自测试题(三)答案西北工业大学鱼雷自动控制系统试卷
自动控制原理课后习题答案 西北工业大学出社
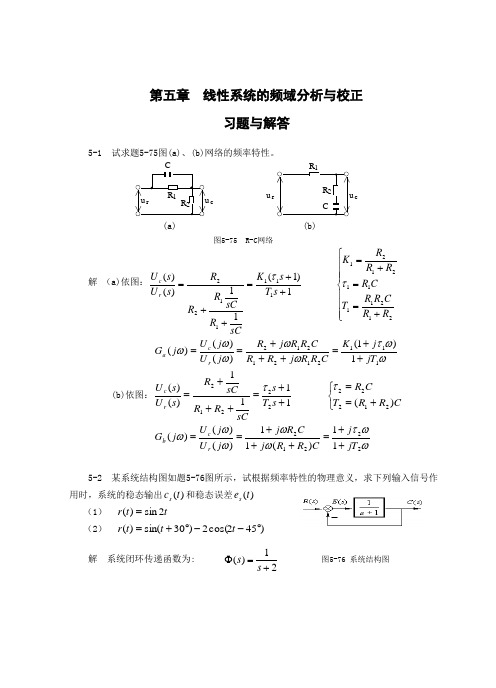
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
u rR 1u cR 2CCR 2R 1u ru c(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sCR sC R R R s U s U r c ττ ωωτωωωωω11121212121)1()()()(jT j K C R R j R R C R R j R j U j U j G r c a ++=+++==(b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sCR s U s U r c)(1111)()(2122222212ττ ωωτωωωωω2221211)(11)()()(jT j C R R j C R j j U j U j G r c b ++=+++==5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s (1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕο4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(οο-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(ο+=-Φ=t t j r e e e m ss ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωωο5.26)21arctan()1(45.055)1(-=-===Φj j ϕ ο4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m s ϕϕ+-⋅Φ-++⋅Φ=οο)902cos(7.0)4.3sin(4.0οο--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m s ϕϕ+-⋅Φ-++⋅Φ=οο )6.262cos(58.1)4.48sin(63.0οο--+=t t5-3 若系统单位阶跃响应 )0(8.08.11)(94≥+-=--t e e t h tt试求系统频率特性。
西北工业大学自动控制期末试卷
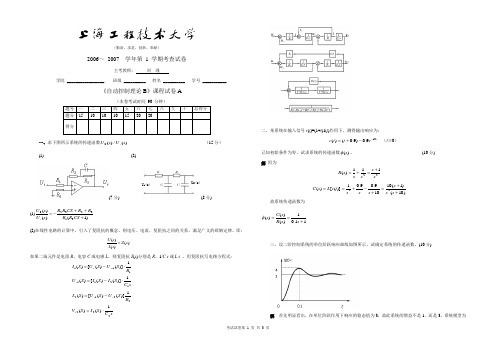
考试试卷第 1 页 共 3页(勤奋、求是、创新、奉献)2006~ 2007 学年第 1 学期考查试卷主考教师: 刘 瑾学院 _________________ 班级 __________ 姓名 __________ 学号 ___________《自动控制理论B 》课程试卷A(本卷考试时间 90 分钟)题号 一 二 三 四 五 六 七 八 九 十 总得分 题分 15 10 10 10 15 20 20得分一、求下图所示系统的传递函数)(/)(0s U s U i (15分) (1) (2)(7分)Uo(s)U i (s)(8分)(1))1()()(3132320+++-=CS R R R R CS RR s U s U i (2)在线性电路的计算中,引入了复阻抗的概念,则电压、电流、复阻抗之间的关系,满足广义的欧姆定律。
即:)()()(s Z s I s U = 如果二端元件是电阻R 、电容C 或电感L ,则复阻抗Z (s )分别是R 、1/C s 或L s 。
用复阻抗写电路方程式:sC S I S V R S U S U S I sC S I S I S U R S U S U S I c c c c C r 222221212111111)()(1)]()([)(1)]()([)(1)]()([)(⋅=-=⋅-=⋅-=二、某系统在输入信号r(t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
