基于GPS校准的数字式守时钟守时算法研究
基于GPS校准的数字式守时钟守时算法研究
计算机与数字工程 Computer & D ig ital Eng ineer ing
V o l. 39 No . 3 12
基于 GPS 校准的数字式守时钟守时算法研究*
田 鸣 王瑞清
( 华中科技大学控制科学与工程系 武汉 430074)
摘 要 通常守时系统都采用高稳晶体振荡器 作为频率 标准, 但由 于温度 和老化等 原因导 致其长 期稳定 度不尽 如人 意, 严重影响时钟的守时精度, 改变电路的分频比可以对其进行补偿。数 字式守时钟 采用了固 定频率晶振 驱动的分频 比可 精细微调的基于加法器的时钟电路。首先介绍了一种 G PS 校准的 数字式高 精度守时钟 并讲述了 其工作 原理, 然后对 如何 快速、准确的在数字式守时钟中得到晶振的分 频比补偿值进行了研究, 提 出了算术平 均值滤波 算法和卡尔 曼滤波算法 这两 种算法, 并搭建了实验平台。经验证, 卡尔曼滤波算法在快速性和准确性上要优于算术平均值算法。
晶振在自由振荡的情况下每秒守时误差的平均值为132表明晶振在长时间的使用后由于老化率等因素的影响使晶振的守时精度变的很差守时精度已经很高而且守时钟随着守时时间的增加秒脉冲abps上升沿与gps接受机的秒脉冲gpsps上升沿的偏差会发生减小的现象说明ab对晶振分频比的改变起到了抑制偏差增大的效果为了验证补偿步距值能够对晶振的守时精度产生很大的影响可以对守时钟送入一个比较差的送入步距值50000并与gps接收机秒脉冲上升沿同步后在晶振预热充分卫星个数大于等于个的情况下通过示波器观察和计算所得的守时钟每秒ps上升沿超前秒脉冲gpsps上升沿50000测量时间间隔测量秒脉冲偏差晶振每秒守时偏差4005ms3ms5ms5ms6ms50min82min112mi131ns134ns134ns133ns132ns131ns131ns131ns131ns可以通过ab钟电路对恒温晶振进行步距值补偿守时钟送入步51781后产生的秒脉冲ab上升沿与gps接收机秒脉冲gpsps上升沿同步后振预热充分卫星个数大于等于过示波器观察和计算所得的守时钟每秒守时偏差如表所示秒脉冲abps上升沿超前秒脉冲gpsps上升沿51781测量时间间隔测量秒脉冲偏差守时钟每秒守时偏差10117min25min2033min325ms2ms990ns985ns993ns992ns991ns980ns987ns994ns201min2712ms993ns测量时间间隔测量秒脉冲偏差守时钟每秒守时偏差可知守时钟每秒守时偏差的平均值为99151792后守时钟每秒守时偏差的差值为991
应用GPS接收板研制高精度自守时时钟
作 者 简 介 : 张 献 功 , 男 , &E+# 年 生 , 山 东 高 唐 人 , 硕 士 研 究 生 。 研究领域:车辆安全控制技术、交通安全设备工程。
X编辑:梁
玉Y
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
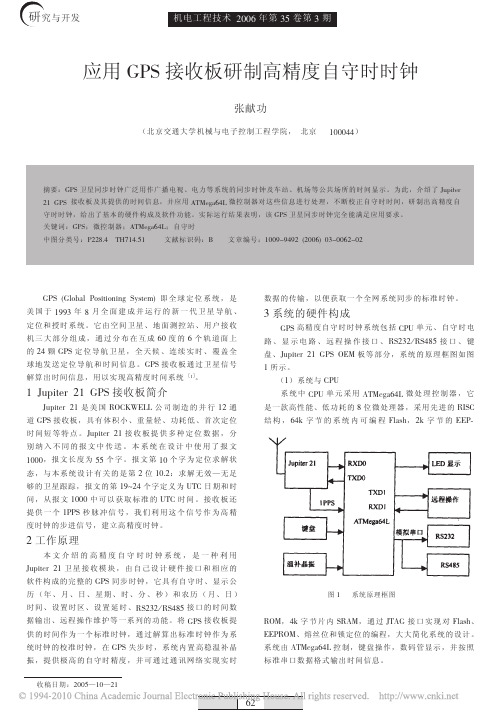
收稿日期: !""% — )" — !) 图) 系统原理框图
HI4, *R 字 节 片 内 (H24, 通 过 +32& 接 口 实 现 对 SA6DT 、 MM’HI4、熔丝位和锁定位的编程,大大简化系统的设计。
系统由 234056#*7 控制,键盘操作,数码管显示,并按照 标准串口数据格式输出时间信息。
\>D 时钟具有 7D!$! 与 7D)H% 两个通信接口,以满足
不同通信系统的要求。通过 这 两 个 接 口 , 卫 星 同 步 时 钟 可 输 出 & 次 ^ 5, 包 括 年 、 月 、 日 、 时 、 分 、 秒 在 内 的 完 整 时 间信息,也可作为通信下位 机 在 需 要 时 为 处 于 上 位 机 的 装 置提供准确的时间信息。 (# )按键 系统有四个按键, 通 过 按 键 可 以 进 行 时 间 、 时 区 、 延 时等设置。
