《反馈控制电路》PPT课件
合集下载
反馈控制电路精品PPT课件

误差, • 要从卫星信号中提取载波用于解调导航电文, • 要跟随电波传播衰落造成的接收信号强度起伏变
化, • 都要用到反馈控制电路。
• 反馈控制电路为闭合环路,由比较器、控制信号 发生器、可控器件和反馈网络四部分构成,如图7-2 所示。
• 比较器将外加的参考信号r(t)与反馈信号f(t)进行比 较,输出二者的误差信号e(t),再经过控制信号发生 器产生控制信号c(t),对可控器件进行控制,使输出 信号y(t)向误差信号减小的方向变化。
• 经多次循环调整后,输出信号y(t)到达稳定值,误 差信号也不再减小,为一较小的固定值。
图7-2 反馈控制电路组成
• 可控器件的可控制量一般是增益、频率或相位。
• 对应的反馈控制系统分为自动增益控制(AGC), 自动频率控制(AFC)和自动相位控制(APC)。
• 其中自动相位控制电路通常称为锁相环路(PLL), 是应用最广的一种反馈控制电路。
• 7.1 从全球定位系统信号跟踪接收谈起 • 为了提高通信和电子系统的性能指标,在发送和
接收设备中广泛采用具有自动调节作用的控制电路。
• 在具有自动调节作用的控制电路中,反馈控制电 路是最经典,使用最多的电路结构。
• 许多运输和通信设备中安装的全球定位系统(GPS) 接收机,为了实现精确定位,就用了多种反馈控制 电路来跟踪和获取所需定位信息。
• 一般选R2C3=(5~10)/Ωmin。
• 第7章 反馈控制电路 • 本章重点 • 反馈控制电路的组成和自动调节原理; • 自动增益控制电路、自动频率控制电路、锁相
环路的电路组成; • 锁相环路的锁定状态和锁定状态下的剩余相差; • 锁相环路的应用。
• 7.1 从全球定位系统信号跟踪接收谈起 • 7.2 自动增益控制电路 • 7.3 自动频率控制电路 • 7.4 锁相环路 • 7.5 实训
化, • 都要用到反馈控制电路。
• 反馈控制电路为闭合环路,由比较器、控制信号 发生器、可控器件和反馈网络四部分构成,如图7-2 所示。
• 比较器将外加的参考信号r(t)与反馈信号f(t)进行比 较,输出二者的误差信号e(t),再经过控制信号发生 器产生控制信号c(t),对可控器件进行控制,使输出 信号y(t)向误差信号减小的方向变化。
• 经多次循环调整后,输出信号y(t)到达稳定值,误 差信号也不再减小,为一较小的固定值。
图7-2 反馈控制电路组成
• 可控器件的可控制量一般是增益、频率或相位。
• 对应的反馈控制系统分为自动增益控制(AGC), 自动频率控制(AFC)和自动相位控制(APC)。
• 其中自动相位控制电路通常称为锁相环路(PLL), 是应用最广的一种反馈控制电路。
• 7.1 从全球定位系统信号跟踪接收谈起 • 为了提高通信和电子系统的性能指标,在发送和
接收设备中广泛采用具有自动调节作用的控制电路。
• 在具有自动调节作用的控制电路中,反馈控制电 路是最经典,使用最多的电路结构。
• 许多运输和通信设备中安装的全球定位系统(GPS) 接收机,为了实现精确定位,就用了多种反馈控制 电路来跟踪和获取所需定位信息。
• 一般选R2C3=(5~10)/Ωmin。
• 第7章 反馈控制电路 • 本章重点 • 反馈控制电路的组成和自动调节原理; • 自动增益控制电路、自动频率控制电路、锁相
环路的电路组成; • 锁相环路的锁定状态和锁定状态下的剩余相差; • 锁相环路的应用。
• 7.1 从全球定位系统信号跟踪接收谈起 • 7.2 自动增益控制电路 • 7.3 自动频率控制电路 • 7.4 锁相环路 • 7.5 实训
第7章 反馈控制电路
然后进行适当放大后与恒定的参考电平UR比较, 产生一个误差信号ue。 控制信号
发生器在这里可看作是一个比例环节, 增益为k1。 若Ux减小而使Uy减小时, 环路
产生的控制信号uc将使增益Ag增大, 从而使Uy趋于增大。若Ux增大而使Uy增大时, 环路产生的控制信号uc将使增益Ag减小, 从而使Uy趋于减小。无论何种情况, 通
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
无AGC电 路
有AGC电 路
反馈控制电路
平均值
8/5/2020 11:03 AM
第7章 反馈控制电路
平均值式AGC电压产生电路的缺点:
一有外来信号,AGC就立刻起作用,接收机的增益就因
受控而减小,这对提高接收机的灵敏度是不利的,这一点对微
作用, 故称为延迟AGC。 “延迟”二字不是指时间上的延迟。
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
实现AGC的方法
(1) 改变发射极电流IE
正向AGC 反向AGC
Au0
p1 p2 Yfe g
Y fe
普通晶体管 反向AGC 正向AGC AGC电路
过环路不断地循环反馈, 都应该使输出信号振幅Uy保持基本不变或仅在较小范围 内变化。
反馈控制电路
8/5/2020 11:03 AM
第具7有章 自反动馈控增制益电控路制电路的超外差式接收机方框图如图所示:
检波器的输出信号包含有直流分量和低频交流分量,其中直流电平 的高低直接说明所接受的信号的强弱,而低频分量则反映出输入调幅波的 包络,经RC低通滤波器取出的直流分量经直流放大器放大后就是AGC电 压,去控制混频、高频放大器的增益,︱UAGC︱大,说明输入信号强, 用︱UAGC︱其控制混频、高频放大器的增益使增益减小;︱UAGC︱ 小,说明输入信号弱,用︱UAGC︱其控制混频、高频放大器的增益使 增益增大,达到自动增益控制的目的。
