数字信号处理实验2
数字信号处理 实验报告 实验二 应用快速傅立叶变换对信号进行频谱分析

数字信号处理实验报告实验二应用快速傅立叶变换对信号进行频谱分析2011年12月7日一、实验目的1、通过本实验,进一步加深对DFT 算法原理合基本性质的理解,熟悉FFT 算法 原理和FFT 子程序的应用。
2、掌握应用FFT 对信号进行频谱分析的方法。
3、通过本实验进一步掌握频域采样定理。
4、了解应用FFT 进行信号频谱分析过程中可能出现的问题,以便在实际中正确应用FFT 。
二、实验原理与方法1、一个连续时间信号)(t x a 的频谱可以用它的傅立叶变换表示()()j t a a X j x t e dt +∞-Ω-∞Ω=⎰2、对信号进行理想采样,得到采样序列()()a x n x nT =3、以T 为采样周期,对)(n x 进行Z 变换()()n X z x n z +∞--∞=∑4、当ωj ez =时,得到序列傅立叶变换SFT()()j j n X e x n e ωω+∞--∞=∑5、ω为数字角频率sT F ωΩ=Ω=6、已经知道:12()[()]j a m X e X j T T Tωωπ+∞-∞=-∑ ( 2-6 )7、序列的频谱是原模拟信号的周期延拓,即可以通过分析序列的频谱,得到相应连续信号的频谱。
(信号为有限带宽,采样满足Nyquist 定理)8、无线长序列可以用有限长序列来逼近,对于有限长序列可以使用离散傅立叶变换(DFT )。
可以很好的反映序列的频域特性,且易于快速算法在计算机上实现。
当序列()x n 的长度为N 时,它的离散傅里叶变换为:1()[()]()N knN n X k DFT x n x n W-===∑ 其中2jNN W eπ-=,它的反变换定义为:101()[()]()N knN k x n IDFT X k X k W N --===∑比较Z 变换式 ( 2-3 ) 和DFT 式 ( 2-7 ),令kN z W -=则1()()[()]|kNN nkN N Z W X z x n W DFT x n ---====∑ 因此有()()|kNz W X k X z -==k N W -是Z 平面单位圆上幅角为2kNπω=的点,也即是将单位圆N 等分后的第k 点。
数字信号处理实验报告 (2)

实验一信号、系统及系统响应一、实验目的1、熟悉连续信号经理想采样前后的频谱变化关系,加深对时域采样定的理解。
2、熟悉时域离散系统的时域特性。
3、利用卷积方法观察分析系统的时域特性。
4、掌握序列傅里叶变换的计算机实现方法,利用序列的傅里叶变换对连续信号、离散信号及系统响应进行频域分析。
二、实验原理采样的的过程既是连续信号离散化的过程。
采用单位冲击串进行采样,为使采样信号能不失真的还原为采样前的信号,根据奈奎斯特采样率,采样频率应该大于信号最高频率的2倍。
因为时域的采样既是对时域的离散化处理,时域离散频域会进行周期延拓,为了防止频域频谱混叠,必须满足奈奎斯特采样定律。
线性卷积的过程为:反褶,移位,相乘,相加。
设一个N1点的序列与一个N2的序列进行卷积则得到N1+N2-1点的序列。
时域卷积,对应频域的相乘。
序列的傅里叶变换即DTFT 。
具有的性质有: 线性,移位性,对偶性,等等。
三、实验内容及步骤1)分析采样序列的特性。
产生采样序列()a x n ,A 444.128=,a =,0Ω=。
a 、 取采样频率s f 1kHz =,即T 1ms =。
观察所采样()a x n 的幅频特性()j X e ω和)(t x a 的幅频特性()X j Ω在折叠频率处有无明显差别。
应当注意,实验中所得频谱是用序列的傅立叶变换公式求得的,所以在频率量度上存在关系:T ω=Ω。
b 、改变采样频率,s f 300Hz =,观察()j X eω的变化并做记录。
c 、 进一步降低采样频率,s f 200Hz =,观察频谱混叠是否明显存在,说明原因,并记录()j X e ω的幅频曲线。
上图是采用不同采样频率时所得到的序列及其对应的傅里叶变换,从图中可以看到,当采样频率比较低时,频谱会发生混叠,且频率越低,混叠现象越明显。
增大采样频率可以有效地防止混叠。
2) 离散信号、系统和系统响应分析。
a 、观察信号()b x n 和系统h ()b n 的时域和频域持性;利用线形卷积求信号()b x n 通过系统h ()b n 的响应y(n),比较所求响应y(n)和h ()b n 的时域及频域特性,注意它们之间有无差异,绘图说明,并用所学结论解释所得结果。
