方位角与象限角
方位角
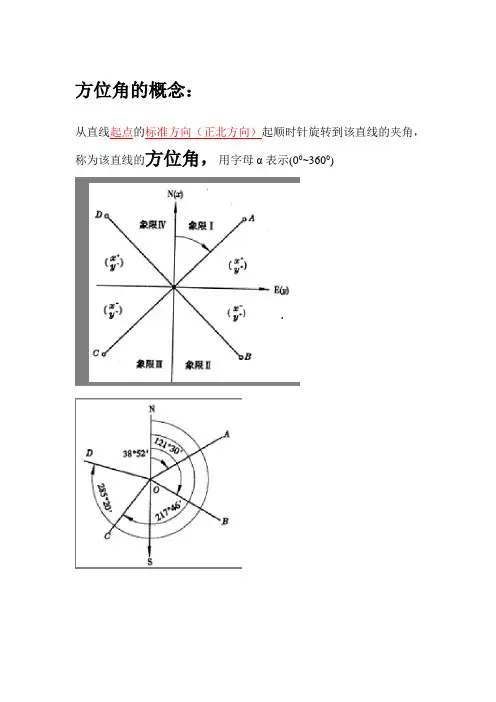
方位角的概念:从直线起点的标准方向(正北方向)起顺时针旋转到该直线的夹角,称为该直线的方位角,用字母α表示(00~3600)象限角的概念从直线起点的北端或南端起到该直线的夹角,称为该直线的象限角,用字母R 表示(00~900)象限角的计算公式:R=|1212x x y y arctg --|方位角与象限角的换算关系1. 字母所代表的意义:x 1:QD 的X 坐标y 1:QD 的Y 坐标x 2:ZD 的X 坐标y 2:ZD 的Y 坐标D :QD ~ZD 的距离α:QD ~ZD 的方位角2. 计算公式: ()()212212y y x x S -+-=1)当∆y=y 2- y 1>0,∆x=x 2- x 1>0时:α=R2)当∆y=y 2- y 1>0,∆x=x 2- x 1<0时:α=1800-R3)当∆y=y 2- y 1<0 , ∆x=x 2- x 1<0时:α=1800+R4)当∆y=y 2- y 1<0 , ∆x=x 2- x 1>0时:α=3600-RαBA =αAB ±1800例题:A 点坐标(308353.041,536258.627 ),B 点坐标(308366.755 ,536524.674),计算R AB ,αAB解:∆y =y 2- y 1=536524.674-536258.627=266.047>0∆x=x 2- x 1=308366.755-308353.041=13.714>0R AB =|1212x x y y arctg --|=87°2′57″由于∆y=y 2- y 1>0,∆x=x 2- x 1>0,所以,αAB= R AB =87°2′57″。
坐标方位角和象限角的关系表-概述说明以及解释
坐标方位角和象限角的关系表-概述说明以及解释1.引言1.1 概述在几何学和数学中,坐标方位角和象限角是两个重要的概念。
坐标方位角是指向任意点在直角坐标系中与正向X 轴的夹角,通常用弧度或度数表示;而象限角是指一个角落在某一象限内的角度,从正向X 轴逆时针旋转而来,范围通常是0 到360。
本文将探讨坐标方位角与象限角之间的关系,分析它们在数学和几何中的重要性。
通过对这两个角度概念的深入研究,我们可以更好地理解空间中位置和方向的表示方式,并且在实际问题中进行角度计算和图形分析。
在本文的结论部分,我们将总结这两种角度概念的关系,提供一些应用举例并展望未来可能的研究方向。
通过本文的阅读,读者可以更全面地了解坐标方位角和象限角的关系,为进一步学习和研究奠定基础。
1.2文章结构1.2 文章结构本文主要分为引言、正文和结论三个部分。
在引言部分中,将对坐标方位角和象限角的概念进行概述,介绍本文的结构以及文章撰写的目的。
在正文部分中,将详细讨论坐标方位角的定义和范围,象限角的定义和性质,以及两者之间的关系。
在结论部分中,将对文章进行总结,提出相关的应用举例,并展望未来的研究方向。
通过这样的结构安排,读者可以系统地了解和掌握坐标方位角和象限角的知识,并进一步探讨其在实际问题中的应用和发展前景。
1.3 目的本文旨在探讨坐标方位角和象限角之间的关系,帮助读者更深入地理解这两个概念在数学中的应用和意义。
通过对坐标方位角和象限角的定义、范围以及性质进行详细分析,我们将揭示它们之间的联系,并探讨它们在解决实际问题中的应用。
通过本文的阐述,读者可以更好地理解和运用坐标方位角和象限角,从而提高数学解题的能力和水平。
通过具体的应用举例,我们将展示坐标方位角和象限角在实际问题中的运用,帮助读者更好地理解其实际意义。
最后,我们将展望未来研究的方向,为进一步深入研究和探讨坐标方位角和象限角的相关问题提供思路和指导。
通过本文的阐述,我们希望读者可以全面了解和掌握坐标方位角和象限角的知识,从而更好地运用于实际生活和学习中。
方位角计算公式.