发生器在这里可看作是一个比例环节, 增益为k1。 若Ux减小而使Uy减小时, 环路
产生的控制信号uc将使增益Ag增大, 从而使Uy趋于增大。若Ux增大而使Uy增大时, 环路产生的控制信号uc将使增益Ag减小, 从而使Uy趋于减小。无论何种情况, 通
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
无AGC电 路
有AGC电 路
反馈控制电路
平均值
8/5/2020 11:03 AM
第7章 反馈控制电路
平均值式AGC电压产生电路的缺点:
一有外来信号,AGC就立刻起作用,接收机的增益就因
受控而减小,这对提高接收机的灵敏度是不利的,这一点对微
作用, 故称为延迟AGC。 “延迟”二字不是指时间上的延迟。
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
实现AGC的方法
(1) 改变发射极电流IE
正向AGC 反向AGC
Au0
p1 p2 Yfe g
Y fe
普通晶体管 反向AGC 正向AGC AGC电路
过环路不断地循环反馈, 都应该使输出信号振幅Uy保持基本不变或仅在较小范围 内变化。
反馈控制电路
8/5/2020 11:03 AM
第具7有章 自反动馈控增制益电控路制电路的超外差式接收机方框图如图所示:
检波器的输出信号包含有直流分量和低频交流分量,其中直流电平 的高低直接说明所接受的信号的强弱,而低频分量则反映出输入调幅波的 包络,经RC低通滤波器取出的直流分量经直流放大器放大后就是AGC电 压,去控制混频、高频放大器的增益,︱UAGC︱大,说明输入信号强, 用︱UAGC︱其控制混频、高频放大器的增益使增益减小;︱UAGC︱ 小,说明输入信号弱,用︱UAGC︱其控制混频、高频放大器的增益使 增益增大,达到自动增益控制的目的。
反馈控制电路
第7章 反馈控制电路
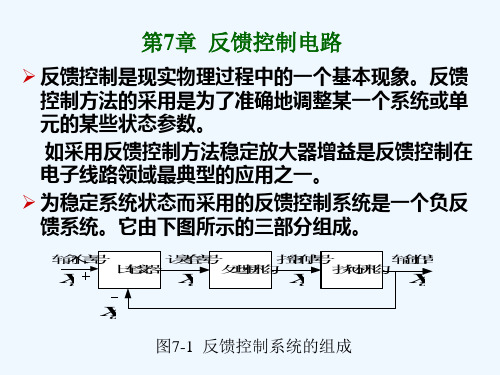
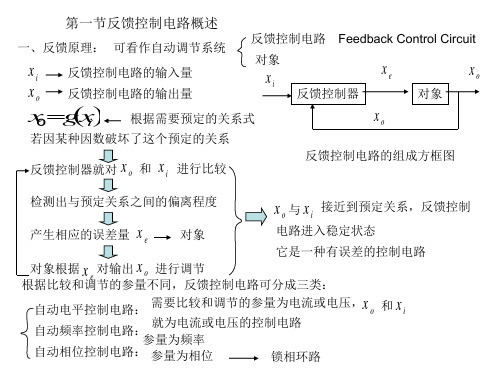
➢ 反馈控制是现实物理过程中的一个基本现象。反馈 控制方法的采用是为了准确地调整某一个系统或单 元的某些状态参数。
如采用反馈控制方法稳定放大器增益是反馈控制在 电子线路领域最典型的应用之一。
➢ 为稳定系统状态而采用的反馈控制系统是一个负反 馈系统。它由下图所示的三部分组成。
输 入 信 号
7.2.1
➢ 自动频率控制(AFC)电路由频率比较器、低通滤 波器和可控频率器件三部分组成,如图7―8所示。
➢ 频率比较器通常是鉴频器,参考频率ωr与鉴频器的 中心角频率ω0相等。
➢ 可控频率器件通常是压控振荡器(VCO),其输出振 荡角频率可写成
y y0kcuc
(7―3)
➢ 自动频率控制电路是利用误差信号的反馈作用来控 制被稳定的振荡器频率,使之稳定。误差信号是由 鉴频器产生的,它与鉴频器的两个输入信号频率差 成正比,显然达到最后稳定状态时,两个频率不可 能完全相等,必定存在剩余频差:y r 。
r r(s)
频 率 比 较 器ue 低 通 滤 波 器uc 可 控 频 率 器 件 r 输 出
Kp
U e(s)
H (s)
U c(s)
Kc
r(s) 信 号
图7―8 自动频率控制电路的组成
7.2.2 应用
自动频率微调电路(简称AFC电路)
➢ 图7―9是一个调频通信机的AFC系统的方框图。这里
是以固定中频fI作为鉴频器的中心频率,亦作为AFC
0
U im in
Uimax
Ui
图7―5 延迟AGC特性曲线
7.1.3 放大器的增益控制
➢由于高频放大器的谐振增益为:
Au0
p1 p2 Y fe g
➢ 反馈控制是现实物理过程中的一个基本现象。反馈 控制方法的采用是为了准确地调整某一个系统或单 元的某些状态参数。
如采用反馈控制方法稳定放大器增益是反馈控制在 电子线路领域最典型的应用之一。
➢ 为稳定系统状态而采用的反馈控制系统是一个负反 馈系统。它由下图所示的三部分组成。
输 入 信 号
7.2.1
➢ 自动频率控制(AFC)电路由频率比较器、低通滤 波器和可控频率器件三部分组成,如图7―8所示。
➢ 频率比较器通常是鉴频器,参考频率ωr与鉴频器的 中心角频率ω0相等。
➢ 可控频率器件通常是压控振荡器(VCO),其输出振 荡角频率可写成
y y0kcuc
(7―3)
➢ 自动频率控制电路是利用误差信号的反馈作用来控 制被稳定的振荡器频率,使之稳定。误差信号是由 鉴频器产生的,它与鉴频器的两个输入信号频率差 成正比,显然达到最后稳定状态时,两个频率不可 能完全相等,必定存在剩余频差:y r 。
r r(s)
频 率 比 较 器ue 低 通 滤 波 器uc 可 控 频 率 器 件 r 输 出
Kp
U e(s)
H (s)
U c(s)
Kc
r(s) 信 号
图7―8 自动频率控制电路的组成
7.2.2 应用
自动频率微调电路(简称AFC电路)
➢ 图7―9是一个调频通信机的AFC系统的方框图。这里
是以固定中频fI作为鉴频器的中心频率,亦作为AFC
0
U im in
Uimax
Ui
图7―5 延迟AGC特性曲线
7.1.3 放大器的增益控制
➢由于高频放大器的谐振增益为:
Au0
p1 p2 Y fe g
《反馈控制电路》课件

5. 实际搭建电路,测试性 能。
4. 仿真验证,调整参数。
3. 设计控制电路,确定反 馈环路。
01
03 02
实现方法与技巧
实现方法
模拟电路、数字电路、单片机控 制等。
模拟电路
简单、快速,适用于对精度要求不 高的场合。