实验二希尔伯特变换与单边带幅度调制
实验报告实验课程:数字信号处理实验开课时间:2020—2021 学年秋季学期实验名称:希尔伯特变换与单边带幅度调制实验时间:2020年11月4日周三学院:物理与电子信息学院年级:大三班级:182 学号:姓名:1.单边带幅度调制和Hilbert变换器抑制载波的正弦幅度调制和含有载波的正弦幅度调制的共同缺点是,已调信号的频带宽度是调制信号频带宽度的两倍,占用频带资源过宽。
在传输具有双边带的已调信号时,将占用更多的信道资源。
由于实调制信号 x(t)的频谱都对称地存在于正、负频率上,因此只需在发送端发送单边带调制信号,这就是信号的单边带(Single-SideBand,SSB)幅度调制。
在单边带幅度调制中,可以保留上边带,也可以保留下边带。
信号单边带调制可以提高信道的利用率。
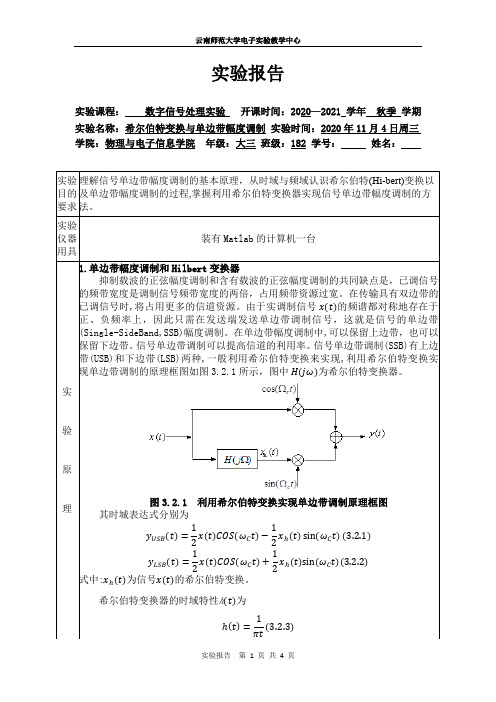
信号单边带调制(SSB)有上边带(USB)和下边带(LSB)两种,一般利用希尔伯特变换来实现,利用希尔伯特变换实现单边带调制的原理框图如图3.2.1所示,图中 H(jω)为希尔伯特变换器。
图3.2.1 利用希尔伯特变换实现单边带调制原理框图其时城表达式分别为y USB(t)=12x(t)COS(ωC t)−12xℎ(t)sin(ωC t)(3.2.1)y LSB(t)=12x(t)COS(ωC t)+12xℎ(t)sin (ωC t)(3.2.2)式中:xℎ(t)为信号x(t)的希尔伯特变换。
希尔伯特变换器的时域特性ℎ(t)为ℎ(t)=1πt(3.2.3)希尔伯特变换器的频率特性 H(jω)为H(jω)=−jsgn(ω)={−jω>0jω<0(3.2.4)由于希尔伯物变换器的幅度应响应| H(jω)|=1,相位响应方φ(ω)=−π2sgn(ω),因此,希尔伯特变换器是一个全通系统,称为90°移相器。
希尔伯特变换器的输入x(t)与输出xℎ(t)在时城具有以下关系:xℎ(t)=x(t)∗ℎ(t)=x(t)∗1πt=1π∫x(τ)t−τ+∞−∞dτ(3.2.5)xℎ(t)=xℎ(t)∗[−ℎ(t)]=xℎ(t)∗(−1πt)=−1π∫xℎ(τ)t−τ+∞−∞dτ(3.2.6)希尔伯特变换器的输人 x(t)与输出xℎ(t)在频域具有以下关系:Xℎ(jω)=X(jω)H(jω)=X(jω)[−jsgn(ω)](3.2.7)X(jω)=Xℎ(jω)H(jω)=Xℎ(jω)[−jsgn(ω)](3.2.8)若调制信号的频谱为 X(jω) ,如图3.2.1(a)所示,则单边带已调信号的频谱为Y USB=X(j(ω−ωc))+X(j(ω+ωc)) |ω|≥ωc(3.2.9)Y LSB=X(j(ω−ωc))+X(j(ω+ωc)) |ω|≤ωc(3.2.10)则上边带信号的频谐如图3.2.2(b)所示,下边带信号的频谐如图3.2.2(c)所示。
数字信号处理 实验作业:离散LSI系统的时域分析

实验2 离散LSI 系统的时域分析一、.实验目的:1、加深对离散系统的差分方程、单位脉冲响应、单位阶跃响应和卷积分析方法的理解。
2、初步了解用MA TLAB 语言进行离散时间系统时域分析的基本方法。
3、掌握求解离散时间系统的单位脉冲响应、单位阶跃响应、线性卷积以及差分方程的程序的编写方法,了解常用子函数的调用格式。
二、实验原理:1、离散LSI 系统的响应与激励由离散时间系统的时域分析方法可知,一个离散LSI 系统的响应与激励可以用如下框图表示:其输入、输出关系可用以下差分方程描述:[][]NMkk k k ay n k b x n m ==-=-∑∑2、用函数impz 和dstep 求解离散系统的单位脉冲响应和单位阶跃响应。
例2-1 已知描述某因果系统的差分方程为6y(n)+2y(n-2)=x(n)+3x(n-1)+3x(n-2)+x(n-3) 满足初始条件y(-1)=0,x(-1)=0,求系统的单位脉冲响应和单位阶跃响应。
