机械无级变速机构
无级变速工作原理
无级变速工作原理
无级变速工作原理是指通过一种无级变速装置,使发动机转速和车辆速度可以无级连续地调节,从而满足不同行驶条件下的动力与速度要求。
无级变速器主要由两个主要部分组成:变速器和传动系统。
变速器是实现无级变速的关键组件,它由输入轴、输出轴和一系列齿轮组成。
输入轴与发动机相连,输出轴与车轮相连。
齿轮组通过齿轮比的不断变化来改变输入轴与输出轴之间的传动比。
传统的变速器需要离合器和多个齿轮来实现不同传动比的切换,而无级变速器则通过采用一对变径齿轮来实现无级连续的传动比变化。
无级变速器中的变径齿轮由两个分别相切的圆锥面组成,其中一个圆锥面直径可变。
当两个圆锥面相互滚动时,直径可变的圆锥面会改变与另一个圆锥面间的摩擦接触半径,从而改变两个齿轮之间的传动比。
通过控制变径齿轮之间的压力和摩擦力,可以实现速度和动力的连续调节。
传动系统是无级变速器的辅助装置,它通过压力油泵、液压控制阀和油路系统来控制变速器的工作。
传动系统中的液压控制阀根据车辆当前的工况和驾驶者的操作,通过控制液压油的压力和流量来精确调节变速器的传动比。
这种液压控制方式能够实现无级连续的传动比变化,使得发动机可以在最佳工作区域高效输出动力,提高燃油经济性和行驶舒适性。
总之,无级变速器通过变径齿轮和液压控制系统的协同作用,
实现了发动机转速和车辆速度的无级连续调节,使得车辆在不同的行驶条件下能够达到最优的动力输出和燃油经济性。
铲车无级变速工作原理

铲车无级变速工作原理
铲车无级变速是一种基于液力传动的变速装置,其工作原理主要由液力变矩器和行星齿轮传动组成。
首先,液力变矩器是铲车无级变速的关键部件之一。
它由驱动轮、泵轮和涡轮组成。
驱动轮由发动机通过传动带传动得到动力,泵轮通过传动带与驱动轮相连,涡轮则与传动轴相连。
当发动机工作时,驱动轮带动泵轮旋转,泵轮将液体压入涡轮中,产生涡轮旋转的动力。
其次,行星齿轮传动是铲车无级变速的另一个重要部分。
它由太阳齿轮、行星轮和环形齿轮组成。
太阳齿轮与液力变矩器的涡轮相连,行星轮与铲车的驱动轮相连,环形齿轮与行星轮和太阳齿轮相互嵌合。
当液力变矩器传动的涡轮旋转时,太阳齿轮也进行同步旋转,而行星轮则通过行星齿轮与环形齿轮相互嵌合和同步旋转。
通过不同组合的行星轮、太阳齿轮和环形齿轮的嵌合方式,可以实现不同的传动比例,从而达到无级变速的效果。
在运行过程中,铲车驾驶员可以通过操纵控制杆来调整液力变矩器和行星齿轮传动组合的方式,从而实现铲车的速度调节。
当需要快速加速时,可以选择较小的传动比例;当需要慢速工作或承载重物时,则可以选择较大的传动比例。
通过不同的传动比例组合,铲车能够在不同工况下实现平稳高效的运行。
总结来说,铲车无级变速的工作原理是通过液力传动和行星齿
轮传动实现的,通过调整液力变矩器和行星齿轮传动组合,可以实现铲车的无级变速,从而适应不同的工作需求。
小功率机械摩擦式无级变速器结构设计

目录摘要 (2)Abstract: (4)第一章绪论 (5)§1.2 机械无级变速器的特征和应用 (6)§1.3机械无级变速器的选用和润滑密封 (8)§1.4 本文的主要内容及要求 (10)第二章摩擦无级变速器的机械特性加压装置和调速机构 (11)§2.1 机械特性 (11)§2.2 调速操纵机构 (12)§2.3 加压装置 (13)第三章摩擦式无级变速器设计说明和计算过程 (14)§3.1 摩擦机械无级变速器的工作原理 (14)§3.2 摩擦无级变速器的特点 (15)§3.3 锥轮的设计与计算 (15)§3.4 钢环的设计与计算 (19)1、钢环尺寸和参数的确定 (19)2、强度验算 (21)§3.5 轴系的设计 (22)§3.6 轴的结构设计 (23)第四章主要零件的校核 (25)§4.1 .