华南理工自动控制原理习题分析第四章
自动控制原理 孟华 第4章习题解答

4-1如果单位反馈控制系统的开环传递函数1)(+=s K s G 试用解析法绘出K 从零向无穷大变化时的闭环根轨迹图,并判断下列点是否在根轨迹上: (2,j 0),(0+j 1),(3+j 2)。
解:根轨迹如习题4-1答案图所示。
(-2,+j 0)在根轨迹上;(0,+j 1), (-3, +j 2) 不在根轨迹上。
习题4-1答案图4-2设单位反馈控制系统的开环传递函数。
)12()13()(++=s s s K s G试用解析法给出开环增益K 从零增加到无穷时的闭环根轨迹图。
解: 解析法:K =0时:s=-1/2,0;K =1:s=-122;K =-∞:s=-∞,-1/3。
根轨迹如习题4-2答案图所示。
习题4-2答案图4-3 已知系统的开环传递函数)1()1()()(-+=s s s K s H s G ,试按根轨迹规则画出该系统的根轨迹图,并确定使系统处于稳定时的K 值范围。
解:分离点:;会合点: ;与虚轴交点:±j 。
稳定的K 值范围:K >1。
根轨迹如习题4-3答案图所示。
习题4-3答案图4-4已知一单位反馈系统的开环传递函数为2*)4)(1)(1()(+-+=s s s K s G (1)试粗略画出K *由0到∞的根轨迹图;(2)分析该系统的稳定性。
解:稳定性分析:系统不稳定。
根轨迹如习题4-4答案图所示。
-10-505-8-6-4-22468Root LocusReal AxisI m a g i n a r y A x i s习题4-4答案图4-5 设控制系统的开环传递函数为)164)(1()1()()(2*++-+=s s s s s K s H s G ,试绘制系统根轨迹图,并确定使系统稳定的开环增益范围。
解:渐近线:=60°,180°;=-2/3;复数极点出射角55°;分离会合点和;与虚轴交点和;使系统稳定的开环增益为 <K < (即 <K *<。
华南理工大学网络教育自动控制原理-随堂练习答案
自动控制原理随堂练习第一章绪论答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.A. B. C.A. B. C.A. B. C.A. B. C.答题:对. 错答题:对. 错答题: A. B. C. D. 答题: A. B. C. D. 答题: A. B. C. D. 答题: A. B. C. D.某系统的传递函数为,该传递函数有(答题: A. B. C. D.某典型环节的传递函数是,则该环节是(答题: A. B. C. D.已知系统的单位脉冲响应函数是,则系统的传递函数是(A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.某系统的传递函数是,则该可看成由(答题: A. B. C. D.答题: A. B. C. D. 答题: A. B. C. D. 答题:对. 错答题:对. 错答题:对. 错.闭环极点为的系统.闭环特征方程为的系统.阶跃响应为的系统.脉冲响应为的系统答题: A. B. C. D..最大超调量 D答题: A. B. C. D.已知二阶系统的传递函数是,则该系统属于答题: A. B. C. D.答题: A. B. C. D.已知系统的开环传递函数为,则其型别为(答题: A. B. C. D.已知系统的开环传递函数为,则该系统的开环增益为答题: A. B. C. D.若某负反馈控制系统的开环传递函数为,则该系统的闭环特征方程为. B.. D答题: A. B. C. D.某单位反馈系统的开环传递函数为,. B. C. D.答题: A. B. C. D.答题: A. B. C. D.系统在作用下的稳态误差,说明(.系统型别 B答题: A. B. C. D.答题: A. B. C. D. 答题: A. B. C. D. 答题: A. B. C. D..最大超调量 DA. B. C.A. B. C.16.特征方程最靠近虚轴的根和虚轴的距离表示系统的稳定裕度,越大则系统的稳定性越低。
华南理工大学网络教育学院自动控制原理随堂练习
