板球系统实验指导书 MA AB
球杆系统实验指导书 (1)
球杆系统GBB1004实验指导书V2..0一、系统建模1.球杆系统的机械模型:球杆系统机械结构原理图如图1-1:图1-1 球杆系统机械结构连线(连杆和同步带轮的连接点与齿轮中心的连线)和水平线的夹角为θ(θ的角度存在一定的限制,在最小和最大的范围之间),它作为连杆的输入,横杆的倾斜角α和θ之间的有如下的数学关系:角度θ和电机轴之间存在一个减速比n=4的同步带,控制器设计的任务是通过调整齿轮的角度θ,使得小球在某一位置平衡。
小球在横杆上滚动的加速度如下式:其中:小球在横杆上的位置r为输出小球的质量m = 0.11公斤;2 2 小球的半径R = 0.015米; 重力加速度g = -9.8米/秒2; 横杆长L = 0.4米; 连杆和齿轮的连接点与齿轮中心的距离为d = 0.04米;小球的转动惯量J = 2*m*R^2/5牛顿.秒2。
我们假设小球在横杆上的运动为滚动,且摩擦力可以忽略不计。
因为我们期望角度α在0附近,因此我们可以在0附近对其进行线性化,得到近 似的线性方程:拉氏变换得: r (s ) = mgd ⋅ 1 = 0.7 θ (s ) L ( J + m ) s s R 21.2 在Simulink 中建立球杆系统的模型 我们将直接建模运动学的非线性方程,系统方程包含r, d/dt(r), alpha, and d/dt(alpha),我们将使用非线性函数模块来描述这些函数,首先,我们要描述系统 的输出r 。
• 在Simulink 中打开一个新的模型。
• 从线性模块库中插入一个积分模块。
• 在上面的积分模块右边再添加一个积分模块,并把两个模块连接起来。
• 在连接线上加上"d/dt(r)"的注释,在连接线的附近双击就可以添加文字。
• 从第二个积分模块的输出端画一条线,并标识为"r"• 从Connections 模块库中插入一个Out 模块并和"r"信号线连接。
基于STM32单片机板球控制系统的设计与实现

基于STM32单片机板球控制系统的设计与实现作者:魏敏张华正胡红新来源:《科学与财富》2018年第24期摘要:本文研究了一种基于STM32单片机的板球控制系统。
文章详细阐述了本系统的工作流程,硬件设计,软件编程和测试结果分析。
本系统采用了一块STM32f103微处理器作为主控芯片,通过串口通讯控制STM32f407微处理器对摄像头采集图像进行图像处理。
STM32f407将处理结果发送给主控芯片。
主控芯片通过PID算法计算控制量,输出PWM波控制两舵机。
舵机通过拉杆调节平板倾斜度,控制小球在平面上的运动。
经验证,本系统控制效果良好。
关键词:STM32单片机;图像处理;PID;舵机1系统方案1.1系统结构本系统主要由STM32F103控制核器、电机控制模块、按键模块、电源模块、液晶显示模块和图像处理等单元模块构成。
小球选用的是直径2.0cm的钢球,通过舵机带动平板上下运动,使得小球在平板上滚动,通过摄像头对小球位置进行检测,用STM32F407图像处理后的图像通过液晶显示屏显示,之后用PID算法精确调节舵机,使小球完成各项指标。
系统框图如下:1.2各部分方案选择与论证1.2.1机械结构方案选择与论证方案一:利用手头仅有的万向节与双舵机,将万向节固定在板子中下方,两个舵机分别放在相邻两边的中线处,成90度角,摄像头固定在距离平板大约80cm处,尽量还原经典板球结构,同时焊接相应配套铁架台来固定摄像头和单片机等器件。
方案二:采用悬挂式,将三个步进电机分别固定在所选铁架的三个角上,步进电机通过鱼线与对应木板角相连,木板最后一角处直接用线固定,通过三个步进电机的转动来控制与平板相连的线的伸缩从而控制平板的平衡,进而维持小球的正常运动。
方案二通过悬挂的方式致使平板很不稳,本身就存在抖动现象,受外界因素影响太大,自身缺陷太多,并且三个电机分布不均匀,使难度加大;由于最初我们采用的是方案二,实验结果并不理想,因此我们最终采用方案一,并取得理想结果。
板球系统平台设计方案研究

第20卷第4期2020年12月Vol.20No.4Dec.2020应用技术学报JOURNAL OF TECHNOLOGY文章编号:2096-3424(2020)04-0343-07DOI:10.3969/j.issn.2096-3424.2020.04.007板球系统平台设计方案研究陈芷琳,温晓静,刘鑫,王翔,丁肇红(上海应用技术大学电气与电子工程学院,上海201418)摘要:板球系统是一个非常经典的自动控制原理实验平台,其本身也是一个集合机械、电子、自动化以及计算机科学等各个学科的综合系统。