输出,输入轴的校核 (25)§4.2 . 轴承的校核 (26)总结 (27)致谢 (28)参考文献资料 (29)附录:文献翻译 (29)摩擦式机械无级变速器结构设计摘要在某种控制的作用下,使机器的输出轴转速可在两个极值范围内连续变化的无级变速器传动随着机械、材质及加工工艺的高速发展和其需求量日益增多而得到广泛应用和发展。
无级变速器的主动和从动两根轴通过传递转矩的中间介质(机械构件、流体、电磁流等)把两根轴直接或间接地联系起来并传递动力。
当对主、从动轴的联系关系进行控制时,则两轴间的传动比发生变化(在两极值范围内连续而任意地变化)。
用机械构件作为中间介质的为机械无级变速器,其包括摩擦式和脉动式。
无级变速器与定传动比传动及有级变速传动(它只有有限的几种传动比)相比,其优点是能够根据工作需要在一定范围内连续变换速度,以适应输出转速和外界负载变化的要求,摩擦式机械无级变速器依靠传动元件之间的摩擦进行传动,钢材材质、加工工艺水平和润滑油料品质等因素是摩擦式机械式无级变速器不断发展的重要保证。
简述机械式无级变速器工作原理

简述机械式无级变速器工作原理
无级变速器是一种能够实现连续无级变速的传动装置,其工作原理是通过改变齿轮的直径来调整传动比,从而实现车辆的加速或减速。
机械式无级变速器是一种常见的无级变速器类型,其工作原理相对简单,但非常高效。
机械式无级变速器由两组齿轮组成,分别称为动力齿轮和驱动齿轮。
这两组齿轮被安装在一条特殊的轴上,通过液压或机械手段来调整它们之间的距离,从而改变它们之间的啮合半径,实现无级变速的效果。
当车辆需要加速时,机械式无级变速器会通过液压或机械手段调整动力齿轮和驱动齿轮之间的距离,使它们的啮合半径增大,从而实现较高的传动比。
这样,发动机输出的扭矩就能够更有效地传递到车轮上,车辆就能够实现快速加速。
相反,当车辆需要减速或保持匀速行驶时,机械式无级变速器会调整动力齿轮和驱动齿轮之间的距离,使它们的啮合半径减小,从而实现较低的传动比。
这样,发动机输出的扭矩就能够更有效地传递到车轮上,车辆就能够实现减速或保持匀速行驶。
总的来说,机械式无级变速器通过调整动力齿轮和驱动齿轮之间的距离,改变它们之间的啮合半径,从而实现连续无级变速。
这种传动装置不仅具有较高的传动效率,还能够提高车辆的加速性能和燃
油经济性,因此在现代车辆中得到了广泛应用。
总的来说,机械式无级变速器通过调整动力齿轮和驱动齿轮之间的距离,改变它们之间的啮合半径,从而实现连续无级变速。
这种传动装置不仅具有较高的传动效率,还能够提高车辆的加速性能和燃油经济性,因此在现代车辆中得到了广泛应用。
无级调速减速机MB

MB planetary friction mechanical infinite speed variator
RX
X
RV
274 165
1. MB系列行星摩擦式机械无级变速机概述
