方位角数字问题修订版
坐标方位角计算例题
坐标方位角计算例题坐标方位角是指从参考方向(通常是北方)起始,顺时针方向到达某个点的角度。
为了更好地回答你的问题,我将提供一个计算坐标方位角的例题,并从多个角度进行解答。
假设有两个点A和B的坐标分别为A(2, 3)和B(5, 7),我们需要计算从A点到B点的方位角。
方法一,使用三角函数。
首先,我们可以使用三角函数来计算方位角。
根据三角函数的定义,我们可以得到以下公式:方位角 = arctan((yb-ya)/(xb-xa))。
其中,ya和yb分别代表点A和点B的纵坐标,xa和xb分别代表点A和点B的横坐标。
代入坐标值,我们可以得到:方位角 = arctan((7-3)/(5-2)) = arctan(4/3) ≈ 53.13°。
方法二,使用向量。
另一种计算方位角的方法是使用向量。
我们可以将A点和B点看作是从原点出发的向量,然后计算两个向量的夹角。
首先,我们需要计算向量AB的分量。
向量AB的横坐标分量为5-2=3,纵坐标分量为7-3=4。
然后,我们可以使用向量的内积公式来计算夹角:cosθ = (A·B) / (|A| |B|)。
其中,A·B表示向量A和向量B的内积,|A|和|B|分别表示向量A和向量B的模。
代入坐标值,我们可以得到:A·B = (3 3) + (4 4) = 9 + 16 = 25。
|A| = √(3^2 + 4^2) = √(9 + 16) = √25 = 5。
|B| = √(3^2 + 4^2) = √(9 + 16) = √25 = 5。
因此,cosθ = 25 / (5 5) = 25 / 25 = 1。
夹角θ = arccos(1) = 0°。
根据向量的性质,夹角θ的正负表示方位角的方向。
由于A点到B点是顺时针方向,所以方位角为0°。
综上所述,从点A(2, 3)到点B(5, 7)的方位角可以通过三角函数计算得到约为53.13°,也可以通过向量计算得到0°。
初中九年级数学下册《方位角》教案及反思
初中九年级数学下册《方位角》教案及反思一、教学目标1.了解方位角的含义,掌握方位角的计算方法。
2.能够用方位角表示地理位置及移动方向。
3.培养学生的空间想象力和计算能力。
二、教学重难点1.方位角的含义和计算方法。
2.如何将方位角应用于实际问题中。
三、教学内容1.方位角的概念和计算方法。
2.应用方位角进行定位和导航。
3.应用方位角解决实际问题。
四、教学过程1. 感知新知识•展示一张地图,让学生观察地图上的标志物并将其用简单的语言描述出来,引导学生思考方位角的概念。
2. 知识点讲解•向学生简要介绍方位角的概念和计算方法(以顺时针夹角为正方向)。
•分别讲解“绝对角”和“相对角”两个概念,并通过实例让学生理解两者的区别。
3. 练习题解析•指导学生完成练习题,同时解答他们在练习中遇到的问题。
•根据学生的反应情况,加深他们对方位角的理解。
4. 实践应用•引导学生应用方位角进行定位和导航。
•给学生提供一些有趣的情景(如游戏场景、旅行场景等),让他们尝试使用方位角解决问题。
5. 总结回顾•向学生提出反思问题,引导他们对本节课所学习的知识进行总结回顾。
•对在学习过程中遇到的疑惑和问题进行解答。
五、教学反思本节课采用了启发式教学方法,通过展示地图和实际应用等方式激发学生的兴趣,使他们更加容易理解和掌握方位角这一难点知识。
在教学中,学生的理解和反应都非常积极,他们也能够通过课上练习解决一些实际问题,达到了预期的教学目标。
在教学过程中,也发现了一些不足之处。
例如,部分学生在初次接触到方位角时理解上有些困难,需要教师多次解释和演示。
在讲解“绝对角”和“相对角”这两个概念时,也需要教师更加清晰地阐述两者的区别。
总的来说,本节课的教学效果较为良好,但也需要将不足之处纳入后续的教学计划中,不断改进教学方法,提高教学质量。
《方位角问题》课件

目录
• 方位角的基本概念 • 方位角的应用 • 方位角的计算实例 • 方位角问题解析 • 方位角问题的实际应用
01 方位角的基本概念
定义
01
02
03
方位角
指从正北方向顺时针转到 目标方向线的夹角,范围 在0°到360°之间。
真方位角
以真北方向为基准,顺时 针旋转至目标方向线的夹 角。
航海学
船舶导航
在航海学中,方位角是船舶导航 的重要参数之一,通过测量和计 算船只相对于不同地标的方位角 ,可以确定船只的位置和航向。
海上交通控制