守时时钟,给出了基本的硬件构成及软件功能。实际运行结果表明,该 &’( 卫星同步时钟完全能满足应用要求。 关键词: &’( ;微控制器; 234056#*7 ;自守时 中图分类号: ’!!89*
3:;)*9%)
文献标识码: <
文章编号: )""=>=*=! ?!""#@ "$>""#!>"!
GPS卫星同步时钟系统的技术研究
GPS卫星同步时钟是针对计算机、自动化装置等进行校时而研发的高科技产品,GPS卫星同步时钟从GPS卫星上获取标准的时间信号,将这些信号通过各种接口传输给自动化系统中需要时间信息的设备(计算机、保护装置、故障录波器、事件顺序记录装置、安全自动装置、远动RTU),这样就可以达到整个系统的时间同步。
GPS卫星同步时钟以GPS信号作为时间源,同时可选北斗、B码、CDMA、原子钟等时间源。
GPS卫星同步时钟产品采用全模块化结构设计,不仅实现了板卡全兼容,还提供了丰富的信号接口资源和开放式特殊接口设计平台,具备优异的兼容能力。
可提供多路NTP/SNTP信号、PTP信号、脉冲信号(1PPS/M/H,空接点、差分、TTL、24V/110V/220V有源、光)、IRIG-B 信号(TTL、422、AC、光)、DCF77信号、时间报文(RS232、RS422/485、光),可以满足不同设备的对时接口要求,广泛应用于电力、金融、通信、交通、广电、安防、石化、冶金、水利、国防、医疗、教育、IT等领域。
GPS卫星同步时钟设备采用表面贴装技术生产,以高速芯片进行控制,具有精度高、稳定性好、功能强、无积累误差、不受地域气候等环境条件限制、性价比高、操作简单、免维护等特点,适合无人值守。
GPS卫星同步时钟设备的特点:1.高品质的工业级元件,高水准的电气设计,高密度集成的电路结构,使装置拥有优异的电气隔离和电磁屏蔽表现,整机无可调节器件,极大提高了装置抗干扰性能与可靠性保障。
2.自保持能力强,装置收不到卫星信号后,自保持能力优于0.42μS/min。
3.支持单星授时模式,适用于收星效果不佳的情况,有屋顶和贴窗天线可供选择。
4.采用双核处理器,精度高,同步快。
5.GPS接收天线重点考虑了防雷设计、稳定性设计、抗干扰设计,信号接收可靠性高,不受电厂/变电站地域条件和环境的限制。
6.装置具有自复位能力,在因干扰造成装置程序出错时,能自动恢复正常工作。
基于GPS北斗卫星授时系统和NTP网络授时服务器的设计与开发

基于GPS北斗卫星授时系统和NTP网络授时服务器的设计与开发天文观测设备对于控制系统的时间准确度有严格要求。
为此,采用搭建高精度NTP服务器的方法实现系统校时。
基本思路是从NMEA018 3数据中提取时间信息,通过PPS信号来保证高精度。
具体实现方法是采用GPS接收模块G591来构造硬件电路,软件部分需要NTP服务器软件和GPS的正确安装和配置。
对照实验表明,基于GPS的NTP服务器校时精度可以达到微秒量级,工作性能稳定而可靠。
0 引言准确的时间是天文观测所必需的。
天文望远镜在特定时间内的准确指向、CCD曝光时间的控制以及不同波段观测数据所进行的高精度同步比对等应用需要系统至少有亚毫秒的时间准确度。
然而就目前来看,一般的计算机和嵌入式设备所使用的晶体振荡器的精度为几个或者几十个ppm(百万分之一秒),并且会受温度漂移的影响,使得每天的误差能够达到秒级,若再考虑元器件的老化或外界干扰等因素,误差可能会超过10 s,如果不及时校正,其误差积累将不可忽视。
网络时间协议NTP(Network Time Protocol)是美国特拉华大学的MILLS David L.教授在1982年提出的,其设计目的是利用互联网资源传递统一和标准的时间。
目前,使用GPS信号实现校时的研究工作很多,大多只是通过读取GPS模块解码出的串行数据,提取其中的时间信息来纠正系统时钟,该过程并不涉及NTP的使用,精度较低,一般为几十到几百毫秒。
对此,本文充分利用了NTP服务器软件对GPS 时钟源的支持,采用串行数据和秒脉冲相结合的方式来校准时间,校时精度大为提高。
