STM32F4库函数笔记
使用STM32F4XX自带数学库“arm
使用STM32F4XX自带数学库“arm使用STM32F4XX自带数学库"arm_math.h"STM32-F4属于Cortex-M4F构架,这与M0、M3的最大不同就是具有FPU(浮点运算单元),支持浮点指令集,因此在处理数学运算时能比M0/M3高出数十倍甚至上百倍的性能,但是要充分发挥FPU的数学性能,除了#include “arm_math.h”(而非用编译器自带的math.h)以外,(arm_math.h位于\Libraries\CMSIS\Include文件夹)还需要进行设置。
1、代码设置如果没有启动FPU而使用数学函数运算时,CPU执行时认为遇到非法指令而跳转到HardFault_Handler()中断函数中死循环。
因此,需要在系统初始化时开启FPU。
在system_stm32f4xx.c中的SystemInit()函数中添加如下代码:/* FPU settings ------------------------------------------------------------*/#if (__FPU_PRESENT == 1) && (__FPU_USED == 1)SCB->CPACR |= ((3UL << 10*2)|(3UL << 11*2)); /* set CP10 and CP11 Full Access */#endif2、编译控制从上面的代码可以看出,当__FPU_PRESENT=1且__FPU_USED=1时,编译时就加入了启动FPU的代码,CPU也就能正确高效的使用FPU进行简单的加减乘除了。
但是对于复杂运算要充分发挥M4F的浮点功能,就需要使用固件库自带的arm_math.h而非编译器自带的math.h,这个文件根据编译控制项(__FPU_USED ==1)来决定是使用哪一种函数方法:如果没有使用FPU,那就调用keil的标准math.h头文件中定义的函数;如果使用了FPU,那就是用固件库自带的优化函数来解决问题。
STM32F4 第6讲 STM32时钟系统+SystemInit函数解读-M4
③、LSI是低速内部时钟,RC振荡器,频率为32kHz,提供低功耗时钟。主要供独立看 门狗和自动唤醒单元使用。
④、LSE是低速外部时钟,接频率为32.768kHz的石英晶体。RTC ⑤、PLL为锁相环倍频输出。STM32F4有两个PLL:
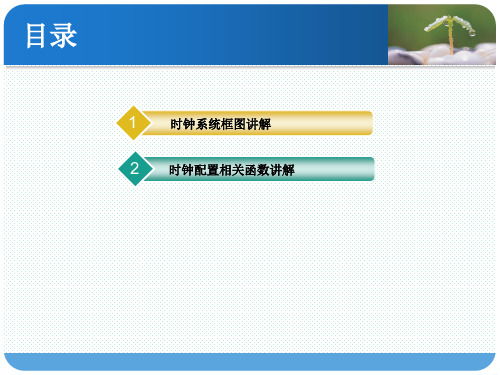
目录
1
时钟系统框图讲解
2 时钟配置相关函数讲解
时钟系统讲解
参考资料:
Keil MDK中自带的英文资料
✓ 时钟系统框图
✓ 时钟系统知识总结
1. STM32 有5个时钟源:HSI、HSE、LSI、LSE、PLL。
①、HSI是高速内部时钟,RC振荡器,频率为16MHz,精度不高。可以直接作为系统 时钟或者用作PLL时钟输入。
2. 时钟源和时钟相关配置:
RCC_HSEConfig, RCC_LSEConfig, RCC_PLLConfig, RCC_PLLI2SConfig, RCC_PLLSAIConfig, RCC_MCO1Config, RCC_MCO2Config, RCC_SYSCLKConfig, RCC_HCLKConfig,RCC_PCLK1Config, RCC_PCLK2Config,RCC_RTCCLKConfig,RCC_I2SCLKConfig
主PLL(PLL)由HSE或者HSI提供时钟信号,并具有两个不同的输出时钟。 ✓ 第一个输出PLLP用于生成高速的系统时钟(最高168MHz) ✓ 第二个输出PLLQ用于生成USB OTG FS的时钟(48MHz),随机数发生器 的时钟和SDIO时钟。
专用PLL(PLLI2S)用于生成精确时钟,从而在I2S接口实现高品质音频性能。
STM32F4xxx 参考手册学习摘录

2存储器和总线架构64 KB CCM(内核耦合存储器)数据RAM 不属于总线矩阵,只能通过CPU 对其进行访问。
对APB 寄存器执行16 位或8 位访问时,该访问将转换为32 位访问:总线桥将16 位或8 位数据复制后提供给32 位向量。
存储器组织结构程序存储器、数据存储器、寄存器和I/O 端口排列在同一个顺序的 4 GB 地址空间内。
各字节按小端格式在存储器中编码。
字中编号最低的字节被视为该字的最低有效字节,而编号最高的字节被视为最高有效字节。