数字电路
精度高、稳定性好,但实现复杂。
实现方法与技巧
• 单片机控制:集成度高、功能强大、易于编程。
THANKS
通过反馈控制,系统能够快速响应外部干 扰和变化,减小输出信号的误差,提高系 统的响应速度和准确性。
反馈控制电路是实现自动控制的关键技术 之一,广泛应用于各种工业自动化设备和 系统中。
反馈控制电路的应用领域
工业自动化
航空航天
反馈控制电路广泛应用于工业自动化 系统中,如电机控制、温度控制、压 力控制等。
《反馈控制电路》PPT课件
目录
• 反馈控制电路概述 • 反馈控制电路的组成与类型 • 反馈控制电路的设计与实现
目录
• 反馈控制电路的性能优化 • 反馈控制电路的发展趋势与展望
01
反馈控制电路概述
定义与工作原理
定义
反馈控制电路是一种通过检测输出信号并反馈到输入端,与原始输入信号进行 比较,根据比较结果调整输入信号,以实现电路性能优化的控制系统。
执行器
接收控制信号,驱动被控对象改变其状 态。
受控对象
被控制的对象或过程。
类型划分
负反馈控制电路
通过降低输出信号的幅度来减小误差, 提高控制精度。
比例控制电路
控制器输出的控制信号与输入的误差信 号成比例关系。
正反馈控制电路
通过增加输出信号的幅度来扩大误差, 可能导致系统失稳。
反馈 控制电路
自动增益控制电路是一种在输入信号幅值变化很大的情况下.通 过调节可控增益放大器的增益.使输出信号幅值基本恒定或在较小范 围内变化的一种电路.其组成框图如图6-5所示。
6.2.2自动增益控制电路的应用
图6-6所示是具有简单的AGC电路的超外差式收音机的框图。天 线收到的信号经过放大、变频再放大后.进行检波.取出音频信号。此 音频信号的大小将随着输入信号强弱的变化而变化。
第6章反馈控制电路
6.1概述 6.2自动增益控制电路 .3自动频率控制电路 6.4自动相位控制环路 6.5反馈控制电路的制作、调试和检测
6.1概述
6 .1.1自动振幅控制原理
自动振幅控制电路通常称为自动增益控制电路。它主要用于接 收机中.使整机在输入振幅变化时保持输出电压振幅不变。自动振幅 控制电路的被控量是电压振幅.在反馈控制器中必须进行振幅比较.利 用误差量去对输出振幅进行调整。图6-2所示是自动振幅控制电路组 成方框图.可控增益放大器是环路的被控对象.它的输入量ui(不是控制 环路的输入量uR)与输出量uo的关系是
第一节 儿童律动、歌表演、集体舞的创编
三、儿童集体舞 集体舞是一种有多数人表演的舞蹈,是在短小歌曲和乐曲的 伴奏下,按照一定的位置队形,做共同或不同的舞蹈动作的 舞蹈形式,舞蹈时力求动作和谐一致。集体舞的形式通常是 单圈或双圈,也有多圈或三人一组、四人一组。集体舞主要 是培养儿童在音乐伴奏下改换队形,动作整齐协调及表现统 一思想感情的能力,有利于培养儿童集体主义观念。 集体舞是幼儿园舞蹈教学的主要形式之一,具有一定的灵活 性。表演时人数可多可少,通常以班级或小组为单位进行, 或有指定的队形和规定的位置。由于舞蹈动作能够引起儿童 的学习兴趣和情绪,且全体儿童都能有机会参加表演,所以 通过表演集体舞,每个儿童的表演能力都能从中得到发挥和 表现。
6.2.2自动增益控制电路的应用
图6-6所示是具有简单的AGC电路的超外差式收音机的框图。天 线收到的信号经过放大、变频再放大后.进行检波.取出音频信号。此 音频信号的大小将随着输入信号强弱的变化而变化。
第6章反馈控制电路
6.1概述 6.2自动增益控制电路 .3自动频率控制电路 6.4自动相位控制环路 6.5反馈控制电路的制作、调试和检测
6.1概述
6 .1.1自动振幅控制原理
自动振幅控制电路通常称为自动增益控制电路。它主要用于接 收机中.使整机在输入振幅变化时保持输出电压振幅不变。自动振幅 控制电路的被控量是电压振幅.在反馈控制器中必须进行振幅比较.利 用误差量去对输出振幅进行调整。图6-2所示是自动振幅控制电路组 成方框图.可控增益放大器是环路的被控对象.它的输入量ui(不是控制 环路的输入量uR)与输出量uo的关系是
第一节 儿童律动、歌表演、集体舞的创编
三、儿童集体舞 集体舞是一种有多数人表演的舞蹈,是在短小歌曲和乐曲的 伴奏下,按照一定的位置队形,做共同或不同的舞蹈动作的 舞蹈形式,舞蹈时力求动作和谐一致。集体舞的形式通常是 单圈或双圈,也有多圈或三人一组、四人一组。集体舞主要 是培养儿童在音乐伴奏下改换队形,动作整齐协调及表现统 一思想感情的能力,有利于培养儿童集体主义观念。 集体舞是幼儿园舞蹈教学的主要形式之一,具有一定的灵活 性。表演时人数可多可少,通常以班级或小组为单位进行, 或有指定的队形和规定的位置。由于舞蹈动作能够引起儿童 的学习兴趣和情绪,且全体儿童都能有机会参加表演,所以 通过表演集体舞,每个儿童的表演能力都能从中得到发挥和 表现。
第9章反馈控制电路
假设输出信号为:
v ( t ) V cos[ t ( t )] V cos[ ( t )] o om o 0 o om o
统一参考相位:一般两信号的频率是不同的。为了便于 比较,现统一以VCO 的自由振荡相位 o 0 t 为参考 输入信号相位可改写为:
( t ) ( ) t ( t ) t ( t ) 式中:1 i 0 o 0 i 0 i
vFM i
混频器
e
中频 放大器
低通 滤波器
kv
o
压控 振荡器
§6-2 自动相位控制电路(锁相环路PLL)
一、基本组成