(10分) 解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ三、设二阶控制系统的单位阶跃响应曲线如图所示。
西北工业大学智慧树知到“电气工程及其自动化”《电力拖动自动控制系统》网课测试题答案卷4

长风破浪会有时,直挂云帆济沧海。
住在富人区的她全文为Word 可编辑,若为PDF 皆为盗版,请谨慎购买! 西北工业大学智慧树知到“电气工程及其自动化”《电力拖动自动控制系统》网课测试题答案(图片大小可自由调整) 第1卷 一.综合考核(共10题) 1.当可逆系统进入制动状态时,直流PWM 功率变换器把机械能变为电能回馈到直流侧,由于二极管整流器导电的单向性,电能不可能通过整流器送回交流电网,只能向滤波电容充电,使电容两端电压升高,称作泵升电压。
()A.错误B.正确2.比例积分控制综合了比例控制和分控制两种规律的优点,又克服了各自的缺点,扬长避短,互相补充。
() A.错误B.正确3.控制系统的动态性能指标包括对给定输入信号的跟随性能指标和对扰动输出信号的抗扰性能指标。
() A.错误B.正确4.异步电动机的稳态数学模型包括稳态时的等值电路和机械特性。
() A.错误B.正确5.闭环调速系统可以获得比开环调速系统硬得多的稳态特性,为此所需付出的代价是需增设运算放大器以及转速检测装置。
()A.错误B.正确6.积分控制可以使直流调速系统在无静差的情况下保持恒速运行,实现无静差调速。
()A.错误B.正确7.静差率和机械特性硬度是一回事。
() A.错误B.正确8.比例积分控制综合了比例控制和积分控制两种规律的优点,比例部分能快速响应控制作用,积分部分能最终消除稳态偏差。
()A.错误B.正确9.逻辑无环流可逆调速系统任何时候都不会出现两组晶闸管同时封锁的情况。
()A.错误B.正确10.通过坐标系转换,可以找到与交流三相绕组等效的直流电动机模型。
()A.错误B.正确第1卷参考答案 一.综合考核 1.参考答案:B2.参考答案:B3.参考答案:A4.参考答案:B5.参考答案:B6.参考答案:B7.参考答案:A8.参考答案:B9.参考答案:A10.参考答案:B。
自测试题(三)西北工业大学鱼雷自动控制系统试卷
诚信保证
本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
本人签字:
编号:
西北工业大学考试试题(卷)
20XX-20XX学年第X学期
开课学院航海学院课程鱼雷自动控制系统学时32
考试日期考试时间2小时考试形式(
闭)(
C
)卷
题号一二三四五六七总分得分
考生班级学号姓名
一、填空题(每空1分,共30分)
1.鱼雷的弹道包括、、、、、六个阶段。
2.鱼雷自动控制系统的主要战术技术指标包括、、
、四个方面。
3.鱼雷所受的偏航力矩与流体动力参数、、
有关。
4.在控制规律中加入角速度信号,可以系统的阻尼。
5.航行误差与平衡直舵角成,与航向控制系统的传动比成。
平衡直舵角又与直航衡倾角成,所以横倾角的存在引起了航行偏差,而且航向偏差随横倾角的增大而增大。
6.通常,鱼雷纵向运动的弹道主要有两种形式,和。
7.按控制规律来讲,鱼雷深控系统主要有两种:具有信号的深控系统
2. 命题教师和审题教师姓名应在试卷存档时填写。
共2页第1页
西北工业大学命题专用纸。
西北工业大学本科自动控制原理期末试题(一)
G
% £¤ÔpÊU786qr³3´µG L (ω ) zÍÎÏdÐp6³3´µG L @A 25 B C ï 3 ðñ@9 EÄ786qr0123 G(S),HòÊÖIa P þ 1ÿ EÏdÐp60123G ( S ) P þ 2ÿ §EÏdP786qr³3´µG L (ω ) DHòÊÖIa T þ 3ÿ