解: 将y(n)项的系数a 0进行归一化,得到y(n)+1/3y(n-2)=1/6x(n)+1/2x(n-1)+1/2x(n-2)+1/6x(n-3)分析上式可知,这是一个3阶系统,列出其b k 和a k 系数: a 0=1, a ,1=0, a ,2=1/3, a ,3=0 b 0=1/6,b ,1=1/2, b ,2=1/2, b ,3=1/6程序清单如下: a=[1,0,1/3,0]; b=[1/6,1/2,1/2,1/6]; N=32; n=0:N-1; hn=impz(b,a,n); gn=dstep(b,a,n);subplot(1,2,1);stem(n,hn,'k');课程名称 数字信号处理 实验成绩 指导教师 ***实 验 报 告院系 班级学号 姓名 日期title('系统的单位序列响应'); ylabel('h(n)');xlabel('n');axis([0,N,1.1*min(hn),1.1*max(hn)]); subplot(1,2,2);stem(n,gn,'k'); title('系统的单位阶跃响应'); ylabel('g(n)');xlabel('n');axis([0,N,1.1*min(gn),1.1*max(gn)]); 程序运行结果如图2-1所示:102030系统的单位序列响应h (n )n1020300.20.30.40.50.60.70.80.911.11.2系统的单位阶跃响应g (n )n图2-13、用函数filtic 和filter 求解离散系统的单位序列响应和单位阶跃响应。
数字信号处理II习题解答-2004(老师版)精选全文

可编辑修改精选全文完整版1. A sinusoidal signal )2/sin()(πn n x =is applied to a second-order linear predictor as inFig.1 . Calculate the theoretical ACF(Auto-Correlation Function) of the signal and the prediction coefficients. Verify that the zeros of the FIR prediction filter are on the unit circle at the right frequency.Using the LMS algorithm with 1.0=δ, show the evolution of the coefficients from time 0=n to 10=n . How is that evolution modified if the sign algorithm is used instead.(n x (e Fig.1. Second-order prediction filter解:a)计算预测系数理论值(滤波器系数的维纳最优解),由2cos21]2)(sin 2sin [21]2)(sin 2[sin )]()([)(10πππππk k i i k n n E k n x n x E k r i xx =-=-=-=∑=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=∴2/1002/1)0()1()1()0(r r r r R x ,⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡==2/10)2()1()]()([r r n x n y E r yx11201opt x yx a H R r a -⎡⎤⎡⎤===⎢⎥⎢⎥-⎣⎦⎣⎦输出最小均方误差理论值可由下式计算:2min00[()]0.5011/2TTopt yx J E y n H r ⎡⎤⎡⎤=-=-=⎢⎥⎢⎥--⎣⎦⎣⎦其中5.0)0()]([)]([22===r n x E n y E b) FIR 滤波器零点:j z z z a z H i i i ±=⇒+=-=-=-∑22111)(,即零点在正弦信号x(n)频率的21,0πω±=对应的z 平面位置.c) 用LMS 算法,n =0~10时系数的近似值 LMS :⎩⎨⎧+-+=++++=+)1()()1()1()1()1()()1(n X n H n y n e n e n X n H n H Tδ 在线性预测误差滤波的LMS 算法中:)1()1()]1(),([)()1()](),([)()(21+⇒+-=⇒+=⇒n x n y n x n x n X n X n a n a n A n H T T⎩⎨⎧-+=+++=+)()()1()1()1()()()1(n X n A n x n e n e n X n A n A Tδ ()⎪⎩⎪⎨⎧=<==TA n n x n n x ]0,0[)0(0,0)(),2sin()(π所以, LMS 