海上交通控制中心通过监测船舶的 方位角变化,可以判断船舶的航行 轨迹和航向,确保海上交通的安全 和有序。
海洋调查
海洋调查船利用方位角来定位和测 量海洋参数,如海流、潮汐等。
掌握基本概念
了解和掌握方位角的基本 概念和计算方法是解决方 位角问题的关键。
熟练使用工具
使用量角器、罗盘等工具 进行测量和计算,可以提 高计算的准确性和效率。
实践应用
通过实践应用,如地图阅 读、导航等,可以加深对 方位角概念的理解,并提 高解决实际问题的能力。
05 方位角问题的实际应用
军事应用
1 2 3
航空学
飞机导航
航空飞行中,飞机需要精确的导 航信息来确保安全飞行,方位角 是飞机导航系统中的重要参数之
一。
机场调度
机场调度员通过监测飞机的方位 角变化,可以判断飞机的起降轨 迹和方向,确保机场的正常运行
和飞机的安全起降。
气象观测
气象观测中,方位角也被用来测 量风向、风速等气象参数。
03 方位角的计算实例
科研应用
天文学
京改版九年级数学上册 20.5.2《测量与计算—方位角》同步练习(含答案)

北京课改版九年级数学上册20.5.2《测量与计算—方位角》同步练习一.选择题(本大题共10小题,每小题3分,共30分)1.如图,一艘轮船向正东方向航行,上午9时测得它在灯塔P的南偏西30°方向、距离灯塔120海里的M处,上午11时到达这座灯塔的正南方向的N处,求这艘轮船在这段时间内航行的平均速度是( )A. 30海里/时B.20海里/时C. 15海里/时D. 10海里/时2. 如图,C,D是两个村庄,分别位于湖的南、北两端A和B的正东方向上,且D位于C的北偏东30°方向上,CD=6 km,则AB=( )A.6 2 km B.3 2 kmC.6 3 km D.3 3 km3.如图,某渔船在海面上朝正东方向匀速航行,在A处观测到灯塔M在北偏东60°方向上,且AM =100海里,要使渔船到达离灯塔距离最近的位置,那么该船继续航行( )A.50 2 海里B.60 2 海里C.50 3 海里D.60 3 海里4. 如图,某船由西向东航行,在点A处测得小岛O在北偏东60°,船航行了10海里后到达点B,这时测得小岛O在北偏东45°,船继续航行到点C时,测得小岛O恰好在船的正北方,此时船到小岛A.53海里B.5(3+1) 海里C.10 3 海里D.10(3+1) 海里5. 如图,一艘轮船以每小时20海里的速度沿正北方向航行,在A处测得灯塔C在北偏西30°方向,轮船航行2小时后到达B处,在B处测得灯塔C在北偏西60°方向.当轮船到达灯塔C的正东方向的D处时,则此时轮船与灯塔C的距离是( )A.10 2 海里B.20 2 海里C.10 3 海里D.20 3 海里6. 如图,一艘渔船位于小岛M的北偏东45°方向、距离小岛180海里的A处,渔船从A处沿正南方向航行一段距离后,到达位于小岛南偏东60°方向的B处.则渔船从A到B的航行过程中与小岛M 之间的最小距离是( )A.180 2 海里B.90 2 海里C.60 3 海里D.45 3 海里7.如图,港口A在观测站O的正东方向,OA=4 km,某船从港口出发,沿北偏东15°方向航行一段时间后到达B处,此时从观测站O处测得该船位于北偏东60°的方向,则该船航行的距离(即AB的长)为( )8.如图,小岛在港口P的北偏西60°方向,距港口56海里的A处,货船从港口P出发,沿北偏东45°方向匀速驶离港口P,4小时后货船在小岛的正东方向,则货船的航行速度是( ),A.82海里/时 B.72海里/时C.83海里/时 D.73海里/时9.如图,在距离铁轨200 m的B处观察由北京开往贵阳的“和谐号”动车,当动车车头在A处时,恰好位于B处的北偏东60°方向上;10 s后,动车车头到达C处,恰好位于B处的西北方向上,则这时段动车的平均速度是( )A.100(3+1) m/s B.50(3+1) m/sC.40(3+1) m/s D.20(3+1) m/s10.如图,已知一条东西走向的河流,在河流对岸有一点A,小明在岸边点B处测得点A在点B的北偏东30°方向上,小明沿河岸向东走80 m后到达点C,测得点A在点C的北偏西60°方向上,则点A到河岸BC的距离为( )A.40 m B.20 3 mC.20 2 m D.20(3+1)m二.填空题(共8小题,3*8=24)11. 知识改变世界,科技改变生活.导航装备的不断更新极大方便了人们的出行.