设计了搭建一整套完整的板球系统平台的方案,包括机械结构设计,硬件电路设计,嵌入式软件设计以及上位机设计,最后通过做出的实物平台验证了方案的可行性。
实验结果表明,该板球系统平台设计方案有较高的实用价值,制造成本低,同时该研究所设计的方案也为其他自动控制实验仪器设计提供了解决思路和方案,有较高的应用和推广价值。
关键词:板球系统;硬件设计;软件设计;系统集成中图分类号:TP23文献标志码:AResearch on Design Scheme of Ball and Plate SystemCHEN Zhilin,WEN Xiaojing,LIU Xin,WANG Xiang,DING Zhaohong(School of Electrical and Electronic Engineering,Shanghai Institute ofTechnology,Shanghai201418,China)Abstract:The ball and plate system is a very classic experimental platform for automatic control principles. It is also a comprehensive system that integrates various disciplines such as machinery,electronics, automation and computer science.This paper has proposed a solution to build a complete set of ball and plate system platforms,including mechanical structure design,hardware circuit design,embedded software design and host computer design,finally,the feasibility of the program was verified by the physical platform made・The experimental results show that the design scheme of the ball and plate system platform has high practical value and low manufacturing cost.At the same time,this scheme also provides solutions and solutions for the design of other automatic control experimental instruments.Key words:ball and plate;hardware design;software design;system integration自从20世纪80年代末板球系统开始被国内外学者当作研究对象来验证各种控制算法,板球系统的研究已经经历了从simulink模型仿真验证到实物平台实时控制的过渡卩幻,陆续有各个课题组实验室以及企业生产制造出各类板球系统实物平台,其中国内比较常用的是由固高科技公司生产的GPB2001板球系统,其平台实物和上位机界面如图1所示。
板球系统实验指导书(MATLAB)

Reinovo
实验指导书
自动控制类使用板球系统的定位控制 Nhomakorabea轨迹跟踪
实验指导书
第一部分
深圳市元创兴科技有限公司 2010年12月22日
深圳市元创兴科技有限公司
实验指导书
第一章 实验使用仪器及其连接方式..................................................................................... 1 第二章 系统控制原理简介..................................................................................................... 2 第三章 实验............................................................................................................................. 3