嵌入式SRAMSTM32F405xx/07xx 和STM32F415xx/17xx 带有4 KB 备份SRAM(请参见第5.1.2 节:电池备份域)和192 KB 系统SRAM系统SRAM 分为三个块:●映射在地址0x2000 0000 的112 KB 和16 KB 块●映射在地址0x2002 0000 的64 KB 块,(适用于STM32F42xxx 和STM32F43xxx)。
AHB 主总线支持并发SRAM 访问(通过以太网或USB OTG HS):例如,当CPU 对112 KB 或64 KB SRAM 进行读/写操作时,以太网MAC 可以同时对16 KB SRAM 进行读/写操作。
●在地址0x1000 0000 映射的64 KB 块,只能供CPU 通过数据总线访问。
位段Cortex™-M4F 存储器映射包括两个位段区域。
这些区域将存储器别名区域中的每个字映射到存储器位段区域中的相应位。
在别名区域写入字时,相当于对位段区域的目标位执行读-修改-写操作。
bit_word_addr = bit_band_base + (byte_offset x 32) + (bit_number × 4)BOOT0 为专用引脚,而BOOT1 则与GPIO 引脚共用。
一旦完成对BOOT1 的采样,相应GPIO 引脚即进入空闲状态,可用于其它用途。
器件退出待机模式时,还会对BOOT 引脚重新采样。
STM32F4 DSP库学习笔记5-复数FFT的实现方法
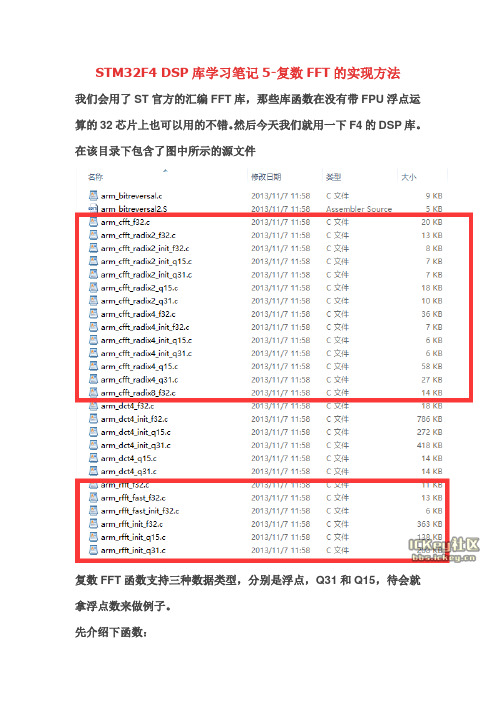
STM32F4 DSP库学习笔记5-复数FFT的实现方法我们会用了ST官方的汇编FFT库,那些库函数在没有带FPU浮点运算的32芯片上也可以用的不错。
然后今天我们就用一下F4的DSP库。
在该目录下包含了图中所示的源文件复数FFT函数支持三种数据类型,分别是浮点,Q31和Q15,待会就拿浮点数来做例子。
先介绍下函数:void arm_cfft_f32(const arm_cfft_instance_f32 * S,float32_t * p1,uint8_t ifftFlag,uint8_t bitReverseFlag);arm_cfft_instance_f32 * S是一个结构体指针这个结构体包含FFT运算的旋转因子和位反转表,就相当于一个常量,我们不用去管它。
float32_t * p1,是输入复数数组的地址,长度应该是运算点数的两倍,注意的是输入和输出共用一块缓存uint8_t ifftFlag,是运算的正反标志ifftFlag=1是反变换。
ifftFlag=0是正变换uint8_t bitReverseFlag,是flag that enables (bitReverseFlag=1) or disables (bitReverseFlag =0) bit好,然后就只要这一句话就可以计算复数的FFT正变换arm_cfft_f32(&arm_cfft_sR_f32_len1024,testInput,0, 1);计算出结果后,用下面语句就可以求出幅值了;arm_cmplx_mag_f32(testInput, testOutput, 1024);关于arm_cmplx_mag_f32(testInput, testOutput, 1024),它的原型是:void arm_cmplx_mag_f32(float32_t * pSrc,float32_t * pDst,uint32_t numSamples);这个函数是求复数的模值float32_t * pSrc,是输入数组地址float32_t * pDst,是输出数组地址uint32_t numSamples是运算点数当然上面语句中testInput数组的长度是testOutput数组的两倍。
第四章 STM32F4开发基础知识入门-正点原子探索者STM32F4开发板-STM32F4开发指南-库函数
第四章STM32F4开发基础知识入门这一章,我们将着重STM32开发的一些基础知识,让大家对STM32开发有一个初步的了解,为后面STM32的学习做一个铺垫,方便后面的学习。
这一章的内容大家第一次看的时候可以只了解一个大概,后面需要用到这方面的知识的时候再回过头来仔细看看。
这章我们分7个小结,·4.1 MDK下C语言基础复习·4.2 STM32F4系统架构·4.3 STM32F4时钟系统·4.4 IO引脚复用器和映射·4.5 STM32F4 NVIC中断优先级管理·4.6 MDK中寄存器地址名称映射分析·4.7 MDK固件库快速开发技巧4.1 MDK下C语言基础复习这一节我们主要讲解一下C语言基础知识。
C语言知识博大精深,也不是我们三言两语能讲解清楚,同时我们相信学STM32F4这种级别MCU的用户,C语言基础应该都是没问题的。
