DSP实验程序及结果
dsp原理与应用实验报告总结

dsp原理与应用实验报告总结DSP(Digital Signal Processing)数字信号处理是利用数字技术对信号进行处理和分析的一种方法。
在本次实验中,我们探索了DSP的原理和应用,并进行了一系列实验以验证其在实际应用中的效果。
以下是对实验结果的总结与分析。
实验一:数字滤波器设计与性能测试在本实验中,我们设计了数字滤波器,并通过性能测试来评估其滤波效果。
通过对不同类型的滤波器进行设计和实现,我们了解到数字滤波器在信号处理中的重要性和应用。
实验二:数字信号调制与解调本实验旨在通过数字信号调制与解调的过程,了解数字信号的传输原理与方法。
通过模拟调制与解调过程,我们成功实现了数字信号的传输与还原,验证了调制与解调的可行性。
实验三:数字信号的傅里叶变换与频谱分析傅里叶变换是一种重要的信号分析方法,可以将信号从时域转换到频域,揭示信号的频谱特性。
本实验中,我们学习了傅里叶变换的原理,并通过实验掌握了频谱分析的方法与技巧。
实验四:数字信号的陷波滤波与去噪处理陷波滤波是一种常用的去除特定频率噪声的方法,本实验中我们学习了数字信号的陷波滤波原理,并通过实验验证了其在去噪处理中的有效性。
实验五:DSP在音频处理中的应用音频处理是DSP的一个重要应用领域,本实验中我们探索了DSP在音频处理中的应用。
通过实验,我们成功实现了音频信号的降噪、均衡和混响处理,并对其效果进行了评估。
实验六:DSP在图像处理中的应用图像处理是另一个重要的DSP应用领域,本实验中我们了解了DSP在图像处理中的一些基本原理和方法。
通过实验,我们实现了图像的滤波、边缘检测和图像增强等处理,并观察到了不同算法对图像质量的影响。
通过以上一系列实验,我们深入了解了DSP的原理与应用,并对不同领域下的信号处理方法有了更深刻的认识。
本次实验不仅加深了我们对数字信号处理的理解,也为日后在相关领域的研究与实践提供了基础。
通过实验的结果和总结,我们可以得出结论:DSP作为一种数字信号处理的方法,具有广泛的应用前景和重要的实际意义。
DSP实验报告6

DSP第六、七次实验报告1. 实验目的:(1)进一步熟悉Matlab实验环境和语言。
(2)熟悉各种滤波器的结构及Matlab实现语言。
(3)掌握用冲击响应不变法和双线性变换法设计IIR滤波器的方法。
(4)掌握用窗函数法和频率抽样法设计FIR滤波器的方法。
2. 实验内容及总结:1.滤波器结构:(1)IIR滤波器各种结构1、直接型结构例如直接型滤波器系统函数, 则有系数向量a=[1,a1,a2,a3],b=[b0,b1,b2], 利用:Y=filter[b,a,x]求信号x(n)通过此滤波器的输出。
2、由系统函数或差分方程求系统的二阶分式(含一阶分式)的级联结构将例如的系统函数重写为二阶分式节的级联型, 利用:[sos,G]=tf2sos(b,a)3、由二阶分式的级联结构转换成系统函数的直接结构是第二步的逆运算, 调用函数:[b,a] = sos2tf(sos)可以求得系数向量a,b, 从而得到H(z)4、由系统函数求部分分式展开(留数及其极点计算)即求z反变换的部分分式展开法, 利用:[r,p,c]=residuez(b,a)其中极点为p, 留数为r, 直接项系数为c。
5、由r,p,c求系统函数即第4步的逆运算, 利用:[b,a]=residuez(r,p,c)6、由直接型结构转换为并联型结构需开发函数:[C,B,A]=tf2par(b,a)其中, b,a为直接型的系数向量, C,B,A为并联型实系数向量, 基本思想是: 1.反复调用[r,p,c]=residuez(b,a)求出极点及留数;2.利用cplxpair函数把极点、留数对按复共轭极点-留数对, 实极点-留数对的顺序排列;3.开发cplxcomp函数, 保证极点和留数相互对应;4.调用[b,a]=residuez(r,p,c)计算并联二阶节的分子分母。
7、由并联型结构转换成直接型结构开发函数:[b,a]=par2tf(C,B,A)为[C,B,A]=tf2par(b,a)的逆函数。