1 GPS同步时钟的校时方式1.1 GPS介绍GPS(Global Positioning System,全球定位系统)是20世纪70年代美国研制的新一代卫星导航、授时、定位系统。
24颗专用的GPS卫星上都各自带有原子钟,能够全天候向地面广播精确的UTC标准时间。
在许多通用GPS解码芯片解码出的数据流中,除了有位置信息,还包含时间信息(年月日时分秒)和PPS(Pulseper Second,秒脉冲信号),PPS标识了时间信息的起点,其精确度可以到微秒量级。
GPS高精度的时钟的设计和实现
GPS高精度的时钟的设计和实现GPS(全球定位系统)是一种基于卫星的导航系统,可以提供非常精确的时间信息。
GPS时钟是通过接收卫星信号并精确计算其到达时刻来获得高精度的时间。
以下是GPS高精度时钟的设计和实施的详细说明。
设计:1.GPS接收器选择:选择高灵敏度和高性能的GPS接收器。
这将确保接收器可以在较差的信号情况下也能正常工作,并提供高精度的时间信息。
2.天线设计:选择一种高质量的GPS天线,以确保接收器能够有效地接收卫星信号。
通过使用高增益的方向性天线,可以提高信号接收的灵敏度。
3.时钟电路设计:设计一个高精度的时钟电路,以确保时间计算的准确性。
该电路可以采用晶体振荡器作为基准时钟源,并使用锁相环(PLL)控制电路来调整和稳定时钟频率。
4.数据处理和计算:GPS接收器会接收到卫星发送的精确时间和位置信息。
使用计算机或微控制器来接收和处理这些数据,并使用GPS接口协议来解码和计算时间。
确保使用高速和高效的计算方法来确保高精度的时间计算。
实施:1.安装天线和接收器:将GPS天线安装在一个高处,远离任何可能导致信号干扰的物体,例如建筑物或大型金属结构。
将接收器连接到天线,并确保信号连接良好。
2.启动接收器和计算设备:启动GPS接收器,并将其连接到计算设备(计算机或微控制器)。
确保设备之间正确配置和通信,以便正确接收和处理GPS数据。
3.数据接收和处理:接收器将开始接收卫星信号,并获取精确的时间和位置信息。
计算设备将接收并处理这些数据,并根据计算算法计算出高精度的时间。
确保实现高速和高效的数据处理和计算方法。
4.时间校准和稳定:根据计算的高精度时间信息,调整时钟电路的频率,并保持其稳定。
使用锁相环控制电路可以自动调整频率。
定期校准电路,以确保准确性和稳定性。
5.系统测试和验证:对GPS高精度时钟进行系统测试和验证,以确保其在不同环境条件下的准确性和稳定性。
使用其他时间参考源(如国家精确时间源)进行对比测试,并进行校准和调整。
基于GPS标准时钟的智能电能表时钟同步校准技术开发和应用
0 引言
电力系 统 中一 般利 用 G P S的 精 确 授 时 特 点 , 如 以P P S信 号
在~ 2 5~ + 6 0  ̄ C的温度 范围 内 : 时钟准 确度 应 ≤ ±l s / d; 在 参
比温度 ( 2 3  ̄ C) 下, 时钟准确度 ≤ ±0 . 5 s / d 。 时钟 应具有 日历、 计
2 o l 5 . 7
设计与研发
基于 G P S标 准 时 钟 的 智 能 电能 表 时钟 同 步校 准 技 术
开发和应用
黄 建硕 , 李福东
( 1 .国网湖南省 电力公 司培训 中心, 湖南长沙 , 4 1 0 1 3 1 ;2 .国网能源研 究院, 北京,1 0 0 7 6 1 )
c a l i b r a t i 0 n e x p e r i me n t pl a t f o r m i s b ui 1 t . T h r o u g h t h e e x p e r i me n t a l t e s t a n d f i e l d a p p l i c a t i o n , t h e i n t e l l i g e n t
基于Protues的GPS守时授时时钟装置的设计与仿真
1 期
李 秀 丽 ,等 : 基 于 Pous的 G S守 时 授 时 时 钟装 置 的设 计 与 仿 真 rte P
7 5
钟 采用 D 1 0 S 3 2时 钟芯 片 。
22 中断 响应框 图 .