MB系列行星摩擦式机械无级变速机主要由压紧的主 动装置、摩擦传动机构、调速控制机构组成。 变速范围大: 调 速范围R=5,即输出转 速 可在输 入 转速的1/1.45至1/7.25之间任意变化 ,适合 连 续工 作,可以正反运转,能在负载起动及 负载 中按需 要调节速 度,适应工艺参数多边或连续变 化 的要 求。 调速精度高、高强度、同轴结构,体积 小, 重量 轻。性能稳定,在允许负载下,选定的 输 出速度 恒定。运行平稳、噪声低、寿命长、 维修 少、操 作简单、 效率高。 组合能力强: 可 与各种减速机直联式 组合 ,实 现小 体积、 高效率的 低、高速无级变速,因而该机具 有 良好 适应性。 旋转方向: 基 本型输入轴与输出轴 旋转方 向 相同; 其它组合 型根据传动极数等确认旋转 方 向。 输入转速: 机 座MB07以下不高于2800rpm, 机座大 于MB07输入速度不超过1400rpm, 全系列 输 入转 速以不低于750rpm为 适宜。 跑合要求: 变速机跑合开始时,温升 可高 于正常工 作的温升,当跑合60-80小时后,温升逐 渐降 低至 正常温升。在跑合期内需经常调速, 以利 于长 期 的稳定使用;跑合时的高温影响正常和允 许 的工 作条件,但对部件的使用寿命并无有害 影响 。
276 167
电机代号 Motor mode
6. MB基本型无级变速机
6. MB basic type variable drive
6.1 Model and specification list 6.1 型号规格表 MB变速器配4极电机(1450r/min)的型号规格表 Model and specification list of MB speed variator matched grade 4 motor (rotation rate 1450rpm)
液压机械无级变速器( HMT)原理及应用分析
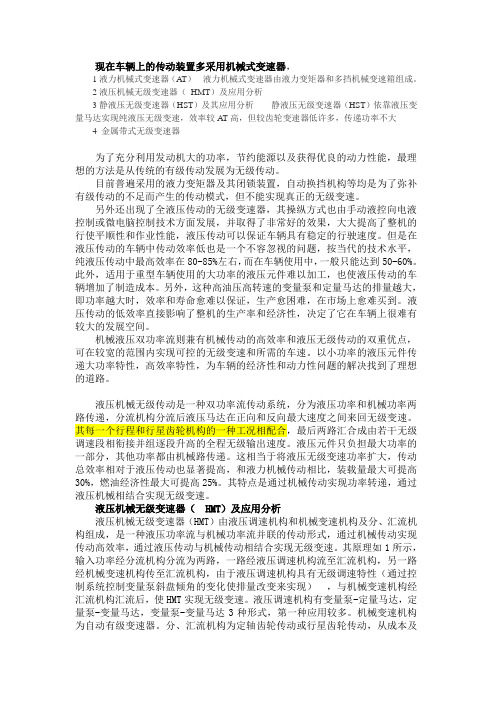
现在车辆上的传动装置多采用机械式变速器,1液力机械式变速器(AT)液力机械式变速器由液力变矩器和多挡机械变速箱组成。
2液压机械无级变速器(HMT)及应用分析3静液压无级变速器(HST)及其应用分析静液压无级变速器(HST)依靠液压变量马达实现纯液压无级变速,效率较AT高,但较齿轮变速器低许多,传递功率不大4 金属带式无级变速器为了充分利用发动机大的功率,节约能源以及获得优良的动力性能,最理想的方法是从传统的有级传动发展为无级传动。
目前普遍采用的液力变矩器及其闭锁装置,自动换挡机构等均是为了弥补有级传动的不足而产生的传动模式,但不能实现真正的无级变速。
另外还出现了全液压传动的无级变速器,其操纵方式也由手动液控向电液控制或微电脑控制技术方面发展,并取得了非常好的效果,大大提高了整机的行使平顺性和作业性能,液压传动可以保证车辆具有稳定的行驶速度。
但是在液压传动的车辆中传动效率低也是一个不容忽视的问题,按当代的技术水平,纯液压传动中最高效率在80-85%左右,而在车辆使用中,一般只能达到50-60%。
此外,适用于重型车辆使用的大功率的液压元件难以加工,也使液压传动的车辆增加了制造成本。
另外,这种高油压高转速的变量泵和定量马达的排量越大,即功率越大时,效率和寿命愈难以保证,生产愈困难,在市场上愈难买到。
液压传动的低效率直接影响了整机的生产率和经济性,决定了它在车辆上很难有较大的发展空间。
机械液压双功率流则兼有机械传动的高效率和液压无级传动的双重优点,可在较宽的范围内实现可控的无级变速和所需的车速。
以小功率的液压元件传递大功率特性,高效率特性,为车辆的经济性和动力性问题的解决找到了理想的道路。
液压机械无级传动是一种双功率流传动系统,分为液压功率和机械功率两路传递,分流机构分流后液压马达在正向和反向最大速度之间来回无级变速。