dsp课程设计实验报告

DSP课程设计实验语音信号的频谱分析:要求首先画出语音信号的时域波形, 然后对语音信号进行频谱分析。
在MATLAB中, 可以利用函数fft对信号进行快速傅立叶变换, 得到信号的频谱特性, 从而加深对频谱特性的理解。
其程序为:>> [y,fs,bits]=wavread('I:\xp.wav',[1024 5120]);>> sound(y,fs,bits);>> Y=fft(y,4096);>> subplot(221);plot(y);title('原始信号波形');>> subplot(212);plot(abs(Y));title('原始信号频谱');程序运行结果为:设计数字滤波器和画出频率响应:根据语音信号的特点给出有关滤波器的性能指标:低通滤波器性能指标, =1000Hz, =1200Hz, =100dB, =1dB;高通滤波器性能指标, =4800Hz, =5000Hz, =100dB, =1dB;带通滤波器性能指标, =1200Hz, =3000Hz, =1000Hz, =3200Hz, =100dB, =1dB;要求学生首先用窗函数法设计上面要求的三种滤波器, 在MATLAB中, 可以利用函数firl 设计FIR滤波器;然后再用双线性变换法设计上面要求的三种滤波器, 在MA TLAB中, 可以利用函数butte、cheby1和ellip设计IIR滤波器;最后, 利用MATLAB中的函数freqz画出各种滤波器的频率响应, 这里以低通滤波器为例来说明设计过程。
低通:用窗函数法设计的低通滤波器的程序如下:>> fp=1000;fc=1200;As=100;Ap=1;fs=22050;>> wc=2*fc/fs;wp=2*fp/fs;>> N=ceil((As-7.95)/(14.36*(wc-wp)/2))+1;>> beta=0.1102*(As-8.7);>> Win=Kaiser(N+1,beta);>>b=firl(N,wc,Win);>>freqz(b,1,512,fs);程序运行结果:这里选用凯泽窗设计, 滤波器的幅度和相位响应满足设计指标, 但滤波器长度(N=708)太长, 实现起来很困难, 主要原因是滤波器指标太苛刻, 因此, 一般不用窗函数法设计这种类型的滤波器。
DSP实验报告_6
实验一: 闪灯实验熟悉DSP 软硬件测试系统实验目的1.了解SHARC 系列高性能数字信号处理器的程序开发过程和编程语言;2.熟悉集成开发工具VisualDSP++, 学会使用VisualDSP++进行SHARC 系列ADSP 的程序开发、编译与调试;3.掌握SHARC 系列ADSP 的程序加载设计和加载过程。
实验内容利用波形产生信号板, 结合FPGA 编程技术和程序编程器, 编写测试ADSP21065L 和FPGA 之间硬件连接的应用程序, 同时完成应用程序的加载和脱机操作, 在信号指示灯“HL2”上产生可调周期的脉冲信号, “点亮”与“熄灭”指示灯HL2。
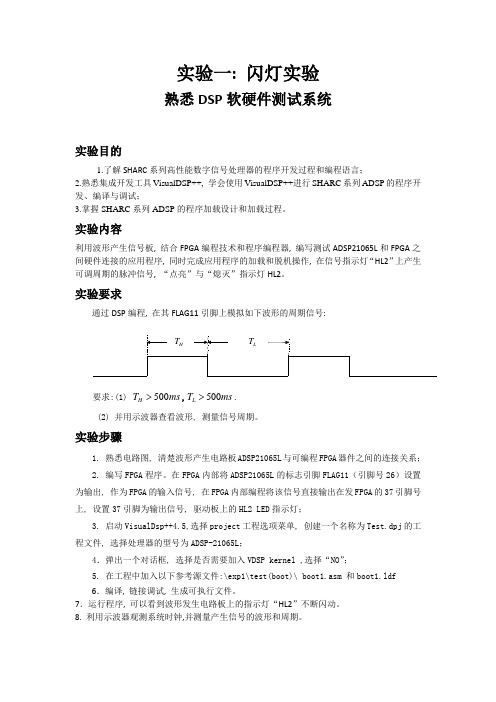
实验要求通过DSP 编程, 在其FLAG11引脚上模拟如下波形的周期信号:要求:(1) 500H T ms >,500L T ms >. (2) 并用示波器查看波形, 测量信号周期。
实验步骤1. 熟悉电路图, 清楚波形产生电路板ADSP21065L 与可编程FPGA 器件之间的连接关系;2. 编写FPGA 程序。
在FPGA 内部将ADSP21065L 的标志引脚FLAG11(引脚号26)设置为输出, 作为FPGA 的输入信号, 在FPGA 内部编程将该信号直接输出在发FPGA 的37引脚号上, 设置37引脚为输出信号, 驱动板上的HL2 LED 指示灯;3. 启动VisualDsp++4.5,选择project 工程选项菜单, 创建一个名称为Test.dpj 的工程文件, 选择处理器的型号为ADSP-21065L ;4.弹出一个对话框, 选择是否需要加入VDSP kernel ,选择“NO ”;5. 在工程中加入以下参考源文件:\exp1\test(boot)\ boot1.asm 和boot1.ldf 6.编译, 链接调试, 生成可执行文件。