% B % N(S)+M(S) = 0 i9sAUVW78 % D% SAUVW78D0123s G(S) DVW0123s H(S) DBCH 4% g6bc E(S)iBEHg6bc E ( S ) 7@
*
B % E (S ) = H (S ) ⋅ E (S ) % E (S ) = H (S ) ⋅ E (S ) C % E (S ) = G(S ) ⋅ H (S ) ⋅ E (S ) D % E (S ) = G(S ) ⋅ H (S ) ⋅ E (S ) d@1. efghijklmfUpDnfo)pq%rstuvkEwT fxyz{fxy|}(hn~QT 2. e 4 A
G3
C(S)
H1
ï1
2
%78íîï 2 ðñDnò786Õøùσ % zøúQt û
s
ôõ 10 ö ÷ ó
R(S)
25 s(s + 5)
C(S)
ï2
3
üýAUVW786qr0123s
G(S ) H (S ) =
*
ôõ 15 ö ÷ ó
R£ 6©ª« þ ¯òE@¤¥¾%i¦§ 6¨¾© ÿ ¡ P þ 1ÿ K ¢ 0 ~ ∞ ò78XHvsYQqr¸¹ K 6°T þ 2ÿ
K * ( S + 1) S ( S-3)
4
3
西北工业大学 研究生考试真题+习题 自动控制原理

2002年硕士研究生入学考试试题试题名称:自动控制原理 试题编号:541说明:所有试题一律写在答题纸上 共 3 页 第 3 页221-=K , 1)(=s H2002年硕士研究生入学考试试题试题名称:自动控制原理试题编号:541说明:所有试题一律写在答题纸上共 3 页第 3 页2002年硕士研究生入学考试试题试题名称:自动控制原理试题编号:541说明:所有试题一律写在答题纸上共 3 页第 3 页试题名称:自动控制原理 试题编号: 427试题名称:自动控制原理 试题编号: 427试题名称:自动控制原理 试题编号: 427西北工业大学2004年硕士研究生入学考试试题试题名称:自动控制原理(A 卷) 试题编号: 427 说 明:所有答题一律写在答题纸上 第 1 页 共 3 页1.(25分)已知系统结构图如图1所示(1) 确定使系统稳定的参数t K K ~0的取值范围,并在t K K ~0平面上表示出来;(2) 要求在2)(2t t r =作用下系统的稳态误差0=ss e ,试确定)(s G c 的表达式。
2.(25分)系统结构图如图2所示(1) 绘制当∞→变化时的系统根轨迹(求出渐近线,分离点,与虚轴交点),确定使系统稳定的开环增益=00K K 的取值范围;(2) 若已知闭环系统的一个极点为11-=λ,试确定系统的闭环传递函数。
试题名称:自动控制原理(A 卷) 试题编号: 427 说 明:所有答题一律写在答题纸上 第 2 页 共 3 页3.(25分)某单位反馈的最小相角系统,其开环对数幅频特性如图3所示。
(1) 写出系统开环传递函数)(s G 表达式; (2) 求系统的截止频率c ω和相角裕度γ。
[ 注:振荡环节的谐振频率221ξωω-=n r ,谐振峰值2121ξξ-=r M ]4.(25分)系统结构图如图4所示,被控对象的传递函数为)101.0)(11.0()(0++=s s s Ks G(1) 当1)(=s G c 时,若要求系统的静态误差系数100=v ,试判断系统此时是否稳定;K (2) 令100=K ,为使系统获得大于︒30的相角裕度,采用校正装置 1005.0105.0)(++=s s s G c试验证校正后系统是否满足要求。
西北工业大学自动控制原理考试试题汇总