我们这里主要是简单的复习一下几个C语言基础知识点,引导那些C语言基础知识不是很扎实的用户能够快速开发STM32程序。
同时希望这些用户能够多去复习一下C语言基础知识,C语言毕竟是单片机开发中的必备基础知识。
对于C语言基础比较扎实的用户,这部分知识可以忽略不看。
4.1.1 位操作C语言位操作相信学过C语言的人都不陌生了,简而言之,就是对基本类型变量可以在位级别进行操作。
这节的内容很多朋友都应该很熟练了,我这里也就点到为止,不深入探讨。
下面我们先讲解几种位操作符,然后讲解位操作使用技巧。
C表4.1.1 16种位操作这些与或非,取反,异或,右移,左移这些到底怎么回事,这里我们就不多做详细,相信大家学C语言的时候都学习过了。
如果不懂的话,可以百度一下,非常多的知识讲解这些操作符。
下面我们想着重讲解位操作在单片机开发中的一些实用技巧。
1)不改变其他位的值的状况下,对某几个位进行设值。
这个场景单片机开发中经常使用,方法就是先对需要设置的位用&操作符进行清零操作,然后用|操作符设值。
STM32各模块学习笔记
STM32中断优先级和开关总中断一,中断优先级:STM32(Cortex-M3)中的优先级概念STM32(Cortex-M3)中有两个优先级的概念——抢占式优先级和响应优先级,有人把响应优先级称作'亚优先级'或'副优先级',每个中断源都需要被指定这两种优先级。
具有高抢占式优先级的中断可以在具有低抢占式优先级的中断处理过程中被响应,即中断嵌套,或者说高抢占式优先级的中断可以嵌套低抢占式优先级的中断。
当两个中断源的抢占式优先级相同时,这两个中断将没有嵌套关系,当一个中断到来后,如果正在处理另一个中断,这个后到来的中断就要等到前一个中断处理完之后才能被处理。
如果这两个中断同时到达,则中断控制器根据他们的响应优先级高低来决定先处理哪一个;如果他们的抢占式优先级和响应优先级都相等,则根据他们在中断表中的排位顺序决定先处理哪一个。
既然每个中断源都需要被指定这两种优先级,就需要有相应的寄存器位记录每个中断的优先级;在Cortex-M3中定义了8个比特位用于设置中断源的优先级,这8个比特位可以有8种分配方式,如下:所有8位用于指定响应优先级最高1位用于指定抢占式优先级,最低7位用于指定响应优先级最高2位用于指定抢占式优先级,最低6位用于指定响应优先级最高3位用于指定抢占式优先级,最低5位用于指定响应优先级最高4位用于指定抢占式优先级,最低4位用于指定响应优先级最高5位用于指定抢占式优先级,最低3位用于指定响应优先级最高6位用于指定抢占式优先级,最低2位用于指定响应优先级最高7位用于指定抢占式优先级,最低1位用于指定响应优先级这就是优先级分组的概念。
--------------------------------------------------------------------------------Cortex-M3允许具有较少中断源时使用较少的寄存器位指定中断源的优先级,因此STM32把指定中断优先级的寄存器位减少到4位,这4个寄存器位的分组方式如下:第0组:所有4位用于指定响应优先级第1组:最高1位用于指定抢占式优先级,最低3位用于指定响应优先级第2组:最高2位用于指定抢占式优先级,最低2位用于指定响应优先级第3组:最高3位用于指定抢占式优先级,最低1位用于指定响应优先级第4组:所有4位用于指定抢占式优先级可以通过调用STM32的固件库中的函数NVIC_PriorityGroupConfig()选择使用哪种优先级分组方式,这个函数的参数有下列5种:NVIC_PriorityGroup_0 => 选择第0组NVIC_PriorityGroup_1 => 选择第1组NVIC_PriorityGroup_2 => 选择第2组NVIC_PriorityGroup_3 => 选择第3组NVIC_PriorityGroup_4 => 选择第4组接下来就是指定中断源的优先级,下面以一个简单的例子说明如何指定中断源的抢占式优先级和响应优先级:// 选择使用优先级分组第1组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);// 使能EXTI0中断NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 指定抢占式优先级别1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 指定响应优先级别0NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);// 