其每一个行程和行星齿轮机构的一种工况相配合,最后两路汇合成由若干无级调速段相衔接并组逐段升高的全程无级输出速度。
液压机械无级变速器( HMT)原理及应用分析
现在车辆上的传动装置多采用机械式变速器,1液力机械式变速器(AT)液力机械式变速器由液力变矩器和多挡机械变速箱组成。
2液压机械无级变速器(HMT)及应用分析3静液压无级变速器(HST)及其应用分析静液压无级变速器(HST)依靠液压变量马达实现纯液压无级变速,效率较AT高,但较齿轮变速器低许多,传递功率不大4 金属带式无级变速器为了充分利用发动机大的功率,节约能源以及获得优良的动力性能,最理想的方法是从传统的有级传动发展为无级传动。
目前普遍采用的液力变矩器及其闭锁装置,自动换挡机构等均是为了弥补有级传动的不足而产生的传动模式,但不能实现真正的无级变速。
另外还出现了全液压传动的无级变速器,其操纵方式也由手动液控向电液控制或微电脑控制技术方面发展,并取得了非常好的效果,大大提高了整机的行使平顺性和作业性能,液压传动可以保证车辆具有稳定的行驶速度。
但是在液压传动的车辆中传动效率低也是一个不容忽视的问题,按当代的技术水平,纯液压传动中最高效率在80-85%左右,而在车辆使用中,一般只能达到50-60%。
此外,适用于重型车辆使用的大功率的液压元件难以加工,也使液压传动的车辆增加了制造成本。
另外,这种高油压高转速的变量泵和定量马达的排量越大,即功率越大时,效率和寿命愈难以保证,生产愈困难,在市场上愈难买到。
液压传动的低效率直接影响了整机的生产率和经济性,决定了它在车辆上很难有较大的发展空间。
机械液压双功率流则兼有机械传动的高效率和液压无级传动的双重优点,可在较宽的范围内实现可控的无级变速和所需的车速。
以小功率的液压元件传递大功率特性,高效率特性,为车辆的经济性和动力性问题的解决找到了理想的道路。
液压机械无级传动是一种双功率流传动系统,分为液压功率和机械功率两路传递,分流机构分流后液压马达在正向和反向最大速度之间来回无级变速。
其每一个行程和行星齿轮机构的一种工况相配合,最后两路汇合成由若干无级调速段相衔接并组逐段升高的全程无级输出速度。
MB系列行星摩擦机械无级变速机
MB系列行星摩擦机械无级变速机MB系列行星摩擦机械无级变速机一、工作原理结构图1 输出轴2 行星架3 固定平面凸轮4 平面轴承5 滑块轴承6 调速柄7 调速螺杆8 调速螺母9 调速凸轮10 行星轮11 定环12 太阳轮13 压盘14 碟形弹簧15 输入轴带锥度的太阳轮(12)和压盘(13)被一组碟形弹簧(14)压紧,输入轴(15)与太阳轮用键联接,组成压紧的输入装置。
一组带锥度的行星轮(10)内侧夹在压紧的太阳轮与压盘之间,外侧夹在带锥度的定环(11)和调速凸轮(9)之间,输入装置转动时由于定环和调速凸轮固定不动,行星轮就沿定环作纯滚动,且绕输入轴作公转,通过行星摩擦轮的中心轴及滑块轴承(5)而带动行星架(2)及输出轴(1)转动。
调速时转动手轮,由手轮带动调速螺杆,使平面凸轮相对转动,产生轴向移动,从而均匀改变调速凸轮和固定环之间的间隔,最后改变了行星轮与太阳轮、压盘及固定环、调速凸轮摩擦处的工作半径,实现无级调速。
二、产品特点行星摩擦机械无级变速机,主要由压紧的主动装置、摩擦传动机构、调速控制机构组成。
它的主要优点:1、高强度:在加冲击负载逆转时,本机性能可靠,能精确地传动,无后座力,并有足够的强度。
2、变速范围大:变速范围为5,即输出速比可在1∶1 45至1∶1 75之间任意比。