如图,某校组织学生乘车到黑龙滩(用C表示)开展社会实践活动,车到达A地后,发现C地恰好在A地的正北方向,且距离A地13千米,导航显示车辆应沿北偏东60°方向行驶至B地,再沿北偏西37°方向行驶一段距离才能到达C地,则B,C两地的距离是__________.12. 如图,在航线l的两侧分别有观测点A和B,点A到航线l的距离为2 km,点B位于点A的北偏东60°方向且与A相距10 km处.现有一艘轮船从位于点B的南偏西76°方向的C处,正沿该航线自西向东航行至点A的正北方向的D处.则观测点B到航线l的距离是____________.13. 如图,在一笔直的海岸线l上有相距2 km的A,B两个观测站,B站在A站的正东方向上,从A 站测得船C在北偏东60°的方向上,从B站测得船C在北偏东30°的方向上,则船C到海岸线l的距离是________________.14. 如图,某船由西向东航行,在点A测得小岛O在北偏东60°,船航行了10海里后到达点B,这时测得小岛O在北偏东45°,船继续航行到点C时,测得小岛O恰好在船的正北方,此时船到小岛的距离是_____________.15.如图,某轮船在点O处测得一个小岛上的电视塔A在北偏西60°的方向,船向西航行20海里到达B处,测得电视塔A在船的西北方向,若要轮船离电视塔最近,则还需向西航行_________________.,16. 如图,一艘海轮位于灯塔C的北偏东45方向,距离灯塔100海里的A处,它沿正南方向航行一17. 如图,一艘轮船以每小时20海里的速度沿正北方向航行,在A处测得灯塔C在北偏西30°方向,轮船航行2小时后到达B处,在B处测得灯塔C在北偏西60°方向.当轮船到达灯塔C的正东方向的D处时,则此时轮船与灯塔C的距离是(结果保留根号)______________.18. 如图,一艘游轮在A处测得北偏东45°的方向上有一灯塔B,游轮以202海里/时的速度向正东方向航行2小时到达C处,此时测得灯塔B在C处北偏东15°的方向上,则A处与灯塔B的距离是结果精确到1海里.参考数据:2≈1.41,3≈1.73)____________.三.解答题(共7小题,46分)19.(6分)由我国完全自主设计、自主建造的首艘国产航母于2018年5月成功完成第一次海上试验任务.如图,航母由西向东航行,到达A处时,测得小岛C位于它的北偏东70°方向,且与航母相距80海里,再航行一段时间后到达B处,测得小岛C位于它的北偏东37°方向.如果航母继续航行至小岛C的正南方向的D处,求还需航行的距离BD的长.(参考数据:sin70°≈0.94,cos70°≈0.34,tan70°≈2.75,sin37°≈0.6,cos37°≈0.80,tan37°≈0.75)20.(6分)“五·一”期间,小明到小陈家所在的美丽乡村游玩,在村头A处小明接到小陈发来的定位,发现小陈家C在自己的北偏东45°方向,于是沿河边笔直的绿道l步行200米到达B处,这时定位显示小陈家C在自己的北偏东30°方向,如图所示.根据以上信息和下面的对话,请你帮小明算一算他还需沿绿道继续直走多少米才能到达桥头D处(结果保留根号).21.(6分)据调查:超速行驶是引发交通事故的主要原因之一.小明用所学知识对一条笔直公路上车辆进行测速,如图所示,观测点C到公路的距离CD=200 m,检测路段的起点A位于点C的南偏东60°方向上,终点B位于点C的南偏东45°方向上.一辆轿车由东向西匀速行驶测得此车由A处行驶到B处时的时间为10 s,问此车是否超过了该路段16 m/s的限制速度(观测点C离地面的距离忽略不计,参考数据: 2 ≈1.41, 3 ≈1.73)?22.(6分) 如图,一艘货轮位于灯塔P北偏东53°方向,距离灯塔100海里的A处,另一艘客轮位于货轮正南方向,且在灯塔P南偏东45°方向的B处,求此时两艘轮船之间的距离AB(结果精确到1海里).(参考数据:sin 53°≈0.799,cos 53°≈0.602,tan 53°≈1.327)23.(6分) 如图,海平面上灯塔O方圆100千米范围内有暗礁.一艘轮船自西向东方向航行,在点A 处测得灯塔O在北偏东60°方向,继续航行100千米后,在点B处测得灯塔O在北偏东37°方向.为了避免触礁,这艘轮船是否需要改变航向(参考数据:sin 37°≈0.601 8,cos 37°≈0.798 6,tan 37°≈0.753 6,cot 37°≈1.327,3≈1.732)?24.