算法下的预测误差滤波器[]⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-++⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡--+=+)1()()1()()()1()1()1()()()()1()1(212121n x n x n e n a n a n a n a n x n x n a n a n x n e δ 344.00344.00729.027.00027.0081.019.00019.009.01.0001.0010)2(0)2(0)2()2(20)1(0)1(1)1()1(10)0(0)0(0212121----------============= a a x e n a a x e n a a n d) 符号算法[]⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-++⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡--+=+)1()()]1([)()()1()1()1()()()()1()1(212121n x n x sign n e sign n a n a n a n a n x n x n a n a n x n e δ )()]([0,1)(n x n x sign n x =∴±=4.004.007.03.0003.008.02.0002.009.01.0001.0010)2(0)2(0)2()2(20)1(0)1(1)1()1(10)0(0)0(0212121----------============= a a x e n a a x e n a a n2. A second-order adaptive FIR filter has the input as )2/sin()(πn n x = and)2(5.0)1()()(-+-+=n x n x n x n yas reference signal. Calculate the coefficients, starting from zero initial values, from time n=0 to n = 10 . Calculate the theoretical residual error and the time constant and compare with the experimental results.()1.0=δ 解:取1.0=δa) 计算n =0~10的系数⎪⎩⎪⎨⎧+++=++-+=+-+-+=)3()1()1()()1()2()1()()1()1()1()2(5.0)1()()(n e n X n H n H n X n H n y n e n x n x n x n y Tδ 2cos 21)(πk k r xx =⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=2/1002/1)0()1()1()0(r r r r R x ,⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡++++=2/14/1)1(5.0)0()1()2(5.0)1()0(r r r r r r r yx①⎥⎦⎤⎢⎣⎡==-12/11yx x opt r R H 2min [()]Topt yx J E y n H r =-⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--+--+-+-+-+=2/14/112/1)]2()()2()1()1()(2)2(25.0)1()([222Tn x n x n x n x n x n x n x n x n x E08/5)2()1(3)0(25.2=-++=r r r②Theoretical residual error: 0)21()(2min =+≈∞⇒∞σδN J J③Theoretical time constant :2211111120 (,)(0)0.10.5N e k x k x k x R r N τλλσλδλδσδ=≈======⨯∑是特征值 注意: 由于均方收敛的时间常数比均值收敛的时间常数小, 