二 试验系统 板球系统实验总体结构如图 1.1 所示
图 1.1 板球实验系统总体结构图 本实验系统的主体包括板球、伺服驱动器、数据采集卡、直流伺服电机等。主体、 驱动器、直流伺服电机、电源和数据采集卡都置于实验箱内,实验箱通过两条 USB 数据 线与上位机进行数据交换,另有一条线接 220V 交流电源。
实验一 运动控制基础实验.................................................................................................................... 3 实验二 板球系统调平板水平实验........................................................................................................ 8 实验三 板球系统建模、仿真及实验.................................................................................................. 10 实验四 状态空间极点配置控制实验.................................................................................................. 19 实验五 线性二次最优控制 LQR 控制实验..........................................................................................33 实验六 模糊控制实验.......................................................................................................................... 40 实验七 变论域模糊控制实验.............................................................................................................. 47
《MATLAB应用技术》实验指导书
MATLAB实验指导书电子信息工程学院2012.02目录实验一MATLAB安装与界面 (1)实验二MATLAB符号计算与应用 (2)实验三MATLAB数值数组与向量化运算 (4)实验四MATLAB数值计算 (7)实验五MATLAB可视化 (10)实验六M文件及MATLAB综合应用 (15)实验一Matlab安装与界面【实验目的】【实验原理】1. 安装MATALB软件,并按理论教学内容逐一熟悉软件界面及软件特点。
【实验仪器】1.配置在PIV2.0GHZ/512MB以上的PC机;2. MATALB7.0以上版本软件。
【实验内容及步骤】1. 完成MATLAB软件安装;2.熟悉MATLAB运行环境。
(1)命令窗口的使用。
(2)工作空间窗口的使用。
(3)工作目录、搜索路径的设置。
(4)命令历史记录窗口的使用。
(5)了解各菜单的功能。
3. 图示复数iziz21,3421+=+=的和展示MATLAB的可视化能力;4. 画出衰减振荡曲线teyt3sin3-=,的取值范围是]4,0[π;展示数组运算的优点及MATLAB的可视化能力。
5. 创建一个M文件,输入步骤4的相关程序,运行程序并变换名称保存,将工作空间中的y变量的MAT文件变换路径输出保存,然后再向内存装载MAT文件。
6. 以命令窗口中输入help Laplace、help浏览器中搜索两种方式体会MATLAB帮助系统的特点和功能。
【实验报告要求】1.整理实验结果。
2.总结实验心得体会实验二 Matlab 符号计算与应用【实验目的】1. 掌握MATLAB 符号计算的基本语法规则2. 掌握MATLAB 符号计算求解微积分、线性代数问题3. 熟悉MATLAB 符号计算在信号处理领域的应用【实验原理】1. 以MATALB 与MuPAD 库函数间符号计算机理和基本的微积分运算原理为基础,研究常见的工程定解问题以及连续信号处理问题。