(8分)在某市十个全覆盖工作的推动下,某乡镇准备在相距3千米的A,B两个工厂间修一条笔直的公路,在工厂A北偏东60°方向,工厂B北偏西45°方向有一点P,以点P为圆心,1.2千米为半径的区域是一个村庄,问:修筑公路时,这个村庄是否有居民需要搬迁(参考数据:3≈1.7)?25.(8分) 如图,某海监船向正西方向航行,在A处望见一艘正在作业的渔船D在南偏西45°方向上,海监船航行到B处时望见渔船D在南偏东45°方向上,又航行了半小时到达C处,望见渔船D在南偏东60°方向上.若海监船的速度为40海里/时,求A,B之间的距离(结果保留根号).参考答案:1-5ADCBD 6-10BCBDB11. (20-53)千米12. 3km13. 3km14.10(3+1) 海里15.10(3+1)海里16.100 2 海里17. 140海里18. 109海里19. 解:由题意得:∠ACD=70°,∠BCD=37°,AC=80海里,在Rt△ACD中,CD=AC·cos∠ACD=27.2(海里),在Rt△BCD中,BD=CD·tan∠BCD=20.4(海里).答:还需航行的距离BD的长为20.4海里20. 解:由题意得∠CAD=45°,∠CBD=60°,AB=200.设BD=x,故DC= 3 x.易得AD=DC,∴200+x=3x,解得x=100(3+1).答:小明还需沿绿道继续直走约100(3+1)米才能到达桥头D处.21. 解:依题意可知,CD=200 m,∠DCB=45°,∠DCA=60°,∴BD=CD=200.在Rt△ACD中,AD=CD·tan∠DCA=200 3.∴AB=2003-200=200×(3-1)≈146.∴实际车速约为146÷10=14.6(m/s).∵14.6<16,∴此车没有超过该路段16 m/s的限制速度.22. 解:由题意,得∠A=53°,BC=PC.在Rt△APC中,AC=100cos 53°≈60.2(海里),所以AB =AC +BC≈140(海里).答:两艘轮船之间的距离AB 约为140海里.23. 解:过点O 作OC 垂直于AB 的延长线于点C. 在Rt △COB 中,∠BOC =37°,BC =OC·tan 37°.在Rt △AOC 中,∠AOC =60°,AC =OC·tan 60°=3OC. ∵AC =AB +BC ,AB =100千米, ∴3OC =100+OC·tan 37°,解得OC≈102.2.∵OC >100千米,∴这艘轮船不需要改变.24. 解:过点P 作PC ⊥AB 于点C.设BC =x 千米,则AC =(3-x)千米.∵∠CPB =∠CBP =45°,∴PC =BC =x 千米. ∵∠EAB =90°,∠EAP =60°,∴∠PAC =90°-60°=30°,∴tan ∠PAC =PC AC ,即tan 30°=x 3-x =33, 解得x =3(3-1)2≈1.1<1.2, ∴修筑公路时,这个村庄有一些居民需要搬迁.25. 解:过点D 作DM ⊥AC 于点M.∵∠DBA =∠DAM =45°,∴DB =AD ,∠ADB =90°.∵DM ⊥AB ,∴DM =BM =AM.设DM =BM =AM =a 海里.∵∠CMD =90°,∠DCM =30°,∴CM =3DM.∵BC =40×12=20(海里),∴20+a =3a , 解得a =10(3+1).∴AB =2a =20(3+1)海里. 答:A ,B 之间的距离为20(3+1)海里.。
方向角与方位角问题

年级:九年级下册科目:数学主备: 审核:课题:28.2 方位角与方向角问题学习目标:能综合运用直角三角形的勾股定理与边角关系解决简单的实际问题.重点与难点1.重点:直角三角形的解法.2.难点:三角函数在解直角三角形中的灵活运用。
一、用一用用解直角三角形知识解决测量中的方位角问题.方位角与方向角1.方向角指北或指南方向线与目标方向所成的小于90°的角叫做方向角.如图(1)中的目标方向线OA,OB,OC分别表示北偏东60°,南偏东30°,北偏西70°.特别地,若目标方向线与指北或指南的方向线成45°的角,如图(1)的目标方向线OD与正南方向成45°角,通常称为西南方向.(1)(2)2.方位角从某点的指北方向线按顺时针转到目标方向的水平角,叫做方位角.•如图(2)中,目标方向线PA,PB,PC的方位角分别是40°,135°,225°.用解直角三角形的方法解决实际问题方法要点在解决实际问题时,我们要学会将千变万化的实际问题转化为数学问题,要善于将某些实际问题中的数量关系归结为直角三角形中的元素(边、角)•之间的关系,这样才能很好地运用解直角三角形的方法求解.