所以实际应用中采用较保守的理论估计值,即采用均值收敛的时间常数作为算法收敛的时间常数的理论估计值. ④利用(2)(3)作迭代:)0(0)(<=n n x ,0)0()0(21==h h[]⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡+++⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡+-+=+)()1()1()()()1()1()()1()()()1()1(212121n x n x n e n h n h n h n h n x n x n h n h n y n e δ )1(5.0)()1()1(-+++=+n x n x n x n y5.01112624.0]0,1[]4095.0,2376.0[1010]4095.0,2376.0[]06561.0,0[6561.0]1,0[]3439.0,2376.0[5.019]3429.0,2376.0[]0,02916.0[2916.0]0,1[]3439.0,2084.0[108]3439.0,2084.0[]0729.0,0[729.0]1,0[]271.0,2084.0[5.017]271.0,2084.0[]0,0324.0[324.0]0,1[]271.0,176.0[106]271.0,176.0[]081.0,0[81.0]1,0[]19.0,176.0[5.015]19.0,176.0[]0,036.0[36.0]0,1[]19.0,14.0[104]19.0,14.0[]09.0,0[9.0]1,0[]1.0,14.0[5.013]1.0,14.0[]0,04.0[4.0]0,1[]1.0,1.0[102]1.0,1.0[]1.0,0[1]1,0[]0,1.0[111.]0,01[]0,1.0[1]0,1[]0,0[000)1()1()1()1()1()()()(------------------+++++TTTTT T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T T n H n X n e n e n X n H n y n x nδb) 根据实验结果计算残差和时间常数 残差 = 0698.0)11(2=e时间常数:通过观察见,在n 为偶数时, 误差变化波动大, 因此应选择在n 为奇数时的误差值确定时间常数较合理.2916.0)9()8()9()9(=-=X H y e T 26424.0)11()10()11()11(-=-=X H y e T)0)(,0)()]([(2994.20)()11()]()9([2222)911(222=∞=∞=∞=⇒∞-=∞--⨯-e J e E e e ee e 所以在计算时可假设由于ττ所以实验结果和理论值是符合的.3. Adaptive line enhancer. Consider an adaptive third-order FIR predictor. The input signal is )()sin()(0n b n n x +=ω where )(n b is a white noise with power 2b σ.Calculate the optimal coefficients 31,,≤≤i a opt i .Give the noise power in the sequence∑=-=31,)()(i opt i i n x a n sas well as the signal power. Calculate the SNR enhancement. 解:a) 计算31,,≤≤i a opt i⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+++=20002000221cos 212cos 21cos 2121cos 212cos 21cos 2121b b b x R σωωωσωωωσ,)1()(+=n x n y 由于窄带信号为白噪声,时延参数D 选择1。
数字信号处理实验(吴镇扬)答案-2
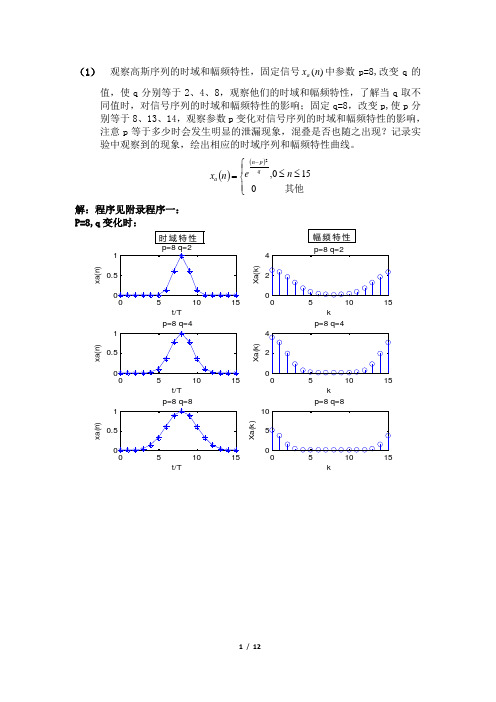
