富士伺服驱动器的常用故障代码及其检查与维护
富士伺服驱动器报警代码
富士伺服驱动器报警代码
二、报警的处理方法:
三、关于报警复位
存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
报警的复位按以下任意方式进行:
●将报警复位(RST:指令序列输入信号)置于ON一次后再置于OFF。
●触摸屏上的试运行模式[FnOS]:实行报警复位。
●在报警显示画面上同时按住[Λ]键和[V]1秒钟以上。
●使用PC加载器的“监控”指令上的报警复位。
●报警复位后,返回到参数“PA2_77:初始显示(触摸屏)”上所设定的显示内容。
富士伺服器故障代码与维修
、检查7段LED显示器以0.5秒的间隔闪烁。
)2、警报检出时的动作(2 )以最大转矩减速,停止后自由运转(图2)(图6)、维护1、过电流故障 0C 1、0C 2【显示】(图4)【检出内容】 主回路晶体的输出电流超过规定值。
【要因与处置】伺服马达的动力配线有可能漏电或短路。
通常,对地间有数 MQ 以上,线圈之间的电阻值均衡。
2、过速度故障OS 【显示】【检出内容】(图3)(图5)On 16 :直流中间电压(最大值) On 17 :直流中间电压(最小值)伺服马达的回转速度超过最高速度的1.1倍。
【要因与处置】【显示】【检出内容】伺服驱动器内部的直流中间电压比上限值大。
可以在按键面板的监视模式确认内部的中间电压。
约在420V 时检出电压。
回生㈣M S 因動屠與佃《^馬逹之柑帕的連捋照;*如谨時間】【孝數瞪披}證逛一點* S 字時尚常執'養執43験}盘宅人 暹"動作時的連度庫祥(兔藪11臨)部進更 粘-(图7)3、过电压故障HuHu(图9)au 整因 9M啦源雄麗太咅(童舞剛供:fci 時確謔邀藏邀磁- 沒L 也按外邹冋工世01 龍援外部回牛電-a 認补都刚生唱昭的配w (噺縛}・ 冋生品K 抜爛 更煥何胭霸勳阳;(图 10)(图8)【要因与处置】4、编码器异常故障 Et【显示】【检出内容】 伺服马达内部的编码器可能已损坏。
【要因与处置】编码器内部的CPU 是以自我诊断的结果来检出警报的。
这时,伺服驱动器马达之间正在进行通信。
5、控制电流异常故障 Ct【显示】【检出内容】 伺服驱动器内部的控制电源发生异常,有损坏的可能性。
【要因与处置】14)6、记忆体异常故障 dE【显示】常要因世換何职罵蓬・編腐蛊畑動降低勤卅瞒的理庭®酋(譽數11戴;看看-(图控《!■««異常W[姗更挽伺呱Bi 動器-(图(图 11)(图 13)【检出内容】保存在伺服驱动器 EEPROM 内部的参数内容已损坏。
富士伺服驱动器报警代码