【实验仪器】1.配置在PIV2.0GHZ/512MB 以上的PC 机; 2. MATALB7.0以上版本软件。
球杆系统稳定性分析实习报告

球杆系统稳定性分析实习报告实验地点:自动化专业实验室实验日期:2013-7.8—小组成员:指导教师:目录一、球杆系统简述二、球杆系统数学模型三、球杆系统在Simulink 下的模型建立四、控制器设计和仿真1.P控制2.PD控制3.PID控制4.根轨迹控制5.频率响应法控制一、系统简述球杆系统(Ball & Beam )是为自动控制原理等基础控制课程的教学实验而设计的实验设备。
该系统涵盖了许多经典的和现代的设计方法。
这个系统有一个非常重要的性质——它是开环不稳定的。
不稳定系统的控制问题成了大多数控制系统需要克服的难点,有必要在实验室中研究。
但是由于绝大多数的不稳定控制系统都是非常危险的,因此成了实验室研究的主要障碍。
而球杆系统就是解决这种矛盾的最好的实验工具,它简单、安全并且具备了一个非稳定系统所具有的重要的动态特性。
整个装置由球杆执行系统、控制器和直流电源等部分组成。
该系统对控制系统设计来说是一种理想的实验模型。
正是由于系统的结构相对简单,因此比较容易理解该模型的控制过程。
球杆执行系统(如图1 所示)由一根V 型轨道和一个不锈钢球组成。
V 型槽轨道一侧为不锈钢杆,另一侧为直线位移电阻器。
当球在轨道上滚动时,通过测量不锈钢杆上输出电压可测得球在轨道上的位置。
V 型槽轨道的一端固定,而另一端则由直流电机(DC motor )的经过两级齿轮减速,再通过固定在大齿轮上的连杆带动进行上下往复运动。
V 型槽轨道与水平线的夹角可通过测量大齿轮转动角度和简单的几何计算获得。
这样,通过设计一个反馈控制系统调节直流电机的转动,就可以控制小球在轨道上的位置。
GBB1004 型球杆系统由三大部分组成:IPM100 智能驱动器、球杆装置和控制计算机。
图1 球杆系统执行机构原理图在一长约0.4 米的轨道上放置一不锈钢球,轨道的一侧为不锈钢杆,另一侧为直线位移传感器,当球在轨道上滚动时,通过测量不锈钢杆上输出的电压信号可获得球在轨道上的位置x 。
板球系统文档
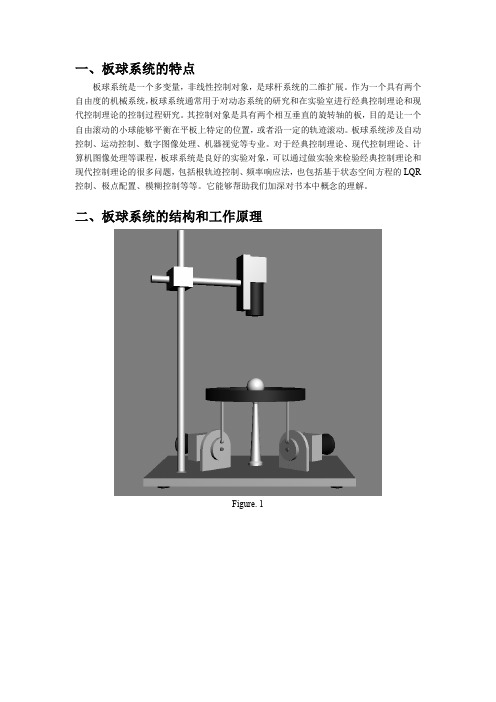
板球系统是一个多变量,非线性控制对象,是球杆系统的二维扩展。作为一个具有两个 自由度的机械系统, 板球系统通常用于对动态系统的研究和在实验室进行经典控制理论和现 代控制理论的控制过程研究。 其控制对象是具有两个相互垂直的旋转轴的板, 目的是让一个 自由滚动的小球能够平衡在平板上特定的位置, 或者沿一定的轨迹滚动。 板球系统涉及自动 控制、运动控制、数字图像处理、机器视觉等专业。对于经典控制理论、现代控制理论、计 算机图像处理等课程, 板球系统是良好的实验对象, 可以通过做实验来检验经典控制理论和 现代控制理论的很多问题, 包括根轨迹控制、 频率响应法, 也包括基于状态空间方程的 LQR 控制、极点配置、模糊控制等等。它能够帮助我们加深对书本中概念的理解。
1
0 mg 0 Jb m r2 b 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 1
0 0 0 0
0 mg 0 0 0 Jb m r2 b 0 0 0 0 0 0 0 0
四、演示算法:LQR 控制方法
在 Command Window 中输入 A=[0 1 0 0 0 0 0 0;0 0 -7 0 0 0 0 0;0 0 0 1 0 0 0 0;0 0 0 0 0 0 0 0;0 0 0 0 0 1 0 0 ;0 0 0 0 0 0 -7 0;0 0 0 0 0 0 0 1;0 0 0 0 0 0 0 0]; B=[0 0;0 0;0 0;1 0;0 0;0 0;0 0;0 1]; Q=[10 0 0 0 0 0 0 0;0 1 0 0 0 0 0 0;0 0 10 0 0 0 0 0;0 0 0 1 0 0 0 0;0 0 0 0 10 0 0 0;0 0 0 0 0 1 0 0;0 0 0 0 0 0 10 0;0 0 0 0 0 0 0 1]; R=[1 0;0 1]; K=lqr(A,B,Q,R) 得反馈矩阵 K = -3.1623 -4.1262 17.7371 6.0394 0 0 0 0 0 -3.1623 0 0 0 6.0394 -4.1262 17.7371