鉴相器的输出信号vd(t) 是输入信号vi(t)和压控振荡器输出 信号vo(t)之间相位差的函数。 vd(t)经环路滤波器滤波(也可能包括放大),滤除高频分 量后,成为压控振荡器的控制电压vp(t) 。 在vp(t)的作用下,压控振荡器输出信号的频率将发生相应变 化并反馈到鉴相器。最后进入稳定状态。
( t ) t A v ( t ) dt t ( t )
t o o 0 o 0p o 0 2
▼
时域模型:
v P (t ) v P (t )
Ao
Ao
1
2 (t )
p
2 (t )
p
4、PLL的相位数学模型与环路方程
原理方框图
1 (t )
( t ) ( t ) ( t ) e 1 2
PLL环路的非线性微分方程。
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 P F e dt dt
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 讨论: P F e dt dt
v ( t ) V cos[ t ( t )] V cos[ ( t )] o om o 0 o om o
统一参考相位:一般两信号的频率是不同的。为了便于 比较,现统一以VCO 的自由振荡相位 o 0 t 为参考 输入信号相位可改写为:
( t ) ( ) t ( t ) t ( t ) 式中:1 i 0 o 0 i 0 i
vFM i
混频器
e
中频 放大器
低通 滤波器
kv
o
压控 振荡器
§6-2 自动相位控制电路(锁相环路PLL)
一、基本组成
鉴相器的输出信号vd(t) 是输入信号vi(t)和压控振荡器输出 信号vo(t)之间相位差的函数。 vd(t)经环路滤波器滤波(也可能包括放大),滤除高频分 量后,成为压控振荡器的控制电压vp(t) 。 在vp(t)的作用下,压控振荡器输出信号的频率将发生相应变 化并反馈到鉴相器。最后进入稳定状态。
( t ) t A v ( t ) dt t ( t )
t o o 0 o 0p o 0 2
▼
时域模型:
v P (t ) v P (t )
Ao
Ao
1
2 (t )
p
2 (t )
p
4、PLL的相位数学模型与环路方程
原理方框图
1 (t )
( t ) ( t ) ( t ) e 1 2
PLL环路的非线性微分方程。
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 P F e dt dt
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 讨论: P F e dt dt
第8章反馈控制电路
式中,τ1=(R1+R2)C, τ2=R2C,R1>> R2。与RC积分滤波器不 同的是,当频率很高时,F(jΩ)|Ω→∞=R2/(R1+R2)是电阻的分压 比,这就是滤波器的比例作用。
第8章 反馈控制电路
无源比例积分滤波器 的频率特性
从相频特性上看,当频率很高时有相位超前校正的作用, 可以 改善环路的稳定性。
提取检测信号,通过检波和直流放大,控制高频(或中频)放大 器的增益。
后置AGC: AGC处于解调以后,是从解调后提取检测信 号来控制高频(或中频)放大器的增益。
基带AGC: 整个AGC电路均在解调后的基带进行处理。基 带AGC可以用数字处理的方法完成。
第8章 反馈控制电路
三 AGC的性能指标
1. KV(可控放大器的增益):
y r时,应该减小振荡频率
因为此时uc 0,所以KC为负值
第8章 反馈控制电路
2.鉴频特性
斜率为Kd
第8章 反馈控制电路
3.无偏差的AFC特性 假设低通滤波器的传 输系数为1,即误差电 压等于控制电压
y0 r时
第8章 反馈控制电路
4.有偏差的AFC特性
y0 r时
稳定频差:
1 Kd Kc
ωy=ωy0+Kcuc 其中ωy0是控制信号uc=0时的振荡角频率,称为VCO的固有振 荡角频率,Kc是压控灵敏度。
注意:环路锁定时,ωy固定不变,但是不等于ωr,还有 剩余频差Δω=|ωy-ωr|,否则无控制信息。
第8章 反馈控制电路
二 AFC电路特性分析
1.VCO的压控特性 y y0 KCuc
说明:1。由于PD的存在,锁相环只对相位进行比较。 2。锁相环是靠剩余相差进行工作(无剩余频差) 3。系统为相位负反馈环路。
第六章反馈控制电路
ve ve
稳态幅差或剩余幅差 Vo mVo mkrv
可控增益越大, A 1Ar Vo m
• 2、应用
(1).自动电平控制电路Automatic Gain Control,AGC
Vom vr ve 0
v s V im k a v tcw o c tsAve
A0 最大
Vim Vom
高频 放大器
• (2)调频负反馈解调电路
调频输入
Wi
We 混频器
中频 放大器
Wo
压控 振荡器
限幅 鉴频器
低通
解调电压输出
滤波器
调频负反馈解调电路
w iw c w mcc o ts w ow L w mc L o ts
w e (w c w L ) ( w m cw m )c L o t 仍s 为不失真的调频波
Vom min AmV ax im min
Vommax/Vommin
能够在A的变化范围, 满足环路的输出控制 在所要求范围内。
Vom ma x AmV inim max AmaxVimmax/Vimmin
A的控制倍数
A max A min
ve A Vom ve/
接收的灵敏度电压 通常取
Amin Vommax/Vommin ( V om m V a o x m m ) in v e m v a e m x in V om m iv n r V im m in v e m i0 n
o t
wo wi
.
