塑性力学基础知识共45页文档
塑性力学讲义
2)研究物体在不可避免地产生某些塑性变形后,对承载能力和(或)抵抗变形能力的影响。
3)研究如何利用材料的塑性性质以达到加工成形的目的。
§1.2两个基本实验
塑性力学研究的基本实验有两个。一个是简单拉伸实验,塑性力学的基本概念就是从一种理想化的拉伸实验曲线中起源并引伸出来,并把单轴的实验结果推广至三维空间;另一个是材料在静水压力作用下,物体体积变形的实验。这两个实验的结果是建立各种塑性理论的基础。
由1.15式可以看出,当P较小时,各杆处于弹性阶段,而第二杆的应力最大。当P力逐渐增大,时,桁架内将出现塑性状态。此时桁架能承受的最大弹性载荷,称为弹性极限载荷。我们用符号 来表示弹性极限载荷。
对应的A点位移为:
2、弹塑性阶段(P > Pe)
此时,杆2处于屈服阶段。
由于
所以
杆2虽然进入塑性流动阶段,但由于它的变形要和杆1及杆3协调,受到它们仍为弹性变形的约束,因此杆2的变形仍是有限的,桁架处于约束塑性变形阶段。
(5)随动强化
加载阶段使得正向屈服极限不断提高,反向屈服应力会降低。如图5中的EB和EB΄;但拉伸时的屈服应力和压缩时的屈服应力(的代数值)之差,是不变的。
(6)包氏效应
卸载后,如果进行反向加载(拉伸改为压缩)首先出现压缩的弹性变形,后产生塑性变形,但这时新的屈服极限将有所降低,即压缩应力应变曲线比通常的压缩试验曲线屈服得更早了(如图6所示)。这种由于拉伸时的强化影响到压缩时的弱化现象称为包氏(Bauschinger)效应。(一般塑性理论中都忽略它的影响)
(四)学习塑性力学的基本方法
塑性力学是连续介质力学的一个分支,故研究时仍采用连续介质力学中的假设和基本方法。
第十一章塑性力学基础知识
-11
当2=1时,=1
2.应变罗德参数:
第四节屈服条件
4.1一维问题屈服条件:
一维问题包括:杆系的拉压(桁架)问题、圆杆扭转问题、梁的纯弯曲问题。这些问题每一点的应力状态(在弹性和弹塑性阶段)主方向始终不变,且知道它们的方向,所以了解不同材料在单向杆件拉压的屈服条件就可以应用到上述其它问题。
得 , ;
最大弹性荷载
力P作用点的伸长为
(2)弹塑性解PpPPe:
P=Pe后,P可继续增大,而N1=sA不增加(a段进入塑性屈服,但b段仍处于弹性)
N2=P- N1=P-sA
力P作用点的伸长取决于b段杆的变形
,
(3)塑性解:
N1=sA,N2=sA
则最大荷载Pp=2sA——极限荷载
这时杆件变形显著增加,
2-3=2k围成正六面体
3-1=2k
k=s或k=s/2
在平面问题中:3=0,则Tresca条件为
1-2=2k、2=2k、1=2k
(2)Mises(米泽斯)屈服条件:
1913年德国力学家Mises对Tresca屈服条件进行修正,Tresca条件的不足是:
a.未考虑中间主应力的影响;
b.由六个平面方程(线性函数)构成屈服函数不光滑,在数学上处理不方便,因此Mises建议用一个圆柱面
时的等效应变增量:
这个等效应变增量de在建立弹塑性应力应变关系增量理论用到。
3.3罗德(Lode)参数:
1.应力罗德参数:
在应力莫尔圆中描述一点的
