基于场景的非均匀校正算法在红外系统中的应用
第36卷 第7期 激光与红外Vol.36,No.7 2006年7月 LASER & I N FRARE D July,2006
文章编号:100125078(2006)0720568203
基于场景的非均匀校正算法在红外系统中的应用
邓希宁,任海富,李凌杰
(华北光电技术研究所,北京100015)
摘 要:在分析了几种非均匀校正算法特点的基础上,提出了一种易于硬件实现的新算法,并
给出了具体的硬件实现方法。与许多基于场景的非均匀校正算法不同,它不依赖目标的运动
来抑制固定的图像噪声,而是将图像中的固定图像噪声和随时间温度的缓慢变化带来的信号
漂移,看作是一种低频信号,利用时域高通滤波,将低频滤除;由于滤除的低频信号远低于帧
频,因此不会影响图像细节。应用结果表明,该算法能有效消除红外探测器的非均匀噪声并有
效抑制温度变化带来的漂移。
关键词:4N红外焦平面探测器;基于场景的非均匀校正法;FPG A;参数提取
中图分类号:T N215 文献标识码:A
Appli cati on i n I nfrared Syste m by a Scene2based
Nonun i for m ity Correcti on Algorith m
DENG Xi2ning,RE N Hai2fu,L IL ing2jie
(North China Research I nstitute of Electr o2op tics,Beijing100015,China)
Abstract:On the basis of analysis f or several kinds of nonunifor m ity correcti on algorith m s,a new scene2based nonuni2
f or m ity correcti on algorith m easy t o i m p le ment in hard ware is put f or ward.And the i m p le mentati on method in hard2
ware is p resented in detail.D ifferent fr om other scene2based algorith m s,it does not supp ress the noise by the move2
ment of the object,but considers the fixed2pattern noise and the signal drift foll owed by temperature as l ow frequency
signal,and it can be filtered by the te mporal high2pass filter correcti on(T HPFC).The i m age details are not influ2
enced,because the frequency of the l ow frequency signal filtered ismore less than the fra me frequency.The results of
app licati on p r ove that this algorith m can eli m inate the nonunif or m ity noise and supp ress the signal drift varies with
te mperature effectively.
Key words:4N I RFP A;scene-based nonunif or m ity correcti on;FPG A;para meter extracti on
1 引 言
目前在我国的红外成像系统中的探测器主要有凝视型红外焦平面探测器和4N型红外焦平面探测器,凝视焦平面器件又分为制冷型和非制冷型探测器,而4N型焦平面器件属线列探测器,与光机扫描器一起构成扫描型成像系统,多用于系统视场大,水平分辨率高的应用领域。不论哪种焦平面器件,由于红外探测器各光敏元的响应率不一致性及器件随温度的漂移的不一致性,使得探测器输出是非均匀的,所以非均匀校正方法成为红外系统必不可少的关键技术之一。目前常用的非均匀校正方法分为定标法校正和基于场景的校正。定标法要求在特定的温度下,由黑体产生均匀辐射背景,对指定焦平面器件进行参数的提取。按一定的算法得出该探测器的校正参数,在成像过程中对探测器输出进行校正。基于场景的校正法,其校正参数的提取不需要对系统进行干预,系统正常使用过程中自动对当前探测
作者简介:邓希宁(1957-),女,高级工程师,研究方向为红外系统的信号与图像处理。
收稿日期:2005206219