基于PID算法的板球控制系统设计

基于PID算法的板球控制系统设计摘要:本文介绍了一个基于PID算法的板球控制系统设计。
板球是一种具有复杂控制问题的运动项目,需要实时调整投球机构的角度和速度来使球准确投向目标。
PID算法是一种常用的控制算法,适用于各种具有线性或非线性特性的系统。
在本设计中,利用PID算法实现了对板球投球机构的精确控制,并通过仿真和实验验证了系统的有效性。
1.引言板球是一项传统的运动项目,需要运动员准确把球投向对手设立的目标。
由于板球机构的运动特性复杂,需要实时调整角度和速度以适应不同的场景。
传统的机械控制方法需要实时测量系统状态并进行计算,无法在动态环境中实现精准控制。
PID算法是一种经典的控制算法,可根据系统的误差、偏差和积分量来实现闭环控制。
2.系统设计板球控制系统由以下三个部分组成:输入模块、控制模块和输出模块。
输入模块:输入模块负责测量系统状态,包括角度和速度,以及目标状态。
角度和速度可以通过传感器实时测量,目标状态可以通过用户输入或预设值获得。
控制模块:控制模块使用PID算法根据当前状态和目标状态计算控制量,即需要调整的角度和速度。
PID算法包括三个关键参数:比例系数Kp、积分系数Ki和微分系数Kd。
这些参数通过实验来调整,以保证系统的快速响应和稳定性。
输出模块:输出模块将控制量转换为电机控制信号,即将调整后的角度和速度转化为实际的运动。
电机控制信号可以通过电机驱动器来实现。
3.PID算法PID算法根据当前状态和目标状态计算控制量,以实现闭环控制。
PID算法的计算公式为:输出信号=Kp*偏差+Ki*积分+Kd*微分其中,偏差是当前状态与目标状态的差异,积分是偏差的累积和,微分是偏差的变化率。
比例系数Kp权衡了快速响应和稳定性,积分系数Ki 解决了稳态误差,微分系数Kd对抗了速度的变化。
4.仿真和实验为了验证系统的有效性,对板球控制系统进行了仿真和实验。
在仿真实验中,利用MATLAB / Simulink对板球控制系统进行了建模和仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转编码器有增量编码器和绝对编码器两种,如图 3.1 为光电式编码器原理示意图, 它由发光元件、光电码盘、光敏元件和光电检测装置组成。光电式编码器,是一种通过 光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,这是目前应用最 多的传感器。光电码盘是在一定直径的圆板上等分地开通若干个长方形孔,圆板不透光, 而长方孔透光。由于光电码盘与被测装置同轴,被测装置旋转时,光电码盘与之同速旋 转,光源透过光电码盘的孔在光栏板上形成忽明忽暗的光信号,经光电检测装置检测到 并转换为电信号,然后通过信号处理电路的整形、放大、分频、记数、译码后输出。
好 <10ms
好 较小 没有 没有 纯平 好 好 室内或室外
五线电阻屏 中 一般 高 好
内置或外挂 任何物体 4096×4096
好 <15ms
好 较小 没有 没有 纯平 好 好 室内或室外
声波屏 中 好 较高 很好
内置或外挂 手指、软胶 4096×4096
好 <10ms 一般 很大 较大 较小 纯平 一般 一般 室内或室外
深圳市元创兴科技有限公司
Reinovo
实验指导书
自动控制类使用
板球系统的定位控制和轨迹跟踪
实验指导书
第一部分
ቤተ መጻሕፍቲ ባይዱ
深圳市元创兴科技有限公司 2010年12月22日
深圳市元创兴科技有限公司
实验指导书
第一章 实验使用仪器及其连接方式..................................................................................... 1 第二章 系统控制原理简介..................................................................................................... 2 第三章 实验............................................................................................................................. 3
4