时 钟 芯片 与 中央 处 理单 元 之 间采 用 同 步 串 行 的方 式 进 行通 信 ,在 接 收到 中央 处 理单 元 的 初始 化 命 令后 ,其 内部 时钟 就 会 工 作 ,产 生 时
间数 据 实 现 守 时功 能 。G S接 收 机 通 过 串 口将 P
f应 断 l 响 中
I关 断 l 中 l
● I
标 准 的时 间数 据 送 人 中央 处 理 单 元 ,经 中央 处 理单 元 解 码后 得 到 的 时 间信 号 和秒 脉 冲信 号 分
别 用 于 对本 地 时 钟 ,及 本 地 秒 脉 冲 的校 对 ,实
行。
图 1 G S守 时 授 时 时 钟 装 置 原 理 图 P
Fg1 h c e t iga o Sco k i. T e s h ma i d a r m f c GP l c
1 系 统 工 作 原 理 . 2
该装 置 由接 收 机 ,中 央处 理 单 元 、输 出接
李秀 丽 ,雷 晨 ,孙 艺玫 ,徐 倩
( . 宁 省地 震 局 ,辽 宁 1辽 沈阳 1 0 3 ;2 广 西 壮 族 自治 区地 震 局 ,广 西 10 4 . 南宁 502 ) 30 2
摘 要 :本 文设 计 了一 种 以 G S时 间 为 标 准 信 号 的守 时 授 时 时 钟 装 置 , 阐述 了 该 装 置 的硬 件 组 成 、软 件 实 P
地 点 的数 据 同步 非 常 重要 。随 着 卫 星定 位 系 统 的发展 ,G S技术 在地 震 数 据 采集 装 置 中 已被 P 广 泛应 用 。本 文设 计 了一 种 以 G S时 间为 标 准 P 时 间信 号 的守 时授 时 时钟 装 置 。该 装 置 自身 可 以产生 时 间信 号 及 秒 脉 冲信 号 ,可用 作 台站 数 据 采样 时 钟 。每 隔 一定 的时 间该 装 置 会 自动 接 通 G S接收 机 ,对 采样 时 钟进 行 对 时使 各 个 台 P 站 的采 样 时钟 同步 运行 。 由于采 用 G S时 间对 P 时 ,这 就 保证 了所 有 台站 的 时钟 高精 度 同 步 运
基于GPS的数字时钟设计
摘要伴随着GPS技术的广泛应用,基于GPS技术的数字时钟开始在人们的生产生活中得到越来越广泛的应用。
本文首先描述系统硬件工作原理,并附以系统结构框图加以说明,着重介绍了本系统所应用的各硬件接口技术和各个接口模块的功能及工作过程,详细阐述了程序的各个模块和实现过程。
本设计以数字集成电路技术为基础,单片机技术为核心。
本文的主导思想是软硬件相结合,使用C语言程序来实现对各功能模块的控制。
为了增加了程序的可读性和可移植性,本系统使用C语言进行程序设计。
为了便于扩展和更改,软件的设计采用模块化结构,使程序设计的逻辑关系更加简洁明了。
系统使用AT89C51单片机作为主控芯片,使用DS1302芯片作为主控时钟芯片,使用GPS模块实现对数字时钟时间的校对,并使用1602液晶显示屏进行显示。
本系统使用Proteus进行仿真,并且达到了预期的效果。
关键词:AT89C51单片机;数字时钟;DS1302;GPS;1602液晶屏AbstractAlong with the rapid development of GPS technology,the electronic clock based on GPS technology began to play more and more important role in our daily life.This paper firstly describes the system hardware working principle, each accompanied by a diagram of the system structure of the elucidation, introduces this system by the application of the hardware interface technology and the function of each interface module and the working process, and secondly, expounded the program modules and realization process. This design with digital integrated circuit technology as the foundation, microcontroller technology as the core. In this paper the compiling principle is combining software with hardware, based on the preparation of the functional modules.The system takes microcontroller C language software design, increased the readability of