7.运行程序, 可以看到波形发生电路板上的指示灯“HL2”不断闪动。
8. 利用示波器观测系统时钟,并测量产生信号的波形和周期。
dsp实验报告

dsp实验报告实验一:CCS入门实验实验目的:1. 熟悉CCS集成开发环境,掌握工程的生成方法;熟悉SEED-DEC643实验环境; 掌握CCS集成开发环境的调试方法。
2.学习用标准C 语言编写程序;了解TI CCS开发平台下的C 语言程序设计方法和步骤; 熟悉使用软件仿真方式调试程序。
3. 学习用汇编语言编写程序; 了解汇编语言与 C 语言程序的区别和在设置上的不同;了解TMS320C6000 汇编语言程序结果和一些简单的汇编语句用法学习在CCS 环境中调试汇编代码。
4. 在了解纯C 语言程序工程和汇编语言程序工程结构的基础上,学习在C 工程中加入汇编编程的混合编程方法; 了解混合编程的注意事项;理解混合编程的必要性和在什么情况下要采用混合编程5. 熟悉CCS集成开发环境,掌握工程的生成方法; 熟悉SEED-DEC643实验环境;掌握CCS集成开发环境的调试方法。
实验原理:CCS 提供了配置、建立、调试、跟踪和分析程序的工具,它便于实时、嵌入式信号处理程序的编制和测试,它能够加速开发进程,提高工作效率。
CCS 提供了基本的代码生成工具,它们具有一系列的调试、分析能力序。
使用此命令后,要重新装载.out 文件后,再执行程序。
使用 CCS常遇见文件简介1. program.c: C 程序源文件;2. program.asm: 汇编程序源文件;3. filename.h: C 程序的头文件,包含DSP/BIOS API模块的头文件;4. filename.lib: 库文件;5. project.cmd: 连接命令文件;6. program.obj: 由源文件编译或汇编而得的目标文件;7. program.out: 经完整的编译、汇编以及连接后生成可执行文件; 8. program.map: 经完整的编译、汇编以及连接后生成空间分配文件; 9.project.wks: 存储环境设置信息的工作区文件。
P.S(CMD文件中常用的程序段名与含义1. .cinit 存放C程序中的变量初值和常量;2. .const 存放C程序中的字符常量、浮点常量和用const声明的常量;3. .text 存放C程序的代码;4. .bss 为C 程序中的全局和静态变量保留存储空间;5. .far 为C 程序中用far声明的全局和静态变量保留空间;6. .stack 为 C 程序系统堆栈保留存储空间,用于保存返回地址、函数间的参数传递、存储局部变量和保存中间结果;7. .sysmem 用于 C 程序中malloc、calloc 和 realloc 函数动态分配存储空间。
DSP实验报告最终版
小组成员
一、实验说明:
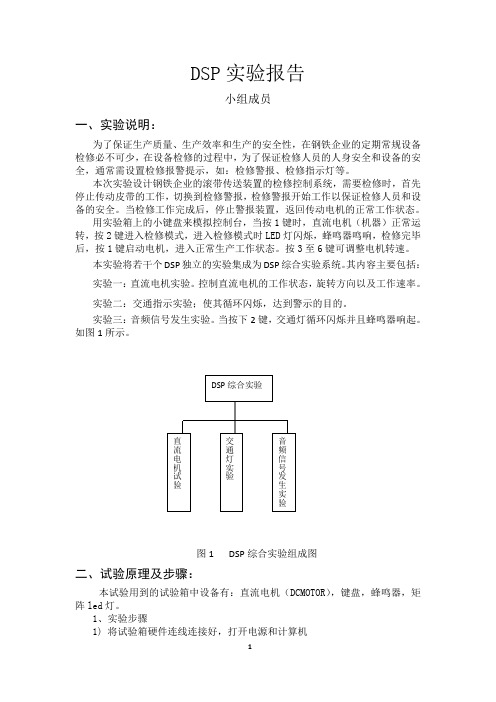
为了保证生产质量、生产效率和生产的安全性,在钢铁企业的定期常规设备检修必不可少,在设备检修的过程中,为了保证检修人员的人身安全和设备的安全,通常需设置检修报警提示,如:检修警报、检修指示灯等。
本次实验设计钢铁企业的滚带传送装置的检修控制系统,需要检修时,首先停止传动皮带的工作,切换到检修警报,检修警报开始工作以保证检修人员和设备的安全。当检修工作完成后,停止警报装置,返回传动电机的正常工作状态。
南-绿
北-红
北-黄
北-绿
两个寄存器的地址均映射到2812DSP的扩展空间,CTRLR,DSP通过对该地址的写操作来修改二个寄存器各位的状态,当寄存器某位取‘1’时,相应提示灯被点亮,取‘0’则熄灭。当写入CTRLR的数据(8位有效值)的高两位为‘00’时,数据的低6位将写入EWR寄存器;高两位为‘01’时,数据的低6位将写入SNR寄存器。