器输出的非均匀性进行参数的统计、计算和提取,并实时更新参数,实时校正。定标校正法技术成熟、硬件实现容易、校正效果明显、图像较为均匀,缺点是长时间工作对探测器的漂移需要周期性采样定标,更新参数,需遮挡镜头停止工作。基于场景的校正法是一种实时校正,参数提取时不影响使用,但其技术还不成熟,好的算法实现起来繁琐,硬件要求资源多、速度快,能实现的算法需要经过近似,简化,校正效果也不尽相同。所以目前大多数成像系统仍是以定标法为主,随着红外系统应用领域的不断扩展,对校正的自适应性需求越来越强烈,对基于场景的校正算法研究也越来越受到人们的关注。我们仅就对基于场景算法研究应用的体会,介绍一种能实际应用的新的改进的校正算法。
2 算法原理
基于场景的非均匀校正算法,目前常被讨论的有恒定范围统计法、卡尔曼滤波法、轨迹跟踪法、时域高通滤波法、神经网络法等等。在实现方法上一般归为统计法、滤波法、阀值法等,但碍于硬件实现的局限性,基于场景大部分算法只能作为研究,仿真,而实际应用时不易实现。
对于4N型探测器的应用系统,因为探测器元数少,探测器本身每一元的温漂所带来不均匀性的影响要比凝视焦平面阵列温漂影响明显得多。并不是它漂移量比凝视器件的大,而是它在图像上表现为某一行整体往一个方向的变化,其不一致性影响了图像的均匀性,使得这种影响更加明显。所以4N 型探测器的图像非均匀性校正的实时性更为迫切。然而4N型器件有它得天独厚的条件,需要计算的数据量少。在研究比较了诸多算法后,采用一种改进的时域高通滤波算法,利用FPG A和少量内部的储存器,不需占用外部资源,就能实现非均匀校正。设系统需对m×n大小的图像进行校正,将时域高通滤波算法经过近似简化,校正公式为:
y k+1(i,j)=G k(j)g[x k+1(i,j)-R K(j)]+R K
(1)其中,x
k+1
(i,j):当前帧信号输入。
R K(j):第j列k帧低频分量;R K(j)=
1
kgm
∑
k
t=1
∑
m
i=1
x
(t,i,j)(2)
R K:k帧的平均电平(亮度);R K=1
n
∑
j=n
j=1
R K(j)
(3)
G k(j):第j列校正系数;G k(j)=
R K
R K(j)
(4)
其中,K为累计帧数或叫累计周期,R
K
(j)、G k(j)、R K
都是累计周期中的统计值,每K帧刷新一次,在K
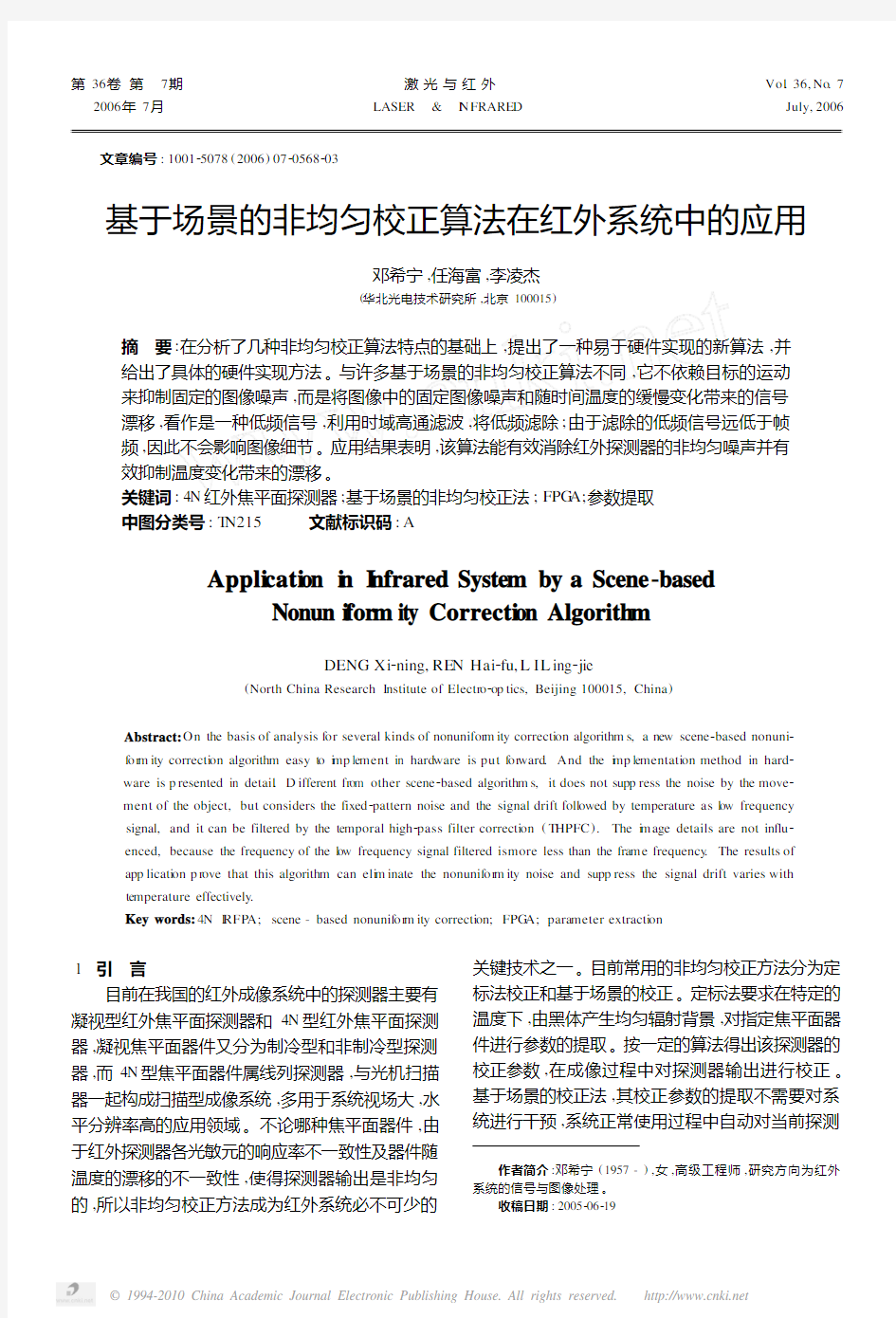
+1累计周期中求Y值用。校正流程如图1所示
。
图1 校正流程图
3 实现方法
以512×288的大小图像为例,实时采集校正参
数,是实现基于场景校正算法的主要工作,统计帧数
K为256帧,x(i,j)数据为12bit数据,FPG A用A l2
tera公司的EP I S25,需用FPG A内部3块存储器,其
大小分别为RAM l=288×32bit、RAM2=288×
16bit、RAM3=288×16bit,其中RAM l为双口RAM,
为节省资源,RAM2、RAM3用单口RAM就可以了。
用VHDL编写相应的控制时序和储存器的读写地
址,数据的统计运算及数据的校正程序。参数提取
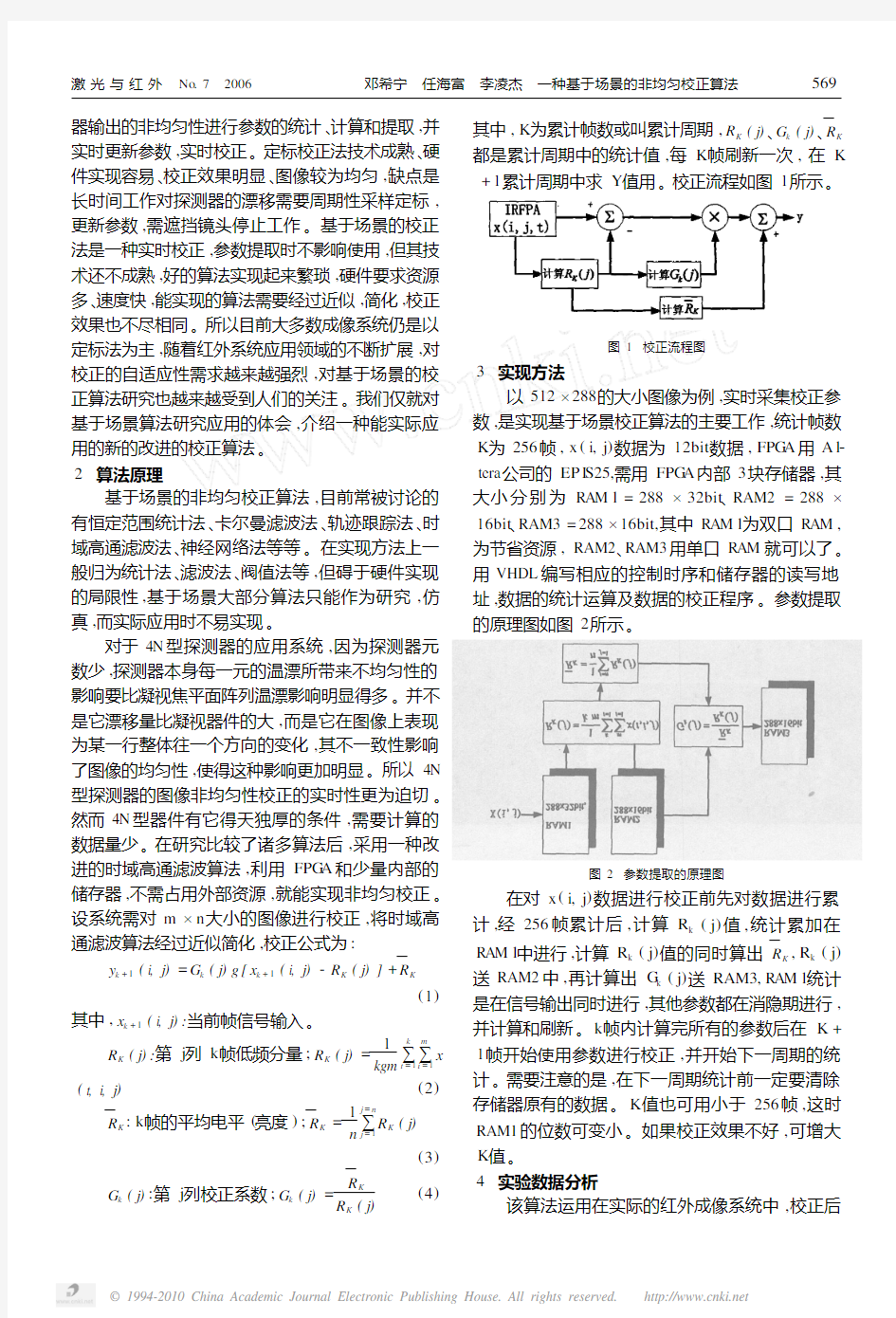
的原理图如图2所示
。
图2 参数提取的原理图
在对x(i,j)数据进行校正前先对数据进行累
计,经256帧累计后,计算R
k
(j)值,统计累加在
RAM l中进行,计算R k(j)值的同时算出R K,R k(j)
送RAM2中,再计算出G
k
(j)送RAM3,RAM l统计
是在信号输出同时进行,其他参数都在消隐期进行,
并计算和刷新。k帧内计算完所有的参数后在K+
1帧开始使用参数进行校正,并开始下一周期的统
计。需要注意的是,在下一周期统计前一定要清除
存储器原有的数据。K值也可用小于256帧,这时
RAM1的位数可变小。如果校正效果不好,可增大
K值。
4 实验数据分析
该算法运用在实际的红外成像系统中,校正后
965
激光与红外 No.7 2006 邓希宁 任海富 李凌杰 一种基于场景的非均匀校正算法
的图像结果如图3所示。图像均匀,细节清晰。此算法运算速度快,实时性强,占用资源少,场景变化时不影响图像的均匀性校正效果。一般取k ≥16帧,效果良好,验证了这种算法的使用价值
。
图3 校正后图像
5 结 论
该算法与许多基于场景的非均匀校正不同,它
,来抑制固定的图像噪声,而是将图像中的固定图像和随时间温度的变化带来的漂移,看作是一种低频信号,选用时域高通滤波,依赖对图像的多帧处理,将低频滤除。因为滤出的低频
信号远低于帧频,所以它对图像的目标和细节均不会有影响。对于背景复杂,画面格局均匀,其效果更好。由于不需要像定标法那样需周期性人为操作进行采样校正,所以适用于无人操作的设备上。当然,这种校正也有它不足的地方,当有强目标出现时会改变G K (j )校正效果,使得强目标旁边的背景偏低,出现背景黑影,这是需要进一步改进的地方。参考文献:
[1] scribner D A,sarkady K A,caulfied J T,et al .Non 2uni 2
for m ity correcti on for string I R focal p lane array using scene 2based techniques [A ].Pr oc .SP I E,1990,1,308:224-233.