our programs and portability, to facilitate the expansion and change, the design of software modular structure, make the program design of logical relationship more concise. System through AT89C51 for microcontroller, so it has the high speed. The system uses DS1302 for getting time.Through using GPS,so the system can proofread time.System through 1602 LCD display data for carrier, so has the humanized operate and beautiful page effect.The system has been tested successfully in Proteus platform.Keywords: AT89C51 microcontroller; digital clock; DS1302; GPS; 1602 LCD目录1 绪论 (1)1.1 GPS数字时钟出现的背景 (1)1.2 GPS数字时钟出现的意义 (1)1.3 GPS数字时钟的应用 (2)2 系统电路设计 (3)2.1 系统总体设计思路 (3)2.2 设计方案选择 (3)2.3 功能介绍 (4)2.4 工作原理 (4)3 系统单元电路设计 (5)3.1 单片机电路设计 (5)3.1.1 单片机综述 (5)3.1.2 AT89C51的引脚及功能 (6)3.1.3 电源电路设计 (8)3.2 实时时钟电路设计 (9)3.2.1 DS1302的简介 (9)3.2.2 DS1302的工作原理 (10)3.2.3 DS1302的寄存器和控制命令 (10)3.3 GPS硬件设计 (11)3.3.1 GPS的简介 (11)3.3.2 GPS模块的几个重要指标 (11)3.3.3 GPS语句数据格式 (12)3.3.4 HOLUX M-89 GPS模块特性 (14)3.3.5 用串口调试助手查看GPS数据 (15)3.4 显示电路设计 (16)3.4.1 1602字符型LCD简介 (16)3.4.2 1602LCD主要技术参数 (16)3.4.3 引脚功能说明 (16)3.4.4 1602LCD的指令说明及时序 (17)3.5 按键电路设计 (19)4 GPS电子时钟软件设计 (20)4.1 系统软件设计流程图 (20)4.2DS1302计时流程图 (21)4.3 GPS校时流程图 (22)5 软硬件联合调试与仿真 (24)5.1 KEIL简介 (24)5.2 Proteus简介 (25)5.3 软硬件联调 (25)5.4 结论 (27)6 结束语 (28)参考文献 (28)致谢 (29)附录 (30)1 绪论1.1 GPS数字时钟出现的背景从古代的滴漏到近代的机械钟,从电子表到目前的数字时钟,为了准确的测量和记录时间,人们一直在努力改进着计时工具。
基于单片机的GPS高精度授时时钟设计讲解
学士学位毕业设计(论文)基于单片机的GPS高精度授时时钟设计学生姓名:指导教师:所在学院:专业:农业电气化摘要本文设计了一种基于P89LPC952高速单片机的GPS卫星授时时钟。
它由接收机、中央处理单元、LCM显示、键盘、输出接口组成。
利用接收机提供的标准时间信号,通过中央处理单元对数据的处理,从而可同步输出时间数据,保证高精度授时。
这不仅解决了时间获取问题,而且能真正实现全球范围内的时间校准。
更创新性地集成了全世界212个城市的实时时间显示。
与传统方法相比,这种全新的时钟同步方法具有实现手段简单、精度高、范围大、不需通道联系、不受地理和气候条件限制等众多优点,是时钟同步的理想方法。
本文介绍了基于P89LPC952的GPS授时时钟装置的硬件;根据装置要实现的功能,给出了主程序和中断程序的流程图和程序介绍。
关键词:授时时钟P89LPC952 GPS 中央处理单元ABSTRACTABSTRACTA kind of GPS satellite timing clock based on the P89LPC952 High-speed MCU is recommended in the following thesis. It is composed of receptors、central proceeding sections, LCM, keyboard and output connectors. The central proceeding section could deal with the data to make the output time data by use of the standard time signals supplied by receptors, thus, keeping highly