富士伺服驱动器报警代码一、报警显示的含义二、报警的处理方法:延长PA1_37:加速时间增大PA1_52:一次延迟S形时间常数提高PA1_15:自整定增益1确认电源电压在规格范围内若有功率改进用电容器则插入电抗器在PC加载器上读取参数,再设定以红字显示的参数实行参数的初始化采取上述对策后仍未恢复,则更换伺服放大器确认电源在规格范围值内若有功率改进用电容器则插入电抗器延长减速时间降低伺服电机的转速延长停止时间降低再生频度电线的确认(目测、导通校验)与修复确认并修复编码器电缆的断线状态插入铁氧体磁心确认并修复动力线(U、V、W)的配线确认制动器是否在运行根据负载率重新检查伺服电机功率若转速低则装入减速机升降机械停止时以制动器保持确认是否会发生瞬间断电的电源环境,改善电源环境电源功率及变压器功率的确认及其改善确认电源电压在规格值内若有功率改进用电容器则插入电抗器延长减速时间降低伺服电机的转速延长单循环时间,降低运行频度延长减速时间降低伺服电机的转速延长单循环时间,降低运行频度提高外部再生电阻器的功率安装配重将周围温度保持在40℃以下若伺服放大器附近存在发热体则拉开距离将周围温度保持在40℃以下若伺服放大器附近存在发热体则拉开距离将伺服电机的周围温度保持在40℃以下存在妨碍放热的障碍物时,将其排出确认并修复编码器电缆是否断线更换电池因电池电压降低触摸屏上出现警告显示以位置预置能解除dL3,但残留ET报警若不能解除ET报警则更换伺服电机确认伺服电机旋转量以PC加载器等确认目前位置三、关于报警复位存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
rH2外部再生电阻过热dL2ABS数据丢失2*oF偏差超出dL3ABS数据丢失3*AH放大器过热AF多旋转溢出EH编码器过热' E初始化错误报警的复位按以下任意方式进行:将报警复位(RST:指令序列输入信号)置于ON一次后再置于OFF。
富士伺服驱动器报警代码
富士伺服驱动器报警代码
二、报警的处理方法:
存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
报警的复位按以下任意方式进行:
●将报警复位(RST:指令序列输入信号)置于ON一次后再置于OFF。
●触摸屏上的试运行模式[FnOS]:实行报警复位。
●在报警显示画面上同时按住[Λ]键和[V]1秒钟以上。
●使用PC加载器的“监控”指令上的报警复位。
●报警复位后,返回到参数“PA2_77:初始显示(触摸屏)”上所设定的显示内容。
富士伺服驱动器报警代码
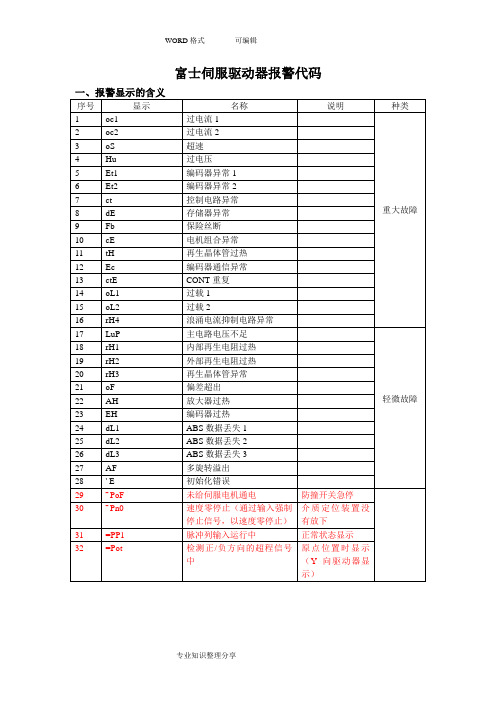
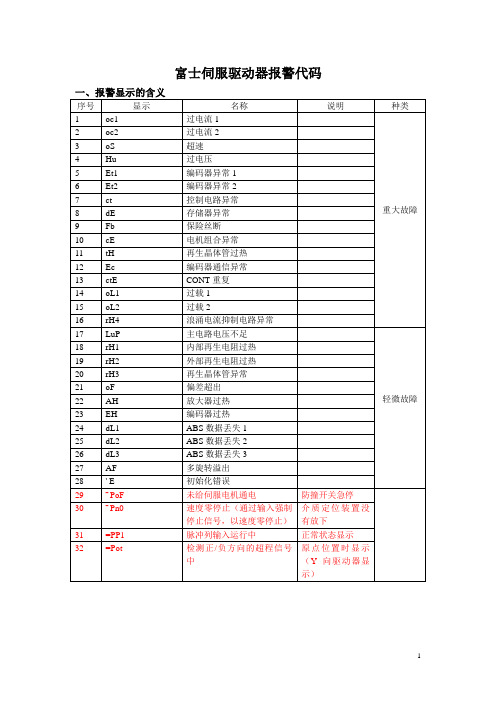
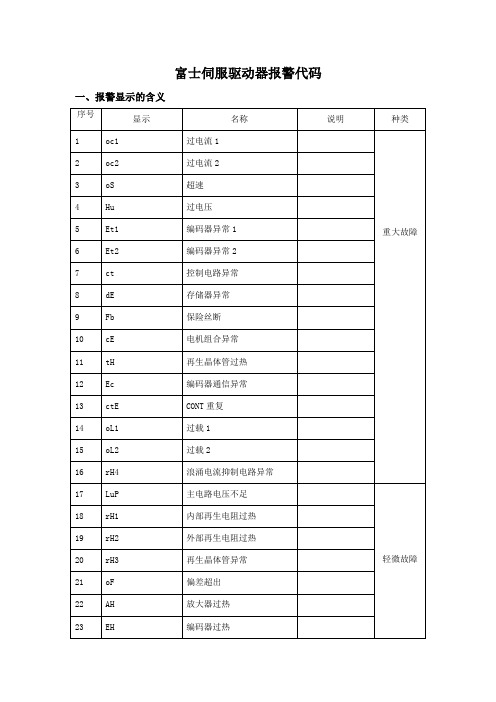
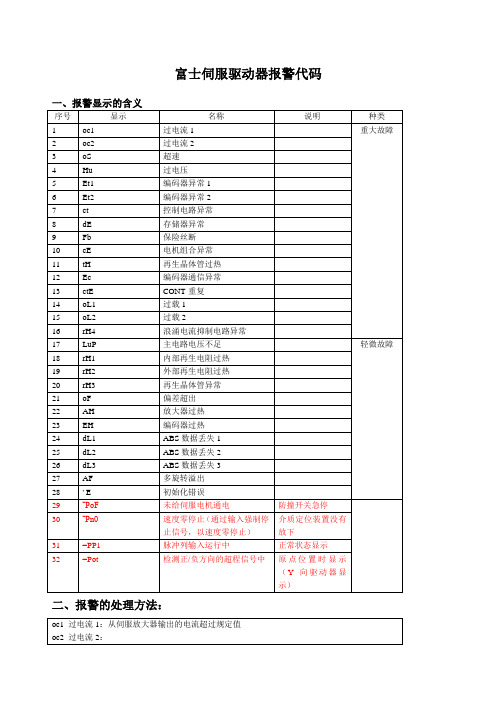
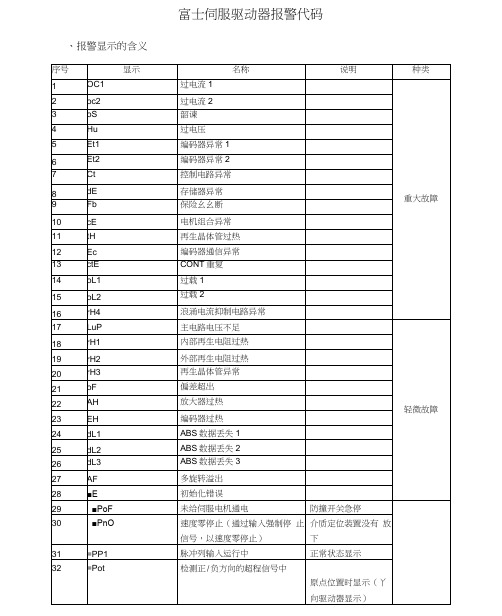