深圳市元创兴科技有限公司
实验指导书
五线电阻技术触摸屏的基层把两个方向的电压场通过精密电阻网络都加在玻璃的导 电工作面上,我们可以简单的理解为两个方向的电压场分时工作加在同一工作面上,而 外层镍金导电层只用来当作纯导体,有触摸后分时检测内层ITO接触点X轴和Y轴电压值的 方法测得触摸点的位置。五线电阻触摸屏内层ITO需四条引线,外层只作导体仅仅一条, 触摸屏得引出线共有5条。首先五线电阻触摸屏的A面是导电玻璃而不是导电涂覆层,导 电玻璃的工艺使得A面的寿命得到极大的提高,并且可以提高透光率。其次五线电阻触摸 屏把工作面的任务都交给寿命长的A面,而B面作为导体,并且采用了延展性好、电阻率 低的镍金透明导电层,因此,B面的寿命也极大的提高。
(要修改
5
深圳市元创兴科技有限公司
实验指导书
1、触摸屏实验 双击 Select Experiment 模块,选择试验编号 1,然后双击右侧的“实验 1 运动控 制基础实验”子模块,打开如下界面
深圳市元创兴科技有限公司
第一章 实验使用仪器及其连接方式
实验指导书
一 PC 机 硬件要求: 1、Pentium II、Pentium III、AMD Athlon 或者更高; 2、内存至少 256MB,推荐 256MB 以上; 3、至少有两个 USB 接口; 4、支持 RS-232 串口通信。 软件要求: 1、Microsoft Windows 98、Microsoft Windows 2000、Microsoft Windows XP; 2、Visual C++ 6.0; 3、Matlab 6.5。
二 试验系统 板球系统实验总体结构如图 1.1 所示
图 1.1 板球实验系统总体结构图 本实验系统的主体包括板球、伺服驱动器、数据采集卡、直流伺服电机等。主体、 驱动器、直流伺服电机、电源和数据采集卡都置于实验箱内,实验箱通过两条 USB 数据 线与上位机进行数据交换,另有一条线接 220V 交流电源。
五线电阻触摸屏的另一个专有技术是通过精密的电阻网络来校正A面的线性问题:由 于工艺工程不可避免的有可能厚薄不均而造成电压场不均匀分布,精密电阻网络在工作 时流过绝大部分电流,因此可以补偿工作面有可能的线性失真。
五线电阻触摸屏是目前最好的电阻技术触摸屏,最适合于军事、医疗、工业控制领 域使用。
图 3.2 五线电阻式触摸屏结构 Fig.3.2 Structure chart of five line resistive touch screen
图 2.1 板球系统工作原理图 倒立摆的控制目标有两个,一是定位,即控制小球运动到指定的位置;二是轨迹跟 踪,即控制小球按照给定的轨迹进行运动,如圆形、矩形。整个过程是动态的,表现为 平板上下运动也就是电机的正反转。板球系统的实时性较强,所以采样时间一般取 30ms 左右。 通过建立板球系统的数学模型,我们得到其模型是可控的,所以我们可以通过自动 控制原理课堂所学建立相应的控制器来实现本系统的控制,使它达到稳定。以下介绍的 就是为本系统和自动控制原理相结合而设计的实验。
三 编码器和触摸屏的使用实验 本实验对象为板球系统上的电机尾部编码器和平板上的触摸屏,在充分理解以上实
验原理的基础上进行下列实验。 把两条 USB 数据线与计算机连接(RUN 指示灯亮表示数据采集卡已连接),将电源插
头插入插座(此时实验箱电源开关应是断开的),连接完毕后,打开实验箱电源(SON 指
示灯亮表示电源接通)。双击打开快捷方式“元创兴板球系统实物控制” 图),会看到以下界面
3
深圳市元创兴科技有限公司
实验指导书
不需放大和转换等过程,使用非常方便,因此应用越来越广泛。 二 触摸屏
所谓触摸屏,从市场概念来讲,就是一种人人都会使用的计算机输入设备,或者说 是人人都会使用的与计算机沟通的设备。它的本质是传感器,它由触摸检测部件和触摸 屏控制器组成,主要用于检测对象触摸位置,接受后送触摸屏控制器。从技术原理角度 来讲,触摸屏大体有三个特征:其一它必须保证是透明的,因此它必须通过材料科技来 解决透明问题,像数字化仪、写字板、电梯开关,它们都不是触摸屏;其次它是绝对坐 标,手指摸哪就是哪,不需要第二个动作,不像鼠标,是相对定位的一套系统,第三就 是能检测手指的触摸动作并且判断手指位置,各类触摸屏技术就是围绕“检测手指触摸” 而八仙过海各显神通的。目前,根据传感器的类型,触摸屏大致被分为红外线式、电阻 式、表面声波式和电容式触摸屏四种。
360o n