precision timing. By this way, not only solve the problem of the time obtained, but also the time in the worldwide is really completely unified. Even more, creatively integrates 212 cities of the world wide’s real-time display. Compared with conventional method, this new synchronous clock plan has many advantages, such as simple, high precision, wide extension, no channels needed, no confine of geography and weather environment and so on. It is the ideal way to synchronize the clock. In the following paper, represent the hardware of the GPS timing clock based on the P89LPC952 High-speed MCU. According to the function of the device, list the flow chart of the main program and the interrupt program and the introduction of those programs.Keywords:Timing clock P89LPC952 GPS Central proceeding section目录摘要 ........................................................................................................ I I ABSTRACT (III)前言 (IV)1.绪论 (1)1.1设计提出的意义 (1)1.2课题主要内容 (1)2.系统设计基础 (2)2.1设计思想 (2)2.2方案选择 (2)2.3本章小结 (3)3.系统组成原理及硬件设计 (4)3.1系统的组成和原理 (4)3.2硬件电路的设计 (4)3.3本章小结 (10)4.软件设计 (11)4.1软件系统结构 (11)4.2主要算法设计 (12)4.3本章小结 (15)5.PCB设计、组装及调试 (16)5.1 PCB的设计 (16)5.2 PCB焊接组装 (17)5.3电路的调试 (17)5.4本章小结 (18)结论 (19)参考文献 (20)致谢 (21)附录1 系统原理图 (22)附录2 主要源代码 (23)前言20世纪70年代的计算机革命产生了一群新的时间用户,他们需要精确的计算机时间。
高精度GPS时钟同步算法研究
高精度GPS时钟同步算法研究随着科技的迅速发展,网络通信越来越普及,各种网络应用的使用也愈发广泛,如电子商务、数据备份、实时视频会议和在线游戏等。
这些应用对于同步时间要求十分严格,传输时间偏差过大会造成数据的丢失、错误等现象,从而影响用户体验,因此,时间同步一直是网络通信的重要问题之一。
高精度GPS时钟同步算法作为一种时间同步方式,受到了广泛的关注和研究。
一、高精度GPS时钟同步算法的基本原理高精度GPS时钟同步算法是通过利用GPS卫星信号的精度高和稳定性强来精确计算本地时钟与GPS标准时钟之间的偏差。
具体来说,通过接收GPS卫星发射的位置和时间信号,利用卫星时钟精度高的特点,计算出卫星信号传输的时间差,再结合GPS接收机的本地时钟信息,从而得出本地时钟与GPS标准时钟之间的误差,进而对本地时钟进行校准,达到同步的目的。
二、高精度GPS时钟同步算法存在的问题尽管高精度GPS时钟同步算法具有精度高、准确性强、稳定性好等优点,但在实际应用中,还存在一些问题需要解决。
1. GPS信号的遮挡和干扰问题。
GPS卫星信号容易受到天气、建筑物、电磁干扰等因素的影响,从而产生误差,导致时钟同步不准确。
2. GPS设备的价格昂贵。
高精度GPS设备需要具备高精度、高稳定性和高抗干扰能力等特点,而这将增加设备的成本,因此,设备成本高是使用高精度GPS时钟同步算法面临的挑战之一。
3. 时钟漂移问题。
即使高精度GPS设备本身的时钟非常准确,随着时间的推移,设备时钟也会出现漂移现象,导致时钟同步误差逐渐增大。
三、解决高精度GPS时钟同步算法存在的问题为解决高精度GPS时钟同步算法存在的问题,需要采用一些有效的方法。
1. 增加GPS接收机的数量和分布区域。
为解决GPS信号遮挡和干扰问题,可以增加GPS接收机的数量和分布区域,通过多个接收机位置的计算来减少误差,从而提高时钟同步精度。
2. 利用其他同步协议,配合使用。