3、调速精度高:调速精度为0 5~1转/分。
4、性能稳定:本机的传动部件都经过特殊热处理,并经精密加工。
接触和润滑良好、运行平稳、噪声低、寿命长。
5、结构紧凑:体积小,重量轻。
6、组合能力强:本机能与各种减速机组合,实现低速无级变速,因此它具有良好的适应性。
243MB系列行星摩擦机械无级变速机三、型号表示方法:安装方位减速比组合减速机型号(!一级齿轮减速)电机功率(不带电机时省略)电机代号(不带电机时省略)机座号安装方式("卧式、#立式)$%无级变速代号&'(!%)*&"+#四、性能曲线 效率-转速的关系 扭矩-转速的关系五、工况系数准确选择型号规格的核心是使选用的电机———变速器组与预计要求的负载和成本相适应。
什么是“无极变速传动”?常见的无极变速机构,一文全面介绍
什么是“无极变速传动”?常见的无极变速机构,一文全面介
绍
无极变速传动概述
无极变速传动概念:
无级变速传动是一种输出转速在一定范围内可以调节的独立工作单元。
无级变速传动分为电力无级变速传动、液力无级变速传动和机械无级变速传动。
电力无级变速的原理是改变电机的磁通、电压、电流或频率;液力无级变速传动的原理是改变液体的体积或液流的路径;机械无级变速传动的原理是改变某一构件的位置或尺寸。
无极变速传动类型:
从传动原理上划分,机械无级变速传动分为牵引力(摩擦力)式与机构传动式。
从结构上划分,机械无级变速传动分为定轴无中间滚动体式,中间滚动体定轴式和行星运动中间滚动体式。
本文仅介绍机械无级变速传动的类型、工作原理、传动特性与应用。
在某些生产工艺中,采用机械无级变速传动有利于简化传动的结构,提高生产率与产品质量,节约能源,便于实现自动控制。
37页内容全面介绍无级变速传动(文末有获取)
1000G机械领域设计资料内容概述。
无级变速箱工作原理
无级变速箱工作原理
无级变速箱(CVT)是一种能够连续无级变换传动比的变速装置。
其工作原理是通过使用两个变速驱动元件,分别是驱动轮和从动轮,它们之间通过一个电液控制系统进行连接。
驱动轮由发动机提供动力,通过一个金属链条或其他机械装置与输入引擎连接。
从动轮则通过一个相似的机械结构,与输出设备(例如车辆轮胎)相连。
两者之间有一个连续的金属带或链条,被称为传送带。
当发动机提供动力时,驱动轮开始旋转,并通过传送带传递动力到从动轮。
通过改变两个变速驱动元件的直径,可以调整传动比,从而使发动机转速和车辆速度匹配。
这些变速驱动元件通常由液体或者机械力来控制,从而实现无级变速。
液体无级变速箱使用液体来控制变速驱动元件的直径。
液体被注入一个液压回路中,通过控制压力来改变两个驱动元件的直径。
压力的变化可以通过油泵、阀门和传感器来控制,以确保驱动轮和从动轮之间的传动比始终保持最佳状态。
机械无级变速箱通过使用分析角度来改变变速驱动元件的直径。
这可以通过固定一个驱动轮,并通过连续的偏置机构将从动轮移动来实现。
偏置机构由电机或液压装置驱动,确保传动比平稳和无缝切换。
无级变速箱的优点是在转速范围内可以实现连续的无级变速,以满足不同运行条件下的动力需求。
它相对于传统的手动变速
器或自动变速器来说,更加顺畅和高效。
然而,由于其复杂的结构和控制系统,无级变速箱的维护成本通常较高,并且在高扭矩应用的情况下,可能会受到寿命的限制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图12.1 移动滚轮平盘式无级变速器12 机械无级变速机构12.1 概述无级变速传动是一种输出转速在一定范围内可以调节的独立工作单元,无级变速传动分为电力无级变速传动、液力无级变速传动和机械无级变速传动。