A. B. C.A. B. C.A. B. C.A. B. C.A. B. C.A. B. C.A. B. C.A. B. C.A. B. C.A. B. C...A. B. C.A. B. C.A. B. C.A. B. C.某系统的传递函数为,该传递函数有(A. B. C.某典型环节的传递函数是,则该环节是(A. B. C.已知系统的单位脉冲响应函数是,则系统的传递函数是(A. B. C. D.A. B. C.A. B. C.某系统的传递函数是,则该可看成由(A. B. C.A. B. C.A. B. C.....闭环极点为的系统.闭环特征方程为的系统.阶跃响应为的系统.脉冲响应为的系统A. B. C..最大超调量 DA. B. C.已知二阶系统的传递函数是,则该系统属于A. B. C.A. B. C.已知系统的开环传递函数为,则其型别为(A. B. C.已知系统的开环传递函数为,则该系统的开环增益为A. B. C.若某负反馈控制系统的开环传递函数为,则该系统的闭环特征方程为. B.. DA. B. C.某单位反馈系统的开环传递函数为,则该系统要保持稳定的. B. C. D.A. B. C.A. B. C.系统在作用下的稳态误差,说明(.系统型别 BA. B. C.A. B. C.A. B. C.A. B. C..最大超调量 DA. B. C.A. B. C.特征方程最靠近虚轴的根和虚轴的距离表示系统的稳定裕度,越大则系统的稳定性越低。
.....A. B. C.A. B. C.系统渐近线与实轴正方向夹角为(A. B. C.A. B. C.A. B. C.A. B. C.、 B、、 D、A. B. C.A. B. C.A. B. C.A. B. C.A. B. C.....A. B. C.A. B. C.已知单位反馈系统的开环传递函数为,则根据频率特性的物理意义,该闭环系统输入信号为时系统的稳态输出为(A. B.C. D.A. B. C.A. B.C. D.A. B. C.传递函数G(S)为()。
自动控制原理第4章习题解——邵世凡
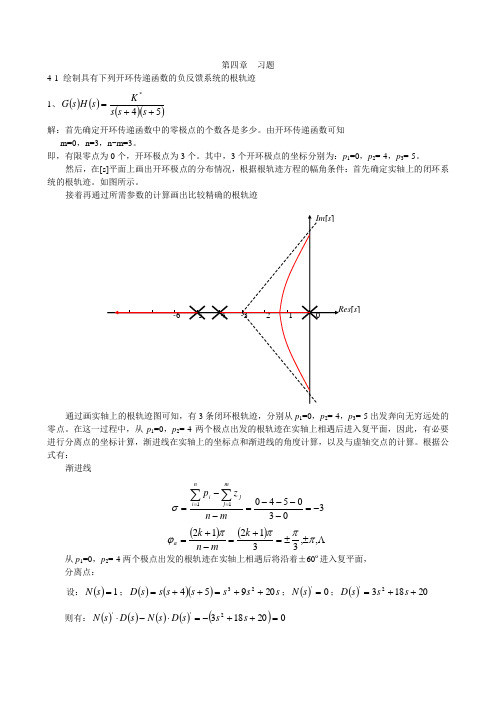
第四章 习题4-1 绘制具有下列开环传递函数的负反馈系统的根轨迹1、()()()()54*++=s s s K s H s G解:首先确定开环传递函数中的零极点的个数各是多少。
由开环传递函数可知 m=0,n=3,n -m=3。
即,有限零点为0个,开环极点为3个。
其中,3个开环极点的坐标分别为:p 1=0,p 2=-4,p 3=-5。
然后,在[s]平面上画出开环极点的分布情况,根据根轨迹方程的幅角条件:首先确定实轴上的闭环系统的根轨迹。
如图所示。
接着再通过所需参数的计算画出比较精确的根轨迹通过画实轴上的根轨迹图可知,有3条闭环根轨迹,分别从p 1=0,p 2=-4,p 3=-5出发奔向无穷远处的零点。
在这一过程中,从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后进入复平面,因此,有必要进行分离点的坐标计算,渐进线在实轴上的坐标点和渐进线的角度计算,以及与虚轴交点的计算。
根据公式有:渐进线303054011-=----=--=∑∑==mn zp n i mj jiσ()() ,,331212ππππϕ±±=+=-+=k mn k a从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后将沿着±60º进入复平面,分离点:设:()1=s N ;()()()s s s s s s s D 2095423++=++=;()0'=s N ;()201832'++=s s s D则有:()()()()()0201832''=++-=⋅-⋅s s s D s N s D s N[s ]0201832=++s s解得方程的根为s 1= -4.5275(不合题意舍去);s 2= -1.4725 得分离点坐标:d = -1.4725。
与虚轴的交点:在交点处,s=j ω,同时也是闭环系统的特征根,必然符合闭环特征方程,于是有:()020********=++--=+++*=*K j j K s s sj s ωωωω整理得: 0203=-ωω;092=-*ωK 解得01=ω;203,2±=ω;18092==*ωK 最后,根据以上数据精确地画出根轨迹。
华南理工自动控制原理习题分析共58页
15、机会是不守纪律的。——雨果
ห้องสมุดไป่ตู้ 1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
华南理工自动控制原理习题分 析