为降低设备成本,可以将高精度GPS时钟同步算法与其他同步协议配合使用,如NTP、PTP等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
GP S 系统具有全方位、全天候、连续性、实时性 和高精度的定位授时功能。GP S 系统的定时秒脉 冲具有非常高的长期稳定性, 其长期准确度优于 1
10- 12 , G P S 接收机输出的 1pps 定时脉冲( 即秒 脉冲信号) 的前沿抖动只有 20ns[ 1] , 因此 GP S 可以 满足大部分的同步定时要求。但是一旦 GPS 信号
关键词 卡尔曼滤波; 加法器时钟; 守时; 时间数 字转换器; 算术平均值滤波算法; 卫星全球定位系统 中图分类号 T P393
Research on Time Keeping Algorithm in GPS Disciplined Digital Timekeeping Clock
T ia n M ing W ang R uiqing ( Co nt rol Science & Eng ineer ing, Huazho ng U niv er sity of Science and T echnolog y, W uhan 430074)
卡尔曼滤波算法通过在 P C 机上用 M AT LAB 软件实现, 单片机和 PC 机之间通过串口( RS 232) 进行通讯。单片机将 T DC 传送过来的 ABC_P PS 与 GPS_P PS 信号前沿的时差通过串口传送给 PC 机, PC 机对时差值进行卡尔曼滤波处理后通过串 口传回给单片机。
14
田 鸣等: 基于 G PS 校准的数 字式守时钟守时算法研究
第 39 卷
ABC_PPS 周期减小, 等效于减小了电路的分频比; 当写入的步距微调值为负数时, 等效于增大了电路 的分频比。由图可知, 步距微调寄存器中的步距值 是否合理是影响守时钟守时精度的关键。
假设为了需 要实现 的守 时精度 优于 1ms/ 天 ( 即: 1m s/ 86400s= 11. 57ns/ s, 等效于晶振总的频 率准确度必须优于 11. 57ns/ s) , 为了留有余量选用 频率稳定度高 的额定 频率 为 20M H z( 周 期 T 0 = 50ns) 的高稳恒温 OCXO 晶振。为了克服 老化对 守时精度产生的影响, 必须要先进行测量校准, 并 保证两次校准期间晶振老化产生的频率准确度误 差不大于总的准确度误差要求。
2 数字式守时钟结构框图和工作原理
图 1 是基于 ABC 时钟电路的 GPS 校准的高 精度数字式守时钟的结构框图。该系统由 GPS 接 收机和天线、单片机、ABC 时钟电路( 由可编程逻 辑芯片实现) 、恒温晶振( OCXO) 、时间间隔测量芯 片 T DC( T ime T o Digit Conv er ter) 、串行接口( RS 232) 、PC 机等构成。
T DC 采 用 德 国 ACAM 公司 的 新 一 代 产 品 T DC GP 2, 其时间测量分辨率为 50ps, 测量范围为 0~ 1. 6 s[ 4] 。单片机采用 T I 公司生产的 M SP 430 单片机, 可编 程逻辑芯片 采用 Xilinx 公司生 产的 Co olRunner CP L D。
* 收稿日期: 2010 年 9 月 11 日, 修回日期: 2010 年 10 月 13 日 作者简介: 田鸣, 男, 硕士研究生, 研究方向: 高精度时钟同 步技术与 时钟守时技 术。王瑞清, 男, 硕士研究生 , 研 究方 向: 卫星授时技术。
2011 年第 3 期
计算机与数字工程
13
的获得晶振的分频比提出了算术平均算法和卡尔 曼滤波算法这两种算法。由于受单片机处理速度 的限制, 算术平均算法比较容易实现, 卡尔曼滤波 算法实现起来则比较复杂, M AT LAB 软件可以做 复杂的算术运算, 于是采用 M AT LAB 实现卡尔曼 滤波, 通过串口与单片机进行通讯, 对单片机输出 的数据进行滤波处理后再把这些数据传送给单片 机, 单片机由此控制送给 ABC 时钟电路的时钟步 距值。最后通过实验得出卡尔曼滤波算法在快速 性和准确性上要优于算术平均值算法。
总第 257 期 2011 年第 3 期
Байду номын сангаас
计算机与数字工程 Computer & D ig ital Eng ineer ing
V o l. 39 No . 3 12
基于 GPS 校准的数字式守时钟守时算法研究*
田 鸣 王瑞清
( 华中科技大学控制科学与工程系 武汉 430074)
摘 要 通常守时系统都采用高稳晶体振荡器 作为频率 标准, 但由 于温度 和老化等 原因导 致其长 期稳定 度不尽 如人 意, 严重影响时钟的守时精度, 改变电路的分频比可以对其进行补偿。数 字式守时钟 采用了固 定频率晶振 驱动的分频 比可 精细微调的基于加法器的时钟电路。首先介绍了一种 G PS 校准的 数字式高 精度守时钟 并讲述了 其工作 原理, 然后对 如何 快速、准确的在数字式守时钟中得到晶振的分 频比补偿值进行了研究, 提 出了算术平 均值滤波 算法和卡尔 曼滤波算法 这两 种算法, 并搭建了实验平台。经验证, 卡尔曼滤波算法在快速性和准确性上要优于算术平均值算法。