解题时一般有以下三个步骤:1.审题.按题意画出正确的平面或截面示意图,并通过图形弄清已知和未知.2.将已知条件转化为示意图中的边、角或它们之间的关系,把实际问题转化为解直角三角形的问题.如果没有现成是直角三角形可供使用,可通过作辅助线产生直角三角形,再把条件和问题转化到这个直角三角形.3.根据直角三角形(或通过作垂线构造直角三角形)元素(边、•角)之间关系解有关的直角三角形.例1、如图所示,一艘海轮位于灯塔P的北偏东65°方向,•距离灯塔80海里的A处,它沿正南方向航行一段时间后,•到达位于灯塔P的南偏东34°方向上的B处.这时,海轮所在的B处距离灯塔P有多远?(精确到0.01海里)分析:因为△APB不是一个直角三角形,所以我们把一个三角形分解为两个直角三角形,△ACP与△PCB.PC•是东西走向的一条直线.AB是南北走向的一直线,所以AB与PC是相互垂直的,即∠ACP与∠BDP•均为直角.再通过65度角与∠APC互余的关系求∠APC;通过34度角与∠BPC•互余的关系求∠BPC.解:如图,在Rt△APC中,∵ cos(90°-65°)=___________________∴ PC=_____________________________=在Rt△BPC中,∠B=34°,∵sinB=__________________,∴PB=____________________________________≈_______ 因此,当海轮到达位于灯塔P的南偏东34°方向时,它距离灯塔P大约130.23海里.例2、解直角三角形有广泛的应用,解决问题时,•要根据实际情况灵活运用相关知识.例如,当我们要测量如图(1)所示大坝的高度h时,只要测出仰角α和大坝的坡面长度L,就能算出h=Lsinα.但是,当我们要测量如图(2)所示的山高h时,问题就不那么简单了.这是由于不能很方便地得到仰角α和山坡长度L.(1)(2)与测坝高相比,测山高的困难在于:坝坡是“直”的,而山坡是“曲”的.怎样解决这样的问题呢?我们设法“化曲为直,以直代曲”.我们可以把山坡“化整为零”地划分为一些小段,如图(3)表示其中一部分小段.划分小段时,注意使每一小段上的山坡近似是“直”的,可以量出这段坡长L1,测出相应的仰角α,这样就可以算出这段山坡的高度h1=L1sinα.(3)在每个小段上,我们都构造出直角三角形,利用上面的方法分别算出各段山坡的高度h1,h2,…….然后我们再“积零为整”,把h1,h2,…相加,于是得到山高h.以上解决问题中所用的“化整为零,积零为整”“化曲为直,以直代曲”的做法,就是高等数学中微积分的基本思想,它在数学中有重要地位,在今后的学习中,还会更多地了解这方面的容.二、总一总利用解直角三角形的知识解决实际问题的一般过程是:1.将实际问题抽象为数学问题(画出平面图形,•转化为解直角三角形的问题).2.根据条件的特点,适当选用锐角三角函数等去解直角三角形.3.得到数学问题的答案.4.得到实际问题的答案.三、做一做(一)、选择题.1.如图,轮船航行到C 处时,观测到小岛B 的方向是北偏西35°,那么同时从B 观测到轮船的方向是( ).A .南偏西35°B .东偏西35°C .南偏东55°D .南偏东35° 东北B C(第1题) (第5题) (第8题)2.•身高相同的三个小朋友甲、•乙、•丙放风筝,•他们放出的线长分别是300m ,250m ,200m ,线与地面所成的角分别为30°、45°、60°(假设风筝线是拉直的),则三人所放风筝( ).A .甲的最高B .乙的最低C .丙的最低D .乙的最高3.一日上午8时到12时,若太线与地面所成角由30°增大到45°,•一棵树的高为10m ,则树在地面上影长h 的围是( ).A .5<h ≤3B .10≤h ≤3.10<h<15 D .3 4.△ABC 中,AB=6,AC=3,则∠B 最大值是( ).A .30°B .45°C .60°D .无法确定5.如图,水库大坝横断面为梯形,坝顶宽6m ,坝高2m ,斜坡AB 的坡角为45°,•斜坡CD 的坡度i=1:2,则坝底AD 的长为( ).A .42mB .(3mC .78mD .(3)m6.△ABC 中,已知1cos 2A -+(tanB-3)2=0且AB=4,则△ABC 的面积是( ). A .43 B .4 C .23 D .27.