VO
(b)
第二节、锁相环路性能分析
• 一、基本环路方程 • 1、鉴相器 锁相环路中鉴相器的输入信号:输入信号电压和VCO电压Vo
鉴相器作用:检测出两信号的相位差,并产生相应的输出电压Vd(t)
稳态幅差或剩余幅差 Vo mVo mkrv
可控增益越大, A 1Ar Vo m
• 2、应用
(1).自动电平控制电路Automatic Gain Control,AGC
Vom vr ve 0
v s V im k a v tcw o c tsAve
A0 最大
Vim Vom
高频 放大器
• (2)调频负反馈解调电路
调频输入
Wi
We 混频器
中频 放大器
Wo
压控 振荡器
限幅 鉴频器
低通
解调电压输出
滤波器
调频负反馈解调电路
w iw c w mcc o ts w ow L w mc L o ts
w e (w c w L ) ( w m cw m )c L o t 仍s 为不失真的调频波
Vom min AmV ax im min
Vommax/Vommin
能够在A的变化范围, 满足环路的输出控制 在所要求范围内。
Vom ma x AmV inim max AmaxVimmax/Vimmin
A的控制倍数
A max A min
ve A Vom ve/
接收的灵敏度电压 通常取
Amin Vommax/Vommin ( V om m V a o x m m ) in v e m v a e m x in V om m iv n r V im m in v e m i0 n
o t
wo wi
.
VO
(b)
第二节、锁相环路性能分析
• 一、基本环路方程 • 1、鉴相器 锁相环路中鉴相器的输入信号:输入信号电压和VCO电压Vo
鉴相器作用:检测出两信号的相位差,并产生相应的输出电压Vd(t)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
捕捉过程:失锁 锁定 跟踪过程:锁定 维持锁定
未加控制电压 (即uD(t) = 0) 时的VCO振荡频率
当 wi 从低频至uD(t)
高频缓慢变化时 O
wd wa
当 wi 从高频至
低频缓慢变化时
失锁 锁 定
wPwo0
捕捉带
wH
同步带
wi wc wb
锁 失锁 定
通常捕捉带小于同步带
7.3.4 集成锁相环路
7.1 自动增益控制电路 7.2 自动频率控制电路 7.3 锁相环路(PLL) 7.4 频率合成器 本章小结
引言
根据需要控制的参量不同,反馈控制电路有: 自动增益控制电路 又称自动电平控制电路,简称AGC,用
于控制输出信号大小。 自动频率控制电路 简称AFC,用于维持工作频率稳定。
自动相位控制电路 简称APC,用于锁定相位,故又称锁相 环路,简称PLL。
当AGC检波器输入 信号幅度大于UR时, AGC 电路才起控 制作用。
7.1.2 增益控制电路
1. 控制晶体管发射极电流实现增益控制 Au gm gm = IE / UT 通常将控制电压 加至基极或发射极
AGC 放大电路
当信号电压↑,使 -UC↓,则IE ↓, gm ↓, Au ↓
2. 差分放大器增益控制电路
7.2.1 工作原理
当 fr = fo时, uD(t) = 0 ,fo不变
当 fr ≠ fo时,uD(t) 正比于 ( fo – fr ),得uc(t)控制 fo向 fr 接近
经若干调节周期,环路最后锁定在 fo = fr + f 这个 f 称为剩余频率误差,简称剩余频差。 有剩余频差是AFC 的缺点。 鉴频特性和压控振荡器压控特性的灵敏度越大,则 f 越小。
环路锁定时的相位误差e(t) 是一个固定值,用e∝ 表示,称为
剩余相位误差或稳态相位误差。正是这个稳态相位误差,才使 鉴相器输出一个直流电压,控制压控振荡器的振荡角频率,使 之等于输入信号角频率。
环路锁定时,Δωi 增大,e∝ 也相应增大。说明Δωi 越大,将
VCO 振荡角频率调整到等于输入信号角频率所需的控制电压越
PDⅡ采用数字式鉴频鉴相器,输入信号只在上。升沿起作用, 故该PD能处理非常窄的脉冲。便于快速锁定。
通常输入信噪比以及固有频差较小时采用PD, 输入信噪比较高或固有频差较大时,采用1 、R2、C 确定VCO 频率范围。R1 控制最高频率,R2 控制 最低频率。 R2=∞ 时,最低频率为零。无输入信号时, PDⅡ 将VCO 调整到最低频率
压控振荡器(VCO):在uC(t) 控制下输出相应频率 fo。
两个正弦信号的频率和相位之间的关系
若能保证两个信号之间的相位差恒定,则 这两个信号的频率必相等。
若wi ≠wo,则ui(t) 和uo(t) 之间产生相位变化 ,鉴相器输出误
差电压uD(t) ,它与瞬时误差相位成正比,经过环路滤波,滤 除了高频分量和噪声而取出缓慢变化的电压uc(t) ,控制VCO
大,因而产生这个控制电压的e∝ 也就越大。但Δωi 过大,环路 将无法锁定,此时环路将不存在使它锁定的e∝ 。
7.3.3 锁相环路捕捉与跟踪
由失锁进入锁定的过程称为捕捉过程。能够由失锁进入锁定 的最大输入固有频差称为环路捕捉带,用Δωp表示。