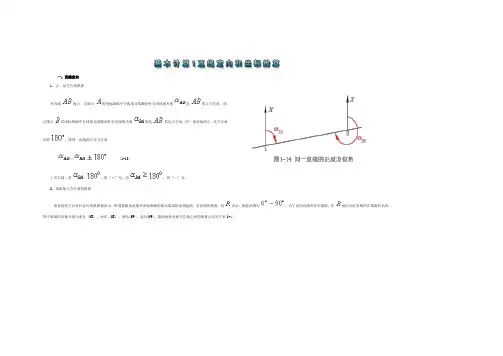
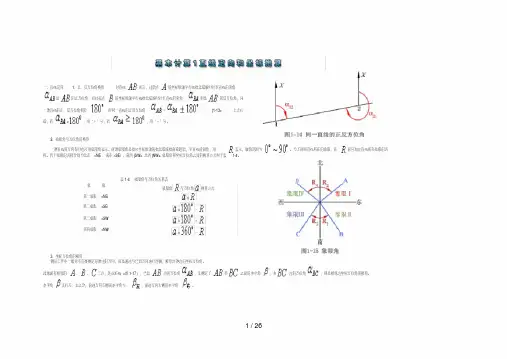
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
象限角与坐标方位角
第四章→第四节→直线定向二、直线方向的表示方法(一)方位角从过直线段一端的基本方向线的北端起,以顺时针方向旋转到该直线的水平角度,称为该直线的方位角。
方位角的角值为0°~360°取值。
如图4-16所示,因基本方向有三种,所以方位角也有三种,真方位角、磁方位角、坐标方位角。
以真子午线为基本方向线,所得方位角称为真方位角,一般以表示。
以磁子午线为基本方向线,则所得方位角称为磁方位角一般以来表示。
以坐标纵轴为基本方向线所得方位角,称为坐标方位角(有时简称方位角),通常以来表示。
(二)象限角对于直线定向,有时也用小于90°的角度来确定。
从过直线一端的基本方向线的北端或南端,依顺时针(或逆时针)的方向量至直线的锐角,称为该直线的象限角,一般以“”表示。
象限角的角值为0°~90°。
图4-17所示, 为经过O点的基本方向线,O1、O2、O3、O4为地面直线,则、、、分别为四条直线的象限角。
若基本方向线为真子午线,则相应的象限角为真象限角。
若基本方向线为磁子午线,则相应的象限角为磁象限角。
仅有象限角的角值还不能完全确定直线的位置。
因为具有某一角值(例如50°)的象限角,可以从不同的线端(北端或南端)和不同的方向(向东或向西)来度量。
所以在用象限角确定直线的方向时,除写出角度的大小外,还应注明该直线所在象限名称:北东、南东、南西、北西等。
例如图4-17中,直线O1、O2、O3、O4的象限角相应地要写为北东、南东、南西、北西,它们顺次相应等于第一、二、三、四象限中的象限角。
象限角也有正反之分,正反象限角值相等,象限名称相反。
(三)坐标方位角与象限角的关系同一直线的坐标方位角与象限角之间的关系如表4-2所列。
(四)正反坐标方位角的关系(见图4-18)相对来说一条直线有正、反两个方向。
直线的两端可以按正、反方位角进行定向。
若设定直线的正方向为,则直线的方位角为正方位角,而直线BA的方位角就是直线的反方位角。
三种方位角之间的关系
【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。
(一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。
(1)真方位角。
某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。
由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。
通常在精密测量中使用。
(2)磁方位角。
地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。
在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。
由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。
(3)坐标方位角。
由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。
方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。
不同的方位角可以相互换算。
军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。
换算作:360度=6000密位。
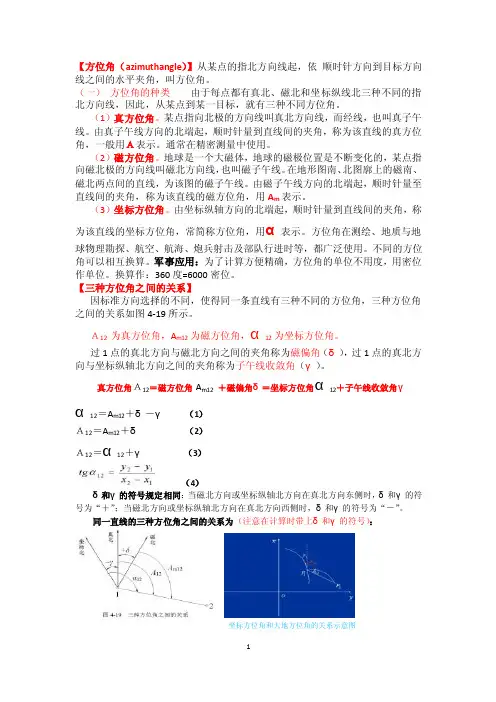
【三种方位角之间的关系】因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角之间的关系如图4-19所示。
A12 为真方位角,A m12为磁方位角,α12为坐标方位角。
过1点的真北方向与磁北方向之间的夹角称为磁偏角(δ),过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角(γ)。
真方位角A12=磁方位角A m12+磁偏角δ=坐标方位角α12+子午线收敛角γα12=A m12+δ-γ(1)A12=A m12+δ(2)A12=α12+γ(3)(4)δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。