电力无级变速的原理是改变电机的磁通、电压、电流或频率;液力无级变速传动的原理是改变液体的体积或液流的路径;机械无级变速传动的原理是改变某一构件的位置或尺寸。
从传动原理上划分,机械无级变速传动分为牵引力(摩擦力)式与机构传动式。
从结构上划分,机械无级变速传动分为定轴无中间滚动体式,中间滚动体定轴式和行星运动中间滚动体式。
本书仅介绍机械无级变速传动的类型、工作原理、传动特性与应用。
在某些生产工艺中,采用机械无级变速传动有利于简化传动的结构,提高生产率与产品质量,节约能源,便于实现自动控制。
12.2 定轴无中间滚动体式机械无级变速传动12.2.1 正交轴无级传动定轴无中间滚动体式机械无级变速传动是结构相对简单的一种牵引力式无级变器。
图12.1为一种正交轴结构的移动滚轮平盘式无级变速器,通过滑键或花键将滚轮2装于输入轴1上,输入轴1向下压滚轮2,滚轮2与输出轴3上的圆盘之间产生摩擦力,滚轮2在水平方向由调速机构改变位置(如螺旋机构)。
设输入轴1的转速为ω1,输出轴3的转速为ω3,滚轮2的位置为R 3,滚轮2的直径为d 2,滚轮2与圆盘3之间无相对滑动时,输出轴3的转速ω3与传动比i 13分别为)112(/5.03123-= R d ωω)212()5.0/(/233113-== d R i ωω当R 3在一定范围内变化时,输出轴的转速得到调节,ω3与R 3成反比关系。
当轴1主动时,设滚轮2与圆盘3之间的正压力为N 23,两者之间的摩擦系数为f ,摩擦力F 23=N 23f ,则圆盘3获得的功率P 3=N 23fR 3ω3=N 23fR 3(0.5d 2ω1)/ R 3=0.5N 23fd 2ω1,不论R 3如何变化,即滚轮2在任何位置,其输出的功率P 3不变,称为恒功率型无级传动。
当轴1主动时,圆盘3获得的转矩T 3=N 23fR 3,T 3与R 3成正比。
当圆盘3主动时,轴1获得的功率P 1=N 23f (0.5d 2ω1)=N 23f (0.5d 2)R 3/(0.5d 2)ω3=N 23fR 3ω3,P 1与R 3、ω3成正比。
当圆盘3主动时,轴1获得的转矩T 1=0.5d 2N 23f ,不论R 3如何变化,即滚轮2在任何位置,轴1所得到的转矩T 1不变,称为恒转矩型无级传动。
该种无级变速器传递的功率可达4 KW ,机械效率在0.8~0.85之间,传动比在0.2~2.0之间。
12.2.2 相交轴锥盘环锥式无级传动图12.2为一种相交轴锥盘环锥式无级变速器。
锥盘2的半锥角为θ,通过滑键或花键将锥盘2P 图12.2 锥盘环锥式无级变速器 图12.3 锥盘环锥式无级变速器的机械特征3图12.4 光轴斜盘式无级变速器装于输入轴1上,输入轴1向下压锥盘2,锥盘2与输出轴3上的内圆环端面之间产生摩擦力,促使输出轴3转动。
锥盘2在其轴线方向由调速机构改变位置(如螺旋机构),设位置的改变量为S ,同时,输入轴1在垂直于自身轴线的方向上也产生附加的径向位移a ,θtan S a =。
当输入轴1的转速为ω1,锥盘2的初始接触半径为R 2,对应于位置改变量S 后的接触半径θtan 2t 2S R R -=,锥盘2与输出轴3上的内圆环端面之间无相对滑动时,输出轴3的转速ω3与传动比i 13分别为)312(/)tan (3123--= R S R ωθω)412()tan /(/233113--== θωωS R R i当S 在一定范围内变化时,输出轴的转速得到调节。