图3 利用开关管对直流电动机进行PWM调速控制的原理图和输入输出电压波形 上图是利用开关管对直流电动机进行PWM调速控制的原理图和输入输出电压波形。图中,当开关管MOSFET的栅极输入高电平时,开关管导通,直流电动机电枢绕组两端有电压Us,t1秒后,栅极输入变为低电平,开关管截止,电动机电枢两端电压为0。T2秒后,栅极输入重新变为高电平,开关管的动作重复前面的过程。这样,对应着输入的高低电平,直流电动机电枢绕组两端的电压波形如图中所示。电动机的电枢绕组两端的电压平均值Uo为:
图中PWM输入对应ICETEK-CTR-A板上P4外扩插座第26引脚的S22信号,DSP将在此引脚上给出PWM信号开控制直流电机转速;图中的DIR输入引脚ICETEK-CTR-A板上P4外扩插座第29引脚的S14信号,DSP将在此引脚上给出高电平或低电平来控制直流电机的方向。从DSP输出的PWM信号和转向信号先经过2个与门和1个非门再与各个开关管的栅极相连。
dsp(LED灯闪烁实验)

LED灯闪烁实验报告一、实验目的1 、初步了解TMS320VC5416DSK硬件的基本结构及工作原理。
2、学习和熟悉Code Composer Studio 开发环境。
3、学习BSL(Board Support Library)二、实验仪器PC机一台TMS320VC5416DSK一套(附CCS)三、实验原理1、硬件原理图2 、软件流程图四实验步骤1、创建新工程2、在项目浏览器中激活led.cdb文件进行编辑3、修改属性4、设置选项5、调试rebuild all——Load program 后生成led.out文件把此文件装载到5416DSK上,运行显示结果五、实验现象、结果及分析1、一个灯闪烁的实验程序:void Blink0(){int delay,i;delay = 200; //亮灭时间间隔while(1) //控制灯的亮和灭{DSK5416_LED_on(0);TSK_sleep(delay);DSK5416_LED_off(0);TSK_sleep(delay);}}主函数:void main(){// Initialize the board//support libraryDSK5416_init();}』实验现象:灯1不断闪烁,通过调整程序中delay的值的大小可以改变闪烁频率。
2、程序修改1:改变灯闪烁的时间间隔程序如下:void Blink0(){int delay,i;delay = 200; //亮灭时间间隔while(1) //控制灯的亮和灭{DSK5416_LED_on(0);TSK_sleep(delay);DSK5416_LED_off(0);TSK_sleep(delay);}}实验现象:指示灯闪烁的时间间隔变大,为之前的5倍。
3)程序修改2:灯1,2,3,4同时闪烁核心程序:void Blink0(){int delay;delay = 200;while(1) //4个灯同时闪烁 { //4个灯同时亮DSK5416_LED_on(0);DSK5416_LED_on(1);DSK5416_LED_on(2);DSK5416_LED_on(3);TSK_sleep(delay);//4个灯同时灭DSK5416_LED_off(0);DSK5416_LED_off(1);DSK5416_LED_off(2);DSK5416_LED_off(3);TSK_sleep(delay);}}实验现象:4个灯同时闪烁,改变delay的值也可以改变闪烁的频率。
DSP实验报告一

DSP实验报告一引言本实验旨在通过实际操作,探索数字信号处理(DSP)的基本概念和技术。
DSP是一种通过数字计算来处理连续时间信号的技术,被广泛应用于音频处理、图像处理、通信系统等领域。
本实验将重点介绍数字信号的采样、量化和离散化过程,并通过实际编程实现。
实验过程1. 信号的采样1.1 信号的定义在DSP领域,信号是指随着时间变化的某种物理量,可以是声音、图像等。
我们首先需要定义一个连续的信号,用于采样和处理。
在本次实验中,我们选择了一个简单的正弦信号作为示例:x(t) = A \\sin(2\\pi f t)其中,A表示幅值,f表示频率,t表示时间。