11、战争满足了,或曾经满足过人的 好斗的 本能, 但它同 时还满 足了人 对掠夺 ,破坏 以及残 酷的纪 律和专 制力的 欲望。 ——查·埃利奥 特 12、不应把纪律仅仅看成教育的手段 。纪律 是教育 过程的 结果, 首先是 学生集 体表现 在一切 生活领 域—— 生产、 日常生 活、学 校、文 化等领 域中努 力的结 果。— —马卡 连柯(名 言网)
自动控制原理第四章习题解答

4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。
自动控制原理习题解答

第三章3-3 已知各系统的脉冲响应,试求系统的闭环传递函数()s Φ:()()1.25(1)()0.0125;(2)()510sin 445;(3)()0.11t t k t e k t t t k t e --==++=-解答: (1) []0.0125()() 1.25s L k t s Φ==+(2)[])222223222()()5sin 4cos 4544451116s L k t L t t t s s s s s s s s ⎡⎤Φ==+⎢⎥⎣⎦⎫=++⎪++⎭⎫++⎪⎝⎭=⎛⎫+ ⎪⎝⎭(3)[]()111()()0.1110313s L k t s s s s ⎡⎤⎢⎥Φ==-=⎢⎥+⎢⎥+⎣⎦ 3-4 已知二阶系统的单位阶跃响应为)6.1sin(5.1210)(1.532.1︒-+-=t t h et试求系统的超调量σ%,峰值时间tp和调节时间ts.解答:因为0<ξ<1,所以系统是欠阻尼状态。
阻尼比ξ=cos(1.53︒)=0.6,自然频率26.0/2.1==w n, 阻尼振荡频率wd=6.16.01212=-⨯=-=ξw w n d1. 峰值时间tp的计算96.16.1===ππwt dp2. 调节时间t s 的计算9.226.05.35.3=⨯==w t ns ξ3. 超调量σ%的计算%48.9%1006.0%100%221/6.01/=⨯=⨯=-⨯---eeππξξσ3-5设单位反馈系统的开环传递函数为)6.0(14.0)(++=s s s s G ,试求系统在单位阶跃输入下的动态性能。
解答:方法一:根据比例-微分一节推导出的公式)135(6.014.0)12/()1()(+⨯⨯+=++=s s s s s s K s G w T n d ξ1)5.2(4.0114.0)6.0(14.01)6.0(14.0)2()(1)()(22222+++=+++=+++++=+++=+=s s s s s s s s s s s zs z S G s G s s s w w s w nn dn ξφ)1()](1[12)1sin(1)(222222ξξξξξξξπψξddnddndnn ddn tarctg z arctg z r t w r t h www w zw e n d -+--+-=-+-=ψ+-+=-把z=1/Td=2.5,1=wn,5.0=ξd 代入可得)3.8323sin(5.005.11)7.9623sin(5.005.11)( ---=--+=t e t t e t t h峰值时间的计算0472.1)1(2=-=ξξβdddarctg ,-1.6877=ψ158.312=--=ξβψdndpwt超调量得计算%65.21%10011%22=⨯--=-ξξξσddetrpd调节时间得计算29.6)ln(21ln )2ln(2131222=--+-+=-ww w z t ndn n d sd z ξξξ方法二:根据基本定义来求解闭环传递函数为114.0)6.0(14.01)6.0(14.0)(1)()(2+++=+++++=+=s s s s s s s s S G s G s s φ当输入为单位阶跃函数时 )232()21(21.0)232()21(2)21(116.01)1(14.0)(22++-++++-+=++--+=+++=s s s s s s s s s s s C s s 得单位阶跃响应)23sin(1.0)23cos(1)(2121t t t h e et --⨯--=)3.8423sin(121+-=-t et )0(≥t 1. 峰值时间tp的计算 对h(t)求导并令其等于零得-0.5023)23cos()23sin(3.843.842121=⨯+-+︒-︒-t e t ep p t t p p3)23tan(3.84=+︒t p t p =2.9 2. 超调量σ%的计算%100)()()(%⨯∞∞-=h h h t p σ=17.49%3. 调节时间t s 得计算05.0)84.523sin(21≤-⨯-t est s5.33=t s 3-6.已知控制系统的单位阶跃响应为6010()10.2 1.2t t h t e e --=+- ,试确定系统的阻尼比ζ和自然频率n ω。