应力状态123,当1、3确
定,则最大圆半径确定(1-3)/2,
但2的变化可导致两个内圆的
比例或大小。这两个内圆的比例
或大小可由罗德参数描述。
《弹塑性力学》第十一章塑性力学基础
描述了塑性变形过程中应变和位移之 间的关系,是塑性力学的基本方程之 一。
塑性变形的增量理论
流动法则
描述了塑性变形过程中应力和应变增量之间的关系,是增量理论的核心。
屈服准则
描述了材料在受力达到屈服点时的行为,是增量理论的重要概念。
塑性变形的全量理论
全量应力和全量应变
描述了塑性变形过程中应力和应变的 状态,是全量理论的基本概念。
100%
材料性能
塑性力学为材料性能的描述提供 了理论基础,有助于深入了解材 料的变形和破坏行为。
80%
科学基础
塑性力学是连续介质力学的一个 重要分支,为研究物质宏观性质 的变化规律提供了科学基础。
塑性力学的发展历程
初创期
塑性力学作为独立学科始于20 世纪初,初期主要研究简单的 应力状态和理想塑性材料。
有限元法的优点在于其灵活性和通用性,可以处 理复杂的几何形状和边界条件,适用于各种类型 的塑性变形问题。
然而,有限元法在处理大规模问题时可能会遇到 计算效率和精度方面的问题,需要进一步优化算 法和网格划分技术。
边界元法在塑性力学中的应用
01
02
03
04
边界元法是一种仅在边界上离 散化的数值方法,通过将问题 转化为边界积分方程来求解。
发展期
随着实验技术的进步,塑性力 学在20世纪中叶得到了快速发 展,开始涉及更复杂的材料和 应力状态。
深化期
进入20世纪末至今,塑性力学 与计算机技术、先进材料等交 叉融合,研究领域不断扩大和 深化。
塑性力学的基本假设
02
01
03
连续性
材料内部是连续的,没有空洞或缝隙。
塑性变形不可逆
塑性变形发生后,不会消失或还原。
第九章塑性力学基础

§9 - 2
二、Mises屈服准则 Mises屈服准则
两个常用屈服准则
1913年 来拟合试验点,这就是所谓的Mises 1913年Von Mises 建议用 J 2 = C 来拟合试验点,这就是所谓的Mises ′ 屈服准则。该准则可写成: 屈服准则。该准则可写成:
(σ 1 − σ 2 ) 2 + (σ 2 − σ 3 ) 2 + (σ 3 − σ 1 ) 2 = 2σ s
1
§9 - 1 §9 - 2 §9 - 3
塑性变形的特点、假设、 塑性变形的特点、假设、力学模型 两个常用屈服准则 简单桁架的弹塑性分析
2
§9 - 1
一、基本实验
塑性变形的特点、假设、 塑性变形的特点、假设、力学模型
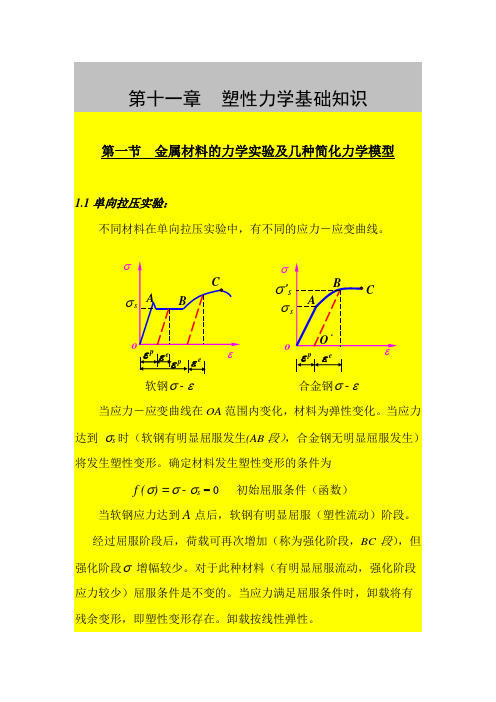
1、简单拉伸实验
σ s
2、静水压力实验:只有体积变形,没有形状变形 静水压力实验:只有体积变形, 只有弹性变形,没有塑性变形) (只有弹性变形,没有塑性变形)
5
§9 - 1
四、力学模型
塑性变形的特点、假设、 塑性变形的特点、假设、力学模型
3、线性强化模型
1、理想弹塑性模型
2、理想刚塑性模型 (双线性模型) 双线性模型)
4、线性强化刚塑性模型
5、幂强化模型
6
§9 - 2