若环路初始状态是锁定的,因某种原因使频率发生变化,环 路通过自身的调节来维持锁定的过程称为跟踪过程。能够保 持跟踪的输入信号频率与压控振荡器频率最大频差范围称为 同步带(又称跟踪带),用ΔωH表示。
图(b)电路的传递函数为
AF
(s)
UC UD
(s) (s)
R2
1 sC
R1
R2
1 sC
1 sτ 2 1 s(τ1 τ 2 )
τ1 R1C τ 2 R2C
环路滤波器的电路模型
将AF(s) 中的复频率s 用
微分算子p 替换,可得 uc (t ) AF ( p)uD (t )
四、PLL的相位模型和基本方程
按电路构成分类 模拟PLL:模拟PD LF VCO 数字PLL:全数字:数字PD 数字LF 数字VCO
模拟+ 数字:数字PD 模拟 LF 模拟VCO
按用途分类 通用 PLL 专用 PLL
一、通用型单片集成锁相环路L562
内部结构
工作频率达30MHz
引脚
L562内部VCO 采用射极耦合多谐振荡器电路
设鉴相器具有正弦鉴相特性,则
uD (t) Ad sine (t)
二、压控振荡器(VCO)
在uc = 0 附近,控制特性近似线性:
wo (t) wo0 Aouc (t)
Ao是控制灵敏度(增益系数),
单位 rad /(s V )
t
t
(t ) 0 w o (t )dt w o0 Ao 0 uc (t )dt
7.3.5 锁相环路的应用
一、锁相环路的基本特性
(1) 环路锁定时,鉴相器的两个输入信号频率相等, 没有频率误差。
(2) 频率跟踪特性:环路锁定时,VCO 输出频率能 在一定范围内跟踪输入信号频率的变化。
(3) 窄带滤波特性:可以实现高频窄带带通滤波。
二、锁相鉴频电路
工作原理:输入为调频信号,当环路锁定后,压控振荡器的振 荡频率就精确地跟踪输入调频信号的瞬时频率而变化,产生具 有相同调制规律的调频信号。只要压控振荡器的频率控制特性 是线性的,压控振荡器的控制电压uc(t) 就是输入调频信号的原 调制信号。 要求:捕捉带 > 输入调频信号的最大频偏
的角频率 wo ,去接近wi 。 最终使 wi = wo ,相位误差为常数,环路锁定,这时的相位误
差称为剩余相位误差或稳态相位误差。
7.3.2 锁相环路的数学
模型
一、鉴相器(PD)
设压控振荡器的输出电压为 uo (t ) Uom c oswo0t o (t )
ωo0 是压控振荡器未加控制电压时固有振荡角频率;
7.3 锁相环路(PLL) 主要要求:
掌握PLL的作用、基本组成和工作原理 了解PLL的数学模型 了解PLL的捕捉与跟踪 了解集成PLL及其应用
7.3.1 锁相环路基本 原理
鉴相器(PD):用以比较ui、 uo相位, 输出反映相位误差
的电压uD(t)。 环路滤波器(LF):用以滤除误差信号中的高频分量和噪 声,提高系统稳定性。
p i (t)
d i (t)
dt
wi (t) wi
wo0
称输入固有角频差,表示输入信号角频率ωi 偏离ωo0的数值。
we (t) wo (t) wi (t)
可见:锁相环路闭合后的任何时刻,瞬时角频差Δωe(t)与控制 角频差Δωo(t)之和恒等于输入固有角频差Δωi(t)
若输入固有角频差Δωi(t) =Δωi为常数,即ui(t) 为恒定频率的输入 信号,则在环路进入锁定过程中,瞬时角频差Δωe(t)不断减小, 而控制角频差Δωo(t)不断增大,两者之和恒等于Δωi,直到瞬时 角频差减小到零,控制角频差增大到Δωi ,压控振荡器的振荡角 频率ωo等于输入信号角频率ωi 时,环路进入锁定。
以ωo0为参考的瞬时相位o(t) 为
VCO的控制特性
o (t ) Ao
t
0 uc (t )dt
可见压控振荡器是一个理想的积分器
VCO的相位模型
将积分符号用微分算子p=d/dt 的 倒数表示,则得
o (t)
Ao p
uc (t)
三、环路滤波器(LF)
RC 积分滤波器 RC 比例积分滤波器
有源比例积分滤波器
p e (t )
de (t)
dt
we (t)
wi
wo
称瞬时角频差,表示VCO 角频率ωo 偏离输入角频率ωi 的数值
Ad Ao AF ( p) s in e (t ) wo (t ) wo wo0
称控制角频差,表示压控振荡器在 uc(t)=AdAF(p)sin[e(t)] 的作
用下,产生振荡角频率ωo 偏离ωo0的数值。
环路带宽大于输入调频信号中调制信号的频谱宽度。
三、调幅波的同步检波
有p/2固定相移
工作原理:输入为调幅信号或带有导频的单边带信号,LF的 通频带很窄,使锁相环路锁定在调幅信号的载频上,这样压 控振荡器就可以提供能跟踪调幅信号载波频率变化的同步信 号。再利用同步检波器可以得到解调电压输出。
注意:压控振荡器输出电压与输入已调信号的载波电压间有 p/2的固定相移,因此须经过p/2的移相器加到同步检波器上, 这样才能使VCO输出电压与已调信号的载波电压同相。
7.1 自动增益控制电路
主要要求:
了解自动增益控制电路的组成、工作原理和应用。 了解常用增益控制电路。
7.1.1 自动增益控制电路 的作用
一、AGC的组成、工作原理与作用