[2] 郑瑞红,陈钱.基于场景的红外图像非均匀性校正算
法的研究[J ].光电子技术2003,23(4):241-244.
[3] 杨正兴,谈新权,尚小冬.基于场景的红外图像非均匀
性校正方法的综述[J ].光电子技术2003,23(2):135
-138.
[4] 刘会通,马红伟.自适应非均匀性校正中“鬼影”问题
的分析[J ].红外技术,2003,25(5):30-36
.
075激光与红外 第36卷
HDR及一些非均匀性校正算法
HDR High Dynamic Range ,即高动态范围,比如所谓的高动态范围图象(HDRI)或者高动态范围渲染(HDRR)。动态范围是指信号最高和最低值的相对比值。目前的16位整型格式使用从“0”(黑)到“1”(白)的颜色值,但是不允许所谓的“过范围”值,比如说金属表面比白色还要白的高光处的颜色值。在HDR的帮助下,我们可以使用超出普通范围的颜色值,因而能渲染出更加真实的3D场景。也许我们都有过这样的体验:开车经过一条黑暗的隧道,而出口是耀眼的阳光,由于亮度的巨大反差,我们可能会突然眼前一片白光看不清周围的东西了,HDR在这样的场景就能大展身手了。 HDR可以用3句话来概括:亮的地方可以非常亮暗的地方可以非常暗亮暗部的细节都很明显。HDR的处理在显卡中可以分为3个步骤:将画面用高光照动态范围渲染,并储存每个象素的亮度特性;将HDRI画面转成低动态范围的画面(RGBA或是sRGB);色彩和Gamma校正后传送到显示设备输出。 计算机在表示图像的时候是用8bit(256)级或16bit(65536)级来区分图像的亮度的,但这区区几百或几万无法再现真实自然的光照情况。HDR文件是一种特殊图形文件格式,它的每一个像素除了普通的RGB信息,还有该点的实际亮度信息。普通的图形文件每个象素只有0 -255的灰度范围,这实际上是不够的。想象一下太阳的发光强度和一个纯黑的物体之间的灰度范围或者说亮度范围的差别,远远超过了256个级别。因此,一张普通的白天风景图片,看上去白云和太阳可能都呈现是同样的灰度/亮度,都是纯白色,但实际上白云和太阳之间实际的亮度不可能一样,他们之间的亮度差别是巨大的。因此,普通的图形文件格式是很不精确的,远远没有纪录到现实世界的实际状况。所以,现在我们就要介绍一下高动态范围图像(简称HDRI)。 HDR高动态范围渲染目前是一种逐渐开始流行的显示技术,其技术出发点就是让计算机能够显示更接近于现实照片的画面质量。目前在民用领域看到最多HDR技术应用的必然是游戏了。 在现实中,当人从黑暗的地方走到阳光下时,我们的眼睛会不由自主的迷起来,那是因为在黑暗的地方,人为了更好的分辨物体,瞳孔张开很大,以便吸收光线;而突然到了光亮处瞳孔来不及收缩,视网膜上的视神经无法承受如此多的光线,人自然会迷上眼睛阻止大量光线冲击视神经。而电脑是不具备这种功能的。所以,HDR的最终效果因该是亮处的效果是鲜亮的,而黑暗处你也可以清晰的分辨物体的轮廓,位置和深度,而不是以前的一团黑。动态、趋近真实的物理环境是HDR的特效表现原则。 实际游戏中会发现井底水面反射的阳光在墙壁上动态的明亮反光,洞口的明亮天空也会稍微变弱些。这样就能更清晰的表现出水面的反光。如果此时低头看水面会发现水面直接将阳光反射到人眼中很刺眼,但仅仅1秒钟时间光线就会减弱,因为人眼适应了直接反射的阳光。 这就是游戏的曝光控制功能,模拟人眼自动适应光线变化的能力,而不是照相机。HDR并不仅仅是反射的光强度要高。在游戏中,如果你盯着一个面向阳光直射的物体,物体表面会出现丰富的光反射;如果盯着不放,物体表面的泛光会渐渐淡出,还原出更多的细节。HDR特效是变化的,因此称作高动态光照。 热成像的非均匀性校正算法有很多种,红外焦平面非均匀性校正算法主要分为基于定标的非均匀校正算法(如一点温度定标算法、二点温度定标算法、多点温度定标算法)和基于场景的自适应非均匀校正算法(如时域高通滤波(THPFC)算法、人工神经网络(ANNC)算法、恒定统计平均(Cs)校正算法等)。目前二点温度定标算法和多点温度定标算法是最为成熟的实用性算法,但是它需要周期性的对它维护,这给红外成像设备维护工作带来很多困难。而基于场景的非均匀
20-红外热像仪的研究和使用实验
实验二十 红外热像仪的研究和使用 红外热像仪是一种利用红外线辐射而拍摄的摄像仪,热成像显示系统是一种处理热信息的微机处理系统。红外热像技术与X 射线,B 超,CT ,磁共振和核显像原理不同,它不主动发射任何射线,而只接受物体辐射出的“热”线——红外线,从而形成物体的“热”影象,是物体的三维“热”(温度)分布图象。热像处理技术在军事上运用很广,而且即有相当重要的地位,如,夜间跟踪目标,武器瞄准器等。但在民用上的运用是这几年的事,比如,医学上通过热拍摄来分析人体各部分的热分布,从而找出病变的部分;电学中对电路板上各元器件的热分布的合理性的研究,从而改善各元器件的分布结构等等。 【实验目的】 1. 熟悉热像仪的基本结构原理。 2. 学会使用热颜色处理热源的软件包。 3. 观察和分析电路板的热分布特性。 4. 描绘电路板的热分布图。 【实验原理】 自然界存在着一种不为人们所注意的客观现象,这就是任何物体都具有一定的温度,它们都是“热”的,所不同的只是热的程度有差异而已。在物理学中,热是用绝对温度来表示的(即用K 表示)。因此,上述现象又可表示为:自然界不存在绝对温度为零的物体。 绝对温度=摄氏温度+273 热与光,电,磁一样,具有辐射特性(热辐射),只是辐射波长有长短。将热,光,电,磁等的辐射,按其辐射波长的长短依次排列,便是人们熟知的波谱(图1)所示。 10-5 0.2 0.4 0.75 1.00 波长(μm ) 图1 红外线在波谱中的位置 热辐射又称红外辐射,这是因为其辐射波长的位置与可见的红光相临并在其外。红外辐射为英国科学家赫胥尔于1800年所发现。 物体的红外辐射波长与其自身温度有关,服从维恩定律: C T m =λ (1) 式中:λm-----物体红外辐射的峰值波长(um ) T ------物体的绝对温度(K ) C ------常数2898。 从式(1)中可看出,物体绝对温度越高,其辐射波长越短;反之亦然。 物体的绝对温度不仅决定了物体辐射的波长,而且也确定了物体的辐射出射度(单位
红外热像仪用户手册终结版
IPRE-160 红外热像仪用户手册
! 警告、小心和注意 定义 !警告代表可能导致人身伤害或死亡的危险情况或行为。 !小心代表可能导致热像仪受损或数据永久丢失的情况或行为。 !注意代表对用户有用的提示信息。 重要信息–使用仪器前请阅读 !警告–本仪器内置激光发射器,切勿凝视激光束。激光规格为635 nm, 0.9mW, 二级。 !小心–因热像仪使用非常灵敏的热感应器,因此在任何情况下(开机或关机)不得将镜头直接对准强烈幅射源(如太阳、激光束直射或反射等),否则将对热像仪造成永久性损害! !小心 - 运输期间必须使用原配包装箱,使用和运输过程中请勿强烈摇晃或碰撞热像仪。!小心–热像仪储存时建议使用原配包装箱,并放置在阴凉干燥,通风无强烈电磁场的环境中。 !小心-避免油渍及各种化学物质沾污镜头表面及损伤表面。使用完毕后,请盖上镜头盖。 !小心 -为了防止数据丢失的潜在危险,请经常将数据复制(后备)于计算机中。 !注意 -在精确读取数据前,热像仪可能需要3-5分钟的预热过程。 !注意 -每一台热像仪出厂时都进行过温度校正,建议每年进行温度校正。 !小心 -请勿擅自打开机壳或进行改装,维修事宜仅可由本公司授权人员进行。
目录 ! 警告、小心和注意 (2) 1简介 (5) 1.1标准配置 (7) 1.2可选配置 (7) 2热像仪简介 (8) 2.1功能键 (8) 2.2接口 (11) 3基本操作 (12) 3.1电池安装及更换 (12) 3.1.1电池装卸 (12) 3.1.2更换电池 (13) 3.2电池安全使用常识 (14) 3.3快速入门 (15) 3.3.1获取热像 (15) 3.3.2温度测量 (15) 3.3.3冻结和存储图像 (17) 3.3.4回放图像 (17) 3.3.5导出存储的图像 (17) 4操作指南 (18) 4.1操作界面描述 (18) 4.1.1工作界面 (18) 4.1.2主菜单 (19) 4.1.3对话框 (20) 4.1.4提示框 (20) 4.2测温模式 (20) 4.3自动/手动 (21) 4.4设置 (22) 4.4.1测温设置 (22) 4.4.2测温修正 (23) 4.4.3分析设置 (24) 4.4.4时间设置 (25) 4.4.5系统设置 (26) 4.4.6系统信息 (27) 4.4.7出厂设置 (27) 4.5文件 (29) 4.5.1打开 (29) 4.5.2存储 (30)