使能EXTI9_5中断NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 指定抢占式优先级别0NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 指定响应优先级别1NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);要注意的几点是:1)如果指定的抢占式优先级别或响应优先级别超出了选定的优先级分组所限定的范围,将可能得到意想不到的结果;2)抢占式优先级别相同的中断源之间没有嵌套关系;3)如果某个中断源被指定为某个抢占式优先级别,又没有其它中断源处于同一个抢占式优先级别,则可以为这个中断源指定任意有效的响应优先级别。
stm32f4系列延时函数
stm32f4系列延时函数32f4系列延时函数是一种可以延迟特定时间内回调函数或程序的函数,它是一种电路可控延时方案,广泛应用于空中调度、电话呼叫、传感器和自动控制等多个应用领域。
32f4系列延时函数可精确延时微秒、毫秒或秒的时间,满足这些应用的高精度需求。
32f4系列延时函数是一种可控延时方案,它包含四个控制参数:延迟时间、延迟模式、超时模式和中断允许位。
它提供一种简单的方法,用户可以设置他们所需要的延迟时间。
32f4系列延时函数可以有效减少硬件资源消耗,并且响应时间非常快,可以满足高速应用的高精度和低消耗的需求。
由于32f4系列延时函数具有方便、快捷、多功能等诸多优点,广泛应用于多个应用领域。
在空中调度领域,32f4系列延时函数可以实现各种定时功能,可以满足多种场景的需求,比如定时应答、发射计时器和信号统计等。
同样,在电话呼叫和传感器应用领域,32f4系列延时函数也可以有效地延时,实现更准确的定时和调度。
此外,在自动控制应用领域,32f4系列延时函数可以实现自动计时、自动调节、阶段定时等功能,满足自动控制的高精度需求。
32f4系列延时函数的使用也非常简单。
用户只需要配置函数参数,就可以实现所需要的延时时间,也可以根据不同的实际需求来设置不同的延时时间。
同时,软件设计者也可以根据延时函数的不同参数设置,灵活调整延时函数的行为和功能。
总之,32f4系列延时函数是一种灵活的可控延时方案,可以有效满足空中调度、电话呼叫、传感器和自动控制等多个应用领域的需求。
它的高精度和低消耗,可以满足应用的最高要求,而且使用也非常方便。
因此,32f4系列延时函数是当今很多电子设备开发中不可或缺的一种组件。
STM32F4学习笔记之EXTI中断(使用固件库)
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOF, EXTI_PinSource11);
EXTI_InitStructure.EXTI_Line = EXTI_Line11;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 ; //led
2.配置对应GPIO为输入模式
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_Init(GPIOx,&GPIO_InitStructure);
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)GPIO_Mode_AIN 模拟输入(2)GPIO_Mode_IN_FLOATING 浮空输入(3)GPIO_Mode_IPD 下拉输入(4)GPIO_Mode_IPU 上拉输入(5)GPIO_Mode_Out_OD 开漏输出(6)GPIO_Mode_Out_PP 推挽输出(7)GPIO_Mode_AF_OD 复用开漏输出(8)GPIO_Mode_AF_PP 复用推挽输出平时接触的最多的也就是推挽输出、开漏输出、上拉输入这三种推挽输出:可以输出高,低电平,连接数字器件;开漏输出:输出端相当于三极管的集电极. 要得到高电平状态需要上拉电阻才行,一般来说,开漏是用来连接不同电平的器件,匹配电平用的,因为开漏引脚不连接外部的上拉电阻时,只能输出低电平。
浮空输入:由于浮空输入一般多用于外部按键输入,结合图上的输入部分电路,我理解为浮空输入状态下,IO的电平状态是不确定的,完全由外部输入决定,如果在该引脚悬空的情况下,读取该端口的电平是不确定的。