作用:通过闭合环路的反馈控制作用,可使输入信号ui 幅度增 大或减小时,输出信号幅度保持恒定或仅在很小的范围内变化
二、AGC的应用
锁相环路相位模型
环路的基本方程式为
e (t)
i (t)
o (t)
i (t)
Ad AF ( p)
Ao p
sine (t)
两边对t 求导数并移项,得
pe (t) Ad Ao AF ( p) sine (t) pi (t)
pe (t) Ad Ao AF ( p) sine (t) pi (t)
设起始时V1导通、 V2截止,则VCC通 过V3 、 V1向C充电,充电电流为I02 。 由于V1导通时UE1≡ VCC –UBE(on) ,故 C充电使UE2下降,当其下降到( VCC – UD–UBE(on) )时, V2导通,使UC2由 VCC下降为 ( VCC – UD),致使V1截 止, VCC通过V4、 V2向C反向充电, 充电电流为I01 ,使UE1下降,直到引 起V1重新导通、 V2又截止。如此循环
未加控制电压 (即uD(t) = 0) 时的VCO振荡频率
当 wi 从低频至uD(t)
高频缓慢变化时 O
wd wa
当 wi 从高频至
低频缓慢变化时
失锁 锁 定
wPwo0
捕捉带
wH
同步带
wi wc wb
锁 失锁 定
通常捕捉带小于同步带
7.3.4 集成锁相环路
7.1 自动增益控制电路 7.2 自动频率控制电路 7.3 锁相环路(PLL) 7.4 频率合成器 本章小结
引言
根据需要控制的参量不同,反馈控制电路有: 自动增益控制电路 又称自动电平控制电路,简称AGC,用
于控制输出信号大小。 自动频率控制电路 简称AFC,用于维持工作频率稳定。
自动相位控制电路 简称APC,用于锁定相位,故又称锁相 环路,简称PLL。
当AGC检波器输入 信号幅度大于UR时, AGC 电路才起控 制作用。
7.1.2 增益控制电路
1. 控制晶体管发射极电流实现增益控制 Au gm gm = IE / UT 通常将控制电压 加至基极或发射极
AGC 放大电路
当信号电压↑,使 -UC↓,则IE ↓, gm ↓, Au ↓
2. 差分放大器增益控制电路
7.2.1 工作原理
当 fr = fo时, uD(t) = 0 ,fo不变
当 fr ≠ fo时,uD(t) 正比于 ( fo – fr ),得uc(t)控制 fo向 fr 接近
经若干调节周期,环路最后锁定在 fo = fr + f 这个 f 称为剩余频率误差,简称剩余频差。 有剩余频差是AFC 的缺点。 鉴频特性和压控振荡器压控特性的灵敏度越大,则 f 越小。
环路锁定时的相位误差e(t) 是一个固定值,用e∝ 表示,称为
剩余相位误差或稳态相位误差。正是这个稳态相位误差,才使 鉴相器输出一个直流电压,控制压控振荡器的振荡角频率,使 之等于输入信号角频率。
环路锁定时,Δωi 增大,e∝ 也相应增大。说明Δωi 越大,将
VCO 振荡角频率调整到等于输入信号角频率所需的控制电压越
PDⅡ采用数字式鉴频鉴相器,输入信号只在上。升沿起作用, 故该PD能处理非常窄的脉冲。便于快速锁定。
通常输入信噪比以及固有频差较小时采用PD, 输入信噪比较高或固有频差较大时,采用1 、R2、C 确定VCO 频率范围。R1 控制最高频率,R2 控制 最低频率。 R2=∞ 时,最低频率为零。无输入信号时, PDⅡ 将VCO 调整到最低频率
压控振荡器(VCO):在uC(t) 控制下输出相应频率 fo。
两个正弦信号的频率和相位之间的关系
若能保证两个信号之间的相位差恒定,则 这两个信号的频率必相等。
若wi ≠wo,则ui(t) 和uo(t) 之间产生相位变化 ,鉴相器输出误
差电压uD(t) ,它与瞬时误差相位成正比,经过环路滤波,滤 除了高频分量和噪声而取出缓慢变化的电压uc(t) ,控制VCO
大,因而产生这个控制电压的e∝ 也就越大。但Δωi 过大,环路 将无法锁定,此时环路将不存在使它锁定的e∝ 。
7.3.3 锁相环路捕捉与跟踪
由失锁进入锁定的过程称为捕捉过程。能够由失锁进入锁定 的最大输入固有频差称为环路捕捉带,用Δωp表示。
若环路初始状态是锁定的,因某种原因使频率发生变化,环 路通过自身的调节来维持锁定的过程称为跟踪过程。能够保 持跟踪的输入信号频率与压控振荡器频率最大频差范围称为 同步带(又称跟踪带),用ΔωH表示。
图(b)电路的传递函数为
AF
(s)
UC UD
(s) (s)
R2
1 sC
R1
R2
1 sC
1 sτ 2 1 s(τ1 τ 2 )
τ1 R1C τ 2 R2C
环路滤波器的电路模型
将AF(s) 中的复频率s 用
微分算子p 替换,可得 uc (t ) AF ( p)uD (t )
四、PLL的相位模型和基本方程
按电路构成分类 模拟PLL:模拟PD LF VCO 数字PLL:全数字:数字PD 数字LF 数字VCO
模拟+ 数字:数字PD 模拟 LF 模拟VCO
按用途分类 通用 PLL 专用 PLL
一、通用型单片集成锁相环路L562
内部结构
工作频率达30MHz
引脚
L562内部VCO 采用射极耦合多谐振荡器电路