(1) 观察高斯序列的时域和幅频特性,固定信号)(n x a 中参数p=8,改变q 的值,使q 分别等于2、4、8,观察他们的时域和幅频特性,了解当q 取不同值时,对信号序列的时域和幅频特性的影响;固定q=8,改变p,使p 分别等于8、13、14,观察参数p 变化对信号序列的时域和幅频特性的影响,注意p 等于多少时会发生明显的泄漏现象,混叠是否也随之出现?记录实验中观察到的现象,绘出相应的时域序列和幅频特性曲线。
()()⎪⎩⎪⎨⎧≤≤=-其他0150,2n e n x q p n a解:程序见附录程序一:P=8,q 变化时:t/T x a (n )k X a (k )t/T x a (n )p=8 q=4k X a (k )p=8 q=4t/Tx a (n )p=8 q=8kX a (k )p=8 q=8幅频特性时域特性t/T x a (n )p=8 q=8k X a (k )p=8 q=8t/T x a (n )51015k X a (k )p=13 q=8t/Tx a (n )p=14 q=851015kX a (k )p=14 q=8时域特性幅频特性分析:由高斯序列表达式知n=p 为期对称轴; 当p 取固定值时,时域图都关于n=8对称截取长度为周期的整数倍,没有发生明显的泄漏现象;但存在混叠,当q 由2增加至8过程中,时域图形变化越来越平缓,中间包络越来越大,可能函数周期开始增加,频率降低,渐渐小于fs/2,混叠减弱;当q 值固定不变,p 变化时,时域对称中轴右移,截取的时域长度渐渐地不再是周期的整数倍,开始无法代表一个周期,泄漏现象也来越明显,因而图形越来越偏离真实值,p=14时的泄漏现象最为明显,混叠可能也随之出现;(2) 观察衰减正弦序列 的时域和幅频特性,a=0.1,f=0.0625,检查谱峰出现的位置是否正确,注意频谱的形状,绘出幅频特性曲线,改变f ,使f 分别等于0.4375和0.5625,观察这两种情况下,频谱的形状和谱峰出现的位置,有无混叠和泄漏现象?说明产生现象的原因。
(完整版)数字信号处理实验二

y = filter(num,den,x,ic);
yt = a*y1 + b*y2;
d = y - yt;
subplot(3,1,1)
stem(n,y);
ylabel('振幅');
title('加权输入: a \cdot x_{1}[n] + b \cdot x_{2}[n]的输出');
subplot(3,1,2)
%扫频信号通过2.1系统:
clf;
n = 0:100;
s1 = cos(2*pi*0.05*n);
s2 = cos(2*pi*0.47*n);
a = pi/2/100;
b = 0;
arg = a*n.*n + b*n;
x = cos(arg);
M = input('滤波器所需的长度=');
num = ones(1,M);
三、实验器材及软件
1.微型计算机1台
2. MATLAB 7.0软件
四、实验原理
1.三点平滑滤波器是一个线性时不变的有限冲激响应系统,将输出延时一个抽样周期,可得到三点平滑滤波器的因果表达式,生成的滤波器表示为
归纳上式可得
此式表示了一个因果M点平滑FIR滤波器。
2.对线性离散时间系统,若y1[n]和y2[n]分别是输入序列x1[n]和x2[n]的响应,则输入
plot(n, y);
axis([0, 100, -2, 2]);
xlabel('时间序号 n'); ylabel('振幅');
(完整word版)2015年西南交通大学数字信号处理实验2

数字信号处理MATLAB上机实验第三章3-23已知序列x(n)={1,2,3, 3,2,1}1)求出x(n)的傅里叶变换X(ejω),画出幅频特性和相频特性曲线(提示:用1024点FFT近似X(ejω));2)计算x(n)的N(N≥6)点离散傅里叶变换X(k),画出幅频特性和相频特性曲线;3) 将X(ejω)和X(k)的幅频特性和相频特性曲线分别画在同一幅图中, 验证X(k)是X(ej ω)的等间隔采样, 采样间隔为2π/N;4)计算X(k)的N点IDFT,验证DFT和IDFT的惟一性。
实验分析(1)题用1024点DFT近似x(n)的傅里叶变换.(2)题用36点DFT。