富士伺服驱动器报警代码一、报警显示的含义序号 显示名称说明种类 1 oc1 过电流1 重大故障2 oc2 过电流23 oS 超速4 Hu 过电压5 Et1 编码器异常16 Et2 编码器异常27 ct 控制电路异常8 dE 存储器异常9 Fb 保险丝断 10 cE 电机组合异常 11 tH 再生晶体管过热 12 Ec 编码器通信异常 13 ctE CONT 重复 14 oL1 过载1 15 oL2 过载216 rH4 浪涌电流抑制电路异常 17 LuP 主电路电压不足轻微故障18 rH1 内部再生电阻过热 19 rH2 外部再生电阻过热 20 rH3 再生晶体管异常 21 oF 偏差超出 22 AH 放大器过热 23 EH 编码器过热 24 dL1 ABS 数据丢失1 25 dL2 ABS 数据丢失2 26 dL3 ABS 数据丢失3 27 AF 多旋转溢出 28 ' E 初始化错误29 ¯PoF 未给伺服电机通电防撞开关急停30 ¯Pn0 速度零停止(通过输入强制停止信号,以速度零停止) 介质定位装置没有放下 31 =PP1 脉冲列输入运行中 正常状态显示 32=Pot检测正/负方向的超程信号中原点位置时显示(Y 向驱动器显示)二、报警的处理方法:oc1 过电流1:从伺服放大器输出的电流超过规定值oc2 过电流2:原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线确认电线(目测、导通检查),并更换伺服电机的输出配线短路伺服电机绝缘不良绝缘电阻测定(对地间在数MΩ以上)伺服电机的故障线间电阻测定(各线间为数Ω)再生电阻器的电阻值不合适更换为可适用范围的再生电阻器因编码器的异常引起的电流不平稳更换伺服电机未接地线连接地线oS 超速:伺服电机的转速超过最高速度的1.1倍原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线伺服电机的转速超速●延长PA1_37:加速时间●增大PA1_52:一次延迟S形时间常数●提高PA1_15:自整定增益1Hu 过电压:伺服放大器内部直流电压高于上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格范围内●若有功率改进用电容器则插入电抗器外部再生电阻器的未连接或误配线连接外部再生电阻器再生晶体管破损更换伺服放大器Et1 编码器异常1:编码器的1转位置检测异常Et2 编码器异常2 :编码器存储数据的读取异常原因措施来自编码器的数据异常使用屏蔽线以免爱噪音影响编码器出现故障更换伺服电机ct 控制电路异常:伺服放大器内部的控制电源电压存在异常,内部电路有出现的故障的可能性原因措施伺服放大器出现故障即使再次接通电源也未恢复时,更换伺服放大器dE 存储器异常:伺服放大器内保存参数数据损坏原因措施存储器的内容已破损●在PC加载器上读取参数,再设定以红字显示的参数●实行参数的初始化●采取上述对策后仍未恢复,则更换伺服放大器参数的改写次数超过10万次更换伺服放大器Fb 保险丝断:伺服放大器主电路的保险丝断线原因措施保险丝断线更换伺服放大器cE 电机组合异常:连接的伺服电机与伺服放大器的功率、型号不同原因措施伺服电机与伺服放大器的功率、型号不同确认伺服电机及伺服放大器功率、型号tH 再生晶体管过热:内置于伺服放大器的再生处理用晶体管过热原因措施电源电压过高(刚接通电源后)●确认电源在规格范围值内●若有功率改进用电容器则插入电抗器再生电力过大●延长减速时间●降低伺服电机的转速●延长停止时间降低再生频度Ec 