装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题A (56学时)答案及评分标准一、答案:A C B B A D C D C B评分标准:每小题2分二、1、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分)2、答案:%16.3 1.4s σ=s =% t 评分标准:10分,每一问5分3、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<15评分标准:15分 第一问10分,第二问5分4、答案:(1) (2) K=80K <<评分标准: 15分 第一问8分,第二问7分 5、答案:(1) ()(1)(11020K G s s ss ++=)033.4γ=- K=100(2) 3.1251()1001c s G s s ++=(3) 0100(3.1251)()(1)(1)(10011020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=) 评分标准:25分 第一问10分,第二问5分,第三问10分装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题B (56学时)答案及评分标准一、 答案:C D B A B C A D C B评分标准:每小题2分二、1、答案:%16.3 1.4s σ=s =% t评分标准:10分,每一问5分2、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<评分标准:15分 第一问10分,第二问5分 3、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分) 4、答案: (1) ()(1)(11020K G s s s s )++= K=10033.4γ=-(2) 3.12511001c S G S ++=(3) 0100(3.1251)()(1)(1)(1001)1020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=评分标准:25分 第一问10分,第二问5分,第三问10分5、 答案:(1) (2) K=80K <<15评分标准: 15分 第一问8分,第二问7分诚信保证本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
西北工业大学22春“电气工程及其自动化”《电力拖动自动控制系统》期末考试高频考点版(带答案)试卷号3
西北工业大学22春“电气工程及其自动化”《电力拖动自动控制系统》期末考试高频考点版(带答案)一.综合考核(共50题)1.比例积分控制综合了比例控制和分控制两种规律的优点,又克服了各自的缺点,扬长避短,互相补充。
()A.错误B.正确参考答案:B2.以频率与期望的输出电压波相同的正弦波作为调制波,以频率比期望波高得多的等腰三角波作为载波。
()A.错误B.正确参考答案:B3.闭环调速系统可以获得比开环调速系统硬得多的稳态特性,为此,所需付出的代价是需增设转速检测装置以及运算放大器装置。
()A.错误B.正确参考答案:B4.带电流截止负反馈的转速闭环系统不是单闭环系统。
()A.错误B.正确参考答案:A5.在V-M系统中,设置平波电抗器可以抑制电流脉动。
()参考答案:B6.与V-M相比PWM系统具有更高的工作频率,电流脉动幅值小,所以PWM系统的平波电抗器要小于V-M 系统,电枢回路总电感减小,系统的电磁时间常数会减小,进而会获得更好的系统快速性和更小的超调量。
()A.错误B.正确参考答案:B7.常用的交流PWM有三种控制方式,分别是SPWM、CFPW、SVWM。
()A.错误B.正确参考答案:A8.弱磁控制时电动机的电磁转矩属于恒功率性质,只能拖动恒功率负载而不能拖动恒转矩负载。
()A.错误B.正确参考答案:A9.配合控制有环流可逆系统的制动过程分本组逆变、它组制动阶段。
()A.错误B.正确参考答案:B10.逻辑无环流可逆调速系统任何时候都不会出现两组晶闸管同时封锁的情况。
()参考答案:A11.异步电动机的稳态数学模型包括稳态时的等值电路和机械特性。
()A.错误B.正确参考答案:B12.当异步电动机在基频(额定频率)以下运行时,如果磁通太弱,没有充分利用电机的铁心,是一种浪费。