(4)题求傅里叶反变换验证IDFT的惟一性.实验代码及截图1到3问xn=[1 2 3 3 2 1];Xen=fft(xn,1024);n1=0:length(Xen)—1;amp = abs(Xen);phi = angle(Xen);Xkn=fft(xn,36);n2=0:length(Xkn)-1;amp2 = abs(Xkn);phi2 = angle(Xkn);subplot(221);plot(n1,amp)title(’Xejw幅频特性');xlabel('n');ylabel('Amp') subplot(222);plot(n1,phi)title('Xejw相频特性');xlabel(’n’);ylabel('Phi')subplot(223);stem(n2,amp2,'。
’)title('Xk幅频特性’);xlabel('n');ylabel('Amp')subplot(224);stem(n2,phi2,’.’)title(’Xk相频特性');xlabel('n’);ylabel(’Phi')截图如下第4问xn=[1 2 3 3 2 1];Xkn2=fft(xn,6);x6n=ifft(Xkn2);n2=0:length(x6n)-1;subplot(2,1,2);stem(n2,x6n,'。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
plot(n,s2);
axis([0,100,-2,2]);
xlabel('时间序号n');ylabel('振幅');
title('信号#2');
subplot(2,2,3);
plot(n,x);
axis([0,100,-2,2]);
xlabel('时间序号n');ylabel('振幅');
N=40;
num=[2.2403 2.4908 2.2403];
den=[1 -0.4 0.75];
y=impz(num,den,N);
stem(y);
ylabel('振幅');
xlabel('时间序号n');
title('冲激响应');
Q2.20
clf;
N=40;
num=[0.9 -0.45 0.35 0.002];
M=input('滤波器所需的长度=');
num=ones(1,M);
y=filter(num,1,x)/M;
subplot(2,1,1);
stem(n,x);
axis([0,100,-2,2]);
xlabel('时间序号n');
ylabel('振幅');
title('输入信号');
subplot(2,1,2);
stem(n,y);
ylabel('振幅');
title('加权输入:a \cdotx_{1}[n]+b \cdotx_{2}[n]的输出');
subplot(3,1,2)
ylabel('振幅');
title('加权输出:a \cdotx_{1}[n]+b \cdotx_{2}[n]');
subplot(3,1,3)
3.描述因果线性时不变离散时间系统,可用命令filter进行仿真。
计算冲激响应可用函数impz表示计算冲击响应钱N个样本可用y=impz(num,den,N)来表示。
五、实验步骤
按照课本上的例题书写程序。
六实验记录(数据、图表、波形、程序等)
Q2.1
clf;
n=0:100;
s1=cos(2*pi*0.05*n);
3.运用MATLAB程序得出线性时不变离散时间系统的冲激响应。
4.熟悉相应的MATLAB命令,如filter,impz。
5.实验与理论相结合,能达到对理论的更好理解。
二、实验内容
1.滑动平均系统的仿真;
2.线性和非线性系统的仿真;
3.线性时不变离散时间系统的仿真;
Q2.1对M=2,运行上述程序,生成输入x[n]=s1[n]+s2[n]的输出信号。输入x[n]的哪个分量被该离散时间系统抑制?
y2=filter(num2,den2,y1);
d=y-y2;
subplot(3,1,1)
stem(n,y);
ylabel('振幅');
title('四阶实现的输出');grid;
subplot(3,1,2)
stem(n,y2);
ylabel('振幅');
title('级联实现的输出');grid;
title('输入信号');
subplot(2,2,4);
plot(n,y);
axis([0,100,-2,2]);
xlabel('时间序号n');ylabel('振幅');
title('输出信号');
axis;
Q2.2
clf;
n=0:100;
s1=cos(2*pi*0.05*n);
s2=cos(2*pi*0.47*n);
Q2.2
若线性时不变系统由y[n]=0.5(x[n]+x[n-1])变成y[n]=0.5(x[n]-x[n-1]),对输入x[n]=s1[n]+s2[n]的影响是什么?