编码器通信异常:未能与伺服电机内部的编码器通信原因措施编码器的串行通信异常●电线的确认(目测、导通校验)与修复●确认并修复编码器电缆的断线状态配线断线或接触不良●插入铁氧体磁心ctE CONT重复:伺服放大器的指令序列输入端子的分配重复原因措施多个端子分配同一输入信号CONT信号设定时不要设定同一序号oL1 过载1:轴锁定等在短时间检测出的报警oL2 过载2:转矩的有效值超过伺服电机的容许值原因措施伺服电机不能机械性旋转●确认并修复动力线(U、V、W)的配线●确认制动器是否在运行较之伺服电机功率机械系统较重●根据负载率重新检查伺服电机功率●若转速低则装入减速机●升降机械停止时以制动器保持加减速频度及运行频度高延长单循环时间,降低运行频度伺服放大器破损更换伺服放大器LuP 主电路电压不足:供给伺服放大器的主电源低于规格范围内的最低电压原因措施因瞬间断电等引起的电源电压下降●确认是否会发生瞬间断电的电源环境,改善电源环境●电源功率及变压器功率的确认及其改善rH1 内部再生电阻过热:内置于伺服放大器的再生电阻器的电力消耗量超过上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格值内●若有功率改进用电容器则插入电抗器根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度未连接再生电阻正确连接,将PA2_65置于0或2rH2 外部再生电阻过热:外部再生电阻过热信号(b接点信号)运行(释放)原因措施电源电压过高(刚接通电源后)确认电源电压在规格值内根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度●提高外部再生电阻器的功率●安装配重外部再生电阻过热信号的误配线正确连接rH3 再生晶体异常:伺服放大器内置的再生处理用晶体管出现故障原因措施再生晶体管发生短路故障因再次接通电源重新显示时,更换伺服放大器注意:若再生晶体管发生生短路故障则有可能引起火,因此再生晶体管异常报警信号输出时请迅速将主电源置于OFFrH4 浪涌电流抑制电路异常:抑制电源接通时的浪涌电流的伺服放大器内部电路有可能发生故障原因措施伺服放大器出现故障更换伺服放大器周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:若周围温度在55℃以内,检测到该报警的情况下,不要再次运行,请更换伺服放大器oF 偏差超出:偏差超出检测值设定的伺服电机旋转量的位置偏差量累计于伺服放大器内部原因措施确认并修复动力线(U、V、W)的配线动力配线的连接错误(将伺服ON置于ON时发生报警)伺服电机不能机械性旋转确认制动器是否在运行输出转矩小增大PA1_27,28 :转矩值限制值偏差超出检测宽度小增大PA2_69:偏差超出检测值成为P控制状态将P运行信号OFF增益低实施增益调整脉冲列频率的加减速过急延长加减速时间AH 放大器过热:伺服放大器超过容许温度原因措施周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:有可能在有效转矩超过100%的情况下使用。
