体管或功率MOSFET作为开关器件。
这四个开关器件分为上桥臂和下桥臂,上桥臂的两个开关器件分别连接于电机的一个端子和电源的正极,下桥臂的两个开关器件分别连接于电机的另一个端子和电源的负极。
通过控制这四个开关器件的通断状态,可以改变电机的电流流向,从而实现电机的正转、反转和停止。
接下来,我们来详细说明H桥直流电机驱动电路的工作原理。
当上桥臂的两个开关器件都关闭时,上桥臂与电机形成闭环,电流从电源正极流向电机,电机正转;当上桥臂的两个开关器件都打开时,上桥臂与电机断开,电机停止转动。
同样地,当下桥臂的两个开关器件都关闭时,下桥臂与电机形成闭环,电流从电机流向电源负极,电机反转;当下桥臂的两个开关器件都打开时,下桥臂与电机断开,电机停止转动。
通过这种方式,可以实现电机的正转、反转和停止。
H桥直流电机驱动电路的控制信号通常由微控制器或其他数字电路产生。
控制信号的频率通常在几十kHz到几百kHz之间,可以通过PWM(脉宽调制)技术来实现。
PWM技术通过改变开关器件的通断时间比例来控制电机的转速。
通断时间比例越大,电机的平均电流越大,转速越快;通断时间比例越小,电机的平均电流越小,转速越慢。
通过调整PWM的占空比,可以实现电机的速度调节。
H桥直流电机驱动电路不仅可以控制电机的转向和转速,还可以实现动态制动和能量回收。
动态制动是指通过改变电机的工作状态,将电机的转动能量转化为电能,并回馈到电源中,实现能量的回收和再利用。
这种制动方式可以提高系统的能量利用效率,降低能耗。
另外,H桥直流电机驱动电路还可以实现电机的电磁刹车,即通过改变电机回路的状态,使电机产生反电动势,从而使电机停止转动。
H桥式电机驱动电路的工作原理
H桥式电机驱动电路的工作原理H桥式电机驱动电路是一种常用于直流电机驱动的电路,可以控制电机的转向和转速。
这一电路主要由四个开关器件组成,通常使用MOSFET或IGBT作为开关器件,通过对这四个开关器件的控制,可以实现对电机的正转、反转、刹车等操作。
1.电源供电:电源的正负极分别接在H桥电路的两个“供电接口”上,以提供工作电压给电机驱动电路。
2.控制信号:通过对控制信号的控制,可以实现对电机的正转、反转和刹车功能。
控制信号通过控制信号输入端接入到电子控制系统,电子控制系统通过对控制信号进行处理,产生相应的控制信号。
3.开关管的控制:H桥式电机驱动电路中的四个开关器件可以分为上半桥和下半桥,每个半桥包含两个开关器件。
当上半桥的两个开关器件打开,下半桥的两个开关器件关闭时,电流从电源的正极出发,经过上半桥的开关管、电机,最终回到电源的负极,电机就会正转。
当上半桥的两个开关器件关闭,下半桥的两个开关器件打开时,电流则会从电源的负极出发,经过下半桥的开关管、电机,最终回到电源的正极,电机就会反转。
在控制信号的作用下,电子控制系统可以通过对开关器件的开关控制,来实现电机的转向控制。
4.PWM控制:为了实现电机的转速控制,通常采用PWM(脉宽调制)技术。
通过对开关管的开关频率和占空比进行调整,控制电机的平均电压大小,从而实现对电机转速的控制。
5.刹车功能:当需要刹车时,可以通过控制开关管的开关状态,将电机的两个端子短接在一起,产生刹车电压,使电机快速停止运动。
总结起来,H桥式电机驱动电路通过控制开关器件的开合状态,通过PWM技术控制电机的平均电压大小,从而实现对电机的转向和转速的精确控制。
这一电路在机器人、自动化设备、汽车行业等领域得到广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文摘自:《机器人探索》
一、H桥式电机驱动电路
图4.12中所示为一个典型的直流电机控制电路。
电路得名于“H桥式驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图4.12 H桥式电机驱动电路
要使电机运转,必须使对角线上的一对三极管导通。
例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动
图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图4.14 H桥电路驱动电机逆时针转动
二、使能控制和方向逻辑
驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路
上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图4.155所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
而2个非门通过提供
(与本节前面的示意图一样,一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
图4.15所示也不是一个完整的电路图,特别是图中与门和三极管直接连接是不能正常工作的。
)
图4.15 具有使能控制和方向逻辑的H桥电路
采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。
如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三极管Q1和Q4导通,电流从左至右流经电机(如图4.16所示);如果DIR-L信号变为1,而DIR-R信号变为0,那么Q2和Q3将导通,电流则反向流过电机。
图4.16 使能信号与方向信号的使用
实际使用的时候,用分立件制作H桥式是很麻烦的,好在现在市面上有很多封装好的H桥集成电路,接上电源、电机和控制信号就可以使用了,在额定的电压和电流内使用非常方便可靠。
比如常用的L293D、L298N、TA7257P、SN754410等。
在典型H型驱动电路的基础上,给出了增加两只二极管保护驱动管的改进电路,并对其原理和特点进行了分析和讨论.