一、Tresca屈服准则 Tresca屈服准则
两个常用屈服准则
1864年 通过一些列挤压试验来研究屈服准则时, 1864年,Tresca 通过一些列挤压试验来研究屈服准则时,发现产生 变形的金属表面有很细的痕迹, 变形的金属表面有很细的痕迹,而这些痕纹的方向和接近于最大切应力的 方向,因此, 方向,因此,他认为塑性变形可能是由于切应力所引起的晶格滑移而引起 Tresca认为当最大切应力达到某一极限值时,材料进入塑性状态, 认为当最大切应力达到某一极限值时 的。Tresca认为当最大切应力达到某一极限值时,材料进入塑性状态,开 始屈服。该准则可写成: 始屈服。该准则可写成:
塑性变形力学基础
第1篇塑性变形力学基础第1章应力分析与应变分析§应力与点的应力状态外力塑性加工是利用材料塑性,在外力作用下使材料发生塑性变形,制备具有必然外形尺寸及组织性能产品的一种加工方式。
外力是塑性加工的外因,它能够分成表面力和体积力两大类。
表面力即作用于工件表面的力,它有集中载荷和散布载荷之分,一样由加工设备和模具提供。
体积力那么是作用于工件每一质点上的力,如重力、磁力、惯性力等等。
在一样的加工进程中,体积力的作用远远小于表面力,因此往往忽略不计。
但在加速度较大的场合,体积力不能忽略。
例如锤上模锻,工件所受的惯性力向上,有利于材料填充上模,故常把形状复杂的型腔设置在上模。
对外力的研究,一样采纳理论力学的静力平稳法来分析,即便是体积力如惯性力,也可转化为一种等效“静力”,仍可采纳静力平稳法来分析。
内力内力是材料内部所受的力,它的产生来自于外界作用和物体内维持自身完整性的力。
外界作用能够是外力,也能够是物理作用、化学作用,如冷热不均。
内在力那么来自于组成物体的众多原子,它们老是试图维持彼此之间的距离不变。
当外界作用于物体时,迫使原子间距发生转变,而原子那么以力的形式与外界对抗,以恢复稳固位置,维持原有的间距。
所之内力是物体抗击外界作用而产生的于内部各部份之间彼此平稳的力。
研究内力时,第一须用假想截面剖切物体,暴露出内力,视其为外力,然后再运用理论力学的静力平稳方式来求解。
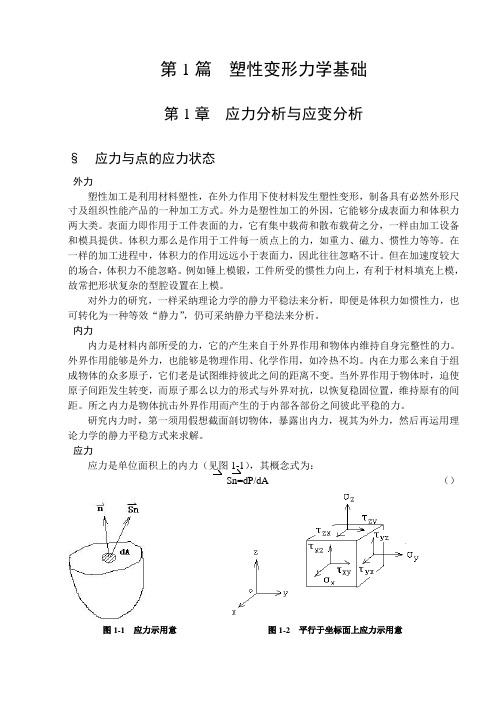
应力应力是单位面积上的内力(见图1-1),其概念式为:Sn=dP/dA ()图1-1 应力示用意图1-2 平行于坐标面上应力示用意其中dA 为假想截面某处的微面积,d P 为微面积上“作用”的内力。
Sn 为力矢量。
能够将 Sn 分解成平行于dA 外法线n 向的正应力n σ和“作用”在dA 内的切应力 n τ或二个正交的切应力。
专门是,当dA 别离为平行于直角坐标系下三个坐标面时,其应力分解如图1-2所示。
每一个应力分量的符号带有两个下角标。
塑性力学基础知识
9.4 (弹)塑性本构关系的几个关键点
1、什么时候塑性开始产生? 即塑性条件,初始屈服条件,或初始屈服准则。
复杂应力情形呢?
应力空间,主应力空间
屈服函数!
屈服面
9.4 (弹)塑性本构关系的几个关键点
2、什么是后继屈服条件?
1. 后继屈服条件的概念
什么是后继屈服? 后继屈服条件的一般形式?