富士伺服驱动器报警代码
富士伺服驱动器报警代码、报警显示的含义
、报警的处理方法:
Ct控制电路异常:能伺服放大器内部的控制电源电压存在异常,内部电路有出现的故障的可性
三、关于报警复位
存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
报警的复位按以下任意方式进行:
将报警复位(RST:指令序列输入信号)置于ON-次后再置于OFF。
触摸屏上的试运行模式[FnOS]:实行报警复位。
在报警显示画面上同时按住[刈键和[V] 1秒钟以上。
使用PC加载器的“监控”指令上的报警复位。
报警复位后,返回到参数“ PA2_77:初始显示(触摸屏)"上所设定的显示内容。
富士伺服驱动器报警代码
富士伺服驱动器报警代码、报警显示的含义
、报警的处理方法:
三、关于报警复位
存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
报警的复位按以下任意方式进行:
将报警复位(RST指令序列输入信号)置于ON—次后再置于OFF。
触摸屏上的试运行模式[FnOS]:实行报警复位。
在报警显示画面上同时按住[A ]键和[V]1秒钟以上。
使用PC加载器的“监控”指令上的报警复位。
报警复位后,返回到参数“ PA2_77:初始显示(触摸屏)”上所设定的显示内容。
富士伺服驱动器报警代码
富士伺服驱动器报警代码
二、报警的处理方法:
三、关于报警复位
存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
报警的复位按以下任意方式进行:
●将报警复位(RST:指令序列输入信号)置于ON一次后再置于OFF。
●触摸屏上的试运行模式[FnOS]:实行报警复位。
●在报警显示画面上同时按住[Λ]键和[V]1秒钟以上。
●使用PC加载器的“监控”指令上的报警复位。
●报警复位后,返回到参数“PA2_77:初始显示(触摸屏)”上所设定的显示内容。
富士伺服驱动器报警代码
措施
电源电压过高(刚接通电源后)
确认电源电压在规格值内
根据上下搬运及卷绕用途不可消耗再生电力
延长减速时间
降低伺服电机的转速
延长单循环时间,降低运行频度
提高外部再生电阻器的功率
安装配重
外部再生电阻过热信号的误配线
正确连接
rH3再生晶体异常:伺服放大器内置的再生处理用晶体管出现故障
原因
措施
再生晶体管发生短路故障
确认制动器是否在运行
输出转矩小
增大PA1_27,28:转矩值限制值
偏差超出检测宽度小
增大PA2_69:偏差超出检测值
成为P控制状态
将P运行信号OFF
增益低
实施增益调整
脉冲列频率的加减速过急
延长加减速时间
AH放大器过热:伺服放大器超过容许温度
因再次接通电源重新显示时,更换伺服放大器