JJF 1187-2019 热像仪校准规范-10页文档资料
热像仪校准规范 Calibration Specification for JJF 1187-2019 Thermal Imagers 本规范经国家质量监督检验检疫总局2019年1月31日批准,并自2019年4月30日起施行。 归口单位:全国温度计量技术委员会 主要起草单位:中国计量科学研究院 参加起草单位:广州飒特电力红外技术有限公司 本规范由全国温度计量技术委员会负责解释 本规范主要起草人: 柏成玉(中国计量科学研究院) 邢波(中国计量科学研究院) 原遵东(中国计量科学研究院) 参加起草人: 吴一冈(广州飒特电力红外技术有限公司) 目录 1 范围 (1) 2 引用文献 (1) 3 术语和计量单位 (1) 3.1 术语 (1) 3.2 计量单位 (1) 4 概述 (1) 5 计量特性 (1) 5.1 外观 (1) 5.2 显示 (2) 5.3 示值误差 (2) 5.4 测温一致性 (2)
6 校准条件 (2) 6.1 环境条件 (2) 6.2 标准及其他设备 (2) 7 校准项目和校准方法 (3) 7.1 校准项目 (3) 7.2 校准方法 (3) 8 校准结果的表达 (5) 9 复校时间间隔 (6) 附录A 热像仪示值误差校准不确定度评定 (7) 附录B 校准结果记录格式 (9) 附录C 热像仪校准证书数据页格式 (10) 热像仪校准规范 1 范围 本规范适用于具有温度测量功能的热像仪在-20℃~2000℃范围内的校准。 2 引用文献 本规范引用下列文献: JJF 1001-2019 《通用计量术语及定义》 JJG 1007-2019 《温度计量名词术语及定义》 GB/T 19870-2019 《工业检测型红外热像仪》 JJF 1059-2019 《测量不确定度评定与表示》 使用本规范时,应注意使用上述引用文献的现行有效版本。 3 术语和计量单位 3.1 术语 3.1.1 GB/T 19870-2019《工业检测型红外热像仪》术语和定义适用于本规范。 3.1.2 示值误差 error of indication 热像仪的示值误差是热像仪的温度示值与被测黑体辐射源温度的约定真值之间的差。 3.2 计量单位 温度单位为摄氏度(℃)或开尔文(K) 4 概述 热像仪可以将物体表面热辐射转换成可见图像,并通过对发射率、反射率和透过率
FLIRA315红外热像仪中文说明书
FLIRA315红外热像仪使用说明书 代理商:武汉筑梦科技有限公司 2014-1-6
第一章设备简介 1 FLIR红外热像仪原理 1.1红外热像仪 从原理上讲,热像仪包括两部分:光学部件和探测器。光学部件使目标的红外辐射集中到探测器上,探测器对之成像。 1.1.1光学材料 红外辐射和可见光的性质一样能折射和反射。因而,红外热像仪的光学部件设计方法和普通相机的相似。用于普通相机的玻璃对红外线的透射程度不够好,因而不能用于红外热像仪。所以必须寻找别的材料。对红外线透明的材料一般对可见光不透明。象硅和锗就通常对可见光不透明。 从图中可以看出,这两种材料可以作为SW和LW光学材料。通常,硅用于SW系统而锗用于LW热像仪。硅和锗有好的机械性能,即不易破裂,它们不吸水,可以用现代车削法加工成镜头。 1.1.2探测器 对红外辐射敏感的元件称为探测器。这些年来,热像仪采用过许多不同类型的探测器。这些探测器不分类型都有一些典型特点。探测器对入射辐射的探测结果以电信号输出。这信号取决于入射红外辐射的强度与波长。大部分探测器都存在截止波长,这也很典型。如果入射辐射的波长长于探测器的截止波长,探测器将没有信号输出。在1997 年以前,所有的探测器都是制冷型的,根据不同型号,低的至少制冷到–70oC,更有甚者需制冷到–196oC。 1997 年,AGEMA 公司在世界上首先生产出了新一代非制冷微量热型探测器热像仪:Thermovision? 570,现在叫做AGEMA 570。500 系列的另一种热像仪叫做AGEMA 550,它使用制冷型探测器。
AGEMA 550 的探测器由斯特林制冷机制冷。这种PtSi探测器需制冷到–196oC。它需要两分钟来制冷。作为“单一”探测器的换代品,在1995年FPA 探测器被运用于所有的热像仪(AGEMA)上。AGEMA 550的探测器有320 x 240 = 76,800 探测器单元。 2 FLIR红外热像仪组成及接口 2.1、红外热像仪组成 红外热像仪组成:抗反射膜、光学滤片、探测器 2.2 使用说明 2.2.1 红外测温方法 红外热像仪是通过非接触探测红外能量(热量),并将其转换为电信号,进而在显示器上生
基于分段线性模型的卡尔曼滤波非均匀校正算法
第34卷增刊JOURNAL OF XIDIAN UNIVERSITY Vol.34 Sup. 基于分段线性模型的卡尔曼滤波 非均匀校正算法 秦翰林1,周慧鑫1,刘上乾1,简耀波23, (1. 西安电子科技大学 技术物理学院,陕西 西安 710071; 2. 华中科技大学 电子工程系,湖北 武汉 430074; 3. 深圳大学 工程技术学院,广东 深圳 518060) 摘要:为了降低探测器响应的漂移以及非线性对非均匀性校正的影响,提出了一种基于分段 线性模型的卡尔曼滤波红外焦平面阵列非均匀性校正算法。该算法引入探测器响应曲线的分 段线性模型,对基于卡尔曼滤波器的红外焦平面非均匀性校正算法进行了扩展和改进,不仅 能减小探测器的偏置和增益随时间漂移对校正的影响,而且还能消除探测器响应非线性对非 均匀性校正性能的影响。一组利用真实红外图像序列进行的实验验证了该算法可获得较好的 校正性能。 关键词:非均匀校正;卡尔曼滤波;非线性模型;红外焦平面阵列 中图分类号:TN21 文献标识码:A 文章编号:1001-2400(2007)S1-0168-05 Nonuniformity correction algorithm based on the Kalman-filter with a piecewise model for infrared image sequences QIN Han-lin1, ZHOU Hui-Xin1, LIU Shang-qian1, JIAN Yao-bo2,3 (1 School of Technical Physics, Xidian University, Xi'an 710071, China; 2 Institute of Optoelectronics Science and Engineering, HUST, Wu'han 430074, China; 3 School of Engineer and Technology, ShenZhen University, Shenzhen 518060, China) Abstract:To reduce the effect that the detector nonlinear response imposes on the nonuniformity correction, a nonuniformity correction algorithm based on the Kalman-filter with a piecewise model is presented. This paper introduces a piecewise linear model of a detector response curve. And the Kalman-filter based nonuniformity correction algorithm is improved, which adapts to infrared focal plane arrays with nonlinearity of the response characteristic. Compared with the original algorithm, it can solve not only the problems of detector offset and gain drift with time, but also the influence of the detector nonlinear response to