简单拉伸:
弹性力学是我们研究塑性力学的基础! 仍然要记住,弹塑性力学也是以数学函数,也就 是数学场为研究对象的,可以研究整个区域内的力 状态和变形状态。
9.4 (弹)塑性本构关系的几个关键点
1、什么时候塑性开始产生? 即塑性条件,初始屈服条件,或初始屈服准则。
(a)理想弹塑性材料
一维问题-单向应力情形
(c) 线性硬化弹塑性材料
s A
A1 1
C C1
B B1
o εA
εB εC ε
可见,弹塑性问题与加载路径有关。
9.3 (弹)塑性力学VS.弹性力学
1、问题的来源
同弹性力学相同!
9.3 (弹)塑性力学VS.弹性力学
2、研究任务
研究由于载荷或者温度改变,弹塑性体内 部所产生的位移、变形和应力分布等。
为解决工程结构的强度,刚度和稳定性问 题作准备。
塑性力学则研究它们在塑性变形阶段的力学 响应。
弹塑性力学
9.2 应力-应变曲线
1、实际试验资料
9.2 应力-应变曲线
1、实际试验资料
9.2 应力-应变曲线
2、弹塑性变形的特 点
(1)存在一个从弹性 进入塑性的分界。
(2)在塑性阶段卸载, 然后再加载,加载路径 几乎沿着卸载路径回到 原来的卸载点继续加载。 换句话说,这个卸载点 成为了新的弹性-塑性的 界限。
塑性力学知识点

1 / 12
1. 在主应力空间内,过任一点(代表某物理点的应力状态)作一个特殊的微截面,该微截面 的法向与三个应力主轴夹角相等;每个象限作一个,则形成一个封闭的正八面体,这 8 个微截面上的应力称八面体应力。 2. 八面体(8 个微截面上的)正应力 oct m ,表征应力状态的球量部分,与弹性体积变形 有关。 3. 八面体(8 个微截面上的)剪应力 oct
第一章 应力状态(与应变状态)
1. 材料连续、均匀。 2. 静水应力只引起弹性的体积变形、不影响塑性剪切变形(岩土、软金属不适用) 。 3. 温度不高时忽略流变(蠕变、松弛…)效应,应变率不高时忽略应变率效应。
1. 指一点附近的受力情况,即过该点的所有微截面上的应力大小和方向(应力矢量) 。 2. 注意到任意截面的应力矢量可以用三个特殊微分面上的 9 个应力分量 (6 个独立) 来表征。
2. Lode 参数:由上式反推,
1
1
2 2 ( 1 3 ) ,或 3 tan( ) . 1 3
2 / 12
3. Lode 角:应力状态矢在 π 平面的投影 ρ 与 x 轴的夹角,
1 3
arctan( ) .
x-y-L
1. 将应力主轴 σ1、σ2、σ3 向 π 平面投影,得线性相关的三个偏应力轴 S1、S2、S3;在 π 平面 上,取 S2 为 y 轴,其垂直方向为 x 轴;在 π 平面外,取静水轴 L 为第三轴,则得正交 坐标系 x-y-L(由 σ1-σ2-σ3 坐标系旋转而得) 。 2. 传统塑性力学只关心应力偏量(π 平面上的应力状态) ,即只需要用到 x-y 坐标系,比如 Lode 角正是应力偏矢与 x 轴的夹角。
忽略静水应力对屈服的影响时,可简化为 2 个应力偏量不变量的函数:
塑性力学知识点
《塑性力学及成形原理》知识点汇总第一章绪论1.塑性的基本概念2.了解塑性成形的特点第二章金属塑性变形的物理基础1.塑性和柔软性的区别和联系2.塑性指标的表示方法和测量方法3.磷、硫、氮、氢、氧等杂质元素对金属塑性的影响4.变形温度对塑性的影响;超低温脆区、蓝脆区、热脆区、高温脆区的温度范围补充扩展:1.随着变形程度的增加,金属的强度硬度增加,而塑性韧性降低的现象称为:加工硬化2.塑性指标是以材料开始破坏时的塑性变形量来表示,通过拉伸试验可以的两个塑性指标为:伸长率和断面收缩率3.影响金属塑性的因素主要有:化学成分和组织、变形温度、应变速率、应力状态(变形力学条件)4.晶粒度对于塑性的影响为:晶粒越细小,金属的塑性越好5.应力状态对于塑性的影响可描述为(静水压力越大):主应力状态下压应力个数越多,数值越大时,金属的塑性越好6.通过试验方法绘制的塑性——温度曲线,成为塑性图第三章金属塑性变形的力学基础第一节应力分析1.塑性力学的基本假设2.应力的概念和点的应力状态表示方法3.张量的基本性质4.应力张量的分解;应力球张量和应力偏张量的物理意义;应力偏张量与应变的关系5.主应力的概念和计算;主应力简图的画法公式(...3.-.14..)