一渔船上的渔民在A 处看见灯塔M 在北偏东60°方向,这艘船以28海里/小时的速度向正东航行,半小时到B 处,在B 处看见灯塔M 在北偏东15°方向,此时,灯塔M 与渔船的距离是( ).A .72B .142C .7D .148.某地夏季中午,当太阳移到屋顶上方偏南时光线与地面成80°角,房屋朝南的窗子高AB=1.8m ;要在窗子外面上方安装一个水平挡光板AC ,•使午间光线不能直接射入室,那么挡光板AC 的宽度应为( ).A .1.8tan80°mB .1.8cos80°mC . 1.8sin 80︒D .1.8cot80°m 9.若菱形的边长为4,它的一个角为126°,则较短的对角线长为( ).A .4sin54°B .4cos63°C .8sin27°D .8cos27°10.如图,上午9时,一条船从A 处出发以20海里/小时的速度向正北方向航行,•11时到达B 处,从A 、B 望灯塔C ,测得∠NAC=36°,∠NBC=72°,那么从B 处到灯塔C 的距离是( ).A .20海里B .36海里C .72海里D .40海里北BA NC(第10题) (第11题)11.如图,一电线杆AB 的影子分别落在了地上和墙上,某一时刻,小明竖起1•米高的直杆,量得其影长为0.5米,此时,他又量得电线杆AB落在地上的影子BD长3米,落在墙上的影子CD的高为2米,小明用这些数据很快算出了电线杆AB的高,•请你计算电线杆AB的高为().A.5米 B.6米 C.7米 D.8米二、填空题.12.升国旗时,某同学站在离旗杆底部24m处行注目礼,当国旗升至旗杆顶端时,•该同学视线的仰角恰为30°,若双眼离地面1.5m,则旗杆高度为______m.(•用含根号的式子表示)13.在地面上一点,测得一电视塔尖的仰角为45°,沿水平方向,•再向塔底前进a 米,又测得塔尖的仰角为60°,那么电视塔高为________.• • •14.•如图一铁路路基的横断面为等腰梯形ABCD,•根据图示数据得下底宽AD=______米.(第14题) (第15题)15.如图△ABC的顶点A、C的坐标分别是(0,4),(3,0),并且∠ACB=90°,∠B=•30°,则顶点B的坐标是________.16.如图,•燕尾槽的外口宽AD=•90mm,•深为70mm,•燕尾角为60•°,•则里口宽为________.(第16题) (第17题)17.如图,从高出海平面500m的直升飞机上,测得两艘船的俯角分别为45•°和30°,如果这两艘船一个在正东,一个在正西,那么它们之间的距离为______.三、解答题.18.甲、乙两船同时从港口O 出发,甲船以16.1海里/小时的速度向东偏南35°方向航行,乙船向西偏南58°,方向航行,航行了两小时,甲船到达A 处并观测到B 处的乙船恰好在其正西方向,求乙船的速度v .(精确到0.1海里/小时)(参考数据:sin32°≈0.53,cos32°≈0.85,tan32°≈0.62,cot32°≈1.60)19.去年某省将地处A 、B 两地的两所大学合并成了一所综合性大学,•为了方便A 、B 两地师生的交往,学校准备在相距2千米的A 、B 两地之间修筑一条笔直公路(图中的线段AB ),经测量,在A 地的北偏东60°方向,B 地的北偏西45°方向的C•处有一个半径为0.7千米的公园,问计算修筑的这条公路会不会穿出公园?为什么?60︒ 45︒B A C。
三角函数方位角问题
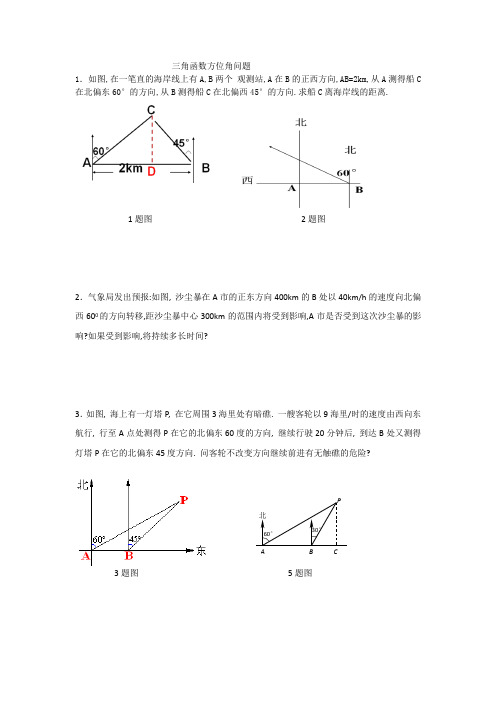
三角函数方位角问题1.如图,在一笔直的海岸线上有A,B 两个 观测站,A 在B 的正西方向,AB=2km,从A 测得船C 在北偏东60°的方向,从B 测得船C 在北偏西45°的方向.求船C 离海岸线的距离.1题图 2题图2.气象局发出预报:如图, 沙尘暴在A 市的正东方向400km 的B 处以40km/h 的速度向北偏西600的方向转移,距沙尘暴中心300km 的范围内将受到影响,A 市是否受到这次沙尘暴的影响?如果受到影响,将持续多长时间?3.如图, 海上有一灯塔P , 在它周围3海里处有暗礁. 一艘客轮以9海里/时的速度由西向东航行, 行至A 点处测得P 在它的北偏东60度的方向, 继续行驶20分钟后, 到达B 处又测得灯塔P 在它的北偏东45度方向. 问客轮不改变方向继续前进有无触礁的危险?3题图5题图PC30°60°北4.大海中某小岛A 的周围22km 范围内有暗礁. 