GPIOGPIO_Init函数初始化{GPIO_InitTypeDef GPIO_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能GPIOF时钟//GPIOF9,F10初始化设置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;//LED0和LED1对应IO口GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHzGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化GPIOF9,F10}2个读取输入电平函数:uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);作用:读取某个GPIO的输入电平。
实际操作的是GPIOx_IDR寄存器。
例如:GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_5);//读取GPIOA.5的输入电平uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);作用:读取某组GPIO的输入电平。
实际操作的是GPIOx_IDR寄存器。
例如:GPIO_ReadInputData(GPIOA);//读取GPIOA组中所有io口输入电平2个读取输出电平函数:uint8_t GPIO_ReadOutputDataBit (GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);作用:读取某个GPIO的输出电平。
实际操作的是GPIO_ODR寄存器。
例如:GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_5);//读取GPIOA.5的输出电平uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);作用:读取某组GPIO的输出电平。
实际操作的是GPIO_ODR寄存器。
例如:GPIO_ReadOutputData(GPIOA);//读取GPIOA组中所有io口输出电平4个设置输出电平函数:void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);作用:设置某个IO口输出为高电平(1)。
实际操作BSRRL寄存器void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);作用:设置某个IO口输出为低电平(0)。
实际操作的BSRRH寄存器。
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal); void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);后两个函数不常用,也是用来设置IO口输出电平。
端口复用为复用功能配置过程-以PA9,PA10配置为串口1为例1、GPIO端口时钟使能。
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);2、复用外设时钟使能。
比如你要将端口PA9,PA10复用为串口,所以要使能串口时钟。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);3、端口模式配置为复用功能。
GPIO_Init()函数。
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能中断优先级设置步骤1、系统运行后先设置中断优先级分组。
调用函数:void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);整个系统执行过程中,只设置一次中断分组。
2、针对每个中断,设置对应的抢占优先级和响应优先级:void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);如果需要挂起/解挂,查看中断当前激活状态,分别调用相关函数即可。