设鉴相器具有正弦鉴相特性,则
uD (t) Ad sine (t)
二、压控振荡器(VCO)
在uc = 0 附近,控制特性近似线性:
wo (t) wo0 Aouc (t)
Ao是控制灵敏度(增益系数),
单位 rad /(s V )
t
t
(t ) 0 w o (t )dt w o0 Ao 0 uc (t )dt
7.3.5 锁相环路的应用
一、锁相环路的基本特性
(1) 环路锁定时,鉴相器的两个输入信号频率相等, 没有频率误差。
(2) 频率跟踪特性:环路锁定时,VCO 输出频率能 在一定范围内跟踪输入信号频率的变化。
(3) 窄带滤波特性:可以实现高频窄带带通滤波。
二、锁相鉴频电路
工作原理:输入为调频信号,当环路锁定后,压控振荡器的振 荡频率就精确地跟踪输入调频信号的瞬时频率而变化,产生具 有相同调制规律的调频信号。只要压控振荡器的频率控制特性 是线性的,压控振荡器的控制电压uc(t) 就是输入调频信号的原 调制信号。 要求:捕捉带 > 输入调频信号的最大频偏
的角频率 wo ,去接近wi 。 最终使 wi = wo ,相位误差为常数,环路锁定,这时的相位误
差称为剩余相位误差或稳态相位误差。
7.3.2 锁相环路的数学
模型
一、鉴相器(PD)
设压控振荡器的输出电压为 uo (t ) Uom c oswo0t o (t )
ωo0 是压控振荡器未加控制电压时固有振荡角频率;
7.3 锁相环路(PLL) 主要要求:
掌握PLL的作用、基本组成和工作原理 了解PLL的数学模型 了解PLL的捕捉与跟踪 了解集成PLL及其应用
7.3.1 锁相环路基本 原理
鉴相器(PD):用以比较ui、 uo相位, 输出反映相位误差
的电压uD(t)。 环路滤波器(LF):用以滤除误差信号中的高频分量和噪 声,提高系统稳定性。
p i (t)
d i (t)
dt
wi (t) wi
wo0
称输入固有角频差,表示输入信号角频率ωi 偏离ωo0的数值。
we (t) wo (t) wi (t)
可见:锁相环路闭合后的任何时刻,瞬时角频差Δωe(t)与控制 角频差Δωo(t)之和恒等于输入固有角频差Δωi(t)
若输入固有角频差Δωi(t) =Δωi为常数,即ui(t) 为恒定频率的输入 信号,则在环路进入锁定过程中,瞬时角频差Δωe(t)不断减小, 而控制角频差Δωo(t)不断增大,两者之和恒等于Δωi,直到瞬时 角频差减小到零,控制角频差增大到Δωi ,压控振荡器的振荡角 频率ωo等于输入信号角频率ωi 时,环路进入锁定。
以ωo0为参考的瞬时相位o(t) 为
VCO的控制特性
o (t ) Ao
t
0 uc (t )dt
可见压控振荡器是一个理想的积分器
VCO的相位模型
将积分符号用微分算子p=d/dt 的 倒数表示,则得
o (t)
Ao p
uc (t)
三、环路滤波器(LF)
RC 积分滤波器 RC 比例积分滤波器
有源比例积分滤波器
p e (t )
de (t)
dt
we (t)
wi
wo
称瞬时角频差,表示VCO 角频率ωo 偏离输入角频率ωi 的数值
Ad Ao AF ( p) s in e (t ) wo (t ) wo wo0
称控制角频差,表示压控振荡器在 uc(t)=AdAF(p)sin[e(t)] 的作
用下,产生振荡角频率ωo 偏离ωo0的数值。
环路带宽大于输入调频信号中调制信号的频谱宽度。
三、调幅波的同步检波
有p/2固定相移
工作原理:输入为调幅信号或带有导频的单边带信号,LF的 通频带很窄,使锁相环路锁定在调幅信号的载频上,这样压 控振荡器就可以提供能跟踪调幅信号载波频率变化的同步信 号。再利用同步检波器可以得到解调电压输出。
注意:压控振荡器输出电压与输入已调信号的载波电压间有 p/2的固定相移,因此须经过p/2的移相器加到同步检波器上, 这样才能使VCO输出电压与已调信号的载波电压同相。
7.1 自动增益控制电路
主要要求:
了解自动增益控制电路的组成、工作原理和应用。 了解常用增益控制电路。
7.1.1 自动增益控制电路 的作用
一、AGC的组成、工作原理与作用
作用:通过闭合环路的反馈控制作用,可使输入信号ui 幅度增 大或减小时,输出信号幅度保持恒定或仅在很小的范围内变化
二、AGC的应用
锁相环路相位模型
环路的基本方程式为
e (t)
i (t)
o (t)
i (t)
Ad AF ( p)
Ao p
sine (t)
两边对t 求导数并移项,得
pe (t) Ad Ao AF ( p) sine (t) pi (t)
pe (t) Ad Ao AF ( p) sine (t) pi (t)
设起始时V1导通、 V2截止,则VCC通 过V3 、 V1向C充电,充电电流为I02 。 由于V1导通时UE1≡ VCC –UBE(on) ,故 C充电使UE2下降,当其下降到( VCC – UD–UBE(on) )时, V2导通,使UC2由 VCC下降为 ( VCC – UD),致使V1截 止, VCC通过V4、 V2向C反向充电, 充电电流为I01 ,使UE1下降,直到引 起V1重新导通、 V2又截止。如此循环