应力张量不变量的计算...........122222223()2() x y zx y y z z x xy yz zx x y z xy yz zx x yz y zx z xyJ J Jσσσσσσσσστττσσστττστστστ=++=-+++++=+-++公式(...3.-.15..)应力状态特征方程.........321230J J J σσσ---= (当已知一个面上的应力为主应力时,另外两个主应力可以采用简便计算公式(...3.-.35..).的形式计算)6.主切应力和最大切应力的概念计算公式..(.3.-.25..).最大切应力.....)(21min max max σστ-= 7.等效应力的概念、特点和计算主轴坐标系中......公式..(.3.-.31..).8σ=== 任意坐标系中......公式..(.3.-.31a ...).σ=8.单元体应力的标注;应力莫尔圆的基本概念、画法和微分面的标注 9.应力平衡微分方程 第二节 应变分析1.塑性变形时的应变张量和应变偏张量的关系及其原因 2.应变张量的分解,应变球张量和应变偏张量的物理意义 2.对数应变的定义、计算和特点,对数应变与相对线应变的关系 3.主应变简图的画法 3.体积不变条件公式(...3.-.55..).用线应变....0x y z θεεε=++=;用对数应变.....(主轴坐标系中)........0321=∈+∈+∈ 4.小应变几何方程公式(...3.-.66..).1;()21;()21;()2x xy yx y yzzy z zx xz u u v x y x v v w y z yw w u z x zεγγεγγεγγ∂∂∂===+∂∂∂∂∂∂===+∂∂∂∂∂∂===+∂∂∂ 第三节 平面问题和轴对称问题1.平面应变状态的应力特点;纯切应力状态的应力特点、单元体及莫尔圆公式(...3.-.8.6.).12132()z m σσσσσ==+= 第四节 屈服准则1.四种材料的真实应力应变曲线 2.屈雷斯加屈服准则 公式(...3.-.96..).max 2s K στ== 3.米塞斯屈服准则公式(...3.-.10..1.).2222222262)(6)()()(K s zx yz xy x z z y y x ==+++-+-+-στττσσσσσσ 2221323222162)()()(K s ==-+-+-σσσσσσσ公式(...3.-.102...).s sσσσσ==== 4.两个屈服准则的相同点和差别点5.13s σσβσ-=,表达式中的系数β的取值范围 第五节 塑性变形时应力应变关系 1.塑性变形时应力应变关系特点 2.应变增量的概念,增量理论公式(...3.-.125...).'ij ij d d εσλ= 公式(...3.-.129...).)](21[z y x x d d σσσσεε+-=;xy xy d d τσεγ23= )](21[z x y y d d σσσσεε+-=;yz yz d d τσεγ23=)](21[y x z z d d σσσσεε+-=;zx zx d d τσεγ23=3.比例加载的定义及比例加载须满足的条件 第六节 塑性变形时应力应变关系 1.真实应力应变曲线的类型第四章 金属塑性成形中的摩擦1.塑性成形时摩擦的特点和分类;摩擦机理有哪些?影响摩擦系数的主要因素 2.两个摩擦条件的表达式3.塑性成形中对润滑剂的要求;塑性成形时常用的润滑方法 第五章 塑性成形件质量的定性分析 1.塑性成形件中的产生裂纹的两个方面2.晶粒度的概念;影响晶粒大小的主要因素及细化晶粒的主要途径 3.塑性成形件中折叠的特征 第六章 滑移线场理论简介1.滑移线与滑移线场的基本概念;滑移线的方向角和正、负号的确定 2.平面应变应力莫尔圆中应力的计算;公式(...7.-.1.).ωτωσσωσσ2cos 2sin 2sin K K K xy m y m x =+=-= 3.滑移线的主要特性;亨盖应力方程公式(...7.-.5.).2ma mb ab K σσω-=± 4.塑性区的应力边界条件;滑移线场的建立练习题一、应力1、绘制⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=410140002ij σ的单元体和应力莫尔圆,并标注微分面。