独立看门狗操作步骤1、取消寄存器写保护:IWDG_WriteAccessCmd();2、设置独立看门狗的预分频系数,确定时钟:IWDG_SetPrescaler();3、设置看门狗重装载值,确定溢出时间:IWDG_SetReload();4、使能看门狗IWDG_Enable();5、应用程序喂狗:IWDG_ReloadCounter();溢出时间计算:Tout=((4×2^prer) ×rlr) /32 (M4)在主函数,要设置中断优先级分组NVIC_PriorityGroupConfig();delay_init(168); 配置时钟窗口看门狗配置过程void WWDG_Init(u8 tr,u8 wr,u32 fprer)1、使能看门狗时钟:RCC_APB1PeriphClockCmd();2、设置分频系数:WWDG_SetPrescaler();3、设置上窗口值:WWDG_SetWindowValue();4、开启提前唤醒中断并分组(可选):WWDG_EnableIT();NVIC_Init();WWDG_ClearFlag();//清除提前唤醒标志位5、使能看门狗:WWDG_Enable();;7、编写中断服务函数WWDG_IRQHandler();1)喂狗:WWDG_SetCounter();2)清除标志位WWDG_ClearFlag();在主函数,要设置中断优先级分组NVIC_PriorityGroupConfig();delay_init(168); 配置时钟外部中断STM32F4的每个IO都可以作为外部中断输入。
STM32F4的中断控制器支持22个外部中断/事件请求EXTI线0~15:对应外部IO口的输入中断。
EXTI线16:连接到PVD输出。
EXTI线17:连接到RTC闹钟事件。
EXTI线18:连接到USB OTG FS唤醒事件。
EXTI线19:连接到以太网唤醒事件。
EXTI线20:连接到USB OTG HS(在FS中配置)唤醒事件。
EXTI线21:连接到RTC入侵和时间戳事件。
EXTI线22:连接到RTC唤醒事件。
外部中断的一般配置步骤:1、使能SYSCFG时钟:RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);2、初始化IO口为输入。
GPIO_Init();3、设置IO口与中断线的映射关系。
void SYSCFG_EXTILineConfig();4、初始化线上中断,设置触发条件等。
EXTI_Init();5、配置中断分组(NVIC),并使能中断。
NVIC_Init();6、编写中断服务函数。
EXTIx_IRQHandler();1)清除中断标志位EXTI_ClearITPendingBit();在主函数,要设置中断优先级分组NVIC_PriorityGroupConfig();delay_init(168); 配置时钟串口配置的一般步骤1、串口时钟使能:RCC_APBxPeriphClockCmd();GPIO时钟使能:RCC_AHB1PeriphClockCmd();2、引脚复用映射:GPIO_PinAFConfig();3、GPIO端口模式设置:GPIO_Init(); 模式设置为GPIO_Mode_AF4、串口参数初始化:USART_Init();5、开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)NVIC_Init();USART_ITConfig();6、使能串口:USART_Cmd();7、编写中断处理函数:USARTx_IRQHandler();8、串口数据收发:void USART_SendData();//发送数据到串口,DRuint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据9、串口传输状态获取:FlagStatus USART_GetFlagStatus();void USART_ClearITPendingBit();串口中断服务函数不用清除中断在主函数,要设置中断优先级分组NVIC_PriorityGroupConfig();定时器中断实现步骤void Timx_init(u8 arr,psc);1、能定时器时钟。
RCC_APB1PeriphClockCmd();2、初始化定时器,配置ARR,PSC。
TIM_TimeBaseInit();TIM_TIConfig();//使能更新中断3、开启定时器中断,配置NVIC。
NVIC_Init();4、使能定时器。
TIM_Cmd();5、编写中断服务函数。
TIMx_IRQHandler();1)判断中断模式TIM_GetTIStatus(TIMx,中断模式);2)清除标志TIM_ClearITPendingBit();在主函数,要设置中断优先级分组NVIC_PriorityGroupConfig();delay_init(168); 配置时钟PWM输出配置步骤:void TIM14_PWM_Init(u32 arr,u32 psc);1、使能定时器14和相关IO口时钟。