the nonuniformity correction performance to some extent. Therefore it achieves a better effect of the nonuniformity correction than the original algorithm. The nonuniformity correction capability of the improved algorithm is validated with real infrared image sequences. Key word: nonuniformity correction; Kalman filter; nonlinear model; infrared focal plane arrays At present, the infrared imaging system is more and more utilized in military and civil applications. Over those available infrared imaging system, the infrared focal plane arrays (IRFPA) imaging system, which has many advantages, such as compact-structure and high-sensitivity, is paid more and more attention to. It is well known that response nonuniformity in IRFPA can markedly degrade the quality of infrared images. It results in a fixed pattern noise superimposed on the true image, and this deteriorates the temperature and spatial resolutions of the IRFPA imaging systems seriously. So a corresponding nonuniformity correction (NUC) technology must be employed in nearly all IRFPA imaging systems applied for engineering[1,2] . Since the 1980’s, numerous nonuniformity correction techniques have been developed, which can fall into two main types. In the first type of NUC algorithm, such as two-point or multi-point correction techniques [1-3], the known blackbody calibration-source is necessary. Although these techniques have a high correcting accuracy, they can not effectively eliminate the drift of IRFPA’s response[1-3]. The other group of NUC techniques is scene-based algorithms which rely on signal processing to remove the nonuniformity noise, such as constant-statistical algorithm[4], neural-network algorithm[5], temporal high-pass filter technique[6], Kalman filter algorithm[7,8], etc. Scene-based NUC techniques are more desirable than the traditional calibration-based NUC techniques in many IRFPA imaging applications since they do not require a blackbody calibration-source and do not interrupt the normal operation of the IRFPA camera. In recent years, special attention has been paid to developing scene-based techniques —————————————— 投稿日期:2007-06-09 基金项目:国家自然科学基金资助项目(60377034) 作者简介:秦翰林(1982-),男,西安电子科技大学博士研究生
测量铁水流温度的红外热像仪标定方法
?测量铁水流温度的红外热像仪标定方法 ?红外设备将校准为使用斯特藩-玻尔兹曼公式计算基于从黑体发出的红外辐射温度。这里的Wbb是一个黑体单位时间内表面的总辐射能量单位,σ是一个常数,T是Kelvin 开尔文温度 W BB = σ · T 4. (3) 然而,在相同温度下,真正的人体发出的辐射比黑体少,描述这现象的术语发射率被正式定义为:在相同温度下,身体发出的辐射与黑体发出的辐射比例。 ?把3带入4 得出5 这个方程是灰体散热器的斯蒂芬-波尔兹曼公式 W = ε· σ · T 4. (5) 补偿是一个计算过程,是使用其主体发射率发出的辐射来计算主体温度的过程,基于此过程,红外设备可用(6)来测量辐射和计算温度。可以看出,最终红外设备测量精度取决于正确的调整发射率,因此,发射率校准至关重要。 ?铁水发射率 在工业环境中,由于种种原因准确的发射率校准不太容易。最重要的原因之一是正确的发射率 评估必须在同样条件下随着温度测量进行,这是非常困难的,因为发射率评估所需的参考温度通常不适用于工业安装的环境。 在实际工作条件下,一般的程序进行校准发射率是非常困难的,这就是为什么发射率通常在实验室中运用校准设备加热对象并测定其温度进行评估。虽然温度低但热电偶也可用来获得参考温度, 更常见的是使用在温度测量中使用的红外设备,粘一块已知发射率的绝缘胶带在样品上。一旦获知 被加热物体的参考温度,就使用红外设备再次测量样品,发射率的结构会不断变化直到获得参考温度,这最终的构成就是被测物的发射率。
本文提出了一种在实际工作环境中的铁水发射率校准。在实验室,可以模拟相同条件的铁水。然而,这些类型的综合测试很少是模拟真的现实生活中的数据。 T 铁水发射率的参考温度是通过一个配有热电偶的管子,lance浸在鱼雷车内的铁水中几次,采取平均测量,这种温度测量的过程非常危险必须谨慎小心,因为它需要人工直接近距离干预非常热的材料,不管怎样,实际工作中它是唯一可选的。为了减少对人们造成的伤害,因此将移动并把测量器具浸入鱼雷车的操作员位置设在鱼雷车上方的安全距离,当倾倒铁水时不能浸入测量器,以免有飞溅物质。图8显示一名操作员正在使用测量器测温。 为发射率校准使用热电偶测温 使用lance测温后,立刻把鱼雷车中的铁水倒入钢包,使用本文中提到的铁水测量方法,铁水倾倒时红外摄像机中的发射率不断变化直到温度分布的平均值匹配之前用lance测的温度。红外摄像机测量的温度对于用lance测的温度有一个延迟,于是铁水的温度在这期间可能发生变化。 然而,绝缘的鱼雷车和热惯性使这种差异可以忽略不计。 重复测试鱼雷车发射率校准待得到相近的结果时,经过计算得到的最终发射率是0.205.这个值和之前工作的长波红外设备Flir ThermoVision A325所得值是一致的。作为一个红外测温感兴趣的技术人员的参考,工厂加工的生铁含碳量较高 (4.636%),也含有小比例的其他物质,包括硅(0.396%),锰 (0.319%),磷 (0.070%),硫 (0.008%).发射率校准实验的环境为相对湿度60%,常温23 ? C,摄像机到目标距离为7米。 B.熔渣界定 为了正确计算熔渣的温度T S,(7)应该用于补偿熔渣W S的发射率εS发出的辐射.