注意:若再生晶体管发生生短路故障则有可能引起火,因此再生晶体管异常信号输出时请迅速将主电源置于OFF
rH4浪涌电流抑制电路异常:抑制电源接通时的浪涌电流的伺服放大器内部电路有可能发生故障
原因
措施
伺服放大器出现故障
更换伺服放大器
周围温度超过55℃
将周围温度保持在40℃以下
原因
措施
多个端子分配同一输入信号
CONT信号设定时不要设定同一序号
oL1过载1:轴锁定等在短时间检测出的
oL2过载2:转矩的有效值超过伺服电机的容许值
原因
措施
伺服电机不能机械性旋转
确认并修复动力线(U、V、W)的配线
确认制动器是否在运行
较之伺服电机功率机械系统较重
根据负载率重新检查伺服电机功率
若转速低则装入减速机
富士伺服驱动器报警代码(完整资料).doc
【最新整理,下载后即可编辑】
富士伺服驱动器报警代码一、报警显示的含义
二、报警的处理方法:
三、关于报警复位
存在报警复位不能解除的报警。
对于报警复位不能解除的报警,请在切为一次电源后(或切断前)按照“第三节报警的处理方法”排除报警原因,然后再次接通电源,以此进行复位。
报警的复位按以下任意方式进行:
将报警复位(RST:指令序列输入信号)置于ON一次后再置于OFF。
●触摸屏上的试运行模式[FnOS]:实行报警复位。
●在报警显示画面上同时按住[Λ]键和[V]1秒钟以上。
●使用PC加载器的“监控”指令上的报警复位。
●报警复位后,返回到参数“PA2_77:初始显示(触摸屏)”上
所设定的显示内容。
【最新整理,下载后即可编辑】。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、检查
1、警报检出内容
(图1)
(按键面板的7段LED显示器以秒的间隔闪烁。
)
2、警报检出时的动作
(1)在检出的同时自由运转
(图2)
(2)以最大转矩减速,停止后自由运转
(图3)
二、维护
1、过电流
【显示】
(图4)
【检出内容】
主回路晶体的输出电流超过规定值。
【要因与处置】
(图5)
伺服马达的动力沛县有可能漏电或短路。
通常,对地间有数MΩ以上,线圈之间的电阻值均衡。
2、过速度
【显示】
(图6)
【检出内容】
伺服马达的回转速度超过最高速度的倍。
【要因与处置】
(图7)
马达的回转速度有可能出现峰突。
(图8)
3、过电压
【显示】
(图9)
【检出内容】
伺服驱动器内部的直流中间电压比上限值大。
【要因与处置】
(图10)
可以在按键面板的监视模式确认内部的中间电压。
On 16:直流中间电压(最大值)On 17:直流中间电压(最小值)约在420V时检出电压。
4、编码器异常
【显示】
(图11)
【检出内容】
伺服马达内部的编码器可能已损坏。
【要因与处置】
(图12)
编码器内部的CPU是以自我诊断的结果来检出警报的。
这时,伺服驱动器马达之间正在进行通信。
5、控制电流异常
【显示】
(图13)
【检出内容】
伺服驱动器内部的控制电源发生异常,有损坏的可能性。
【要因与处置】
(图14)
6、记忆体异常
【显示】