1.2 采样过程为了将连续信号转换为离散信号,我们需要对信号进行采样。
采样是指在一定时间间隔内对连续信号进行测量。
我们可以通过模拟采样器来模拟采样过程。
在本实验中,我们选择了采样频率为100Hz,即每秒采样100次。
使用Python编程实现采样过程:import numpy as np# 信号参数设置A =1f =10# 采样频率设置fs =100# 采样点数设置N =100# 生成时间序列t = np.arange(N) / fs# 生成采样信号x = A * np.sin(2* np.pi * f * t)上述代码中,我们通过调整A和f的值来模拟不同的信号。
生成的信号将存储在x变量中,可以用于后续处理。
2. 信号的量化2.1 量化过程量化是指将连续信号的幅值转换为离散的数值。
在实际应用中,我们通常使用有限位数来表示信号的幅值。
常用的量化方式有线性量化和非线性量化。
在本实验中,我们选择了线性量化方式。
具体的量化过程可以通过下列Python代码实现:import math# 量化位数设置bits =8# 量化步长计算step_size =2* A / (2** bits -1)# 信号的量化x_quantized = np.round(x / step_size) * step_size上述代码中,我们通过调整bits的值来控制量化位数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include"math.h"
#define PI 3.1415926
#define WANG 16
#define RUI 1024
int FIRLOW(int *nx,float *nh,int nError,int nCoeffNumber);
float h[WANG],fU;
int xx[RUI],rr[RUI],wc[RUI];
main()
{
int i,n_Output=0;
fU=0.0005;
for ( i=0;i<W ANG;i++ ) h[i]=0;
for ( i=0;i<RUI;i++ )
{
xx[i]=256*sin(i*2*PI/34);
rr[i]=wc[i]=0;
}
for ( i=WANG+1;i<RUI;i++ )
{
n_Output=FIRLOW(xx+i,h,n_Output-xx[i-1],WANG); // break point
rr[i]=n_Output;
wc[i]=rr[i]-xx[i];
}
exit(0);
}
int FIRLOW(int *nx,float *nh,int nError,int nCoeffNumber)
{
int i,r;
float fWork;
r=0;
for ( i=0;i<nCoeffNumber;i++ )
{
fWork=nx[i]*nError*fU;
nh[i]+=fWork;
r+=(nx[i-i]*nh[i]);
}
r/=128;
return r;
}
FIR
#include <math.h>
#define RUI 25
#define RUI1 1000
#define RUI2 4500
#define SAMPLEF 10000
#define PI 3.1415926
float Wave();
float FIR();
float fHn[RUI]={ 0.0,0.0,0.001,-0.002,-0.002,0.01,-0.009,
-0.018,0.049,-0.02,0.11,0.28,0.64,0.28,
-0.11,-0.02,0.049,-0.018,-0.009,0.01,
-0.002,-0.002,0.001,0.0,0.0
};
float fXn[RUI]={ 0.0 };
float fInput,fOutput;
float fSignal1,fSignal2;
float fStepSignal1,fStepSignal2;
float f2PI;
int i;
float fIn[256],fOut[256];