红外热像仪和视频报警系统在安防领域的应用讲解
红外热像仪和视频报警系统在安防领域 的应用 一、系统概述随着技术进步,视频监控系统已经在国家公共安全防范的各个领域中开始了广泛使用,这使得人民的安全环境在很大程度上得到了提高。现在的视频监控系统主要采用的是可见光摄像机和人工监视、录像相结合的方式进行日常的安全防护。但由于可见光摄像机在恶劣天气或照度较低的条件下,很难滤除干扰得到有用的视频图像,因此使得整个安全防范系统在夜间或恶劣天气条件下的防范能力大打折扣。而且现在的视频监控系统必须由安保 一、系统概述 随着技术进步,视频监控系统已经在国家公共安全防范的各个领域中开始了广泛使用,这使得人民的安全环境在很大程度上得到了提高。现在的视频监控系统主要采用的是可见光摄像机和人工监视、录像相结合的方式进行日常的安全防护。但由于可见光摄像机在恶劣天气或照度较低的条件下,很难滤除干扰得到有用的视频图像,因此使得整个安全防范系统在夜间或恶劣天气条件下的防范能力大打折扣。而且现在的视频监控系统必须由安保人员对视频画面进行24小时不间断的监视、人为对视频图像进行分析报警,否则系统就起不到实时报警的功能只能起到事发后取证的作用。因此整体来说,现在的视频监控系统还处于在半天时、半天候和半自动状态。因此如何提高在“夜黑风高”的案件高发时间段的自动报警防范能力,就成为了国家公共安全防范领域内急需解决的重要问题之一。 红外热像仪及视频报警系统,是基于非制冷红外热像仪或可见光摄像机等硬件系统,采用红外/可见光复合成像、视频图像处理及自动行为分析报警等相关软件与之结合,将现有视频监控系统的良好天气下的人工监视、事后取证功能,提升为全天候条件下的免人为看护、电脑自动实时报警功能。系统可在夜间或者恶劣天气条件下(如大雨、大雾等)工作,不仅能节省大量的人力,同时可实现全天时全天候实时报警。不仅弥补了现有视频监控系统的不足,而且提升了安防系统的自动识别、自动报警等相关自动化程度,具有非常重要的社会作用,具有广阔的市场。 1、非制冷红外热像仪硬件系统
FLIR T330红外热像仪参考资料
FLIR T330红外热像仪采用最新的高灵敏度探测器:热灵敏度高达0.06℃。电力设备当内部受潮、损伤、缺陷或放电时,在瓷套外壳反映出的温差很小,只有热灵敏度极高的FLIR T330红外热像仪才能反映出这些温度的变化,查出其内部故障。 1. FLIR T330红外热像仪极高的热灵敏度:极高的热灵敏度结合FLIR 先进的成像和光电子技术,不仅能提供清晰、无噪声的优质红外图像,而且能反映细极小的温度变化,从而精确的进行温度测量,并能使我们更容易发现一些温差很小、隐蔽性很强的内部故障。 2. FLIR T330热像仪适合远距离检测的高空间分辨率:FLIR T330红外热像仪具有适合远距离检测的高空间分辨率。空间分辨率和热灵敏度这两参数的结合,能清晰准确测量出远距离的物体的温度,如高压线路的导线、压接套管、绝缘子、标准线夹等。在保证准确测温、清晰成像的前提下,测试距离可大于40m。 3. 稳定成熟的内部校正系统:FLIR T330红外热像仪在出厂前都会经过黑体校准系统进行温度标定(见下图),并且每台仪器内部都有一套FLIR独特的校正系统,它是由一套数学模型、内置黑体和5个高精度和高灵敏度的传感器组成,能自动的根据距离、大气温度、湿度、仪器内部温度的变化、辐射率、反射温度等,对测试数据进行校正,始终保持仪器内部恒温。所以FLIR T330红外热像仪在使用若干年之后仍然能保持精度、灵敏度不变,图像清晰,重复率好,温度漂移很小。 4. 高品质可视热像仪:FLIR T330热像仪集成有一个130 万像素数码相机。它可用于更快更便捷地进行观察和检测,并在必要时创建热图像叠加和画中画图像。 5. MPEG-4 视频:您可使用FLIR T-330热像仪创建可视及红外非辐射MPEG -4视频文件 6. 独特的图像融合功能:FLIR T330红外热像仪的热图像叠加功能,可叠加可见光和红外图像,以便更为便捷的识别和分析红外图像。此外,还可定义是否显示预定温度阈值或温度间隔上下的区域。 7. 画中画功能:FLIR T330红外热像仪在可视图像上创建一个红外叠加图像。可缩放、移动及调节图像大小。该功能用于定位并清楚显示危险区域的红外图像。 8. 坚固耐用符合人体工程学的外壳设计:FLIR T330红外热像仪的采用人体工程学和防水防尘设计;镜头内置,装长焦镜头时无需拆除原镜头。封装符合欧洲标准。是它能够在恶劣的现场环境(雨天、沙尘天气)下工作,坚固、轻便、实用, 主机重量仅为0.88公斤。 9. 触摸屏:FLIR T330热像仪: 配置3.5”LCD 可触屏外加触控笔,为用户带来全新的操作互动性及舒适体验,用户直接在屏幕上添加缩略图和图形标记。 10. 简单的操作方式适合各种场合:T-330配有高分辨率的TFT取景器、几个按键快速完成测试。通过四个快速按键,可以方便的完成仪器参数设置、改变调色板、设置发射率和测温范围、开启分析软件,如点测温、颜色报警等。无论现场情况如何复杂,都能够实现简单操作。每一个控制按钮设计合理,易于操作。
红外热像仪使用说明书
红外热像仪使用说明书 在红外热像仪的使用说明书中,以下的指标值得关注: 除了从典型应用的角度之外,还可以快速地从回答3个简单问题,来进行红外热像仪关键指标的选择: 问题一:红外热像仪到底能测多远? 红外热像仪的检测距离= 被测目标尺寸÷IFOV,所以空间分辨率(IFOV)越小,可以测得越远。例如:输电线路的线夹尺寸一般为50mm,若使用Fluke Ti25 热像仪,其IFOV为2.5mRad ,则最远检测距离为50÷2.5=20m 问题二:红外热像仪能测多小的目标? 最小检测目标尺寸= IFOV×最小聚焦距离。所以IFOV越小,最小聚焦距离越小,则可检测到越小的目标。举例: 某品牌热像仪Fluke Ti25 热像仪 空间分辨率(IFOV):2.6mRad 空间分辨率(IFOV):2.5mRad 像素:320×240 像素:160×120 最小聚焦距离:0.5m 最小聚焦距离:0.15m 最小检测尺寸:1.3 mm 最小检测尺寸:0.38 mm 从对比图看,右侧Fluke Ti25,虽像素稍低,但凭借更小的IFOV 及最小聚焦距离优势,实际可以拍摄到0.38mm微小目标,而另一品牌则只能测到1.3mm 的目标。 问题三:热像仪能看得多清晰? 因素一:热灵敏度决定热像仪区分细微温差的能力。同样状况下,右图所用热像仪的热灵敏度更低,画面清晰显示花蕊细节的温度分布,而左图同区域只能看到一片红色。