()A.错误B.正确参考答案:B13.电流脉动产生转矩脉动,为了避免或减轻这种影响,须采用抑制电流脉动的措施。
()A.错误B.正确参考答案:B14.常用的抗扰性能指标为动态降落和恢复时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
20XX-20XX学年第X学期自动控制系统
C卷评分标准
一、填空题(每空1分,共30分)
1.空中弹道;初始非控弹道;搜索弹道;导引弹道;末攻击弹道;再搜索弹道2.俯仰角θ;偏航角ψ;横滚角ϕ;攻角α;侧滑角β;弹道倾角Θ;弹道偏角ψ;倾斜角Φ
δ
3.鱼雷的速度;侧滑角β;直舵偏角
r
4.增加
5.正比;反比;正比
6.定深航行;定角爬潜
7.俯仰角;垂直速度;垂直加速度
8.自由角;侧滑角
9.深度;俯仰角
10.定轴;进动
11.俯仰角;横滚角
二、简答题(每小题6分,共24分)
1、液压舵机是以高原油为能源的执行机构。
它和电动舵机、气动舵机相比,具
有功率增益大、转动惯量小,输出力矩大,运转平稳、快速性好、结构紧凑、重量轻、体积小、灵敏度高、控制功率小和承受负载大等优点。
2、自由角设定误差的影响、航速变化的影响、制造公差的影响、回旋运动的影
响等。
3、串联校正比反馈校正简单,也比较易于对信号进行各种必要形式的变换。
反馈校正所需元件数较串联校正为少,反馈信号通常由系统输出端或放大器输出级供给,信号是从高功率点传向低功率点,一般无线附加放大器。
此外反馈校正尚可消除系统原有部分参数波动对系统性能的影响。
4、鱼雷没有横倾时,自导系统的水平波束处于水平位置,如果鱼雷存在横倾角,
自导波束也随之转动了同一角度,从而使某些波束(多波束系统)或波束的
某部分角度指向海底或海面,这样就增大了对混响和鱼雷自噪声的接受。
为了使自导系统不致产生误动作,就需要提高门限电平。
鱼雷可能出现的横倾越大,门限电平需要越高。
而门限电平的提高,意味着自导作用距离的降低。
所以,在一定技术水平条件下,横倾的存在将导致自导系统作用距离的减小,或者说,在维持作用距离不变的条件下,必须降低其它技术指标,如降低鱼雷的航行速度或使系统复杂化。
5、(1)稳定雷体轴在空间的角位置或角速度;
(2)改善雷体角运动的阻尼特性,提高其过渡过程的品质;
(3)稳定鱼雷的静态传递系数及动态特性;
(4)保证鱼雷质心运动的稳定性
三、(20分)
四、(20分)
为了比较精确地定量分析鱼雷在各种条件下控制系统的过渡过程,一般可以采用计算机仿真的方法进行研究。
把实际系统的运动规律用适当数学模型表达出来,它们通常是一组微分方程或差分方程。
然而任何数学模型都是对实际系统的近似描述,于系统的真实情况总有一定的差别。
但是,完全用实际系统进行分析研究,不仅要花费大量的人力、物力、试验周期很长,而且要大量记录所需的数据也很困难,特别是不能直接观察和掌握系统的运行发展过程,一旦系统出现故障、失稳,往往造成是否严重的损失。
因此,实际研究工作中,发展了所谓半实物仿真的方法。
就是将系统的一部分用实际装置,另一部分用数学模型在计算机上运行,并用适当的实验设备将实际装置与计算机连接起来。
这是一种十分重要的实验室研究方法。
Γ0ξ>Γ0ξ<Γ0ξ>⎩ξξ⎧⎨相同ξ<⎧相反ξ(x )=0
图示系统就是一种半实物仿真系统。
其中自动驾驶仪采用实物,鱼雷运动的动力学特性采用数学模型在计算机上运行,再用运动模拟转台和运动伺服系统将两者联系起来。
对于深度控制来说,由计算机求解鱼雷的纵向运动方程组,并将计算出的鱼雷深度输送给DAV11(D/A转换器),通过接口控制台将深度信号送至水压仿真器,自动驾驶仪就会得到深度信号。
同时,计算机解算出鱼雷的姿态,通过转台控制柜来控制三轴转台,模拟鱼雷的俯仰运动,装在三轴转台上的自动驾驶仪就可以感受到鱼雷的纵向姿态,并根据控制规律操纵横舵机,横舵机的动作由舵角传感器来感知,舵角信号以电压的形式返回到计算机,这样就形成了鱼雷纵向闭环控制系统。
与此同时,计算机将计算的鱼雷运动参数也以电压的形式送给显示和记录装置。
横向运动的仿真过程与纵向运动相似。