同一直线的三种方位角之间的关系为(注意在计算时带上δ和γ的符号):坐标方位角和大地方位角的关系示意图上式中:γ为平面子午线收敛角,当站点在中央子午线西侧时γ为负,在东侧时为正;δ为Gauss投影的方向改化[1]。
方位角计算公式
辅助 计算
点名 2 BM1 1
2
3
BM2
测站数 3 8 3 4 5
20
表 2-2 附合水准路线计算
观测高差 /m
改正数 /m
改正后高差 /m
4
5
6
+8.364
- 0.014
+8.350
- 1.433
- 0.005
- 1.438
- 2.745
- 0.007
- 2.752
+4.661
- 0.008
+4.653
+ 8.847
- 0.034
一、直线定向
1、正、反方位角换算
对直线
而言,过始点
的坐标纵轴平行线指北端顺时针至直线的夹角
是
的正方位角,而过端点
的坐标纵轴平行线指北端顺时针至直线的夹角
则是
的反方位角,同
一条直线的正、反方位角相差
,即同一直线的正反方位角
=
(1-13>
上式右
端,若
<
,用“+”号,若
,用“-”号。
2、象限角与方位角的换算
算
各
待
定
点
的
高
程
。
如上 所述,闭 合水准 路线的 计算方法除高差 闭合差 的计算有 所区别 而外,其余与附 合路线 的计算 完全相 同。
二
、
举
例
1.
附
合
水
准
路
线
算
例
5 / 26
下图 2-18 所示附合水准路线为例,已知水准点 A 、 B 和待定点 1、2、3 将整个路线分为四个测段。
测段号 1 1 2 3
测量中象限角与坐标方位角的区别
测量中象限角与坐标方位角的区别在数学和物理学中,我们经常需要测量角度来描述物体的方向或位置。
在测量角度时,有时会遇到两种不同的角度表示方法:中象限角和坐标方位角。
尽管它们都用于表示角度,但它们具有不同的概念和应用。
中象限角中象限角是指位于平面直角坐标系中的角度,它与x轴的夹角范围在0到180度之间。
中象限角是以原点为基准点,沿逆时针方向测量的角度。
它是一个简化的角度表示方法,通常用于描述物体在平面内的方向。
以坐标系的原点为中心,从x轴开始,逆时针方向测量的角度范围从0度到180度。
例如,当我们说物体在第一象限时,它的中象限角是在0度到90度之间。
同样地,在第二、第三和第四象限中,角度范围分别是90度到180度、180度到270度和270度到360度。
中象限角的测量方法非常直观和简便,可以快速确定一个角度的位置。
它通常适用于平面几何和图形分析等领域。
坐标方位角坐标方位角是一种描述二维空间中方向的角度表示方法,它通常用于极坐标系。
坐标方位角是从极轴(通常是x轴)逆时针方向测量的角度,范围从0度到360度。
在极坐标系中,我们用极径和方位角来描述一个点的位置。
极径是从原点到点的距离,而方位角是从极轴到点的连线与极轴的夹角。
方位角的测量通常沿逆时针方向,从正方向开始,逐渐增加到360度。
坐标方位角的优势在于可以精确地描述一个点的方向。
它通常用于导航系统、航空航海、天文学等领域中。
通过方位角,航空飞行员可以准确判断自己的方向和位置,天文学家可以确定天体的位置和运动。
区别与应用尽管中象限角和坐标方位角都用于测量角度,但它们的概念和应用有所不同。
中象限角是在平面直角坐标系中使用的角度表示方法,主要用于描述物体在平面内的方向。
它是一个简化的角度表示,适用于平面几何和图形分析等领域。
坐标方位角是在极坐标系中使用的角度表示方法,主要用于描述点在二维空间中的方向。
它可以精确地描述点的方向,适用于导航系统、航空航海、天文学等领域。
每个象限中坐标方位角与象限角的关系
每个象限中坐标方位角与象限角的关系下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!每个象限中坐标方位角与象限角的关系在平面直角坐标系中,角度可以通过不同的方式表示,包括方位角(极角)和象限角。
方位角计算公式
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角计算
日志上一篇:建筑放线下一篇:测量的人|返回日志列表∙分享∙转载∙复制地址∙选用信纸∙转发到微博灲子學测量μ 2010年01月20日 16:31 阅读(12) 评论(0) 分类:个人日记∙举报∙字体:大▼o小o中o大导线测量坐标方位角推算测绘专业中,象限是顺时针方向排列的。
左上角为第一象限。