答:线性时不变系统由y[n]=0.5(x[n]+x[n-1])变成y[n]=0.5(x[n]-x[n-1])可以修改程序中的num=ones(1,M)为num=[1,-ones(1,M-1)]。看程序运行结果,可以看出输出信号保留了输入信号x[n]的高频部分,低频部分被抑制了。该系统将由低通滤波器变为高通滤波器。它会让s2信号的高频成分通过,而把s1信号的低频成分滤除。
num=[0.06 -0.19 0.27 -0.26 0.12];
y=filter(num,den,x);
num1=[0.3 -0.2 0.4];den1=[1 0.9 0.8];
num2=[0.2 -0.5 0.3];den2=[1 0.7 0.85];
y1=filter(num1,den1,x);%级联第一级输出
num=[2.2403 2.4908 2.2403];
den=[1 -0.4 0.75];
ic=[0 0];
y1=filter(num,den,x1,ic);
y2=filter(num,den,x2,ic);
y=filter(num,den,x,ic);
yt=a*y1+b*y2;
d=y-yt;
subplot(3,1,1)
subplot(3,1,3);
stem(n,d);
ylabel('振幅');
xlabel('时间序号n');
title('差信号');grid;
Q2.28
%p2.7
clf;
h=[3 2 1 -2 1 0 -4 0 3];%冲激
x=[1 -2 3 -4 3 2 1];
y=conv(h,x);
n=0:14;
Q2.28运行程序p2.7,对序列h[n]和y[n]求卷积,生成y[n],并用FIR
滤波器h[n]对输入x[n]滤波,求得y1[n]。y[n]和y1[n]有差别吗?为什么要使用对x[n]补零后得到的x1[n]作为输入来产生y1[n]?
计算线性时不变离散时间系统的冲激响应,运用MATLAB命令y=impz(num,den,N),得出冲激响应的前N个样本。
Q2.7
运行程序P2.3,对由加权输入得到的y[n]与在相同权系数下输出y1[n]和y2[n]相加得到的yt[n]进行比较,这两个序列是否相等?该系统是线性系统吗?
title('信号#1');
subplot(2,2,2);
plot(n,s2);
axis([0,100,-2,2]);
xlabel('时间序号n');ylabel('振幅');
title('信号#2');
subplot(2,2,3);
plot(n,x);
axis([0,100,-2,2]);
xlabel('时间序号n');ylabel('振幅');
den=[1 0.71 -0.46 -0.62];
y=impz(num,den,N);
stem(y);
ylabel('振幅');
xlabel('时间序号n');
title('冲激响应');
Q2.23
%p2.6
%级联实现
clf;
x=[1 zeros(1,40)];
n=0:40;
den=[1 1.6 2.28 1.325 0.68];
三、实验器材及软件
1.微型计算机1台
2. MATLAB 7.0软件
四、实验原理
1.若y1[n]和y2[n]分别是因果离散时间系统输入信号u1[n]和u2[n]的响应,则当
u1[n]=u2[n] n<N时,有y1[n]=y2[n] n<N
2.对于离散时不变系统,若y1[n]是x1[n]的响应,则输入x[n]=x1[n=n0]的输出响应为y[n]=y1[n-n0]。
title('输入信号');
subplot(2,2,4);
plot(n,y);
axis([0,100,-2,2]);
xlabel('时间序号n');ylabel('振幅');
title('输出信号');
axis;
Q2.4
clf;
n=0:100;
a=pi/2/100;
b=0;arg=a*n.*n+b*n;x=cos(arg);
Q2.2若线性时不变系统由y[n]=0.5(x[n]+x[n-1])变成y[n]=0.5(x[n]-x[n-1]),对输入x[n]= s1[n]+s2[n]有什么影响?
Q2.4修改程序P2.1,用一个长度为101,最低频率为0,最高频率为0.5的扫频正弦信号作为输入信号,计算其输出信号。
Q2.7运行程序P2.3,对由加权输入得到的y[n]与在相同权系数下输出y1[n]和y2[n]相加得到的yt[n]进行比较,这两个序列是否相等?该系统是线性系统吗?
s2=cos(2*pi*0.47*n);
x=s1+s2;
M=input('滤波器所需的长度=');
num=ones(1,M);
y=filter(num,1,x)/M;
subplot(2,2,1);
plot(n,s1);
axis([0,100,-2,2]);