n —编码器线数。 由于光电式脉冲编码盘每转过一个分辨角就发出一个脉冲信号,因此,根据脉冲数 目可得出工作轴的回转角度,由传动比换算出直线位移距离;根据脉冲频率可得工作轴 的转速;根据 A 、 B 两相信号的相位先后,可判断光电码盘的正、反转,以得到待测装 置转向。 由于光电编码器输出的检测信号是数字信号,因此可以直接进入计算机进行处理,
1
深圳市元创兴科技有限公司
第二章 系统控制原理简介
实验指导书
本实验系统以自动控制中的现代控制理论和模糊控制为理论基础。 板球系统的实验原理是:小球位置采集卡采集到触摸屏上小球位置数据,电机数据 采集卡采集到两个电机尾部编码器数据,电机与平板通过连杆连接,所以通过计算就可 以得到平板的倾斜角位移以及小球的位移,角位移差分得角速度,位移差分可得速度, 然后根据自动控制中的各种理论转化的算法计算出控制量。控制量由计算机通过 USB 数 据线下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成 闭环,从而可以实现平板上小球的定位以及轨迹跟踪。 其工作原理如图 2.1 所示
图 3.1 光电式编码器原理示意图 增量式光电编码器直接利用光电转换原理输出三组方波脉冲 A 、B 和 Z 相;A 、B 两 组脉冲相位差 2 ,将输出信号送入鉴向电路,从而可方便地判断出旋转方向,而 Z 相为 每转一个脉冲,用于基准点定位。 光电式增量编码器的测量精度取决于它所能分辨的最小角度 (分辨角、分辨率), 而这与码盘圆周内所分狭缝的线数有关。
红外屏 高 好 一般 很好 外挂 截面
977×737 差
<20ms 好 较小 较大 较大 纯平 一般 好 室内
电容屏 较高 好 一般 一般 内置 手指 4096×4096 差 <15ms 好 较小 较大 较大 均可 好 一般 室内或室外
综 合 表 3.1 各 种触摸屏 的 优缺点 对照表, 并且 考虑到实 际应 用 环境 , 本系统 选 用 AccuTouch 五线电阻触摸屏。
2
深圳市元创兴科技有限公司
第三章 实验
实验指导书
实验一 运动控制基础实验
本实验的目的是让实验者熟悉旋转编码器和触摸屏的基本原理,掌握利用计算机和 数据采集卡对编码器和触摸屏进行数据采集的方法,以及利用计算机对电机进行控制的 基本原理和方法,了解机电一体化的两个重要内容:传感技术和运动控制技术。以便顺 利完成倒立摆的各项试验。 一 编码器原理
实验一 运动控制基础实验.................................................................................................................... 3 实验二 板球系统调平板水平实验........................................................................................................ 8 实验三 板球系统建模、仿真及实验.................................................................................................. 10 实验四 状态空间极点配置控制实验.................................................................................................. 19 实验五 线性二次最优控制 LQR 控制实验..........................................................................................33 实验六 模糊控制实验.......................................................................................................................... 40 实验七 变论域模糊控制实验.............................................................................................................. 47