该种无级变速器传递的功率可达11 KW ,机械效率在0.5~0.92之间,传动比在0.25~1.15之间。
设P 3、T 3分别表示输出轴3的功率与转矩,则锥盘环锥式无级变速器的机械特征如图12.3所示。
12.2.3 光轴斜盘式无级传动图12.4为一种光轴斜盘式无级变速器。
它将输入转动转化为输出的往复移动。
光轴1只单向转动不沿轴向移动,三个轴承的内圆环以倾角为β压紧在光轴上,三个轴承的外圆环通过构件2连接在一起,当光轴1转动时,三个轴承带动构件2以及框架3沿一个方向移动,当移动一段距离时,三个轴承的倾角被改变为反方向的(换向装置未示出),于是框架3沿相反方向移动,如此反复,输出构件便作往复移动。
当三个轴承的倾角为β时,输出构件的移动速度V 2为 )512((m/s)/60000tan π112-= βn d V式中d 1为光轴1的直径,单位为mm ,n 1为光轴1的转速,单位为r/min 。
当β被调节时,输出构件的移动速度得到调节。
该种无级变速器主要用于电缆机械中。
12.3 定轴有中间滚动体式无级变速传动12.3.1 滚锥平盘式无级传动图12.5为一种型式的滚锥平盘式无级变速器。
输入轴1的转速为ω1,滚锥2被压紧在输入与输出轴端部的平盘之间,滚锥2作定轴转动,滚锥2的位置由调节机构实现。
设滚轮2与输入端盘的图12.7 钢球平盘式无级变速器 图12.8 钢球平盘式无级变速器的机械特征P接触点到输入轴的距离为R 1,滚轮2与输入端盘的接触半径r a ;滚轮2与输出端盘的接触点到输出轴的距离为R 3,滚轮2与输出端盘的接触半径r b ,滚轮2与两个端盘之间无相对滑动,则输出轴3的转速ω3与传动比i 13分别为)612()/()(3a 11b 3-⋅⋅= R r R r ωω)712()/(/1b 3a 3113-⋅⋅== R r R r i ωω当滚轮2在一定范围内变化时,输出轴的转速得到调节。
该种无级变速器传递的功率可达3 KW ,机械效率在0.77~0.92范围,传动比在0.17~1.46之间。
设P 3、T 3分别表示输出轴3的功率与转矩,则滚锥平盘式无级变速器的机械特征如图12.6所示。
12.3.2 钢球平盘式无级传动图12.7为一种型式的钢球平盘式无级变速器。
输入轴1的转速为ω1,钢球2被压紧在输入与输出轴端部的平盘之间,钢球2相对于自身的机架4作定轴转动,钢球2由位置调节机构改变水平位置。
设钢球2与输入盘的接触点到输入轴的距离为R 1,钢球2与输出盘的接触点到输出轴的距离为R 3,输入与输出轴之间的中心距为a ,a =R 1+R 3,a 为定值,钢球2与圆盘之间无相对滑动,则输出轴3的转速ω3与传动比i 13分别为 )812()/(/1113113--⋅=⋅= R a R R R ωωω)912(/)(//11133113--=== R R a R R i ωω当钢球2在一定范围内变化时,输出轴的转速得到调节。
该种无级变速器传递的功率可达3 KW ,机械效率小于0.8,传动比在0.05~1.5之间。
设P 3、T 3分别表示输出轴3的功率与转矩,则钢球平盘式无级变速器的机械特征如图12.8所示。
12.3.3 钢环分离锥盘式无级传动图12.5 滚锥平盘式无级变速器 图12.6 滚锥平盘式无级变速器的机械特征P图12.9 钢环分离锥盘式无级变速器3P 图12.10 钢环分离锥盘式无级变速器的机械特征(a) (c) (d)(b)30+∆b /tanα图12.9(a)、(b)为一种型式的钢环分离锥盘式无级变速器在不同传动比时的结构简图。