一海轮在该岛的南偏西55°方向的B 处,由西向东行驶了20km 后到达该岛的南偏西25°方向的C 处.如果该海轮继续向东行驶,会有触礁的危险吗? (精确到0.1km).5.如图,小明同学在东西方向的环海路A 处,测得海中灯塔P 在北偏东60°方向上,在A 处向东500米的B 处,测得海中灯塔P 在北偏东30°方向上,则灯塔P 到环海路的距离PC = 米(结果保留根号).6.如图所示,A 、B 两城市相距100km. 现计划在这两座城市间修筑一条高速公路(即线段AB ),经测量,森林保护中心P 在A 城市的北偏东30°和B 城市的北偏西45°的方向上. 已知森林保护区的范围在以P 点为圆心,50km 为半径的圆形区域内. 请问:计划修筑的这条高速公路会不会穿越保护区. 为什么?(参考数据:732.13≈,414.12≈)6题图 7题图7.海上有一小岛A ,它周围8.7海里内有暗礁,某海船跟踪鱼群由西向东航行,在B 点测得小岛在北偏东60°,航行10海里后到达C 点,这时测得小岛A 在北偏东30°,如果渔船不改变航向,继续向东追踪捕捞,有没有触礁的危险?tan 250.47tan 55 1.43°≈°≈A B。
三角函数专练-方位角问题

三角函数应用专练-方位角问题1.如图所示,在某海域,一艘指挥船在C处收到渔船在B处发出的求救信号,经确定,遇险抛锚的渔船所在的B处位于C处的南偏西45°方向上,且BC =60海里;指挥船搜索发现,在C处的南偏西60°方向上有一艘海监船A,恰好位于B处的正西方向.于是命令海监船A前往搜救,已知海监船A的航行速度为30海里/小时,问渔船在B处需要等待多长时间才能得到海监船A的救援?(参考数据:≈1.41,≈1.73,≈2.45,结果精确到0.1小时)2.如图,我国南海巡逻艇在A处执行任务时,发现在A处的北偏东30°方向有一岛屿C,在A处的北偏东75°方向、相距60海里的B处有一不明船只正以15海里/时的速度向B处西北方向的C 岛航行,于是巡逻艇马上以20海里/时的速度开向C岛去拦截,问巡逻艇与不明船只谁先到达C岛?(参考数据:≈1.4,≈1.7)3.如图,在一笔直的海岸线L上有A、B两个观测点,A在B的正东方向,AB=2km.有一艘小船在点P处,从A处测得小船在北偏西60°的方向,从B 处测得小船在北偏东45°方向.(1)求P点到海岸线l的距离.(2)小船从点P处沿射线AP的方向继续行驶,求小船到B处的最短距离.4.如图,湿地景区岸边有三个观景台A、B、C,已知AB=700米,AC=500米,B点位于A点的南偏西60.7°方向,C点位于A点的南偏东66.1°方向.景区规划在线段BC的中点D处修建个湖心亭,并修建观景栈道AD.求A,D间的距离.(结果精确到0.1米)(参考数据:sin53.2°≈0.80,cos53.2°≈0.60,sin60.7°≈0.87,cos60.7°≈0.49,sin66.1°≈0.91,cos66.1°≈0.41,≈1.414).5.在综合实践课上,小聪所在小组要测量一条河的宽度,如图,河岸EF∥MN,小聪在河岸MN上点A处用测角仪测得河对岸小树C位于东北方向,然后沿河岸走了30米,到达B处,测得河对岸电线杆D位于北偏东30°方向,此时,其他同学测得CD=10米.请根据这些数据求出河的宽度.(精确到0.1)(参考数据:≈1.414,≈1.732)6.如图,在一笔直的沿湖道路上有A、B两个游船码头,观光岛屿C在码头A北偏东60°的方向,在码头B北偏东15°的方向,AB=4km.(1)求观光岛屿C与码头A之间的距离(即AC的长);(2)游客小明准备从观光岛屿C乘船沿湖回到码头A或沿CB回到码头B,若开往码头A、B的游船速度相同,设开往码头A、B所用的时间分别是t1、t2,求的值.(结果保留根号)。
2024年七年级数学《方位角》课件
2024年七年级数学《方位角》课件一、教学内容本节课选自2024年七年级数学教材第三章《图形与坐标》第三节《方位角》。
教学内容主要包括:了解方位角的概念,掌握方位角的计算方法,以及在实际问题中运用方位角。
二、教学目标1. 知识与技能:理解方位角的定义,学会计算方位角,并能运用到实际问题中。
2. 过程与方法:通过观察、实践、交流等环节,培养学生的空间想象能力和解决问题的能力。
3. 情感态度与价值观:激发学生对数学学习的兴趣,提高学生的合作意识和团队精神。
三、教学难点与重点教学难点:方位角的计算方法。
教学重点:方位角的定义及其在实际问题中的应用。