Abstract U sua lly, a hig h stability cry stal oscillator is used in the timekeeping sy stem as a clo ck frequency standa rd, but it s draw backs of long t erm stabilit y do no t satisf y applications because o f its ag ing o r some other r easo ns. Co mpensat ion can be achiev ed by v ary ing the frequency dividing r adio fo r the lo ng ter m stability of crystal o scillator . D ig ital timekeeping clock ado pt an adder based clock circuit, with its frequency dividing radio being able t o be adjusted fine and smoo thly. First a pr ecise G PS disciplined dig ital timekeeping clock and its operating pr inciple are intro duced in this paper, t hen on ho w to a chieve the compensat ion o f t he frequency div iding radio in the dig ital timekeeping clo ck quickly and accur ately is studied. T he arithmetic mean filter algo rit hm and K alman filter alg or ithm ar e pro po sed, and ex per imental platfo rm is built. It is pr oved that Kalman filter alg or ithm is super ior to the arithmet ic mean algo rithm in speed and accur acy.
图 1 基于 A BC 时钟电路 的 GP S 校准的 高精度数字式守时 钟的结构框图
3 A BC 时钟电路逻辑框图及步距值 确定
图 2 是 ABC( Adder Based Clock) 时钟电路的 逻辑框图。其原理就是通过一个多位的计数器( 秒 时间值累加器) 不断累加步距值( 步距值寄存器) 来 调整本 地时 钟信 号[ 5] 。 单片 机 发出 的 同步 信号 SYN 通过与 GP S_PPS 相 与 后产生同步清零信 号 SYN_CL R, 在该信号为高电平期间将秒时间值 累加器清零实现秒脉冲 ABC_P PS 与 GPS_PP S 的 同步, 同时控制加法器 2 将步距值寄存器中的步距 值与单片机送入步距微调寄存器中的步距值相加 产生出新的时钟步距值。
步距值寄存器中存储的是晶振周期 T 0 = 1/ f 0 所对应的二进制数值。如图 2 所示晶振分频后的输 出驱动整个时钟系统的运行, 每一个晶振周期秒时 间值累加器与步距值寄存器中的二进制数值进行一 次无符号相加后送回秒时间值累加器中, 当秒时间 值累加 器中的值溢出后将产生秒脉冲 ABC_PPS。 其中步距值寄存器的数值则是由额定步距值常数与 步距微调寄存器中的数值在同步清 零脉冲 SYN _ CLR 的作用下进行补码相加而得到的。步距微调寄 存器的数值是由单片机写入的补码量, 其中最高位 为符号位, 其它位为数值位。这样可以通过改变步 距微调寄存器中的数值而改变秒时间值累加器中的 数值, 从而可以改变对应的秒脉冲 ABC_PPS 的周 期。当写入的步距微调值为正数时, 生成的时钟步 距值增大, 秒时间值累加器溢出提前, 对应的秒脉冲
由于采用二进制数表示晶振周期必然会产生 截断误差, 这 里取 截 断 误 差 不大 于 1ns/ s ( 小 于 11. 57ns/ s且留有余量) , 相应的每个晶振周期的截 断误 差 为 不 大 于 1ns/ 20M H z = 5x 10E - 17s = 50as, 于是可由 1s/ 2- 55 = 27. 76as 知- 55 位对应的 时间值为 27. 76as 满足要求, 故秒时间值累加器的 位数范围为[ - 1 位, - 55 位] 共 55 位。
Key Words K alman filter, adder based clock, timekeeping, time to digit conver ter( T DC) , ar ithmetic mean filter al g or ithm, g lo ba l positioning system( GPS)