因素二:最小检测尺寸决定了热像仪捕捉细小尺寸的能力。尺寸越小,相同面积的检测目标画面由更多像素组成,画面更清晰。 由右图可见,像素(马赛克)越小越清晰 什么是空间分辨率(IFOV)? 在单位测试距离下,红外热像仪每个像素能够检测的最小目标( 面积),以mRad 为单位,是一个主要由像素和所选镜头角度所决定的综合性能参数,是热像仪处理空间细节能力的技术指标。 为什么空间分辨率(IFOV)越小越好? 单位距离相同时,IFOV 越小,单个像素所能检测的面积越小,单位测量面积上由更多的像素所组成,图像呈现的细节越多,成像越清晰。
非均匀性矫正
一、图像的非均匀性矫正
二、图像增强
三、程序代码(MATLAB)%%%%%%%%%%%%%%%%%%%%555555555555555555555555555555555一点矫正HIGH_T=fopen('highdat_151.dat','rb'); HIGH=fread(HIGH_T,[200,200],'uint8'); HIGH=uint8(HIGH); %类型转化为uint8 subplot(321);imshow(HIGH); title('原始高温图像'); subplot(322);mesh(double(HIGH));title('原始高温图像三维显示'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% LOW_T=fopen('lowdat_151.dat','rb'); LOW=fread(LOW_T,[200,200],'uint8'); LOW=uint8(LOW); subplot(323);imshow(LOW); title('原始低温图像'); subplot(324);mesh(double(LOW)); title('原始低温图像三维显示'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% HAND_D=fopen('handdat_60.dat','rb'); HAND=fread(HAND_D,[200,200],'uint8'); HAND=uint8(HAND); subplot(325),imshow(HAND); title('原始手形图像'); subplot(326),mesh(double(HAND)); title('原始手形图像三维显示'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%选取低温图进行定标 S=mean2(LOW(:)); % S为定标值 S_LOW=S*ones(200,200); S_LOW=uint8(S_LOW); %S_LOW为定标矩阵 D_LOW=LOW-S_LOW; %校正系数D_LOW figure; HIGH_L=HIGH-D_LOW; subplot(321);imshow(HIGH_L); title('经低温矫正后的高温图像'); subplot(322);mesh(double(HIGH_L)); title('经低温矫正后的高温图像三维显示'); LOW_L=S_LOW; subplot(323);imshow(LOW_L); title('经低温矫正后的低温图像'); subplot(324);mesh(double(LOW_L)); title('经低温矫正后的低温图像三维显示'); HAND_L=HAND-D_LOW; subplot(325);imshow(HAND_L); title('经低温矫正后的原始手图像'); subplot(326);mesh(double(HAND_L)); title('经低温矫正后的原始手图像三维显示'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%选取高温图进行定标 S=mean2(HIGH(:)); % S为定标值 S_HIGH=S*ones(200,200); S_HIGH=uint8(S_HIGH); %S_LOW为定标矩阵 D_HIGH=HIGH-S_HIGH; %校正系数D_HIGH figure; HIGH_H=S_HIGH; subplot(321);imshow(HIGH_H); title('经高温矫正后的高温图像');
浅析红外热像仪的精度与不确定性概念 菲力尔FLIR
热像仪精度规格与不确定性方程式 你可能会注意到,大多数红外热像仪的数据规格手册上的精度规格会显 示为±2 ?C或读数的2%。这一规格数 据是基于广泛采用的名为“平方和根值”(RSS)不确定性分析技术结果。它的概念是一个计算温度测量公式每个变量的局部误差值,取每个误差项的平方,然后将其全部相加,最后取其平方根值。虽然这个公式听起来复杂,但其实很简单。从另一方面来讲,局部误差值的确定可能会很难。 “局部误差”来自于典型红外热像仪温度测量公式中多个变量中的一个,包括: ? 发射率 ? 反射的环境温度 ? 透过率大气温度? 热像仪的响应值 ? 校准器(黑体)的温度精度 一旦确定上述各个值的“局部误差”响应值,那么整个误差公式就是: 总误差 = √?T12+?T22+?T32 …以此类推其中,?T1、?T2、?T3...是测温公式中变量的局部误差值。 那为何公式是这样的?事实证明,随机的误差值有时是在同一个方向上相加,使你离正确值的偏差越来越远;有时,误差值又是在相反方向上相加,相互抵消。所以,采用“平方和根植”是计算总误差值最适合的方法,并一直作为FLIR红外热像仪数据规格表上的显示数据。 些数据,而红外热像仪常常会被归到这一测量仪器的类别之中。而且,在讨论红 外热像仪的测量精度时,常常会用到一些令人困惑不已、产生误解的复杂术语和 行话。最终使一些研究人员完全对这些工具绕行而走。不过也因此,他们会与其 在研发热测量应用所具有的潜在优势失之交臂。在下面的讨论中,我们会避免使 用技术术语,以直白的语言阐述红外热像仪在测温上的不确定性,让你对此有基 本的了解,从而帮助你理解红外热像仪标定流程和精度。 图1 – 位于美国佛罗里达州尼斯维尔的FLIR温度记录校 准实验室 这里需要说明的是,目前所讨论的计 算值有效的条件是只有当热像仪用于 实验室或户外短距离范围(20米以内)。 由于大气吸收因素,还有影响程度较 小的发射率因素,距离变长会增加测 量值的不确定性。当红外热像仪的研 发工程师在实验室条件下对大部分现 代的红外热像仪系统采用“平方和根 值”的分析方法时,所得结果近似为 ±2 ?C或2% — 因此成为热像仪规格参 数中使用的合理精度率。但是,实践 表明,诸如FLIR X6900sc的高性能的热 像仪比FLIR E40的经济型热像仪的精度 效果要好,因此,我们仍需要做些工 作来更好地解释这一观察结果。 技术说明
红外热像仪操作步骤(精)