int nIn,nOut;
main()
{
nIn=0; nOut=0;
f2PI=2*PI;
fSignal1=0.0;
fSignal2=PI*0.1;
fStepSignal1=2*PI/30;
fStepSignal2=2*PI*1.4;
while ( 1 )
{
fInput=Wave();
fIn[nIn]=fInput;
nIn++; nIn%=256;
fOutput=FIR();
fOut[nOut]=fOutput;
nOut++; /* break point */
if ( nOut>=256 )
{
nOut=0;
}
}
}
float Wave()
{
for ( i=RUI-1;i>0;i-- )
fXn[i]=fXn[i-1];
fXn[0]=sin((double)fSignal1)+cos((double)fSignal2)/6.0;
fSignal1+=fStepSignal1;
if ( fSignal1>=f2PI ) fSignal1-=f2PI;
fSignal2+=fStepSignal2;
if ( fSignal2>=f2PI ) fSignal2-=f2PI;
return(fXn[0]);
}
float FIR()
{
float fSum;
fSum=0;
for ( i=0;i<RUI;i++ )
{
fSum+=(fXn[i]*fHn[i]);
}
return(fSum);
}
IIR
#include <math.h>
#define wang 2
#define RUI1 1000
#define RUI2 4500
#define SAMP 10000
#define PI 3.1415926
float InputWave();
float IIR();
float fBn[wang]={ 0.0,0.7757 };
float fAn[wang]={ 0.1122,0.1122 };
float fXn[wang]={ 0.0 };
float fYn[wang]={ 0.0 };
float fInput,fOutput;
float fSignal1,fSignal2;
float fStepSignal1,fStepSignal2;
float f2PI;
int i;
float fIn[256],fOut[256];
int nIn,nOut;
main()
{
nIn=0; nOut=0;
fInput=fOutput=0;
f2PI=2*PI;
fSignal1=0.0;
fSignal2=PI*0.1;
fStepSignal1=2*PI/50;
fStepSignal2=2*PI/2.5;
while ( 1 )
{
fInput=InputWave();
fIn[nIn]=fInput;
nIn++; nIn%=256;
fOutput=IIR();
fOut[nOut]=fOutput;
nOut++; // break point
if ( nOut>=256 )
{
nOut=0;
}
}
}
float InputWave()
{
for ( i=wang-1;i>0;i-- )
{
fXn[i]=fXn[i-1];
fYn[i]=fYn[i-1];
}
fXn[0]=sin((double)fSignal1)+cos((double)fSignal2)/6.0;
fYn[0]=0.0;
fSignal1+=fStepSignal1;
if ( fSignal1>=f2PI ) fSignal1-=f2PI;
fSignal2+=fStepSignal2;
if ( fSignal2>=f2PI ) fSignal2-=f2PI;
return(fXn[0]);
}
float IIR()
{
float fSum;
fSum=0.0;
for ( i=0;i<wang;i++ )
{
fSum+=(fXn[i]*fAn[i]);
fSum+=(fYn[i]*fBn[i]);
}
return(fSum);
}。