华南理工大学网络教育自动控制原理随堂练习答案讲解

第一章绪论当前页有10题,你已做10题,已提交10题,其中答对10题。
1. 闭环系统的特点不包含下列哪项()。
A •负反馈B •控制精度较低C .可减少或消除偏差D .适应性好答题:' A. '* B. ' C. D.(已提交)参考答案:B问题解析:2. 系统采用负反馈形式连接后,则()。
A•一定能使闭环系统稳定B •系统动态性能一定会提高C •一定能使干扰引起的误差逐渐减小,最后完全消除D •需要调整系统的结构参数,才能改善系统性能答题:A.釦” [2|c. ^M D.(已提交)参考答案:D问题解析:3. 自动控制系统中测量被控量并进行信号转换,再反馈到输入端的元件是()。
A •比较元件B •校正元件C •测量反馈元件D •执行元件答题: A. B. * C. D.(已提交)参考答案:C问题解析:4. 火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫()。
A. 恒值调节系统B.离散系统C.随动控制系统D.数字控制系统答题:匚]A. B. * C.「I ID.(已提交)参考答案:C问题解析:5. 随动系统对()要求较高。
A. 快速性B.稳定性C.准确性D.振荡次数答题:f A. ' B. ' C. D.(已提交)参考答案:A问题解析:6. 衡量系统稳态精度的重要指标时()A •稳定性B •快速性C •准确性D •安全性答题:• A. B. C. D.(已提交)参考答案:C问题解析:7. 自动控制系统的主要特征是()。
A •在结构上具有负反馈通路,以求得偏差信号B .由偏差产生控制作用以便纠正偏差C •系统开环D .控制的目的是减少或消除偏差答题:# A. * B. C. * D.(已提交)参考答案:ABD问题解析:8. 自动控制系统按照不同的分类原则有不同的分类结果,下列系统哪些是按照同一原则进行分类的()。
A •连续系统B •程序控制系统C •恒值控制系统D •随动系统答题: A.庁I B. C.二I D.(已提交)参考答案:BCD问题解析:9. 自动控制系统按描述元件的动态方程分()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
渐近线 :
n
m
( pj) ( zi)
σ a j1
i 1
nm
0
2 3
5
7 3
,
.
θ
180 (2k nm
1) 60 ,180
自动控制原理习题
分析第四章4-2(1)
[ 2,0]根迹区段有分
离点.
N(s) 1, N '(s) 0
D(s) s(s 2)(s 5)
s 3 7s 2 10s
题4-2(2)G(s)=Kg/s(s2+8s+20)系统的根轨迹
5 4 3 2 1 0 -1 -2 -3 -4 -5
-10
-8,Kg=160
-63.4 -8/3
-8
-6 Real A-x4is
-2
4.47Kg=160
-4.47Kg=16
0已知系统开环传递函数 Nhomakorabea,绘制根轨迹图.
自动
G(s)
s(s
Kg 1)(s 2)(s
求复数开环极点
:
p 2 , p 3 根轨迹的出射角
m
n
a1 180 ( 2 k 1 ) i j
i1
j 2
180 90 (180 arctan 0 . 5 )
63 . 4
画出根轨迹图如下
.
Imaginary Axis
自动控制 原理习题 分析第四 章4-2(2)
D'(s) 2s 4,代入 :
N'(s)D(s) N(s)D '(s) 0得 :
s2 10s 17 0,求解得 :
s1 2.171,-s 2 7.828
Kg1
7.828 1 7.828 3 7.828 5
0.343
Kg2
2.171 1 2.171 3 2.171 5
s3
1
10
s2
7
Kg
s 1 (70 K g )/7
s0
Kg
令70 K g 0
可解得K
gp 70
代回s 2 行 : 7s 2 70 0
. 解得 : -s 1,2 j 10
已 知 系 统 开 环 传 递 函 数 ,绘 制 根 轨 迹 图 .