红外热像仪操作步骤 第一、连接设备,该仪器主要的部件有MAG30系列在线式热像仪(包括镜头)1台,12V电源适配器一个,网线一条(普通网线即可),IO接线端子,安装盘(光盘内附带用户手册)。使用时,将热像仪固定在三角支架上,连接处有螺丝固定,旋紧即可;将电源线插入12V DC 电源接口,此时电源指示灯亮;将网线插入电脑的网线接口(即RJ45网口)和热像仪的RJ445网口,若连接通路,则网口的黄色指示灯变亮,若不通则检查网线等方面。 第二、我们目前使用的是将热像仪与电脑直接通过网线相连,该情况下需要对电脑的ip地址进行修改,xp系统与win7系统修改ip的方法稍有差异,对于xp系统,可右键点击网上邻居—选择属性—本地连接—右键—属性—双击 tcp/ip协议—使用下面的ip地址,进行修改即可,若为win7系统,则右键点 击网上邻居—选择属性----点击本地连接—属性—双击 internet 协议版本4--—使用下面的ip地址,修改即可,Ip地址为 192.168.1.2—192.168.1.250之间均可,子网掩码255.255.255.0,网关192.168.1.1,即可完成连接。 第三、打开电脑上的软件ThermoX.exe(红外热像仪),,由于是网线直接连接在软件界面右侧的启用DHCP Server打钩
,打钩后,MAG30-110257即为该设备的型号,此时连接完毕。 第四、点击软件主界面右下方的黑色三角即可开始进行红外录制,然后要进行对焦,使出现的画面更加清晰,点击对焦按钮 完成自动对焦。 第五、该设备可以进行图片和视频以及带温度等详细信息的视频文件,根据需要进行保存,也可直接存储为温度流,方便以后进行相关分析。 ,左键点击存温度流按钮,出现保存路径对话框,设置其保存路径。待完成需要的测量后,点击上图黑色方框停止记录,此时完成实验过程。 第六、对实验保存的温度流进行回放,首先断开热像仪,点击下图中的断开按钮,然后点击主界面上方菜单的回放下拉菜 单,,选择打开文件,寻找保存的.mgs为文件后缀名的文件,可通过回放菜单中的回放控制进行一些相应的设置(如选择循环播放等)。
红外图像非均匀性校正及增强算法研究
红外图像非均匀性校正及增强算法研究 受限于制造工艺的约束,红外焦平面中各探测像元的光电响应率不一致,即存在非均匀性问题,导致图像中出现固定样式噪声,且具有缓慢的时间漂移性。并且,红外探测器的光电响应动态范围较大,而单幅图像场景的温度范围通常在红外探测器总体动态范围中占比小,导致原始红外图像对比度低、物体边界模糊。 因此,非均匀性校正和图像增强是必不可少的红外图像预处理步骤。本文将围绕基于场景的非均匀性校正和红外图像增强技术展开研究,论文的主要研究内容如下:1.凝视型红外探测器中,传统的基于神经网络的非均匀性校正方法通常假设固定样式噪声满足独立同分布,但在低成本非制冷探测器中,非均匀性的条纹噪声强,噪声分布特性不满足假设,导致现有方法难以兼顾边缘保护与条纹噪声抑制。 针对该问题,本文提出了基于自适应稀疏表示以及局部全局联合约束学习率的非均匀性校正方法,引入稀疏表示理论,利用干净的红外图像集训练出的过完备字典中的原子可稀疏地表示图像场景信息的特性,在自适应的误差容限内重建图像,从而保护图像边缘、将噪声成分当作冗余去除。实验结果表明,在均方根误差指标上,本方法相比传统方法降低了1.1652至1.9107不等、降低了约17.92%至26.37%,能够在保护图像边缘的同时有效去除包括条纹噪声在内的固定样式噪声。 2.扫描型红外探测器中,若直接采用凝视型探测器的非均匀性校正方法,则仍需数百帧图像计算校正系数,算法收敛慢。传统的扫描型探测器校正方法利用扫描成像的特性逐列(假设沿行扫描)更新校正系数,在单帧图像内完成校正。 然而,单帧图像内场景辐射多样性通常有限,导致传统方法易陷入局部最优
TiS系列红外热像仪使用说明书
TiS10, TiS20, TiS40, TiS45, TiS50, TiS55, TiS60, TiS65 Performance Series Thermal Imagers 用户手册July 2015 (Simplified Chinese) ? 2015 Fluke Corporation. All rights reserved. Specifications are subject to change without notice. All product names are trademarks of their respective companies.
有限保证和责任限制 在正常使用和维护条件下,Fluke 公司保证每一个产品都没有材料缺陷和制造工艺问题。保证期为从产品发货之日起二(2)年。部件、产品修理和服务的保证期限为 90 天。本项保证仅向授权零售商的原始买方或最终用户提供,并且不适用于保险丝和一次性电池或者任何被 Fluk e 公司认定由于误用、改变、疏忽、意外非正常操作和使用所造成的产品损坏。Fluke 公司保证软件能够在完全符合性能指标的条件下至少操作 90 天,而且软件是正确地记录在无缺陷的媒体上。Fluke 公司并不保证软件没有错误或无操作中断。 Fluke 公司仅授权零售商为最终客户提供新产品或未使用过产品的保证。但并未授权他们代表 Fluke 公司提供范围更广或内容不同的保证。只有通过 Fluke 授权 的销售商购买的产品,或者买方已经按适当的国际价格付款的产品,才能享受 Fluke 的保证支持。在一个国家购买的产品被送往另一个国家维修时,Fluke 公 司保留向买方收取修理/更换零部件的进口费用的权利。 Fluke 公司的保证责任是有限的,Fluke 公司可以选择是否将依购买价退款、免费维修或更换在保证期内退回到 Fluke 公司委托服务中心的有缺陷产品。 要求保修服务时,请与就近的 Fluke 授权服务中心联系,获得退还授权信息;然后将产品连同问题描述寄至该服务中心,并预付邮资和保险费用(目的地离岸价格)。Fluke 对运送途中发生的损坏不承担责任。在保修之后,产品将被寄回给买方并提前支付运输费(目的地交货)。如果 Fluke 认定产品故障是由于疏忽、误用、污染、修改、意外或不当操作或处理状况而产生,包括未在产品规定的额定值下使用引起的过压故障;或是由于机件日常使用损耗,则 Fluke 会估算修理费用,在获得买方同意后再进行修理。在修理之后,产品将被寄回给买方并预付运输费;买方将收到修理和返程运输费用(寄发地交货)的帐单。 本保证为买方唯一能获得的全部赔偿内容,并且取代所有其它明示或隐含的保证,包括但不限于适销性或适用于特殊目的的任何隐含保证。F LUKE 对任何特殊、间接、偶发或后续的损坏或损失概不负责,包括由于任何原因或推理引起的数据丢失。 由于某些国家或州不允许对隐含保证的期限加以限制、或者排除和限制意外或后续损坏本保证的限制和排除责任条款可能并不对每一个买方都适用。如果本保证的某些条款被法院或其它具有适当管辖权的裁决机构判定为无效或不可执行,则此类判决将不影响任何其它条款的有效性或可执行性。