驱动电路的性能很大程度上影响整个系统的工作性能。
有许多问题需要慎重设计,例如,
导通延时、泵升保护、过压过流保护、开关频率、附加电感的选择等。
1.开关频率和主回路附加电感的选择
力矩波动也即电流波动,由系统设计给定的力矩波动指标为ΔI/IN,对有刷直流电动机而言,通常在(5~10)%左右。
为了便于分析可认为
ΔI/IN=ΔI/(Us/Rd) (1)
式中Rd为电枢回路总电阻。
代入前面各种驱动控制方式的ΔI表达式中,消去Us,可求出:
对于单极性控制
&nbs
p; Ld/Rd≥5T~2.5T(可逆或不可逆) (2)
对于双极性控制
Ld/Rd≥10T~5T (3)
式中T为功率开关的开关周期。
对于有刷直流电动机,电磁时间常数Ld/Rd一般在10ms至几十毫秒。
若采用GTR,开关频率可取2KHz左右,T=0.5ms。
若采用IGBT,开关频率可取18KHz以上,所以上式均能满足。
若采用GTO或可控硅功率器件,由于工作频率只有100Hz左右,此时应考虑在主回路附加电抗器,且
Ld="Lf"+La (4)
对不可逆系统还应进一步检查临界电流,IaL=UsT/8Ld≤Ia0应小于电机空载电流,防止空载失控。
对于低惯量电机、力矩电动机,由于电磁时间常数很小(几个毫秒或更小),此时应考虑采用开关频率高的IGBT功率开关器件。
2. 功率驱动电路的选择
图1 H桥开关电路(Ⅰ) & nbsp; 图2 H桥开关电路(Ⅱ)
小功率驱动电路可以采用如图1所示的H桥开关电路。
UA和UB是互补的双极性或单极性驱动信号,TTL电平。
开关晶体管的耐压应大于1.5倍Us以上。
由于大功率PNP晶体管价格高,难实现,所以这个电路只在小功率电机驱动中使用。
当四个功率开关全用NPN 晶体管时,需要解决两个上桥臂晶体管(BG1和BG3)的基极电平偏移问题。
图2中H桥开关电路利用两个晶体管实现了上桥臂晶体管的电平偏移。
但电阻R上的损耗较大,所以也只能在小功率电机驱动中使用。
当驱动功率比较大时,一般桥臂电压也比较高,例如直接取工频电压,单相220V,或三相380V。
为了安全和可靠,希望驱动回路(主回路)与控制回路绝缘。
此时,主回路必须采用浮地前置驱动。
图3所示的浮地前置驱动电路都是互相独立的,并由独立的电源供电。
由于前置驱动电路中采用了光电耦合,使控制信号分别与各自的前置驱动电路电气绝缘,于是使控制信号对主回路浮地(或不共地)。
图3 大功率驱动电路
3. 具有光电耦合绝缘的前置驱动电路
对于大功率驱动系统,希望将主回路与控制回路之间实行电气隔离,此时常采用光电耦合电路来实现。
有三种常用的光电耦合电路如图4所示,其中普通型的典型型号是4N25、117等,高速型的典型型号有985C,高电流传输比型也称达林顿型,典型型号有113等。
图4 典型光电耦合器电路
图中,普通型光耦的Ic/Id=0.1~0.3;高速型光耦采用光敏二极管;高电流传输比型光耦的Ic/Id=0.5;它们的上升延时时间和关断延时时间分别为tr,ts>4~5μs;tr,ts<1.5μs;tr,ts为10μs左右。
光电耦合器与后续电路结合就能构成前置驱动电路,如图5所示。
这个前置驱动电路的上升延时tr——3.9μs,关断延时ts——1.6μs,可以在中等功率系统中使用。
图5 前置驱动电路
为了对功率开关提供最佳前置驱动,现在已有很多专用的前置驱动模块。
这种驱动模块对功率开关提供理想前置驱动信号,保证功率开关迅速导通,迅速关断,对功率开关的饱和深度进行最佳控制,对功率开关的过电流、过热进行检测和保护。
例如,EX356、EX840等等。
4. 防直通导通延时电路
对H桥驱动电路上下桥臂功率晶体管加互补信号,由于带载情况下,晶体管的关断时间通常比开通时间长,这样,例如当下桥臂晶体管未及时关断,而上桥臂抢先开通时就出现所谓“桥臂直通”故障。
桥臂直通时电流迅速变大,造成功率开关损坏。
所以设置导通延时,是必不可少的。
图6是导通延时电路及其波形。
图6 导通延时电路及波形
导通延时,有时也称死区时间,可通过RC时间常数来设置;对GTR可按0.2μs/A来设置;对MOSFET可按0.1~0.2μs设计,且与电流无关,IGBT可按2~5μs设计。
举例说明,若为GTR,f=5kHz,双极性工作,调宽区域为T/2=1/10=0.1ms。
若I=100A,则Δt=0.2X100=20μs,则PWM调制分辨率最大可能性为
(T/2)Δt=0.1/0.02=5 (5)
这说明死区时间占据了调制周期的1/5,显然是不可行的。
所以对于100A的电机系统,GTR的开关频率必须低于5kHz。
例如,2kHz以下,此时分辨率达12.5左右。
驱动电路的设计还有很多问题,例如过压、过流、过热、泵升保护等等。
H型驱动电路的改进:万方数据。