输入轴1的转速为ω1,钢环2被涨紧在输入与输出轴上的V 型槽之间,V 型槽的夹角为2α,钢环可以是整体式的,也可以是一节一节装配式的。
设钢环2与输入锥盘的初始接触点到输入轴的距离为R 10,钢环2与输出锥盘的初始接触点到输出轴的距离为R 30,如图12.9(a)所示。
当输入锥盘向外张开一段距离∆b 时,如图12.9(c)所示,R 10减小到R 10-∆b /tan α;与此过程相对应,输出锥盘向内缩小∆b 的距离,R 30增大到R 30+∆b /tan α,如图12.9(d)所示。
设钢环2与两个锥盘之间无相对滑动,则输出轴3的转速ω3与传动比i 13分别为)1012()tan //()tan /(301103-∆+∆-= αωαωb R b R)1112()tan //()tan /(/10303113-∆-∆+== ααωωb R b R i当∆b 在一定范围内变化时,输出轴的转速得到调节。
该种无级变速器传递的功率可达10 KW ,机械效率在0.75~0.9之间,传动比在0.31~3.2之间。
设P 3、T 3分别表示输出轴3的功率与转矩,则钢环分离锥盘式无级变速器的机械特征如图12.10所示。
该种型式的无级变速器在汽车变速箱中得到广泛应用[19]。
12.3.4 弧锥环盘式无级传动图12.11为一种型式的弧锥环盘式无级变速器。
输入轴1的转速为ω1,环盘2被压紧在输入与输出轴的弧锥上,环盘2的圆弧半径为R ,两段圆弧的中点A 、B 关于圆心O 的张角为2θ,环盘2关于转动中心O 的偏转角为δ,两弧锥1、3与环盘2的接触点A 、B 所对应的节径分别为d 1t 、d 2t ,设环盘2与两弧锥1、3之间无相对滑动,由图12.11得R 、θ、δ、d 1t 、d 2t 以及两环盘的中心距a 之间的几何关系为)1212(5.0cos cos sin sin 5.0t 1-=++ a R R d δθδθ)1312(5.0cos cos sin sin 5.0t 3-=+- a R R d δθδθ于是,输出转速ω3与传动比i 13分别为)1412()]cos(5.0/[)]cos(5.0[13-+----= ωδθδθωR a R a图12.13 菱锥式无级变速器 图12.14 菱锥式无级变速器的机械特征3P(b)(a)3图12.11 弧锥环盘式无级变速器 图12.12 弧锥环盘式无级变速器的机械特征3P)1512()]cos(5.0/[)]cos(5.0[//t 1t 33113---+-=== δθδθωωR a R a d d i当δ在[-δ0,δ0]之间变化时,输出轴的转速得到调节。
该种无级变速器传递的功率可达10 KW ,机械效率在0.90~0.95之间,传动比在0.22~2.2之间。
设P 3、T 3分别表示输出轴3的功率与转矩,则弧锥环盘式无级变速器的机械特征如图12.12所示。
12.3.5 菱锥式无级传动图12.13(a)为一种型式的菱锥式无级变速器。
输入轴1的转速为ω1,菱锥2被压紧在输入与输出轴端部的环状空间之间,菱锥2的轴线与输入轴1的轴线之间的夹角为α,菱锥2绕自身的轴线转动,菱锥2的水平位置由位置调节机构进行调节。
设菱锥2与输入轴环的接触点到输入轴线的距离为0.5d 1,菱锥2的接触半径为r 21;菱锥2与输出环的接触点到输出轴线的距离为0.5d 3,菱锥2的接触半径为r 23。