(图15)
【检出内容】
保存在伺服驱动器EEPROM内部的参数内容已损坏。
【要因与处置】
(图16)
发生记忆体异常时,请执行参数的初始化。
执行初始化之后仍然会检出记忆体异常时,必须更换驱动器。
7、回生晶体过热
【显示】
(图17)
【检出内容】
伺服驱动器内装的回生处理用晶体过热。
【要因与处置】
(图18)
8、编码器通信异常
【显示】
(图19)
【检出内容】
安装于伺服马达的编码器无法与伺服驱动器通信。
【要因与处置】
(图20)
伺服马达的编码器配线有可能脱落或是断线。
伺服驱动器与编码器之间是串列通信。
请使用选购品连接线或是指定的电线。
编码器配线的电压振幅约+5V,所以请勿铺设在强磁界、强电界的场所。
并且应远离伺服驱动器本体、变频器及电磁接触器。
(100mm以上)
9、CONT重复
【显示】
(图21)
【检出内容】
重复定义伺服驱动器的控制输入端子。
【要因与处置】
(图22)
10、过负载
【显示】
(图23)
【检出内容】
伺服驱动器的转出转矩(指令值)的实效值超过所组合的伺服马达的容许值。
(以伺服驱动器内装的电子热动电驿检出)
【要因与处置】
(图24)
在恒速度及停止时发生过负载时,必须重新评估马达容量。
高频度运转中发生过负载时,请调低运转频度。
如果在此状态不会检出过负载的话,主要原因有可能是因为加速度过度频繁所造成的。
无论是哪一种情形,都请在伺服驱动器按键面板的监视模式中确认OL热动电驿值。
11、不足电压
【显示】
(图25)
【检出内容】
供给伺服驱动器的电源比规格范围的最低电压还低。
【要因与处置】
(图26)
有可能因瞬时停电等因素导致电压下降。
此外,也有可能是电源容量不足。
电源环境不良时,可透过参数26号的设定来忽略电压的检出。
此时,若参数27号的设定是选择自由运转的话,发生瞬时停电时仍可以继续运转。
可由按键面板的显示来确认低电压。
(图27)
可在按键面板的监视模式确认直流中间电压。
低电压会在直流中间电压约210V时检出。
12、回生电阻过热
【显示】
(图28)
【检出内容】
被连接在伺服驱动器的回生电阻器的发热量超过上限值。
【要因与处置】
(图29)
13、偏差
【显示】
(图30)
【检出内容】
偏差值(指令现在位置与归还现在位置的差量)超过参数22号偏差OVER幅的设定值。
【要因与处置】
(图31)
标准参数22号的初期值为20000(×100)脉波。
常偏差量超过2000000脉波时,会检出偏差over警报。
通常,伺服驱动器的使用方法中,偏差量是与回转速度成比例变大。
因为马达轴1回转是131072脉波,所以马达轴会在约15回转时检出偏差over。
在运作指令[RUN]为ON的时候检出偏差over时,有可能是因为调换了伺服马达的动力配线。
14、驱动器过热
【显示】
(图32)
【检出内容】
伺服驱动器的冷却散热板温度超过100℃(大约)。
【要因与处置】
(图33)
伺服驱动器要在周围温度为+55℃以下使用。
伺服驱动器内部的大容量电容器的寿命受周围温度的影响很大。