自动 控制
G(s)
s(s
2
Kg 8s
n , 20)
.
11.66
自动控制原理习题 分析第四章4-2(4)
分离点求法2.
n 2, m 1,
D '(s) 3s 2 14s 10, 由
N '(s)D(s) N(s)D '(s) 0
根迹同虚轴交点用特闭征环方:程 得3s 2 14s 10 0,
s(s2)(s5)Kg 0 s3 7s2 10sKg 0 s j ω 代 入得,:
s 1 3.78(不在根迹区
段)
s 2 0.883, 相应K g
D '(s) 3s 2 16s 2 0,代 入 :
N'(s)D(s) N(s)D '(s) 0得 :
3s 2 16s 2 0 0,求解得 :
s1
10 3
,-s
2
2
.
根轨迹与虚轴交点
:
令s jω代入特征方程:
s(s 2 8s 20) K g 0得:
ω 2 5 ,K g 160.
0.883 0.883 2 •
jω3 7ω2 j10ωKg 0
• 0.883 5 4.061
即:Kg 7ω2 0和10ω ω3 0,解. 得:ω 10,Kg 70
自动控制原理习题 分析第四章4-2(1)
根迹同虚轴交点法2
:
闭环特征方程
:
s(s 2)(s 5) K g 0 s 3 7s 2 10s K g 0
设开环系统的零、极点 分布如图所示, 试绘制相应的根轨迹草 图。
(a)
j
(b)
自动控制原理习题 分析第四章4-1(1)
j
×
×
××
(c)
j
×
×
(d)
j
×
.
×
×
设开环系统的零、极点 分布如图所示,
试绘制相应的根轨迹草 图。
(e)
j
(f)
自动控制原理习题 分析第四章4-1(1)
j
×
×
×
×
×
×
(g)
×
j
3,m 0, p 1 n m 3,即 有
0 , p 2,3 4 三 条渐近线
2 。
j
原理 习题
a
p1 p2 p3 nm
8 , 3
60 ,180
分析 第四 章4-
实 轴 根 迹 区 段 :( ,0 ]区 段 有 分 离 点 .
2(2)
分 离 点 求 法 .N(s) 1,N'(s) 0,D(s) s(s 2 8s 2 0 ),
- s 2 1 .5444 (不在根迹, 舍去) ,-.s 3 0 .3990 .
根轨迹 与虚轴交, 点闭环特征方:程
自动
s4 8s3 17s2 10sKg0
控制
原理
令sjω得:ω
5 2
1.11, 8 Kg19.6875
习题 分析
画出根轨迹图如下:
第四
章4-
2(3)
.
已 知 系 统 开 环,传 绘递 制函 根数 轨 迹 图 .
×
×
(h)
×
.
j
×
×
已 知 系 统 开 环,绘 传制 递根 函轨 数迹 自动控图制原.理习题
分析第四章4-2(1)
G(
s)s (
0
K .51s)
( 0 .12)s0 .50
.
K 2 s(2s)
(s5 )
s
Kg (s2 )
(s5
),pK1g01,p02nK,23m,,p3 0,5
根轨迹实轴区段
:( , 5] [ 2,0]
分离点求法.N(s) 1,N '(s) 0,
D(s) s(s 1)(s 2)(s 5) s 4 8s 3 17s 2 10s,
D '(s) 4s 3 24s 2 3 4 s 1 0 ,代入 :
N '(s)D(s) N(s)D '(s) 0得 :
2s 3 1 2 s 2 17 s 5 0, 求解得 : s 1 4 .0565 ,
自动控制
G
(
s)(
Kg( s5 ) s1 )(s3
),nn2mm,11即 ,,-有 z-一 5,p1条 -渐 θ 1,p近 218线 03 原分,理析习第题四
实 轴 根 迹:(区 ,段 5 ][,3,1 ]. [- 3区 ,-段 1 ]有 分 离 章4-点 2(4).
分离点求法1.N(s ) s 5,N'(s) 1,D(s) (s 1)(s 3) s2 4s 3,
n 4, m 0, p 1 0, p 2 1, 控制
5)
, n
p 3 - 2 , p 4 m 4 ,即有
5 四 条渐近线
原理
。
习题 分析
a
p1 p2 p3 nm
p4
8 4
2,
45 , 135
第四 章4-
实轴根迹区段 :[-5,-2], [-1, 0 ]区段有分离点.
2(3)