1、第一象限方位角 = 象限角例如:象限角NE45 方位角=452、第二象限方位角 = 180-象限角例如:象限角SE45 方位角=180-SE45=135度3、第三象限方位角 = 180+象限角例如:象限角SW45 方位角=180+SW45=225度4、第四象限方位角 = 360-象限角例如:象限角NW45 方位角=360-NW45=315度方位角推算:方位角=(上一边方位)+(水平角)±180°即α1=α0+β±180°注意事项:若α0+β<180 则α1=α0+β+180°若α0+β>180 则α1=α0+β-180°如果计算出来的α1大于360,则α1=α1-360°标签象限方位角导线推算坐标∙举报∙字体:大▼o小o中o大∙分享∙转载∙复制地址∙选用信纸∙转发到微博本文最近访客∙飘落的思念lv23:17删除记录∙科比布莱恩特lv3-17∙学海无崖lv2-19∙探路者lv上一篇:建筑放线下一篇:测量的人|返回日志列表评论看完此日志,是不是也有很多感受,赶快点评一下吧。
主人很期待哦!关闭提示还没有人发表评论来坐第一个沙发发表评论系统正在进行升级维护中,暂不支持日志评论,敬请谅解!表情礼物 | 更多功能附加功能展开匿名评论发表取消 (可按Ctrl+Enter发表)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线定向
令狐采学
确定地面上两点之间的相对位置,除了需要测定两点之间的水平距离外,还需确定两点所连直线的方向。
一条直线的方向,是根据某一标准方向来确定的。
确定直线与标准方向之间的关系,称为直线定向。
一、标准方向
1.真子午线方向
通过地球表面某点的真子午线的切线方向,称为该点的真子午线方向。
真子午线方向可用天文测量方法测定。
2.磁子午线方向
磁子午线方向是在地球磁场作用下,磁针在某点自由静止时其轴线所指的方向。
磁子午线方向可用罗盘仪测定。
3.坐标纵轴方向
在高斯平面直角坐标系中,坐标纵轴线方向就是地面点所在投影带的中央子午线方向。
在同一投影带内,各点的坐标纵轴线方向是彼此平行的。
二、方位角
测量工作中,常采用方位角表示直线的方向。
从直线起点的标准方向北端起,顺时针方向量至该直线的水平夹角,称为该直线的方位角。
方位角取值范围是0˚~360˚。
因标准方向有真子午线方向、磁子午线方向和坐标纵轴方向之分,对应的方位角分别称为真方位角(用A表示)、磁方位角(用Am表示)和坐标方位角(用α表示)。
三、三种方位角之间的关系
因标准方向选择的不同,使得一条直线有不同的方位角,如图????所示。
过点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。
过点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。
δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。
同一直线的三种方位角之间的关系为:
(????);
(????);
(????)
四、坐标方位角的推算
.正、反坐标方位角
如图??
所示,以A为起点、B为终点的直线AB的坐标方位角αΑB,称为直线AB的坐标方位角。
而直线BA的坐标方位角αBA,称为直线AB的反坐标方位角。
由图??
中可以看出正、反坐标方位角间的关系为:
(4-17)
2.坐标方位角的推算
在实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。
如图4-21所示,已知直线12的坐标方位角α12,观测了水平角β2和β3,要求推算直线23和直线34的坐标方位角。
由图4-21可以看出:
因β2在推算路线前进方向的右侧,该转折角称为右角;
β3在左侧,称为左角。
从而可归纳出推算坐标方位角的一般公
式为:
(4-18)
(4-19)
计算中,如果α前>360˚,应自动减去360°;如果α前
<0˚,则自动加上360˚。
五、象限角
1.象限角
由坐标纵轴的北端或南端起,沿顺时针或逆时针方向量至
直线的锐角,称为该直线的象限角,用R表示,其角值范围为0˚~90˚。
如图4-22所示,直线01、02、03和04的象限角分别为北东R01、南东R02、南西R03和北西R04。
2.坐标方位角与象限角的换算关系由图4-23可以看出坐标方位角与象限角的换算关系:
在第Ⅰ象限,R=α在第Ⅱ象限,R=180°-α在第Ⅲ象限,R=α-180°在第Ⅳ象限,R=360°-α
不同象限坐标增量的符号
坐标方位角及其所在
之符号
象限之符号
++
(第一象限)
(第二象限)-+
--
(第三象
限)
(第四象限+-。