四、教具与学具准备教具:多媒体课件、直尺、量角器、指南针。
学具:直尺、量角器、指南针、练习本。
五、教学过程1. 导入新课:通过指南针的认识,引入方位角的概念。
2. 呈现内容:(1)方位角的定义:以观测者的位置为中心,将正北或正南方向作为起始方向旋转到目标的方向线所成的角。
(2)方位角的计算方法:利用指南针确定正北方向,然后根据目标的方向线与正北方向之间的夹角计算得出。
3. 实践操作:(1)分组讨论:让学生分组讨论如何计算方位角。
(2)例题讲解:讲解方位角的计算方法,并给出例题。
(3)随堂练习:让学生独立完成练习题,巩固所学知识。
六、板书设计1. 方位角的定义2. 方位角的计算方法3. 例题及解答4. 课堂练习题目七、作业设计1. 作业题目:(1)在平面直角坐标系中,点A(3,4),点B(6,7),求∠AOB的方位角(O为原点)。
(2)已知某地的正北方向,求该地观察到一个目标的方向线所成的方位角。
2. 答案:(1)∠AOB的方位角为45°。
(2)观察到的方位角为α(具体数值根据实际情况计算)。
八、课后反思及拓展延伸1. 反思:本节课学生对方位角的定义和计算方法掌握程度如何,有哪些需要改进的地方。
2. 拓展延伸:引导学生思考如何将方位角应用到其他领域,如地理、军事等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方位角数字问题修订版 IBMT standardization office【IBMT5AB-IBMT08-IBMT2C-ZZT18】
第课时
§2.5.1 方位角、数字问题
教学目标
1、经历分析具体问题中的数量关系、建立方程模型并解决问题的过程,认
识方程模型的重要性,并总结运用方程解决实际问题的一般步骤
2、通过列方程解应用题,进一步提高逻辑思维能力和分析问题,解决问题
的能力
教学重点和难点
重点:利用一元二次方程解决方位角、数字问题
难点:利用一元二次方程解决方位角、数字问题
教学过程设计
一、从学生原有的认知结构提出问题
一元二次方程的解法我们已经熟悉了。
这几节课,我们将学习如何利用一元二次方程解决一些现实问题。
二、师生共同研究形成概念
1、讲解例题
例1两个数的和为14,它们的积为48,求这两个数。
分析:让学生熟悉如何假设这两个数。
可先让学生自己尝试假设,再由老师引导。
例2两数差是3,这两数的平方和是117,求这两个数。
分析:与上例有所不同,正确假设两个数后,还需要理解如何根据题目列出正确的方程。
例3两个连续奇数的积是323,求这两个数。
分析:这里的两个奇数的假设是关键。
先列出几个连续的奇数,让学生分析他们有什么关系,再引导学生正确假设。
例4 若直角三角形的三边长为连续偶数,求它的斜边长。
分析:此例要借助勾股定理求解。
最终需要求的是斜边。
例5 如图,点O 有一个小岛,点A 和点A 的正北方B 处有两支灯塔。
已知两支灯塔相距33千米,∠OAB = 30°,求OA 的距离。
分析:利用直角三角形30度角所对的直角边等于斜边的一半求解。
例6 如图,货船从O 点出发,向点O 的正东方向前进,到达A 点后,向A 点
的正北方向到达B 点。
已知点B 到O 点的距离为5海里,且AB 的距离比OA 的距离长10海里。
求OA 多少海里。
分析:此例是借助一元二次方程和勾股定理求解。
要让学生审清题意,列对方程。
A B O 533A
B O 60°30°
例7如图,一艘海轮位于灯塔P的北偏东60°方向上的A处,它沿正南方向航行70海里后,到达位于灯塔P的南偏东30°方向上的B处,这时,
海轮所在的B处距离灯塔P有多远?(结果不取近似值)分析:此例较难,要慢慢引导学生分析,得出结果。
三、随堂练习
1、两数的和是12
,积是35,求这两个数。
2、两数的差等于4,积等于45,求这两个数。
3、(书本45、1、)三个连续整数两两相乘,再求和,结果为242,这三个
数分别是多少?
4、(书本62、2)一个数平方的2倍等于这个数的7倍,求这个数。
5、一直角三角形的三边长为连续整数,求这三条边的长。
P 四、小结
M N
列一元二次方程求解,关键之处在于审清题意,列对方程。
五、作业
1、两数差为5,积为84,求这两个数。
2、如图,一只船向东航行,上午9时到达一座灯塔P的西南68海里的M
处,上午11时到达这座灯塔的正南N处。
求这只船航行的速度(答案可带根号)
六、教学后记。